JP6697328B2 - ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 - Google Patents
ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 Download PDFInfo
- Publication number
- JP6697328B2 JP6697328B2 JP2016112564A JP2016112564A JP6697328B2 JP 6697328 B2 JP6697328 B2 JP 6697328B2 JP 2016112564 A JP2016112564 A JP 2016112564A JP 2016112564 A JP2016112564 A JP 2016112564A JP 6697328 B2 JP6697328 B2 JP 6697328B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- outer peripheral
- light
- slice level
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002093 peripheral effect Effects 0.000 title claims description 111
- 238000000034 method Methods 0.000 title claims description 11
- 235000012431 wafers Nutrition 0.000 claims description 190
- 238000001514 detection method Methods 0.000 claims description 40
- 238000003384 imaging method Methods 0.000 claims description 12
- 230000001678 irradiating effect Effects 0.000 claims description 6
- 238000005520 cutting process Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 12
- 239000013307 optical fiber Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000009966 trimming Methods 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 229910052724 xenon Inorganic materials 0.000 description 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 1
Images










Landscapes
- Length Measuring Devices By Optical Means (AREA)
- Constituent Portions Of Griding Lathes, Driving, Sensing And Control (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
- Mechanical Treatment Of Semiconductor (AREA)
Description
(1)保持ステップ
図1に示すウェーハWは、円盤状の半導体ウェーハ(例えば、シリコンウェーハ)であり、その表面Waには、デバイス領域Wa1と、デバイス領域Wa1を囲む外周領域Wa2とが設けられている。デバイス領域Wa1は、格子状に配列された分割予定ラインSで複数の領域に区画されており、各領域にはIC等のデバイスDがそれぞれ形成されている。ウェーハWの外周縁Wdは面取り加工されており断面が略円弧状になっている。
加工装置1に備える図2に示す撮像手段2は、保持テーブル30で保持されたウェーハWに光を照射する光照射器20と、保持テーブル30で保持されたウェーハWを撮像し撮像画像を形成するカメラ21とを少なくとも有している。光照射器20は、光源200(例えば、LED又はキセノンランプ等)から発する光の光量を、電圧調整器201によって調整できるようになっている。光照射器20には光ファイバー202が接続されており、光源200から発せられた光は、光ファイバー202内を通ってカメラ21の内部に到達する。カメラ21は、外部光が遮光されたケース210と、ケース210内に配設され光照射器20から発せられ光ファイバー202を介して入射した光を下方に向けて反射して方向変換するハーフミラー211と、ハーフミラー211の下側に配設されハーフミラー211で反射した光が入光する対物レンズ212と、ハーフミラー211の上側に配設された撮像素子213とを備えている。ハーフミラー211は、光照射器20から発せられ光ファイバー202を介して入射した光をウェーハWに導く機能と、ウェーハWからの反射光を透過させて撮像素子213に導く機能とを有している。対物レンズ212の光軸は、保持テーブル30に保持されたウェーハWの表面Waに対して直交している。撮像素子213は、ウェーハWからの反射光を受光し、対応する画像を出力する。なお、撮像手段2は、上下動可能であるとともに、水平面方向に移動可能であってもよい。カメラ21には、CPU及びメモリ等の記憶素子等から構成される制御手段9が接続されている。
図2に示すように、制御手段9は、複数の階層の光量毎に形成された撮像画像をそれぞれ複数の階層のスライスレベルで二値化して二値化画像を形成する二値化処理部91を備えている。撮像画像形成部90が形成した図3に示す撮像画像G1、撮像画像G2、・・・撮像画像Gk・・・、撮像画像Gmは、二値化処理部91に転送される。
図2に示すように、制御手段9は、二値化処理部91で形成された二値化画像における白い画素と黒い画素との境界をウェーハの外周縁の座標位置として検出し記録するウェーハ外周位置検出部92を備えている。ウェーハ外周位置検出部92は、例えば、撮像画像G1に対する二値化画像G10を、図5に示すように、例えば解像度1600×1200の仮想的な出力画面B上に白い画素及び黒い画素に分割して表示し、白い画素と黒い画素との境界のX軸Y軸平面上における座標(x、y)を、ウェーハWの外周縁Wdの座標位置として検出する。そして、図6に示すX軸Y軸座標系上に、検出した各座標を黒点としてプロットし記録していく。図6に示すように、X軸Y軸座標系上には、検出された各座標がウェーハWの円弧に近似する弧状にプロットされていく。
図2に示すように、制御手段9は、ウェーハ外周位置検出部92で記録された位置座標が最も密集する座標位置の光量とスライスレベルとを最適値として設定する光量スライスレベル設定部93を備えている。まず、図6に示すプロット図E1を含む計100図のプロット図が、ウェーハ外周位置検出部92から光量スライスレベル設定部93に転送される。光量スライスレベル設定部93は、例えば、図6に示すプロット図E1中に黒点で示される位置座標が最も密集する座標を特定し、この領域内にある各座標をプロットした際に用いた二値化画像を、二値化画像G10〜二値化画像G1nの中から特定する。さらに、光量スライスレベル設定部93は、特定した二値化画像から、特定した二値化画像を形成した際のスライスレベルを特定する。例えば、特定した二値化画像がG1j(例えば、jは140)1つである場合には、特定されるスライスレベルもスライスレベルj(例えば、スライスレベル140)となるが、特定した二値化画像が二値化画像G1j−1、二値化画像G1j、二値化画像G1j+1のように3つである場合には、特定されるスライスレベルもスライスレベル(j−1)、スライスレベルj、スライスレベル(j+1)、すなわち、スライスレベル139、スライスレベル140、スライスレベル141となる。
光量スライスレベル設定ステップを実施した後、光量スライスレベル設定部93が最終的に最適値として決定したスライスレベル140及び照射光量55%という条件を用いて、加工装置1によりウェーハWを円形状にトリミングする切削加工を行う。
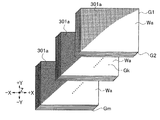
30:保持テーブル 300:テーブル本体 301:環状保持部
301a:環状保持面 302:吸引源
2:撮像手段 20:光照射器 200:光源 201:電圧調整器
202:光ファイバー 21:カメラ 210:ケース 211:ハーフミラー
212:対物レンズ 213:撮像素子
6:加工手段 60:スピンドル 62:モータ 63:切削ブレード
9:制御手段 90:撮像画像形成部 91:二値化処理部
92:ウェーハ外周位置検出部 93:光量スライスレベル設定部
W:ウェーハ Wa:ウェーハの表面 Wb:ウェーハの裏面 Wa1:デバイス領域
Wa2:外周領域 S:分割予定ライン D:デバイス Wd:外周縁
Claims (4)
- ウェーハを保持する保持面を有した保持テーブルと、該保持テーブルで保持されたウェーハに光を照射する光照射器と該保持テーブルで保持されたウェーハを撮像し撮像画像を形成するカメラとを有した撮像手段と、を備えた装置を用いてウェーハの外周位置を検出するウェーハの検出方法であって、
該保持テーブルでウェーハを保持する保持ステップと、
該保持ステップを実施した後、該保持テーブルで保持されたウェーハに該光照射器から複数の階層の光量を照射し該カメラで撮像してウェーハの外周縁を含む撮像画像を複数形成する撮像画像形成ステップと、
該撮像画像形成ステップを実施した後、複数の階層の光量毎に撮像された該撮像画像をそれぞれ複数の階層のスライスレベルで二値化して二値化画像を形成する二値化ステップと、
該二値化ステップで形成された該二値化画像における白い画素と黒い画素との境界をウェーハの外周縁の座標位置として検出し記録するウェーハ外周位置検出ステップと、
該ウェーハ外周位置検出ステップで記録された位置座標が最も密集する座標位置の光量とスライスレベルとを最適値として設定する光量スライスレベル設定ステップと、を備えたウェーハの検出方法。 - 前記ウェーハ外周位置検出ステップで記録された位置座標が最も密集する座標位置の光量とスライスレベルとがそれぞれ複数の階層に至る場合、複数の階層のそれぞれの中央値を最適値として前記光量スライスレベル設定ステップで設定する、請求項1に記載のウェーハの検出方法。
- ウェーハを保持する保持面を有した保持テーブルと、該保持テーブルで保持されたウェーハに光を照射する光照射器と該保持テーブルで保持されたウェーハを撮像し撮像画像を形成するカメラとを有した撮像手段と、該保持テーブルで保持されたウェーハを加工する加工手段と、少なくとも該加工手段を制御する制御手段と、を備えた加工装置であって、
該制御手段は、
該保持テーブルで保持されたウェーハに該光照射器から複数の階層の光量を照射し該カメラで撮像して形成したウェーハの外周縁を含む撮像画像を複数形成する撮像画像形成部と、
複数の階層の光量毎に形成された該撮像画像をそれぞれ複数の階層のスライスレベルで二値化して二値化画像を形成する二値化処理部と、
該二値化処理部で形成された該二値化画像における白い画素と黒い画素との境界をウェーハの外周縁の座標位置として検出し記録するウェーハ外周位置検出部と、
該ウェーハ外周位置検出部で記録された位置座標が最も密集する座標位置の光量とスライスレベルとを最適値として設定する光量スライスレベル設定部と、を備えた加工装置。 - 前記ウェーハ外周位置検出部で記録された位置座標が最も密集する座標位置の光量とスライスレベルとがそれぞれ複数の階層に至る場合、複数の階層のそれぞれの中央値を最適値として前記光量スライスレベル設定部で設定する、請求項3に記載のウェーハの加工装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016112564A JP6697328B2 (ja) | 2016-06-06 | 2016-06-06 | ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016112564A JP6697328B2 (ja) | 2016-06-06 | 2016-06-06 | ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017219364A JP2017219364A (ja) | 2017-12-14 |
| JP6697328B2 true JP6697328B2 (ja) | 2020-05-20 |
Family
ID=60657006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016112564A Active JP6697328B2 (ja) | 2016-06-06 | 2016-06-06 | ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6697328B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7393926B2 (ja) * | 2019-11-27 | 2023-12-07 | 株式会社ディスコ | 加工装置 |
| JP7418919B2 (ja) * | 2020-03-18 | 2024-01-22 | 株式会社ディスコ | ウェーハの外周縁位置の検出条件を選定する選定方法 |
| JP7423157B2 (ja) | 2020-04-30 | 2024-01-29 | 株式会社ディスコ | 加工装置の管理方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07113962B2 (ja) * | 1986-12-19 | 1995-12-06 | マツダ株式会社 | 画像処理方法 |
| JP2008076277A (ja) * | 2006-09-22 | 2008-04-03 | I-Pulse Co Ltd | 検査装置および検査方法 |
| JP4823996B2 (ja) * | 2007-11-02 | 2011-11-24 | 日本電産トーソク株式会社 | 輪郭検出方法及び輪郭検出装置 |
| KR101442153B1 (ko) * | 2008-01-15 | 2014-09-25 | 삼성전자 주식회사 | 저조도 영상 처리 방법 및 시스템 |
| JP5829881B2 (ja) * | 2011-10-07 | 2015-12-09 | 株式会社ディスコ | 切削装置 |
| JP6242619B2 (ja) * | 2013-07-23 | 2017-12-06 | 株式会社ディスコ | 加工装置 |
| JP6174980B2 (ja) * | 2013-11-22 | 2017-08-02 | 株式会社ディスコ | ウェーハの検出方法 |
-
2016
- 2016-06-06 JP JP2016112564A patent/JP6697328B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017219364A (ja) | 2017-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TW201738950A (zh) | 晶圓之加工方法 | |
| JP6602705B2 (ja) | ウェハエッジ検査装置 | |
| JP6697328B2 (ja) | ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 | |
| JP7427333B2 (ja) | エッジアライメント方法 | |
| KR20200071670A (ko) | 절삭 장치 및 절삭 장치를 사용한 웨이퍼의 가공 방법 | |
| KR20100067659A (ko) | 관찰 장치, 관찰 방법, 검사 장치 및 검사 방법 | |
| TWI824071B (zh) | 中心檢測方法 | |
| KR102257264B1 (ko) | 스크래치 검출 방법 | |
| JP6065343B2 (ja) | エッジ検出装置 | |
| KR20210025478A (ko) | 레이저 가공 장치의 가공 결과의 양부 판정 방법 | |
| JP2019155481A (ja) | 切削装置 | |
| CN111801545B (zh) | 线形状检查装置以及线形状检查方法 | |
| JP6671253B2 (ja) | ウェーハの外周位置を検出するウェーハの検出方法及びウェーハの外周位置を検出することが可能な加工装置 | |
| JP6283971B2 (ja) | エッジ検出装置 | |
| JP2024160046A (ja) | ワーク検査方法及び装置 | |
| JP6132682B2 (ja) | キーパターン検出方法 | |
| JP2013063490A (ja) | 切削装置および切削方法 | |
| JP6229789B2 (ja) | エッジ検出装置 | |
| JP2013191775A (ja) | 部品実装装置、および、部品形状測定方法 | |
| US11680911B2 (en) | Marking inspection device, marking inspection method and article inspection apparatus | |
| JP6065342B2 (ja) | エッジ検出装置 | |
| JP2021104542A (ja) | レーザー加工装置及び方法 | |
| JP7418919B2 (ja) | ウェーハの外周縁位置の検出条件を選定する選定方法 | |
| JP2014239134A (ja) | ウェーハの加工方法 | |
| US20240307998A1 (en) | Microscope |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190424 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200318 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200331 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200424 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6697328 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |