JP4333743B2 - 操舵装置 - Google Patents
操舵装置 Download PDFInfo
- Publication number
- JP4333743B2 JP4333743B2 JP2007001912A JP2007001912A JP4333743B2 JP 4333743 B2 JP4333743 B2 JP 4333743B2 JP 2007001912 A JP2007001912 A JP 2007001912A JP 2007001912 A JP2007001912 A JP 2007001912A JP 4333743 B2 JP4333743 B2 JP 4333743B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- power
- determination threshold
- power supply
- electric motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0475—Controlling other elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Electric Motors In General (AREA)
Description
操舵角θは、正負の値により操舵ハンドル11の中立位置に対する右方向および左方向の舵角をそれぞれ表す。本実施形態においては、操舵ハンドル11の中立位置を「0」とし、中立位置に対する右方向への舵角を正の値で示し、中立位置に対する左方向への舵角を負の値で示す。
アシストECU30は、バッテリ71と発電機であるオルタネータ72とからなる電源装置70から電源供給される。バッテリ71としては、定格出力電圧12Vの一般の車載バッテリが用いられる。バッテリ71の電源端子(+端子)73に接続される電源供給元ライン62には、イグニッションスイッチ80が接続される。アシストECU30は、このイグニッションスイッチ80の二次側から電子制御装置40に電源供給する制御電源供給ライン63と、イグニッションスイッチ80の一次側(電源側)から主にモータ駆動回路50に電源供給する駆動電源供給ライン64とを備える。
また、基本アシストトルクTasの算出に関しては、必ずしも車速vと操舵トルクThとの組み合わせから算出する必要はなく、少なくとも操舵状態に応じた検出信号に基づいて行えばよい。
次に、モータ制御部41は、ステップS14において、目標トルクT*を発生させるために必要な目標電流I*を計算する。目標電流I*は、目標トルクT*をトルク定数で除算することにより求められる。
目標指令電圧V*は、例えば、下記式により計算する。
V*=Kp・ΔI+Ki・∫ΔI dt
ここでKpは、PI制御における比例項の制御ゲイン、Kiは、PI制御における積分項の制御ゲインである。
1.電動モータ15を駆動していない状況における制限判定閾値Vonth(=V2)を、駆動時における電圧降下分を考慮して、電動モータ15を駆動しているときの制限判定閾値Vonth(=V1)よりも高い値に設定するため、電動モータ15を駆動して所定の電圧降下が発生しても、その時になって初めて電源電圧Vxが制限判定閾値Vonthを下回ってしまうということが抑制される。つまり、電動モータ15を駆動していない状況であっても、電源装置70の能力が電動モータ15を適正に駆動できないと予想される程度まで低下してきた場合には、その時点から特定車載電気負荷100への電力使用制限を行うことができる。この結果、電動モータ15を駆動制御開始するときの制御遅れを抑制することができる。
Claims (6)
- 電源装置から電力供給されて操舵トルクを発生する電動モータと、
操舵ハンドルの操作状態に応じて上記電動モータの通電量を制御するモータ制御手段と
を備えた操舵装置において、
上記電源装置の電源電圧を検出する電圧検出手段と、
上記電圧検出手段により検出された検出電圧が制限判定閾値よりも下回っているか否かを判断し、上記検出電圧が上記制限判定閾値よりも下回っている場合には、上記電源装置から電源供給を受ける特定車載電気負荷における電力使用を制限させるための制限指令を出力する制限指令手段と、
上記電動モータの電力使用状況に応じて上記制限判定閾値を切り替え、上記電動モータが所定電力以上使用していると判断される場合に比べて、上記電動モータが上記所定電力以上使用していないと判断される場合の制限判定閾値を高く設定する判定閾値切替手段と
を備えたことを特徴とする操舵装置。 - 上記操舵ハンドルの操舵角速度を検出する操舵角速度検出手段を備え、
上記判定閾値切替手段は、上記検出された操舵角速度に基づいて上記電動モータの電力使用状況を推定し、上記操舵角速度が所定角速度以上である場合に比べて、上記操舵角速度が上記所定角速度未満である場合の制限判定閾値を高く設定することを特徴とする請求項1記載の操舵装置。 - 上記操舵ハンドルに働く操舵トルクを検出する操舵トルク検出手段を備え、
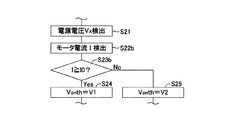
上記判定閾値切替手段は、上記検出された操舵トルクに基づいて上記電動モータの電力使用状況を推定し、上記操舵トルクが所定トルク以上である場合に比べて、上記操舵トルクが上記所定トルク未満である場合の制限判定閾値を高く設定することを特徴とする請求項1記載の操舵装置。 - 上記電動モータに流れる電流を検出するモータ電流検出手段を備え、
上記判定閾値切替手段は、上記検出されたモータ電流に基づいて上記電動モータの電力使用状況を推定し、上記モータ電流が所定電流以上である場合に比べて、上記モータ電流が上記所定電流未満である場合の制限判定閾値を高く設定することを特徴とする請求項1記載の操舵装置。 - 上記制限指令手段により上記制限指令を出力している状態から、上記電圧検出手段により検出された電源電圧が予め設定した解除判定閾値よりも上回った場合に、上記電力使用の制限を解除する制限解除手段を備え、
上記解除判定閾値は、上記制限判定閾値よりも高い値に設定されることを特徴とする請求項1ないし請求項4の何れか一項記載の操舵装置。 - 上記制限指令手段は、上記電圧検出手段により検出された検出電圧が制限判定時間以上継続して上記制限判定閾値よりも下回った場合に上記制限指令を出力し、
上記制限解除手段は、上記電圧検出手段により検出された電源電圧が解除判定時間以上継続して上記解除判定閾値よりも上回った場合に上記電力使用の制限を解除し、
上記解除判定時間は、上記制限判定時間よりも長い時間に設定されることを特徴とする請求項5記載の操舵装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007001912A JP4333743B2 (ja) | 2007-01-10 | 2007-01-10 | 操舵装置 |
| US12/522,603 US8306698B2 (en) | 2007-01-10 | 2007-12-28 | Steering device |
| CN2007800497296A CN101595025B (zh) | 2007-01-10 | 2007-12-28 | 转向装置 |
| PCT/JP2007/075424 WO2008084755A1 (ja) | 2007-01-10 | 2007-12-28 | 操舵装置 |
| DE112007003256.1T DE112007003256B4 (de) | 2007-01-10 | 2007-12-28 | Lenkvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007001912A JP4333743B2 (ja) | 2007-01-10 | 2007-01-10 | 操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008168694A JP2008168694A (ja) | 2008-07-24 |
| JP4333743B2 true JP4333743B2 (ja) | 2009-09-16 |
Family
ID=39608644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007001912A Expired - Fee Related JP4333743B2 (ja) | 2007-01-10 | 2007-01-10 | 操舵装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8306698B2 (ja) |
| JP (1) | JP4333743B2 (ja) |
| CN (1) | CN101595025B (ja) |
| DE (1) | DE112007003256B4 (ja) |
| WO (1) | WO2008084755A1 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4333743B2 (ja) * | 2007-01-10 | 2009-09-16 | トヨタ自動車株式会社 | 操舵装置 |
| JP4952931B2 (ja) * | 2007-08-30 | 2012-06-13 | トヨタ自動車株式会社 | ステアリング装置 |
| JP2010264818A (ja) * | 2009-05-13 | 2010-11-25 | Toyota Motor Corp | 電源制御装置、及び当該装置で用いられる方法 |
| EP2495156B1 (en) * | 2009-10-30 | 2015-10-21 | Toyota Jidosha Kabushiki Kaisha | Device for controlling vehicle travel |
| JP5467852B2 (ja) * | 2009-12-11 | 2014-04-09 | 株式会社ショーワ | 電動パワーステアリング装置、電動パワーステアリング装置の制御方法およびプログラム |
| JP5617455B2 (ja) | 2010-09-06 | 2014-11-05 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2012076693A (ja) * | 2010-10-05 | 2012-04-19 | Jtekt Corp | 電動パワーステアリング装置 |
| WO2012049861A1 (ja) * | 2010-10-15 | 2012-04-19 | 日本精工株式会社 | 電源状態診断方法及び装置 |
| JP5672968B2 (ja) * | 2010-10-29 | 2015-02-18 | 株式会社デンソー | 車両運動制御装置およびそれを有する車両運動制御システム |
| JP5716715B2 (ja) * | 2012-08-10 | 2015-05-13 | 株式会社デンソー | 車両用回転電機 |
| CN103802882B (zh) * | 2012-11-05 | 2018-08-28 | 上海航天汽车机电股份有限公司 | 一种保护电动助力转向系统的方法 |
| JP6115119B2 (ja) * | 2012-12-21 | 2017-04-19 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP5816827B1 (ja) * | 2014-05-14 | 2015-11-18 | パナソニックIpマネジメント株式会社 | グリップセンサ |
| JP6277288B2 (ja) * | 2014-11-28 | 2018-02-07 | 株式会社日立産機システム | 監視装置と監視方法およびそれらを備える制御装置と制御方法 |
| CN104691616B (zh) * | 2015-02-17 | 2017-03-29 | 吉林大学 | 汽车防过度自转向电控限位装置及限位控制方法 |
| DE102016109576A1 (de) * | 2015-06-04 | 2016-12-08 | Ford Global Technologies, Llc | Fahrzeugsicherheits-Strommanagement |
| US10583856B2 (en) * | 2015-07-31 | 2020-03-10 | Nissan Motor Co., Ltd. | Steer-by-wire system, and control method for steer-by-wire system |
| FR3049257B1 (fr) * | 2016-03-24 | 2019-04-26 | Jtekt Europe | Procede de gestion de direction assistee avec reconstruction indirecte de l'information de couple volant |
| KR102699259B1 (ko) * | 2016-11-18 | 2024-08-28 | 현대자동차주식회사 | 차량 및 그 제어 방법 |
| CN106515847B (zh) * | 2016-12-05 | 2018-08-17 | 聊城大学 | 一种拖拉机导航用液压转向控制系统及控制方法 |
| JP6592067B2 (ja) * | 2017-11-29 | 2019-10-16 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP7225567B2 (ja) * | 2018-05-22 | 2023-02-21 | 株式会社ジェイテクト | 角度演算装置 |
| JP7155921B2 (ja) * | 2018-11-16 | 2022-10-19 | 株式会社アイシン | ステアリング装置 |
| JP7123821B2 (ja) * | 2019-01-31 | 2022-08-23 | 日立建機株式会社 | 作業機械 |
| JP7339104B2 (ja) * | 2019-09-26 | 2023-09-05 | 株式会社ジェイテクト | 操舵制御装置 |
| JP7404027B2 (ja) * | 2019-10-24 | 2023-12-25 | 株式会社ジェイテクト | 操舵制御装置 |
| JP7342763B2 (ja) * | 2020-03-30 | 2023-09-12 | トヨタ自動車株式会社 | 車両用ステアリングシステム |
| EP4086148A4 (en) * | 2021-03-12 | 2022-12-21 | NSK Ltd. | Device and method for detecting end positions of turning device, and program |
| JP7502227B2 (ja) * | 2021-04-14 | 2024-06-18 | トヨタ自動車株式会社 | ステアリングシステム |
| DE102023201425A1 (de) * | 2023-02-20 | 2024-08-22 | Volkswagen Aktiengesellschaft | Verfahren zum Lenken eines Kraftfahrzeugs mittels eines Steer-by-Wire-Lenksystems und Steer-by-Wire-Lenksystem |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61172866A (ja) | 1985-01-26 | 1986-08-04 | Mitsubishi Monsanto Chem Co | アルケニルコハク酸無水物の製造方法 |
| JPS61172866U (ja) * | 1985-04-16 | 1986-10-27 | ||
| JPH0615331B2 (ja) * | 1985-06-12 | 1994-03-02 | 株式会社日立製作所 | 電動式パワ−ステアリング装置 |
| JPH0615333B2 (ja) * | 1986-08-11 | 1994-03-02 | 日本精工株式会社 | 電動式パワ−ステアリングの制御装置 |
| JPS6364869A (ja) * | 1986-09-04 | 1988-03-23 | Mazda Motor Corp | 電動パワ−ステアリング装置 |
| JPS63255172A (ja) | 1987-04-10 | 1988-10-21 | Jidosha Kiki Co Ltd | 動力舵取装置 |
| JPH01248990A (ja) * | 1988-03-29 | 1989-10-04 | Aisin Seiki Co Ltd | バッテリ負荷制御装置 |
| JPH06191418A (ja) | 1992-12-24 | 1994-07-12 | Honda Motor Co Ltd | 電気自動車 |
| DE19857916A1 (de) * | 1998-12-15 | 2000-06-21 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Steuerung von elektrischen Verbrauchern in einem Fahrzeug |
| JP3675692B2 (ja) * | 2000-03-17 | 2005-07-27 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP3517833B2 (ja) * | 2000-04-05 | 2004-04-12 | 本田技研工業株式会社 | 可変舵角比操舵装置及び電動パワーステアリング装置を有する車両 |
| ES2250255T3 (es) * | 2000-09-20 | 2006-04-16 | Thyssenkrupp Presta Steertec Gmbh | Nivel de emergencia adicional en caso de averia de los sensores angulares para un sistema de direccion controlada por cable sin conexion de emergencia mecanica/hidraulica y procedimiento para determinar angulo de rotacion del elemento maniobra direccion de una direccion asistida. |
| EP1544698B1 (de) * | 2003-12-19 | 2006-10-18 | Ford Global Technologies, LLC, A subsidary of Ford Motor Company | Vorrichtung und Verfahren zur Kontrolle eines Bordnetzes |
| DE102004038741A1 (de) * | 2004-08-10 | 2006-02-23 | Robert Bosch Gmbh | Verfahren zum Verwalten des Energiebedarfs elektrischer Verbraucher in einem elektrischen Netz |
| JP2006094689A (ja) * | 2004-08-25 | 2006-04-06 | Toyota Motor Corp | 電気自動車およびこの制御方法 |
| DE102004061832B4 (de) * | 2004-12-22 | 2021-06-10 | Bayerische Motoren Werke Aktiengesellschaft | Betriebsverfahren für ein elektromotorisch unterstütztes Fahrzeug-Lenksystem |
| JP4682639B2 (ja) * | 2005-02-15 | 2011-05-11 | 日産自動車株式会社 | 操舵制御装置 |
| JP4629533B2 (ja) * | 2005-08-22 | 2011-02-09 | 日立オートモティブシステムズ株式会社 | 液圧制御装置及びその製造方法 |
| JP4333743B2 (ja) * | 2007-01-10 | 2009-09-16 | トヨタ自動車株式会社 | 操舵装置 |
-
2007
- 2007-01-10 JP JP2007001912A patent/JP4333743B2/ja not_active Expired - Fee Related
- 2007-12-28 WO PCT/JP2007/075424 patent/WO2008084755A1/ja active Application Filing
- 2007-12-28 US US12/522,603 patent/US8306698B2/en not_active Expired - Fee Related
- 2007-12-28 CN CN2007800497296A patent/CN101595025B/zh not_active Expired - Fee Related
- 2007-12-28 DE DE112007003256.1T patent/DE112007003256B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN101595025B (zh) | 2012-04-18 |
| DE112007003256T5 (de) | 2009-12-24 |
| WO2008084755A1 (ja) | 2008-07-17 |
| US8306698B2 (en) | 2012-11-06 |
| US20100121530A1 (en) | 2010-05-13 |
| JP2008168694A (ja) | 2008-07-24 |
| CN101595025A (zh) | 2009-12-02 |
| DE112007003256B4 (de) | 2014-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4333743B2 (ja) | 操舵装置 | |
| KR100997067B1 (ko) | 전동 스티어링 장치 및 전동 스티어링 장치를 제어하는방법 | |
| CN101421148B (zh) | 电动动力转向装置 | |
| JP5233700B2 (ja) | 電動パワーステアリング装置 | |
| US20080004773A1 (en) | Control device for electric power steering apparatus | |
| US11214303B2 (en) | Control device for vehicle | |
| JP4932558B2 (ja) | 電動パワーステアリング装置 | |
| US20200023890A1 (en) | Motor controller | |
| JP5212637B2 (ja) | 電動パワーステアリング装置 | |
| JP4816293B2 (ja) | 電動パワーステアリング装置 | |
| JP4967682B2 (ja) | 電動パワーステアリング装置 | |
| JP2010202062A (ja) | 電動パワーステアリング装置 | |
| JP5057026B2 (ja) | モータ駆動装置 | |
| JP2005104240A (ja) | 電動パワーステアリング制御装置 | |
| JP6459229B2 (ja) | 電動パワーステアリング装置 | |
| JP2015013498A (ja) | 電動パワーステアリング装置 | |
| JP2009046005A (ja) | 電気式動力舵取装置 | |
| JP4692244B2 (ja) | 電力供給装置 | |
| JP4449840B2 (ja) | バッテリ劣化検出装置 | |
| JP2008195246A (ja) | 操舵装置 | |
| JP6870793B1 (ja) | 電動パワーステアリング制御装置 | |
| JP2007283916A (ja) | 電動パワーステアリング制御装置、および方法 | |
| JP5480115B2 (ja) | パワーステアリング装置 | |
| JP5427797B2 (ja) | 電動パワーステアリング装置 | |
| JPWO2021010458A1 (ja) | 電動パワーステアリング制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090602 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090615 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4333743 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120703 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130703 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |