JP2008197881A - 交通システム、車両および交通信号制御機 - Google Patents
交通システム、車両および交通信号制御機 Download PDFInfo
- Publication number
- JP2008197881A JP2008197881A JP2007031866A JP2007031866A JP2008197881A JP 2008197881 A JP2008197881 A JP 2008197881A JP 2007031866 A JP2007031866 A JP 2007031866A JP 2007031866 A JP2007031866 A JP 2007031866A JP 2008197881 A JP2008197881 A JP 2008197881A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- right turn
- information
- preceding vehicle
- display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 57
- 238000009434 installation Methods 0.000 claims description 9
- 238000000034 method Methods 0.000 description 26
- 238000004891 communication Methods 0.000 description 22
- 238000010586 diagram Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 15
- 238000012545 processing Methods 0.000 description 15
- 230000001133 acceleration Effects 0.000 description 12
- 241000644027 Perideridia lemmonii Species 0.000 description 8
- 239000003086 colorant Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000001737 promoting effect Effects 0.000 description 2
- 206010039203 Road traffic accident Diseases 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000004397 blinking Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images













Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Traffic Control Systems (AREA)
Abstract
【解決手段】右折専用車線に設置された車両感知器3からの車両感知信号に応じて、信号灯器2Aaの右折矢について右折感応制御を実施する交差点において、前記右折矢に関する右折表示情報を車両Cの車載機6に提供する。前記右折表示情報を受け取った車載機6は、前記右折表示情報に基づいて、交通信号制御機1Aによる右折矢の延長等の動作を予測し、前記予測に基づいて車両Cの制御等を行う。車載機6において右折矢の表示がどのタイミングで終了するかを正確に予測することで、右折を予定する車両Cが右折可能か否かを正確に判断することが可能となる。
【選択図】 図1
Description
右折感応制御では、右折専用車線の車両の有無を感知する車両感知器からの信号に基づいて、右折青矢印灯(以下、右折矢という。)の表示時間を短縮あるいは延長する。
そのようなシステムとして、例えば、信号機の青信号等の継続予定時間を無線で車両に送信し、前記青信号等の残表示期間に応じて車両がブレーキ制御を行う安全運転支援システムが提案されている(特許文献1参照)。
特に、右折を予定している車両が交差点を通過することが可能か否かを判断するためには、右折矢の継続期間が確定していることが望ましい。
このため、右折を予定する車両は、信号機設置地点手前の停止線を通過する時点における信号灯色の表示状態を予測できない場合があり、当該停止線をそのまま通過するように制御すべきか停止するように制御すべきかを決定できず、適切なブレーキ制御等を行うことができないという問題がある。
例えば、この発明によって車両が交差点に接近する時点で既に右折矢の表示が終了していると予測されるのであれば、車載機は停止線手前で停止する必要があると判断できるから、停止することを前提として、安全運転支援制御を実行すれば良い。
ここにいう先行車両とは、同一車線において前方を走行する車両を指し、先行車両情報としては、例えば、先行車両が存在するか否かに関する情報、先行車両が存在する場合には該先行車両との車間距離に関する車間距離情報、該先行車両の位置に関する先行車位置情報、及び該先行車両の走行速度に関する先行車走行速度情報等があり、これらのうち少なくとも1つが含まれていると良い(請求項3)。
例えば、先行車両が存在することが分かっていれば、先行車両に応じた右折矢の延長等が実行されるかどうかを判断できるし、その先行車両との車間距離や先行車両の走行速度等が分かれば、先行車両との関係においてどのように車両を制御すれば良いかを正確に判断することができるようになる。
ドライバに対して、的確な報知情報を提供したり、状況に応じて速度を制御したりすることで、ドライバの運転を支援し、安全性を高めることができる。
ここにいう報知情報は、ドライバに対して適切な運転方法を指示等する音声情報や、カーナビゲーション装置の画面やヘッドアップディスプレイに右折矢に関する文字や図柄等の画像情報を指す。また、走行速度の制御には、自動的にブレーキを制御して車両を停止線手前で強制的に停止させたり、車両の減速や加速をアシストしたりすることが含まれる。
これらの情報を用いることで、右折矢の表示期間の範囲を正確に知ることができ、右折矢を表示してからの経過時間と前記範囲との関係に応じて右折矢が延長等されるタイミングを正確に予測することができるようになる。
単位延長青時間とは、前記車両感知器において車両の通過が検知されてから、右折矢を延長する単位時間を指す。単位延長青時間を把握することで、車載機は右折矢が延長等される場合の表示期間を正確に予測することができるようになる。
前記車両感知器の設置位置に関する設置位置情報を取得することで、車両自身や先行車両等が前記車両感知器の設置位置に到着するタイミングを正確に把握できるから、右折感応制御における右折矢の延長等の動作を正確に予測することができるようになる。
単位延長動作とは、前記車両感知器において車両の通過が検知されてから、該通過に応じて逐次右折矢を延長する動作を指し、その経過時間とは、実際に単位延長動作が開始してから経過した時間を指す。
前記経過時間を取得することで、車両自身や先行車両等が前記車両感知器の設置位置に到着するタイミングにおいて単位延長動作が終了しているかどうかを正確に予測できるから、右折矢の延長等の動作をなお一層詳細に把握することができるようになる。
また、右折表示情報を用いて車両を適切に制御することで、右折矢が表示されている間に右折できる確率を高めることができる。
以下、本発明の第1の実施形態を、図面を参照しながら詳細に説明する。
図1は、本発明に係る交通システムの機器配置の概要を示す模式図であり、交通信号制御機1A、車両感知器3A、信号制御装置5、車両C、及び車両Cに搭載された車載機6を含むものである。
また、図5は交通信号制御機1Aの機能ブロックを示すブロック図であり、図8は信号制御装置5の機能ブロックを示すブロック図である。
交差点Aに接続する道路Rには、交差点Aの手前に停止線Pが描かれており、右折車のための右折専用車線が存在する。
交差点Aには交通信号制御機1Aが設置されており、信号灯器2Aaを含む信号灯器の各信号灯色を点灯、消灯、及び点滅させて、交差点Aに向かって進行する1又は複数の車両(図中の車両Cを含む)に対して交通権を表示する。
この右折感応制御は、右折専用車線の車両の存在を検知する車両感知器3Aからの車両感知信号に基づいて右折青矢印灯の表示期間を随時決定する信号制御方法であり、その制御の内容については後述する。
なお、ここにいう車両感知器3Aとしては、超音波感知方式のもの、検知対象が発する赤外線をパッシブに検出して車両を感知する赤外線感知方式のものや、画像処理方式のもの等を採用することができる。
ここにいう信号情報には、例えば、現在表示中の青信号の継続期間や、その後に表示する黄信号、右折矢や赤信号等の表示の順序やその継続予定期間等が格納される。
また、前記通信データには、道路Rの車線数や勾配といった道路の形状等に関する道路形状情報や道路Rの路面状態を通知する路面状態情報等が含まれている。
この右折表示情報には、右折感応制御を行う場合に必要となる右折矢の表示の最小時間並びに最大延長限度時間、右折矢の表示を開始している場合には右折矢の表示を開始してからの経過時間、及び車両の通過に応じて右折矢を随時延長する場合の単位延長青時間、が含まれている。
この場合、交通信号制御機1Aは、作成した信号情報等を光ビーコン等の送信機7に対して、別途通信回線等を通じて送信すれば良い。
また、前記信号情報等はどのような形式であっても良く、例えば信号情報と右折表示情報をあわせて1つの情報としても良いし、逆に信号情報等を2つ以上の複数の情報としても良い。
交通信号制御機1Aは、信号制御装置5からの信号制御指令情報に基づいてサイクル毎に信号制御プランを決定し、サイクル開始時に決定した前記信号制御プランに基づいて、信号灯器2Aa等の各信号灯色を点灯等する機能を有する。
ここにいう信号制御指令情報には、例えば主道路と従道路のそれぞれに対して割り当てるべき青信号の時間又はその割合に関する情報、1サイクルの時間、右折感応制御を含む地点感応制御(例えば、バス感応制御やジレンマ感応制御等)を実施してよいか否かに関する情報等が格納される。
ここにいう安全運転支援動作とは、前記信号情報や道路形状情報等に基づいて、車両Cが停止線Pを通過する時点における信号機の表示状態を予測した上で、例えば前記時点で赤信号になっていると予測される場合には、停止線Pの手前に車両を停止させるように自動的にブレーキを制御したり、ドライバに対して停止を促すような警告を発したりすることをいう。
なお、道路Rを走行する全ての車両が前記安全運転支援動作の機能を有する必要はなく、また、前記機能を有する車両であっても当該機能を停止していても良い。
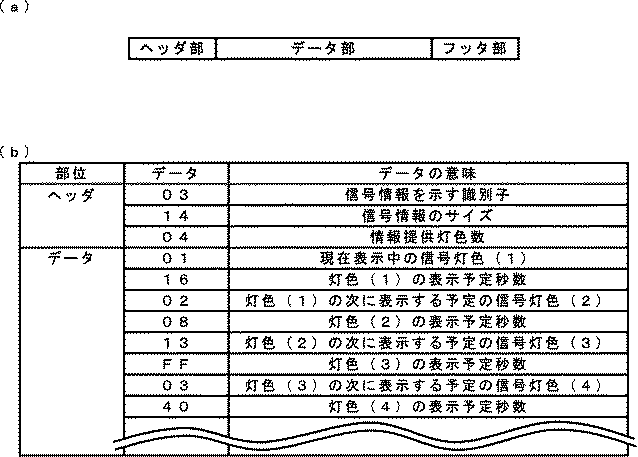
図2に前記信号情報の一例を示す。
(a)は信号情報の基本構造の一例であり、ヘッダ部、データ部、及びフッタ部によって構成されることを示す。
(b)は情報の詳細を示す一例である。
そして、フッタ部にはCRCやSUM値等が格納される。
なお、表示予定秒数は、100msや10ms単位で表現しても良いし、表示予定秒数が不明の場合の表現方法もこれ以外の方法でも良い。
(a)は右折表示情報の基本構造の一例であり、ヘッダ部、データ部、及びフッタ部によって構成されることを示す。
(b)は情報の詳細を示す一例である。
そして、フッタ部にはCRCやSUM値等が格納される。
なお、右折矢の表示を開始してからの経過時間は「FF」となっているが、これは現在、右折矢を表示していないことを示している。実際に右折矢を表示している場合には、表示を開始してからの経過時間が格納される。また、前記右折矢の表示を開始してからの経過時間については、前記信号情報から読み取ることが可能であるから、信号情報が同時に送信されるのであれば省略しても良い。
なお、データの表現方法はどのような形式であっても良く、時間や距離を表現する単位についても、これよりも小さくても大きくても良い。
以下、交通信号制御機1Aの基本的動作を詳しく説明する。
図4は、サイクル開始時に仮決定した各信号灯色の表示期間(設定時間)を格納した仮決定プランテーブル102を示す図である。
図4によれば、例えば、状態3(主道路に右折矢、従道路に赤信号を表示)の予定秒数は20秒であり、状態5(主道路に赤信号、従道路に青信号を表示)の予定秒数は46秒と仮決定されている。
なお、どの状態を対象として右折感応制御を行うかについては、交通信号制御機1Aが予めROM等の記憶部(図示せず)に記憶している。
この場合、信号情報作成手段121は、前記確定した各信号灯色の継続期間に基づいて信号情報を作成するため、信号情報のうち、状態1乃至7に関する部分については全ての継続期間が確定している。
なお、当該サイクルにおいて右折感応制御を実施するかどうかは、信号制御装置5からの指示や交通信号制御機1Aが予めROM等の記憶装置に記憶している定数等に基づいて決定される。
すなわち、信号情報作成手段121は、前記不確定なプランに基づいて信号情報を作成するため、信号情報のうち、状態3に関する部分については継続期間が不明(16進数で「FF」)となる。
なお、このような場合であっても、前記右折感応制御の対象とならない状態1や2等に関する継続期間は確定する。
この場合、右折感応制御を実施する状態3から状態4への信号灯器の切替えは、右折感応制御手段151からの通知に応じて行われる。
右折感応制御手段151は、主道路に対して右折矢の表示を開始した場合(状態3)、車両感知器3Aからの車両感知信号を監視し、この車両感知信号に応じて右折矢の表示を打ち切るタイミングを決定し、信号灯器制御手段141に通知する。信号灯器制御手段141は、前記通知を受けたタイミングで、状態3から状態4に遷移するように信号灯器2Aa等を制御する。
各パタンでは、上段に信号灯器2Aaの表示例、中段に車両感知器3Aにおける車両感知信号の例、下段に右折感応制御による単位延長動作の例、をそれぞれ示している。
中段の車両感知信号は、右折矢の表示開始時点以降の、車両感知器3Aの車両検知領域における車両の存在の有無を示しており、前記車両検知領域に車両が進入した時点で感知信号が立ち上がり、車両が退出(通過)した時点で感知信号が立ち下がる。
下段の単位延長動作は、車両の退出(通過)を検知した時点から、タイマカウンタ等によって単位延長青時間を計時する様子を示しており、図中の斜線を付した矢印記号は単位延長動作によって計時される単位延長青時間を指す。
パタンBでは、右折矢の表示開始から最小時間経過までの間に通過車両があり、当該車両の通過に応じて逐次単位延長動作が行われたが、最後に行われた単位延長動作による単位延長青時間経過までに次の車両の通過が検知されず、その後、最小時間が経過したため、最小時間経過時点で右折矢が打ち切られた例を示している。
パタンDでは、最小時間経過前から最大延長限度時間に至るまで車両が連続して通過し、途切れることなく単位延長動作が実行されたため、前記最大延長限度時間経過時点まで右折矢が表示され続けた例を示している。
次に、信号制御装置5の動作を詳しく説明する。
信号制御装置5は、交通信号制御機1A及び他の交通信号制御機(図示せず)を含む複数の交通信号制御機との間で、送信手段501及び受信手段502により、通信回線を通じて情報を送受信している。
例えば、ある交差点では主道路側と従道路側の交通量の比率が大幅に変動した、ある交差点では流入交通量が交差点の飽和交通流率を上回り飽和状態に達している、といった状況を把握する。
当該信号制御指令情報を受信した各交通信号制御機は、前述の方法等で信号制御プランを決定する。
以下、車載機6の基本的動作を詳しく説明する。
図9は、車載機6と車載機6を搭載した車両Cの機能ブロックの概略図である。
また、車両Cには、車載機6からの情報等に基づいて、搭乗者に対して画像や音声等によって各種情報を報知するためのディスプレイ(ヘッドアップディスプレイやカーナビゲーション装置の表示機等)やスピーカが備えられている。
なお、前記右折表示情報等を提供する光ビーコンや電波ビーコン等が設置されている場合には、これらのインフラ装置等から受信して取得しても良い。
また、前記右折表示情報等を受信した先行車両等から車々間通信等によって取得する方法でも良い。
ここで、先行車両情報とは、先行車両の存在の有無、存在する場合にはその位置や走行速度、先行車両との車間距離等によって構成される。
これらの情報は、例えば、車両Cに取り付けたミリ波レーダセンサ(図示せず)等のセンサによって取得しても良いし、先行車両との車々間通信によって先行車両から取得しても良い。また、前記情報を保持するインフラ装置等から通信によって取得する方法でも良い。
また、速度制御手段631は、前記右折表示情報等及び前記先行車両情報に基づいて、エンジンやブレーキを制御し、車両Cを自動的に制動したり、ドライバの運転をアシストしたりする。
なお、前記右折表示情報等及び先行車両情報に基づいて動作する方法については後述する。
まず、車載機6における運転支援動作の概要を説明する。
図10は、車載機6における運転支援動作の概略を示す処理フローの一例である。
そもそも、右折矢終了後のタイミングで停止線に到達する場合や右折矢の表示開始直後のタイミングで停止線に到着する場合には、信号機の右折感応制御動作を詳細に分析して車両Cを制御する必要がなく、先行車両情報等を用いて動作するまでもないためである。
まず、車載機6において、車両Cが先行車両等に無関係に動作を決定しうるか否か(ステップS601)について判断する。
図11は、車載機6を搭載した車両C、停止線Pや車両感知器3Aの位置関係を示す平面図である。
ここでは、車両Cが停止線Pから距離Lcar手前に位置し、同様に車両感知器3Aの車両検知領域が停止線Pから距離Ldet手前に位置する場合を想定している。
なお、これらの距離情報は、予め車載機6の記憶部等に記憶しておいても良いし、他のインフラ装置等から通信によって取得しても良い。また、距離情報ではなく、車両Cの位置をGPS等によって特定した上で、停止線P等の位置情報を取得して距離を算出する方法でも良い。
なお、停止線Pへの到達時の目標速度Vstopとは、停止線P通過前後に開始する右折動作を安全かつ円滑に行いうる停止線P上での理想的な速度を指す。このVstopについても予め車両Cの記憶部に記憶しておいても良いし、他のインフラ装置等から通信によって取得しても良い。
(I)車両Cが停止線Pに到達した時点で、既に右折矢の最大延長限度時間Tmax経過後であった場合。
(II)車両Cが車両感知器3Aの車両検知領域に到着した時点で、未だに右折矢の表示を開始してから最小時間Tminが経過する前の場合。
なお、右折矢の最小時間をTmin、最大延長限度時間をTmax、単位延長青時間をTuni、そして右折矢を表示し始めてからの経過時間をTcurとする。Tcurは、右折矢の表示開始前であればマイナスの値となる。これらの値は右折表示情報より取得することができる。
一方(II)の場合、通常、車両Cは右折矢が表示されている間に右折を完了できる。けだし、仮に、車両Cが車両感知器3Aの車両検知領域に到着した時点が、右折矢の表示を開始してから最小時間Tminが経過する寸前に相当する場合でも、車両Cの通過によって単位延長動作が実行され、車両Cが右折を完了しうるのに十分な右折矢の表示時間が確保されるためである。すなわち、先行車両の有無に関係なく、車両Cは右折することができる。
(I)の場合には式6が成立し、(II)の場合には式7が成立するから、車載機6は、算出したTdetやTstopに基づいて、これらの条件に合致するか否かを判断すればよい。
上記判断の結果、車両Cが先行車両等に無関係に動作を決定しうると判断された場合には、以下の処理を実施する(処理フロー図10における「1」)。
前記(I)の場合、報知情報作成手段621は「停止線の手前で停止すべき」等のドライバに対する音声報知情報を作成すると共に、これらを文字や図柄として表示する画像報知情報を作成する。ドライバに対して、停止線Pの手前で安全に停止するように報知する。そして、速度制御手段631は、ブレーキを制御して車両Cを停止線Pの手前で停止させるように制動したり、ドライバのブレーキ操作をアシストしたりする。
車両Cは、前方に他の車両が車線変更して割込むといった特段の事情のない限り、安全に右折可能なのであるから、ドライバに慌てずに運転するように報知することで安全性が高まる。
なお、いずれの場合も、ドライバへの報知やブレーキの制御は、いずれか一方のみを実行しても良いし、双方とも実施しても良い。また、報知する情報も音声と画像を同時に報知しても良いし、いずれか一方のみでも良い。また、ドライバへの報知は、例えば右折矢が表示された状態でのみ実施するようにしても良いし、(II)に該当すると判断される場合には、ドライバの注意力が散漫にならないように、そもそも報知を行わないようにしても良い。
次に、車両Cの前方に先行車両が存在するか否かを判断する(ステップS602)。
この判断は、取得した前記先行車両情報に基づいて行う。
ここで先行車両情報には、先行車両が存在するか否かを判断しうる情報、先行車両の走行速度や加速度、先行車両の位置や予定進路、先行車両と車両Cとの車間距離に関する情報等が含まれる。
ここで、先行車両が存在しないと判断される場合、右折矢は車両Cが停止線Pに到達する前に打ち切られる。
先行車両が存在しない場合には、以下の処理を実行する(処理フロー図10における「2」)。
以上のように、先行車両が存在しない視野の広がった状態で右折矢が表示されていると、何とか右折矢が打ち切られる前に右折を完了したいという心理が働き、ドライバは無理な加速を行う等、不安全な運転を行う可能性がある。このような場合に、右折表示情報に基づいて、ドライバに適切な情報を報知したり、速度制御を実行したりすることは交通安全の促進にとって大変有用である。
次に、車両Cの前方の先行車両が右折感応用車両感知器3Aの車両検知領域を通過する前か否かを判断する(ステップS603)。
この判断も、取得した前記先行車両情報に基づいて行う。
例えば、先行車両と停止線Pとの距離を取得できた場合には、当該距離が、停止線Pと車両感知器3Aの車両検知領域との距離Ldetよりも大きい場合は通過前であり、小さい場合は通過後であることが分かる。
また、車両Cと先行車両との車間距離Lccを取得できた場合には、車両Cから車両感知器3Aの車両検知領域までの距離(Lcar−Ldet)よりも車間距離Lccが小さい場合には通過前であり、大きい場合には通過後であることが分かる。
また、先行車両の位置と車両感知器3Aの車両検知領域の位置を、正確な緯度経度に基づいて特定できるのであれば、それらの相対的な位置関係から通過前か否かを判断することもできる。
前記判断により、車両Cの前方の先行車両が右折感応用車両感知器3Aの車両検知領域を通過する前と判断した場合の処理内容について説明する(処理フロー図10における「3」)。
図12は、先行車両が車両感知器3Aの車両検知領域を通過する前における、車両Cや停止線P等の位置関係を示す平面図である。
仮に、Tdetが(T2+Tuni)よりも大きくなると判断した場合、速度制御手段631は、予定していた加速度aを大きくする方向に制御して、(T2+Tuni)よりも小さくなるように制御すれば良い。また、報知情報作成手段621は、「車間距離を縮めるように」促す報知情報を作成すれば良い。
ただし、大幅な加速度の変更を伴って不安全と判断されるような場合には、速度制御手段631は、停止線Pの手前で安全に停止するように車両Cを制動すればよく、報知情報作成手段621は、「停止線手前で停止するように」促す報知情報を作成すれば良い。
このようなケースに該当するか否かを判断したい場合には、例えば前記先々行車両の情報を別途取得して当該先々行車両による単位延長動作の状況を把握する方法を用いても良いし、右折表示情報に、現在実行中の単位延長動作について、その単位延長動作を開始してからの経過時間Txの情報を含ませることにしても良い。前記Txを取得できれば、先行車両が車両感知器3Aの車両検知領域に到着するまでの時間T2と前記Txとの合計値を単位延長青時間Tuniと比較することで、先々行車両による単位延長動作の終了までに先行車両が車両感知器3Aの車両検知領域に到着できるか否かを判断することができる。
一方、車両Cの前方の先行車両が既に右折感応用車両感知器3Aの車両検知領域を通過した後であると判断した場合の処理内容について説明する(処理フロー図10における「4」)。
図13は、先行車両が車両感知器3Aの車両検知領域を通過した後における、車両Cや停止線P等の位置関係を示す平面図である。
なお、単位延長動作を開始してからの経過時間Txの情報が右折表示情報に含まれている場合には、当該TxをT3とみなすことができるため、車載機側で算出する必要はない。
仮に、Tdetが(Tuni−T3)よりも大きくなると判断した場合、速度制御手段631は、予定していた加速度aを大きくする方向に制御して、(Tuni−T3)よりも小さくなるように制御すれば良い。また、報知情報作成手段621は、「車間距離を縮めるように」促す報知情報を作成すれば良い。
ただし、大幅な加速度の変更を伴って不安全と判断されるような場合には、速度制御手段631は、停止線Pの手前で安全に停止するように車両Cを制動すればよく、報知情報作成手段621は、「停止線手前で停止するように」促す報知情報を作成すれば良い。
なお、停止線Pと右折感応用車両感知器の車両検知領域との間の距離が不明な場合や、自車と停止線Pまでの距離が不明な場合には、先行車両との相対的な位置関係のみに応じて車両Cを制御する方法を用いても良い。
すなわち、先行車両との車間距離Lccを走行するのに要する時間が、常に単位延長青時間Tuni以下となるように走行することで、先行車両によって実行される単位延長動作が車両Cの手前で打ち切られることを回避することが可能になる。この場合、少なくとも右折感応制御における単位延長青時間を取得すれば、車両Cを制御することができる。
1Aa 通信アンテナ
2Aa 信号灯器
3A 車両感知器
4 ルータ
5 信号制御装置
6 車載機
7 送信機
101 信号制御プラン作成手段
102 仮決定プランテーブル
121 信号情報作成手段
131 右折表示情報作成手段
141 信号灯器制御手段
151 右折感応制御手段
501 送信手段
502 受信手段
521 信号制御指令作成手段
531 交通状況取得手段
532 交通情報データベース
601 右折表示情報等取得手段
611 先行車情報取得手段
621 報知情報作成手段
631 速度制御手段
Claims (11)
- 右折専用車線を有する道路において、前記右折専用車線の車両の有無を感知する車両感知器と、
信号灯器のうち右折青矢印灯の表示時間について、前記車両感知器からの車両感知信号に基づいて右折感応制御を実行する交通信号制御機と、
前記右折青矢印灯の表示に関する右折表示情報を作成する右折表示情報作成手段と、
前記右折表示情報を前記道路上の所定の領域に送信する送信手段と、
車両に搭載され前記所定の領域において前記右折表示情報を受け取る車載機とを含む交通システムであって、
前記車載機は、前記右折表示情報に基づいてドライバへの安全運転支援動作を行う安全運転支援制御手段を有すること
を特徴とする交通システム。 - 前記車載機は、
先行車両に関する先行車両情報を取得する先行車両情報取得手段を有し、
前記安全運転支援制御手段は、取得した前記先行車両情報を用いてドライバへの安全運転支援を行うこと
を特徴とする請求項1に記載の交通システム。 - 前記先行車両情報には、
先行車両が存在するか否かに関する情報、先行車両が存在する場合には該先行車両との車間距離に関する車間距離情報、該先行車両の位置に関する先行車位置情報、及び該先行車両の走行速度に関する先行車走行速度情報のうち少なくとも1つが含まれること
を特徴とする請求項2に記載の交通システム。 - 前記安全運転支援制御手段は、
報知情報作成手段と速度制御手段のうち少なくとも1つを含み、
前記報知情報作成手段は、前記右折表示情報に基づいてドライバへの報知情報を作成し、
前記速度制御手段は、前記右折表示情報に基づいて車両の走行速度を制御すること
を特徴とする請求項1乃至3のいずれかに記載の交通システム。 - 前記右折表示情報には、
前記右折青矢印灯を表示してからの経過時間と、
前記右折青矢印灯を表示する最小時間と、
前記右折青矢印灯を表示する最大延長限度時間が含まれること
を特徴とする請求項1乃至4のいずれかに記載の交通システム。 - 前記右折表示情報には、
前記右折青矢印灯についての単位延長青時間が含まれること
を特徴とする請求項1乃至5のいずれかに記載の交通システム。 - 前記右折表示情報には、
前記車両感知器の設置位置に関する設置位置情報が含まれること
を特徴とする請求項1乃至6のいずれかに記載の交通システム。 - 前記右折表示情報には、
前記交通信号制御機において実行される右折感応制御の単位延長動作の経過時間に関する情報が含まれること
を特徴とする請求項1乃至7のいずれかに記載の交通システム。 - 請求項1乃至8のいずれかに記載の交通システムに用いられることを特徴とする車載機。
- 請求項9に記載の車載機を搭載した車両。
- 前記右折表示情報作成手段と前記送信手段を有し、請求項1乃至8のいずれかに記載の交通システムに用いられることを特徴とする交通信号制御機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031866A JP4661797B2 (ja) | 2007-02-13 | 2007-02-13 | 交通システム、車両および交通信号制御機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007031866A JP4661797B2 (ja) | 2007-02-13 | 2007-02-13 | 交通システム、車両および交通信号制御機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008197881A true JP2008197881A (ja) | 2008-08-28 |
| JP4661797B2 JP4661797B2 (ja) | 2011-03-30 |
Family
ID=39756773
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007031866A Expired - Fee Related JP4661797B2 (ja) | 2007-02-13 | 2007-02-13 | 交通システム、車両および交通信号制御機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4661797B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010097269A (ja) * | 2008-10-14 | 2010-04-30 | Toyota Motor Corp | 運転支援装置 |
| JP2010102522A (ja) * | 2008-10-24 | 2010-05-06 | Mitsubishi Electric Corp | 情報提供装置および情報提供方法 |
| JP2011065556A (ja) * | 2009-09-18 | 2011-03-31 | Sumitomo Electric Ind Ltd | 交通信号情報提供システム、信号制御装置及び情報提供装置 |
| JP2011090379A (ja) * | 2009-10-20 | 2011-05-06 | Toyota Motor Corp | 運転支援装置 |
| JP2013149053A (ja) * | 2012-01-19 | 2013-08-01 | Mitsubishi Motors Corp | 運転支援システム |
| CN103426307A (zh) * | 2013-09-02 | 2013-12-04 | 武汉大学 | 一种可供盲人用的红绿灯提示装置 |
| JP2014149797A (ja) * | 2013-02-04 | 2014-08-21 | Sumitomo Electric Ind Ltd | 信号制御システム及び走行情報抽出装置 |
| JP2016045830A (ja) * | 2014-08-26 | 2016-04-04 | 株式会社京三製作所 | 交通信号制御装置 |
| JP2020149091A (ja) * | 2019-03-11 | 2020-09-17 | オムロン株式会社 | 感応制御交差点の交通情報処理装置、交通情報処理方法及び交通情報処理プログラム |
| KR20210097235A (ko) * | 2020-01-28 | 2021-08-09 | 한양대학교 에리카산학협력단 | 자율주행 차량의 군집 주행 시스템 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003099896A (ja) * | 2001-09-20 | 2003-04-04 | Nissan Motor Co Ltd | 交差点走行支援装置 |
| JP2004199123A (ja) * | 2002-12-16 | 2004-07-15 | Hitachi Kokusai Electric Inc | 信号機自動時間調整システム |
| JP2006285732A (ja) * | 2005-04-01 | 2006-10-19 | Xanavi Informatics Corp | 車載端末装置 |
-
2007
- 2007-02-13 JP JP2007031866A patent/JP4661797B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003099896A (ja) * | 2001-09-20 | 2003-04-04 | Nissan Motor Co Ltd | 交差点走行支援装置 |
| JP2004199123A (ja) * | 2002-12-16 | 2004-07-15 | Hitachi Kokusai Electric Inc | 信号機自動時間調整システム |
| JP2006285732A (ja) * | 2005-04-01 | 2006-10-19 | Xanavi Informatics Corp | 車載端末装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010097269A (ja) * | 2008-10-14 | 2010-04-30 | Toyota Motor Corp | 運転支援装置 |
| JP2010102522A (ja) * | 2008-10-24 | 2010-05-06 | Mitsubishi Electric Corp | 情報提供装置および情報提供方法 |
| JP2011065556A (ja) * | 2009-09-18 | 2011-03-31 | Sumitomo Electric Ind Ltd | 交通信号情報提供システム、信号制御装置及び情報提供装置 |
| JP2011090379A (ja) * | 2009-10-20 | 2011-05-06 | Toyota Motor Corp | 運転支援装置 |
| JP2013149053A (ja) * | 2012-01-19 | 2013-08-01 | Mitsubishi Motors Corp | 運転支援システム |
| JP2014149797A (ja) * | 2013-02-04 | 2014-08-21 | Sumitomo Electric Ind Ltd | 信号制御システム及び走行情報抽出装置 |
| CN103426307A (zh) * | 2013-09-02 | 2013-12-04 | 武汉大学 | 一种可供盲人用的红绿灯提示装置 |
| JP2016045830A (ja) * | 2014-08-26 | 2016-04-04 | 株式会社京三製作所 | 交通信号制御装置 |
| JP2020149091A (ja) * | 2019-03-11 | 2020-09-17 | オムロン株式会社 | 感応制御交差点の交通情報処理装置、交通情報処理方法及び交通情報処理プログラム |
| JP7070477B2 (ja) | 2019-03-11 | 2022-05-18 | オムロン株式会社 | 感応制御交差点の交通情報処理装置、交通情報処理方法及び交通情報処理プログラム |
| KR20210097235A (ko) * | 2020-01-28 | 2021-08-09 | 한양대학교 에리카산학협력단 | 자율주행 차량의 군집 주행 시스템 |
| KR102345959B1 (ko) | 2020-01-28 | 2022-01-03 | 한양대학교 에리카산학협력단 | 자율주행 차량의 군집 주행 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4661797B2 (ja) | 2011-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4661797B2 (ja) | 交通システム、車両および交通信号制御機 | |
| JP4849022B2 (ja) | 交通システムおよび交通信号制御機 | |
| JP4998071B2 (ja) | 路車間通信システム、車載機、車両および交通信号制御機 | |
| WO2010073378A1 (ja) | 運転支援装置 | |
| WO2011114386A1 (ja) | 情報提供装置 | |
| JP5152284B2 (ja) | 運転者支援装置、および運転者支援システム | |
| JP2009157419A (ja) | 運転支援システム、路上通信装置、および、車載機 | |
| JP5988785B2 (ja) | 運転支援装置 | |
| JP2011070356A (ja) | 車両の走行支援システム及び方法 | |
| CN111762167B (zh) | 车辆用驾驶辅助装置 | |
| JP2008165687A (ja) | 交通システム、交通信号制御機および信号制御装置 | |
| JP4687817B2 (ja) | 路車間通信システム及び光ビーコン | |
| JP4983375B2 (ja) | 交通システム、車載機、車両および交通信号制御機 | |
| JP4935998B2 (ja) | 路車間通信システム及び路上装置 | |
| JP5045228B2 (ja) | 路車間通信システム、車載機、車両および交通信号制御機 | |
| JP4807308B2 (ja) | 交通システム、車両および交通信号制御機 | |
| JP2008186349A (ja) | 路車間通信システム、光ビーコン、車載機、及び車両 | |
| JP5408071B2 (ja) | 運転者支援装置 | |
| JP5640576B2 (ja) | 走行支援装置、及び走行支援システム | |
| KR20180077883A (ko) | 신호 제어기에 연동되는 차량 제어시스템 | |
| JP2011070358A (ja) | 信号機の点灯状態判断システム及び車両の走行支援システム | |
| JP4715788B2 (ja) | 車両制御システム、車載装置及び車両 | |
| JP2008152323A (ja) | 交通システム、交通信号制御機、及び、信号制御装置 | |
| JP2004258867A (ja) | 信号機情報伝達システム | |
| JP4770848B2 (ja) | 交通システム及び中央装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080618 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100831 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101025 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4661797 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140114 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |