JP4716743B2 - 自動変速機の変速制御方法および装置 - Google Patents
自動変速機の変速制御方法および装置 Download PDFInfo
- Publication number
- JP4716743B2 JP4716743B2 JP2005020585A JP2005020585A JP4716743B2 JP 4716743 B2 JP4716743 B2 JP 4716743B2 JP 2005020585 A JP2005020585 A JP 2005020585A JP 2005020585 A JP2005020585 A JP 2005020585A JP 4716743 B2 JP4716743 B2 JP 4716743B2
- Authority
- JP
- Japan
- Prior art keywords
- learning
- power
- control
- undershoot
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Control Of Transmission Device (AREA)
Description
オフアップ時でもわずかな逆負荷状態であれば、エンジントルクと車輪側からのトルク入力との差が小さいので、タービン回転数の降下速度が低い。つまり、タービン回転がゆっくりと降下するため、高速段の回転数に到達した際に殆どアンダーシュートは発生しない。このような状況であるかどうかは、エンジン回転数と負荷情報(例えばアクセル開度)によって推定できる。そこで、請求項1では、オンアップ・オフアップの閾値よりもオフアップ側に学習実施判定値を設け、オフアップ時にエンジン回転数と負荷情報とが閾値と学習実施判定値との間の領域にあるのか、それとも学習実施判定値よりオフアップ側にあるのかを判定し、これによって学習制御を実施するか否かを判別している。
つまり、オフアップでも僅かな逆負荷状態(アンダーシュートが小さいと予想される状態)では、学習制御を禁止することで、初期油圧が不必要に学習補正されるのを防止している。また、大きな逆負荷状態(アンダーシュートが発生しそうな状態)では、学習制御を実施することで、アンダーシュートが適正値に調整される。
パワーオンアップ・パワーオフアップの閾値をエンジン回転数と負荷情報とに基づいて設定したが、エンジン回転数に代替する情報として入力回転数(タービン回転数)を用いてもよい。また、負荷情報としてはアクセル開度や吸気管負圧などを用いることができる。
また、アンダーシュートを学習制御するために、制御量として摩擦係合要素の初期油圧を用いたが、初期油圧に相当する摩擦係合要素を制御する電磁弁の入力電流を用いてもよいし、デューティ比を用いてもよい。
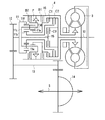
エンジン1の出力は自動変速機2のトルクコンバータ3を経て変速機構4に伝達され、さらに変速機構4は出力軸5を介して車輪(図示せず)に連結されている。自動変速機2はエンジン1によりトルクコンバータ3を介して駆動されるオイルポンプ6を備え、このオイルポンプ6の吐出圧は油圧制御装置7へ送られる。油圧制御装置7は変速制御用の第1〜第3ソレノイドバルブ21〜23を備えており、これらソレノイドバルブ21〜23をATコントローラ20で制御することにより、変速機構4に内蔵されている各種摩擦係合要素の油圧を走行状態に応じて制御している。ここでは、ATコントローラ20にエンジン回転数,スロットル開度,タービン回転数,車速,シフトポジションなどの信号が入力されているが、この他の信号を入力してもよい。
なお、油圧制御装置7に、変速制御用の3個のソレノイドバルブ21〜23の他に、ロックアップクラッチ制御用やライン圧制御用などのソレノイドバルブを設けてもよい。
変速機構4は、トルクコンバータ3を介してエンジン動力が伝達される入力軸10、摩擦係合要素である3個のクラッチC1〜C3および2個のブレーキB1,B2、ワンウエイクラッチF、ラビニヨウ型遊星歯車機構11、差動装置14などを備えている。
第1〜第3ソレノイドバルブ21〜23は微妙な油圧制御を行なう必要があるため、デューティソレノイドバルブまたはリニアソレノイドバルブが用いられる。また、この実施例では、第1ソレノイドバルブ21は常閉型、第2,第3ソレノイドバルブ22,23は常開型が用いられている。
図4に示す変速線図は、Dレンジの変速線図であり、実線はアップシフト線、破線はダウンシフト線を示す。
図5に示す判定マップは、エンジン回転数とスロットル開度(アクセル開度)とによって設定されており、閾値Aより上側(高アクセル開度側)がパワーオンアップ領域であり、閾値Aより下側(低アクセル開度側)がパワーオフアップ領域である。閾値Aより下側には別の閾値Bが設定されており、この閾値Bは学習実施判定値である。閾値Aと学習実施判定値Bとの間の領域は、オフアップであるがアンダーシュート学習制御の禁止領域であり、学習実施判定値Bより下側がオフアップであってかつアンダーシュート学習制御の実施領域である。
なお、図4,図5に示す図は典型的な一例を示したものであり、この図に限定されるものではない。
ここでは、アンダーシュートが発生した場合のタービン回転数、B1ブレーキ制御用ソレノイドバルブ21の入力電流、B1ブレーキ圧の時間変化を示してある。
図6において、B1ブレーキの初期油圧Pi、または初期油圧を出力するためのソレノイドバルブ21の入力電流Iaが後述するアンダーシュート学習制御で補正される。
図7において、スタートすると、まずオフアップの変速指令が出力されたか否かを判別する(ステップS1)。この判別は、車速およびスロットル開度が図4に示す変速線図のアップシフト線を越えたこと、およびエンジン回転数およびスロットル開度(アクセル開度)が図5に示す判定マップの閾値Aより下側にあることで判定する。
オフアップの変速指令が出力された時には、図5に示す判定マップからエンジン回転数に対する学習実施判定値(アクセル開度)を検索し(ステップS2)、変速指令時のアクセル開度と学習実施判定値とを比較する(ステップS3)。アクセル開度が学習実施判定値以上であれば、図5における学習制御の禁止領域にあるので、学習実施フラグをOFFとし(ステップS4)、アクセル開度が学習実施判定値未満であれば、図5における学習制御の実施領域にあるので、学習実施フラグをONとし(ステップS5)、終了する。
つまり、オフアップであっても僅かな逆負荷状態であれば、本来はアンダーシュートが殆ど発生しない領域であるから、不必要な学習補正がなされないように、学習を禁止している。
アンダーシュートが発生していない場合は、学習更新量を所定値(負の値)とし(ステップS8)、前回値にこの学習更新量を加算した値を学習値とする(ステップS9)。具体的には、前回出力した初期油圧から一定値を引算した値を初期油圧として用いる。したがって、アンダーシュートが発生していない場合は、初期油圧が高過ぎると判定され、初期油圧は徐々に低く補正される。
一方、アンダーシュートが発生している場合は、学習更新量を次式で演算する(ステップS10)。
学習更新量=ゲイン×(アンダーシュート量−アンダーシュート目標値)
アンダーシュート量が目標値より大きいときには、学習更新量が正の値となるので、ステップS9で学習値である初期油圧は高目に補正される。逆に、アンダーシュート量が目標値より小さいときには、学習更新量が負の値となるので、ステップS9で学習値である初期油圧は低目に補正される。このように補正された初期油圧を用いて以後のオフアップ制御が実施される。
上記のような学習を経験することで、何回かのオフアップを経験した後では、初期油圧が最適値に更新され、アンダーシュート量が所定範囲内に制御される。そのため、ショックのない安定した変速を実現することができる。
上記実施例では、1速から2速へのオフアップ変速、つまりB1ブレーキの油圧制御について説明したが、その他のオフアップ変速(例えば2速から3速、3速から4速)における摩擦係合要素の油圧制御にも同様に適用できる。
なお、本発明の自動変速機は、図3に示すような3個のクラッチC1〜C3と2個のブレーキB1,B2を有する自動変速機に限るものではない。
20 ATコントローラ
21 B1ブレーキ制御用ソレノイドバルブ
Claims (2)
- 摩擦係合要素を係合または解放することにより所定の変速段を構成する自動変速機であって、
エンジン回転数と負荷情報とに基づく閾値によってパワーオンアップ領域とパワーオフアップ領域とを設定し、各領域に応じて変速制御を実施すると共に、パワーオフアップ時の入力回転のアンダーシュートを学習制御により適正量に制御する変速制御方法において、
エンジン回転数と負荷情報とが、上記閾値よりパワーオフアップ側にあるかどうかを判定するステップと、
上記エンジン回転数と負荷情報とが閾値よりパワーオフアップ側にあるとき、上記閾値よりもパワーオフアップ側に設けられた学習実施判定値よりさらにパワーオフアップ側にあるかどうかを判定するステップと、
上記エンジン回転数と負荷情報とが上記学習実施判定値よりさらにパワーオフアップ側にあるとき、上記学習制御を実施するステップと、
上記エンジン回転数と負荷情報とが上記閾値と学習実施判定値との間の領域にあるとき、上記学習制御を禁止するステップと、を有する変速制御方法。 - 摩擦係合要素を係合または解放することにより所定の変速段を構成する自動変速機であって、
エンジン回転数と負荷情報とに基づく閾値によってパワーオンアップ領域とパワーオフアップ領域とを設定し、各領域に応じて変速制御を実施すると共に、パワーオフアップ時の入力回転のアンダーシュートを学習制御により適正量に制御する変速制御装置において、
上記閾値よりもパワーオフアップ側に学習実施判定値を設け、
上記閾値と上記学習実施判定値との間の領域を上記学習制御の禁止領域としたことを特徴とする変速制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005020585A JP4716743B2 (ja) | 2005-01-28 | 2005-01-28 | 自動変速機の変速制御方法および装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005020585A JP4716743B2 (ja) | 2005-01-28 | 2005-01-28 | 自動変速機の変速制御方法および装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006207696A JP2006207696A (ja) | 2006-08-10 |
| JP4716743B2 true JP4716743B2 (ja) | 2011-07-06 |
Family
ID=36964790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005020585A Expired - Fee Related JP4716743B2 (ja) | 2005-01-28 | 2005-01-28 | 自動変速機の変速制御方法および装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4716743B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021021358A (ja) * | 2019-07-25 | 2021-02-18 | トヨタ自動車株式会社 | 車両の制御装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08247271A (ja) * | 1995-03-13 | 1996-09-24 | Mitsubishi Motors Corp | 自動変速機の変速制御装置 |
| JP3492295B2 (ja) * | 2000-07-21 | 2004-02-03 | ダイハツ工業株式会社 | 自動変速機の変速制御方法 |
| JP2003269590A (ja) * | 2002-03-13 | 2003-09-25 | Daihatsu Motor Co Ltd | 自動変速機の変速制御方法 |
| JP4133503B2 (ja) * | 2003-03-27 | 2008-08-13 | ジヤトコ株式会社 | 自動変速機の制御装置 |
-
2005
- 2005-01-28 JP JP2005020585A patent/JP4716743B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006207696A (ja) | 2006-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3269333B2 (ja) | 自動変速機の変速制御装置 | |
| JP6225985B2 (ja) | 自動変速機の制御装置 | |
| JP4453714B2 (ja) | 車両の制御装置 | |
| JP2005098353A (ja) | 自動変速機の制御装置 | |
| JPH0599316A (ja) | 自動変速機の変速制御装置 | |
| JP4849928B2 (ja) | 自動変速機の変速制御装置 | |
| JP4201563B2 (ja) | 自動変速機の変速制御方法 | |
| JP4835722B2 (ja) | 自動変速機の制御装置および制御方法 | |
| KR100496360B1 (ko) | 자동 변속기용 변속 제어 장치 | |
| US9028364B2 (en) | Control device for automatic transmission | |
| JP4716743B2 (ja) | 自動変速機の変速制御方法および装置 | |
| JP3492295B2 (ja) | 自動変速機の変速制御方法 | |
| JP3618259B2 (ja) | 車両用自動変速機の制御方法 | |
| JP4525389B2 (ja) | 自動変速機の制御装置 | |
| JP2005337410A (ja) | 自動変速機の変速制御方法 | |
| JP4569513B2 (ja) | 車両の制御装置 | |
| JP4201561B2 (ja) | 自動変速機の変速制御方法 | |
| JP3949383B2 (ja) | 自動変速機のソレノイド制御方法 | |
| JP5126130B2 (ja) | フューエルカット制御装置 | |
| KR19980086999A (ko) | 차량용 자동 변속기의 선택-충격 제어 시스템 | |
| JP3775497B2 (ja) | 自動変速機の制御方法 | |
| JP4622501B2 (ja) | 自動変速機の制御装置 | |
| JP6520804B2 (ja) | 車両用自動変速機の制御装置 | |
| JP4353776B2 (ja) | 自動変速機の制御方法 | |
| JP4799215B2 (ja) | 車両用自動変速機の変速制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100817 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100917 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110329 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110329 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140408 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |