JP5003465B2 - 運転支援システム、路上通信装置、および、情報提供装置 - Google Patents
運転支援システム、路上通信装置、および、情報提供装置 Download PDFInfo
- Publication number
- JP5003465B2 JP5003465B2 JP2007331523A JP2007331523A JP5003465B2 JP 5003465 B2 JP5003465 B2 JP 5003465B2 JP 2007331523 A JP2007331523 A JP 2007331523A JP 2007331523 A JP2007331523 A JP 2007331523A JP 5003465 B2 JP5003465 B2 JP 5003465B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- information
- road
- communication device
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Traffic Control Systems (AREA)
Description
そのようなシステムとして、例えば、信号機の作動情報を無線で車両に送信し、前記作動情報に含まれる青信号の残表示時間に応じて車両がブレーキ制御を行う安全運転支援システムが提案されている(特許文献1参照)。
そこで、本願出願人は、ある区間等を所定時間前に既に通過した先行車両の走行データを、その区間等を走行する前に車両に対して提供する運転支援システムを提案した(特願2007−235097号)。このシステムであれば、その区間等を安全に走行し終えた先行車両の走行データを取得できるため、その走行データを参考にすることで、高性能車載機でなくても適切な運転方法を比較的短時間で決定できる。
そこで、本発明は、運転方法を決定すべき対象区間の途中や近傍において発生する事象を考慮して運転方法を決定する運転支援システムを提供することを目的とする。
なお、ここにいう運転方法の決定とは、前記所定区間における走行速度、加速度や操舵角等の車両の制動方法を決定することを指す。
なお、道路事象情報取得手段や選択手段等は、上流側路上通信装置や下流側路上通信装置等に設けても良いし、別途中央装置等を設置してその装置に設けても良い。
(1)前記所定区間における車線変更の回数が所定の回数以上であること
(2)前記所定区間のうち予め決められた地点における走行速度又は加速度が所定の範囲外であること
車載機は、先行車両の走行軌跡情報に加えて、詳細な道路形状を把握できる道路形状情報をも受け取ることで、より一層適切な運転方法を決定することが可能となる。例えば、前記所定区間を走行した先行車両の走行軌跡情報と道路形状情報を比較することで、前記所定区間では多くの車両がカーブにおいて車線を逸脱して走行する傾向にあることなどを把握することができるようになる。
なお、前記一連のサンプル点は前記所定区間を含む道路上に所定の間隔で設けられており、特に、交差点やカーブ、勾配の変動する地点などのように道路形状が変化する地点には原則として配置される。
このようにすることで、車載機は路車間通信によって道路形状情報等を受信した時点において、当該道路形状情報に含まれる所定のサンプル点上に自車が存在することを認識できるようになるためである。
この場合、前記上流側路上通信装置は光ビーコンであることが望ましい。
光ビーコンは近赤外線によって路車間通信を行うから、その通信領域を限られた範囲に限定することができるという利点があるためである。路車間通信領域が限定的であれば、その通信領域を前記所定区間の開始地点もしくはその開始地点よりも上流側の地点に確実に設定することができる。特に、道路形状情報にその路車間通信地点を含めている場合、車載機が路車間通信によって道路形状情報等を受信した時点が、その道路形状情報に含まれる路車間通信地点に到着した時点であると認識でき、自車両の位置を正確に特定できるという利点がある。自車位置を所定区間を走行する直前に正確に知ることができれば、その後の運転制御の精度をより一層高いものとすることができるようになる。
なお、前記上流側路上通信装置として前記道路事象情報取得手段と前記選択手段とを備えさせた路上通信装置(請求項7)も大変有用であるし、路上通信装置とは別に設けられる路側の装置として、前記道路事象情報取得手段と前記選択手段とを備えさせた情報提供装置(請求項8、10)も大変有用である。
(1)前記道路に設置される信号灯器の現在及び将来の表示とその継続時間に関する情報
(2)前記道路上に存在する踏切の現在及び将来の動作とその継続時間に関する情報
(3)前記道路上で停止する先行車両に関する情報
以下、本発明の第1の実施形態を、図面を参照しながら詳細に説明する。
図1は、本発明に係る交通システムの機器配置の概要を示す模式図であり、上流側路上通信装置1、下流側路上通信装置2、信号灯器3Aとこれを制御する交通信号制御機3、情報提供装置5、車両C1及びこの車両に搭載される車載機6を含むものである。
S字カーブを有する道路Rには、該S字カーブよりも所定距離だけ手前に上流側路上通信装置1が、S字カーブを過ぎた地点に下流側路上通信装置2がそれぞれ設置されている。上流側路上通信装置1は車両C1との間で通信を行うためのヘッド(アンテナ)1Aを有しており、同様に、下流側路上通信装置2は車両との間で通信を行うためのヘッド(アンテナ)2Aを有する。なお、道路Rは例えばアップダウンを繰り返す形状など、S字カーブ以外の形状を有していても良い。
ここで、上流側路上通信装置1としては、例えば光ビーコン、電波ビーコンやDSRCなど、無線で路車間通信を実現できる装置であればどのようなものを用いても良い。
この場合、例えばS字カーブ等の区間に接近してくる車両に対して、その区間から所定距離だけ手前の地点で確実に情報を通知したいのであれば、光ビーコン等のように狭域通信を行う路上通信装置を用いることが望ましい。
ここにいう道路形状情報には、道路Rの区間長、車線数や勾配といった道路の形状等に関する情報が含まれている。
なお、前記道路形状情報は、交通管制センターに設置された情報提供装置5からルータ4や通信回線を通じて送られ、予め上流側路上通信装置1の記憶部に格納されている。
ここにいう安全運転支援動作とは、前記道路形状情報等に基づいて、車載機6が道路Rを走行する場合の車両C1の適切な制御方法を決定した上で、自動的にブレーキやアクセルを制御することを指す。この場合、車両によっては完全に車両が自動運転を実施しても良いが、ドライバの運転を支援する(例えばブレーキアシスト等)制御方法であっても良い。
なお、道路Rを走行する全ての車両が前記安全運転支援動作の機能を有する必要はなく、また、前記機能を有する車両であっても当該機能を停止していても良い。
なお、下流側路上通信装置2と車両C1との間でも、同様の手順で路車間通信が行われる。
道路Rを走行する車両C1は、信号灯器3Aが赤信号であれば信号灯器3Aの設置地点よりも手前に設けられた停止線等に従って停止し、青信号であれば当該停止線を通過する。
以下、図2及び図3を用いて前記道路形状情報の詳細を説明する。
図2は道路形状情報の形式の基本的な考え方を説明するための説明図である。
図2に示すように、道路形状情報は、道路上に仮想的に複数のサンプル点S1、S2、・・・を置き、当該サンプル点Snに関連する情報、及びサンプル点間Sn〜Sn+1に関する情報をサンプル点毎に表現したものとして構成される。
この場合、サンプル点Snは、主に道路の形状が変化する箇所に置くことが望ましい。例えば、道路の勾配や曲率などが変化する地点や車線数が増減する地点などである。特に、カーブなどのような曲線形状の区間においては、サンプル点の間隔を短くして、道路形状をより正確に表現できるようにすると良い。また、路上通信装置と路車間通信する地点や交差点などにも置くことが好ましい。
道路形状情報は、(a)に示すように、ヘッダ部、データ部及びフッタ部によって構成される。この場合、ヘッダ部には、道路形状情報のデータサイズやサンプル点数などが格納され、フッタ部には全体のSUM値や誤り検出用のCRC値などが格納される。
このように、道路形状情報には、道路Rの所定区間S1〜S15の全てのサンプル点とそのサンプル点間の情報が順次格納される。
その点では、路車間通信領域が限定的でかつ車線毎に通信可能な光ビーコンを上流側路上通信装置1として用いることが最も好ましい。地点S1に設置した光ビーコンとの路車間通信により、車載機6は、前記道路形状情報の地点S1に到達したことや走行車線などを正確に知ることができる。
例えば、S2地点の情報は、平面上におけるS1地点への車両の進入方向に対してS2地点に向かう道路の方向が時計回りのどちらの方向に何度回転しているのかを示す角度情報と、S2地点までの距離の情報と、S2地点までの勾配の情報を組み合わせたもの(つまりS1からS2へのベクトルの情報)として表現することもできる。
このように、道路形状情報は、車載機6が道路の形状を正確に把握できるような情報であれば、どのような形式であっても良い。
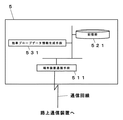
以下、情報提供装置5、上流側路上通信装置1及び下流側路上通信装置2の基本的動作を、図4および図5を用いて説明する。
なお、下流側路上通信装置2の基本的構成は上流側路上通信装置1と同様である。
なお、この他車プローブデータ情報は、1又は複数の個々の車両の走行軌跡に関する走行軌跡情報を含んでいる。
そして、路車間通信領域Q1に進入した車両C1の車載機6は、前記ダウンリンク情報の受信に応じて、当該車両C1の車両IDを含むアップリンク情報を上流側路上通信装置1に対して送信する。なお、このアップリンク情報には、車両C1が路車間通信領域Q1に至るまでの所定の距離の車両C1の走行軌跡に関する自車プローブデータ情報が含まれている。この受信した自車プローブデータ情報等は、送受信手段111によって通信回線等を通じて情報提供装置5に送信される。
なお、前記車線通知情報には、車線番号と車載機6の車両IDとを対応付けた情報が含まれており、前記車線通知情報を受信した車載機6は、自己の車両IDを基に自身の走行車線を認識することができる。
この場合、車両C1から下流側路上通信装置2に対して送信される前記自車プローブデータ情報には、路車間通信領域Q1の地点から路車間通信領域Q2までのS字カーブにおける走行軌跡情報が含まれている。そして、下流側路上通信装置2は受信した自車プローブデータ情報を、通信回線等を通じて情報提供装置5に送信する。
他車プローブデータ情報生成手段531は、記憶部521に記憶されている自車プローブデータ情報のうち、下流側路上通信装置2から送られてきた複数の自車プローブデータ情報を選定する。そして、その中から選択した1又は複数の自車プローブデータ情報の走行軌跡情報を他社プローブデータ情報に含ませて、上流側路上通信装置1に対して送信する。つまり、この他車プローブデータ情報には、道路R上を走行した1又は複数の車両のS字カーブにおける走行軌跡情報が含まれている。
上流側路上通信装置1は、情報提供装置5から送られた該他車プローブデータ情報を路車間通信領域Q1に進入した車載機6に対して送信する。
このシステムによれば、車載機6は、S字カーブを走行する前に、そのS字カーブを既に走行し終えた他車の走行軌跡に関する情報を受信することができるようになる。
次に、この自車プローブデータ情報および他車プローブデータ情報に含まれる1台の車両の走行軌跡情報について説明する(図6)。
走行軌跡情報には、車両が走行中に記録した自車位置に関する情報が時系列に格納されている。具体的には、10秒おきに自車位置の情報を記録する方法や、予め決められた距離(例えば20m等)を走行したと判断される時点毎に記録する方法等がある。この場合、右左折した時点や所定以上の加減速が行われた地点では原則としてその位置情報が記録される。方向指示器、ワイパー、警笛、ヘッドライト等の動作を開始/停止した地点においても自車位置が記録される。
なお、自車位置の情報は車載機に搭載されるGPS受信機等の測位装置を用いて取得することができるし、速度センサ、加速度センサやジャイロなどから速度や操舵角などを取得することができる。
また他車プローブデータ情報には、1又は複数の車両の走行軌跡情報が含まれている。他車プローブデータ情報は情報提供装置5によって作成されるが、例えば、走行速度が所定以上変動した車両、カーブなどの予め決められた地点における速度が所定値以上の車両、頻繁に車線変更を行う車両、あるいは、車線を逸脱して走行した車両など、事前に決められた1又は複数の条件に当てはまらない車両の走行軌跡を他車プローブデータ情報には含ませないようにすることが好ましい。安全な運転あるいは円滑な運転を行わなかった車両の走行軌跡は、運転方法決定における参考情報としては相応しくないためである。
車両の種類や諸元に応じて、適切な運転方法が異なる道路区間も存在するから、これらの情報を付与することで、この情報を受け取った車載機6は、なお一層適切に運転方法を決定することが可能となる。
また、下流側路上通信装置2が受信した自車プローブデータ情報を上流側路上通信装置1に送信し、上流側路上通信装置1自身が他車プローブデータ情報を作成するようにしてもよい。
ここで、信号灯器3AがS字カーブを含む道路区間内あるいは近傍に設置されている場合、その信号灯器3Aの表示に応じて、この区間を走行した車両から受信される自車プローブデータの内容は大きく相違する。
例えば、図1のように信号灯器3Aが下流側路上通信装置2の路車間通信領域Q2の近傍に設置されている場合、信号灯器3Aに接近した時点でその表示が黄信号や赤信号であれば、その車両は信号灯器3Aの手前に設けられた停止線に従って停止する。そのため、その場合に下流側路上通信装置2に対して送信される自車プローブデータは、路車間通信領域Q2に接近するに従って車両の走行速度が減じられ、停止線の手前で停止するような走行軌跡となっている。
一方、信号灯器3Aに接近した時点でその表示が青信号であれば、その車両は停止線で停止せずに通過する。そのため、その場合に下流側路上通信装置2に対して送信される自車プローブデータは、路車間通信領域Q2に接近しても車両の走行速度は大きく変動することなく、停止線の手前で停止せずに通過するような走行軌跡となっている。
具体的には、交通信号制御機3からの情報によって信号灯器3Aの表示状態を把握した上で、黄信号や赤信号時の自車プローブデータに含まれる走行軌跡情報を第一の記憶領域に、青信号時の自車プローブデータに含まれる走行軌跡情報を第二の記憶領域にそれぞれ分別して記憶する。
この場合にも、交通信号制御機3からの情報によって信号灯器3Aの表示状態を把握した上で、その時点において上流側路上通信装置1の路車間通信領域Q1を通過する車両が、S字カーブを経て信号灯器3Aに接近する未来の時点における信号灯器3Aの表示状態を予測した上で、当該予測に応じて他車プローブデータ情報を作成する。
例えば、信号灯器3Aが黄信号や赤信号であると予測される場合には、第一の記憶領域に記憶された1又は複数の走行軌跡情報の中から選択した走行軌跡情報を他車プローブデータ情報に含ませる。一方、信号灯器3Aが青信号であると予測される場合には、第二の記憶領域に記憶された1又は複数の走行軌跡情報の中から選択するようにする。
なお、例えば、信号灯器3Aの表示が青信号であると予測される場合でも、その継続時間が残り僅かであれば、安全性を高めるためには停止線手前で停止するほうが望ましいから、第一の記憶領域の走行軌跡情報を用いる方が良い。
また、上流側路上通信装置1が分別するようにしても良い。その場合、上流側路上通信装置1は、情報提供装置5から送られる他車プローブデータ情報のうち、信号灯器3Aの表示との関係において適切でない走行軌跡情報をその他車プローブデータ情報から除外して車載機に対して送信すれば良い。
図7は、車載機6と車載機6を搭載した車両C1の機能ブロックの概略図である。
車両C1には車載機6の他に、車両C1を進行させるためのエンジンと制動するためのブレーキが備えられている。前記エンジンやブレーキは、ドライバがアクセルペダルやブレーキペダル等を操作することによって制御できるが、この他にも、車載機6からの指示等に基づいて自動的に制御することができる。
また、車両C1には、車載機6からの情報等に基づいて、搭乗者に対して画像や音声等によって各種情報を報知するためのディスプレイ(ヘッドアップディスプレイやカーナビゲーション装置の表示機等)やスピーカが備えられている。
そして、当該時点から、S1地点を出発点として、搭載するGPSや速度計・加速度計等によって自車両の位置を、前記道路形状情報上にリアルタイムにプロットしていく。
このとき、報知情報作成手段611は、スピーカやディスプレイなどを通じて音声や図柄等により、ドライバに対して安全運転支援動作が開始されることを通知することが好ましい。例えば、路車間通信が不良であった場合には、必要な情報を取得できないために安全運転支援動作を開始できないこともあるためである。
そのため、短時間で最適化するためには非常に高い演算能力を持った車載機を導入する必要があった。
例えば、受信した他車プローブデータ情報に含まれる複数の走行軌跡のうち、自車の重量や長さなどの車両諸元が最も近い車両の走行軌跡と全く同一の軌跡を辿るような運転方法を自身の運転方法としてそのまま決定する方法を用いることができる。他車プローブデータ情報に含まれる走行軌跡情報が1つしかない場合は、その車両の走行軌跡と全く同一の軌跡を辿るような運転方法を用いても良い。
この方法によれば、下流側の地点まで安全に走行し終えた車両の運転方法をそのまま採用するので、最適とまでは言えなくても妥当な運転方法を瞬時に求めることが可能となる。
このような方法によれば、自身の基本方針に最も符合した走行を行った先行車両の運転方法をそのまま採用することができるため、簡単かつ短時間で、適切な運転方法を決定することが可能となる。
また、これらの方法では、選択した他車の運転方法をそのまま用いるのではなく、選択した運転方法を自車に合わせて微調整するようにしても良い。例えば、選択した他車よりも自車の重量が大きい場合には、他車の運転方法に比べてカーブへのアプローチ速度やカーブでの走行速度を所定の割合だけ小さくする(例えば1割減速する等)といった方法を用いても良い。自車にかかる遠心力が他車よりも大きくなることに応じた調整である。
なお、先行車両がことごとく車線を逸脱している場合には、これらの先行車両のカーブへのアプローチ速度や加速度が許容される値よりも大きく、求めるべき運転制御パラメータは先行車両の速度等よりも小さい範囲に存在すると判断できる。このような場合には、前記範囲を、取りうる運転制御パラメータの範囲として予め限定した上で繰り返し演算を行うようにしても良い。そうすることで、従来に比べて演算量を減らすことが可能となるため、短時間で適切な運転方法を決定することができる。
ここで、精度が高くない場合とは、具体的には、道路形状情報に含まれる道路勾配や距離等に関する情報の単位が大きいために(例えば5度区切りや10m単位になっている等)、実際の勾配や距離等とは差異がある場合や、地震や経年変化などで勾配等が変化しているような場合、あるいは路面状態センサ等による計測結果に誤りがあり実際には道路が滑りやすくなっている場合等のことを指す。
しかし、本発明では、実際にその道路を走行した他車の実績走行軌跡を用いて運転方法を決定するため、より実際の道路に適した運転方法を簡便に決定することが可能となるのである。
例えば、情報提供装置5が他車プローブデータ情報を作成する場合に、記憶部521に記憶される自車プローブデータ情報のうち、その走行軌跡が安全性を欠くものや他の車両の走行軌跡との差異が大きいものは他車プローブデータ情報に含めないようにしても良い。具体的には、カーブ走行時の速度が所定の閾値以上である、あるいは同じ時間帯に同じ道路を走行した他車の平均速度と所定以上乖離している、頻繁に車線変更を行っている、といった走行軌跡を除外することができる。同様の処理を上流側路上通信装置1が行うこともできる。
あるいは、所定時間(たとえば5分間)内に走行した複数の車両の平均的な走行軌跡を情報提供装置5や上流側路上通信装置1が演算して求めた上で、その走行軌跡を車載機6に提供しても良い。ここにいう平均的な走行軌跡とは、道路R上の各地点における複数の車両の速度や操舵角の平均値や中央値を採用して作成した仮想的な走行軌跡である。この場合、前記各地点は、道路形状情報のサンプル点と一致させることが好ましい。その方が、情報を受信した車載機6が道路形状情報と走行軌跡とを対応付けやすくなるためである。
そして、ドライバに対し、ディスプレイやスピーカを介してその判断の結果に応じた情報を提供するようにしても良い。例えば、前方の信号灯器が間もなく赤信号となるため、停止すべきである、といった警告を音声や画像等を通じてドライバに与えても良い。
例えば、列車の踏切などが設置されている場合にも同様の方法で、他車プローブデータを生成することができる。すなわち、列車の踏切が閉じている場合を信号表示が赤信号の場合と、列車の踏切が開いている場合を信号表示が青信号の場合とみなして他車プローブデータに含ませる先行車両の走行軌跡情報を選択しても良い。
1A 上流側路上通信装置の通信アンテナ
2 下流側路上通信装置
2A 下流側路上通信装置の通信アンテナ
3 交通信号制御機
3A 信号灯器
4 ルータ
5 情報提供装置
6 車載機
111 送受信手段
121 記憶部
131 ダウンリンク情報作成手段
141 路車間通信手段
511 端末装置通信手段
521 記憶部
531 他車プローブデータ情報生成手段
601 路側情報取得手段
611 報知情報作成手段
621 速度制御手段
Claims (10)
- 道路の所定区間に接近する第一の車両に搭載された第一の車載機と、
前記第一の車両よりも前方を走行する第二の車両に搭載された第二の車載機と、
前記所定区間の終了地点又は当該終了地点よりも下流側の地点において、前記第二の車載機から前記第二の車両の前記所定区間における走行軌跡を示す走行軌跡情報を受信する下流側路上通信装置と、
前記所定区間の開始地点又は当該開始地点よりも上流側の地点において、前記第一の車載機に対して、受信した前記第二の車両の走行軌跡情報を送信する上流側路上通信装置と、
前記道路上における車両の進行を妨げる事象についての道路事象情報を取得する道路事象情報取得手段とを含む運転支援システムであって、
前記下流側路上通信装置の受信した走行軌跡情報の中から前記道路事象情報に応じて走行軌跡情報を選択する選択手段をさらに有し、
前記上流側路上通信装置は、前記選択手段の選択した走行軌跡情報を前記第一の車載機に対して送信するように構成されており、
前記第一の車載機は、選択された前記第二の車両の走行軌跡情報を用いて前記所定区間における第一の車両の運転方法を決定するものであり、
前記道路事象情報は、以下の情報のうち少なくとも1つを含むことを特徴とする運転支援システム。
(1)前記道路に設置される信号灯器の現在及び将来の表示とその継続時間に関する情報
(2)前記道路上に存在する踏切の現在及び将来の動作とその継続時間に関する情報
(3)前記道路上で停止する先行車両に関する情報
- 前記選択手段は、以下のうち少なくとも1つの条件を満たす走行軌跡情報を選択対象外とすることを特徴とする請求項1に記載の運転支援システム。
(1)前記所定区間における車線変更の回数が所定の回数以上であること
(2)前記所定区間のうち予め決められた地点における走行速度又は加速度が所定の範囲外であること - 前記選択手段は、前記下流側路上通信装置の受信した走行軌跡情報を車種ごとに分類する分類手段を有し、
前記上流側路上通信装置は、前記第一の車載機に対し、前記第一の車両の車種に応じた走行軌跡情報を送信すること
を特徴とする請求項1又は2に記載の運転支援システム。 - 前記走行軌跡情報は、前記第二の車両が前記所定区間を走行した際の離散的な通過地点に対応した情報を含んでおり、少なくとも前記通過地点の位置に関する位置情報と前記通過地点における通過時刻に関する時刻情報とを含むこと
を特徴とする請求項1乃至3のいずれか1つに記載の運転支援システム。 - 前記上流側路上通信装置は、前記第一の車載機に対し、前記所定区間を含む道路の形状についての道路形状情報を送信するものであり、
前記道路形状情報は、前記所定区間を含む道路上に仮想的に設けた一連のサンプル点の位置に関する情報を含むこと
を特徴とする請求項1乃至4のいずれか1つに記載の運転支援システム。 - 前記一連のサンプル点のうち少なくとも1つは、前記上流側路上通信装置と前記第一の車載機との路車間通信地点であること
を特徴とする請求項5に記載の運転支援システム。 - 請求項1乃至6のいずれか1つの運転支援システムにおいて上流側路上通信装置として用いられる路上通信装置であって、
前記道路事象情報取得手段と前記選択手段とを備えることを特徴とする路上通信装置。
- 請求項1乃至6のいずれか1つの運転支援システムにおける道路事象情報取得手段と選択手段とを備えることを特徴とする情報提供装置。
- 道路の所定区間の開始地点又は当該開始地点よりも上流側の地点において該所定区間に接近する車両に搭載された車載機に対して情報を送信する路上通信装置であって、
前記路上通信装置は、前記所定区間を走行し終えた他の車両の走行軌跡情報のうち、前記所定区間内又はその近傍に設置された信号灯器の表示が進行を許可するものであるか否かに応じて選択された1又は複数の走行軌跡情報を前記車載機に送信すること
を特徴とする路上通信装置。 - 路上通信装置を介して道路上を走行する車両に対して情報提供を行う情報提供装置であって、
前記道路上における車両の進行を妨げる事象についての道路事象情報を取得する道路事象情報取得手段と、
前記道路の所定区間を走行し終えた車両の走行軌跡情報を取得し、取得された走行軌跡情報の中から前記道路事象情報に応じて走行軌跡情報を選択する選択手段とを備え、
前記選択手段で選択された走行軌跡情報を、前記路上通信装置を介して、これから前記所定区間を走行しようとする車両に対して提供するものであり、
前記道路事象情報は、以下の情報のうち少なくとも1つを含むことを特徴とする情報提供装置。
(1)前記道路に設置される信号灯器の現在及び将来の表示とその継続時間に関する情報
(2)前記道路上に存在する踏切の現在及び将来の動作とその継続時間に関する情報
(3)前記道路上で停止する先行車両に関する情報
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007331523A JP5003465B2 (ja) | 2007-12-25 | 2007-12-25 | 運転支援システム、路上通信装置、および、情報提供装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007331523A JP5003465B2 (ja) | 2007-12-25 | 2007-12-25 | 運転支援システム、路上通信装置、および、情報提供装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009157419A JP2009157419A (ja) | 2009-07-16 |
| JP5003465B2 true JP5003465B2 (ja) | 2012-08-15 |
Family
ID=40961421
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007331523A Expired - Fee Related JP5003465B2 (ja) | 2007-12-25 | 2007-12-25 | 運転支援システム、路上通信装置、および、情報提供装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5003465B2 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5299155B2 (ja) * | 2009-08-06 | 2013-09-25 | 住友電気工業株式会社 | プローブ情報生成装置及びコンピュータプログラム |
| JP2011039704A (ja) * | 2009-08-07 | 2011-02-24 | Sumitomo Electric Ind Ltd | プローブ情報の処理装置、コンピュータプログラム及び路車間通信システム |
| CN101958049B (zh) * | 2010-09-21 | 2015-04-15 | 隋亚刚 | 一种城市快速路匝道出口与相邻交叉路口信号灯联动控制系统及方法 |
| JP5895377B2 (ja) * | 2011-06-24 | 2016-03-30 | 富士通株式会社 | ナビゲーション管理方法、及びナビゲーション管理装置 |
| JP5741650B2 (ja) * | 2013-08-21 | 2015-07-01 | 住友電気工業株式会社 | 交通信号情報提供システム、信号制御装置及び情報提供装置 |
| JP6423212B2 (ja) * | 2014-09-12 | 2018-11-14 | 株式会社ゼンリン | 運転支援システム、データ構造 |
| JP2016149050A (ja) * | 2015-02-13 | 2016-08-18 | アルパイン株式会社 | 情報処理装置及び車載装置 |
| JP2016152010A (ja) * | 2015-02-19 | 2016-08-22 | 住友電気工業株式会社 | 蓄積装置、及びコンピュータプログラム |
| JP6507397B2 (ja) * | 2015-06-19 | 2019-05-08 | 住友電工システムソリューション株式会社 | 情報提供システム、情報提供装置、路線信号情報の中継方法、及びコンピュータプログラム |
| WO2017057528A1 (ja) * | 2015-10-01 | 2017-04-06 | 株式会社発明屋 | 非ロボットカー、ロボットカー、道路交通システム、車両共用システム、ロボットカー教習システム及びロボットカー教習方法 |
| JP2018097789A (ja) * | 2016-12-16 | 2018-06-21 | 矢崎エナジーシステム株式会社 | 車両情報システムおよび車両情報記録媒体 |
| JP6692740B2 (ja) * | 2016-12-20 | 2020-05-13 | ヤフー株式会社 | 選択装置、選択方法及び選択プログラム |
| WO2018198163A1 (ja) * | 2017-04-24 | 2018-11-01 | 日産自動車株式会社 | 周囲状況予測方法及び周囲状況予測装置 |
| WO2018211646A1 (ja) * | 2017-05-18 | 2018-11-22 | 日産自動車株式会社 | イベントマップ生成方法及び運転支援方法 |
| WO2019093193A1 (ja) * | 2017-11-08 | 2019-05-16 | ソニー株式会社 | 情報処理装置、車両、移動体、情報処理方法、及びプログラム |
| CN110875797B (zh) | 2018-08-31 | 2022-11-08 | 阿波罗智能技术(北京)有限公司 | 智能驾驶汽车的数据传输方法、装置及设备 |
| CN109191873B (zh) * | 2018-10-15 | 2020-02-21 | 深圳市市政设计研究院有限公司 | 一种交通合流点设置预信号灯的方法及装置 |
| CN109703568B (zh) * | 2019-02-19 | 2020-08-18 | 百度在线网络技术(北京)有限公司 | 自动驾驶车辆行驶策略实时学习的方法、装置和服务器 |
| CN114127822B (zh) * | 2019-07-12 | 2024-05-10 | 日产自动车株式会社 | 信息处理装置、信息处理方法以及信息处理程序 |
| CN114724392B (zh) * | 2022-04-01 | 2023-01-10 | 合肥工业大学设计院(集团)有限公司 | 一种快速路出口匝道与邻接交叉口动态信号控制方法 |
| JP7419450B1 (ja) | 2022-07-22 | 2024-01-22 | セーフィー株式会社 | 情報処理システム、情報処理装置、情報処理方法、プログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003039975A (ja) * | 2001-07-26 | 2003-02-13 | Nissan Motor Co Ltd | 信号に連動した車両走行制御装置 |
| JP2003281690A (ja) * | 2002-03-22 | 2003-10-03 | Matsushita Electric Ind Co Ltd | 交通情報提示方法と装置 |
| JP4075564B2 (ja) * | 2002-10-17 | 2008-04-16 | 日産自動車株式会社 | 車両用情報提供システム |
| JP4367174B2 (ja) * | 2004-02-25 | 2009-11-18 | 株式会社デンソー | 車載送信装置および障害物検知システム |
| JP4639720B2 (ja) * | 2004-09-22 | 2011-02-23 | 日産自動車株式会社 | 車両用情報提供システム及びそのセンタ |
| JP4306749B2 (ja) * | 2006-04-26 | 2009-08-05 | 住友電気工業株式会社 | 光ビーコン |
-
2007
- 2007-12-25 JP JP2007331523A patent/JP5003465B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009157419A (ja) | 2009-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5003465B2 (ja) | 運転支援システム、路上通信装置、および、情報提供装置 | |
| JP2969175B1 (ja) | 走行支援道路システムの合流制御システムにおける本線交通流予測方法 | |
| CN105938365B (zh) | 车辆控制装置 | |
| CN113365895B (zh) | 车辆控制系统和方法 | |
| EP4086875A1 (en) | Self-driving method and related device | |
| CN111731294B (zh) | 行驶控制装置、行驶控制方法以及存储程序的存储介质 | |
| KR20190030199A (ko) | 차량들의 감독 제어 | |
| JP6930610B2 (ja) | 自動運転車両の制御方法および制御装置 | |
| KR20180086632A (ko) | 자율주행 차량의 행동 결정 장치 및 방법 | |
| CN105139677A (zh) | 基于车路协同的无控交叉口车辆通行引导系统及其引导方法 | |
| JP6007739B2 (ja) | 運転支援装置及び運転支援方法 | |
| CN111532267B (zh) | 车辆及其控制装置以及控制方法 | |
| CN111731296B (zh) | 行驶控制装置、行驶控制方法以及存储程序的存储介质 | |
| JP2017146730A (ja) | 経路決定装置 | |
| WO2007069568A1 (ja) | 危険運転予測装置 | |
| CN111731295B (zh) | 行驶控制装置、行驶控制方法以及存储程序的存储介质 | |
| JP2008197881A (ja) | 交通システム、車両および交通信号制御機 | |
| JP6860757B2 (ja) | 交差点通過制御システム | |
| JP7157780B2 (ja) | 自動運転車用情報提示装置 | |
| JP2009069938A (ja) | 運転支援システム、路上通信装置、および、車載機 | |
| JPH11161895A (ja) | 車両速度制御装置 | |
| JP2008269481A (ja) | 運転支援システム及び車載運転支援装置 | |
| JP5640576B2 (ja) | 走行支援装置、及び走行支援システム | |
| JP4432794B2 (ja) | 停車制御装置 | |
| CN113370972B (zh) | 行驶控制装置、行驶控制方法以及存储程序的计算机可读取存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100716 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111220 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120424 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120507 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150601 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |