JP6154540B2 - 船舶特性推定装置 - Google Patents
船舶特性推定装置 Download PDFInfo
- Publication number
- JP6154540B2 JP6154540B2 JP2016505098A JP2016505098A JP6154540B2 JP 6154540 B2 JP6154540 B2 JP 6154540B2 JP 2016505098 A JP2016505098 A JP 2016505098A JP 2016505098 A JP2016505098 A JP 2016505098A JP 6154540 B2 JP6154540 B2 JP 6154540B2
- Authority
- JP
- Japan
- Prior art keywords
- ship
- speed
- estimator
- vector
- characteristic estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B71/00—Designing vessels; Predicting their performance
- B63B71/10—Designing vessels; Predicting their performance using computer simulation, e.g. finite element method [FEM] or computational fluid dynamics [CFD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/30—Monitoring properties or operating parameters of vessels in operation for diagnosing, testing or predicting the integrity or performance of vessels
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
- Traffic Control Systems (AREA)
Description
前記船舶の速度ベクトルであるプロペラ推進速度ベクトル、と推定して出力する推定器、を備えている。
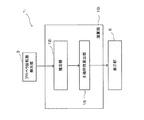
図1は、本発明の実施形態に係る船舶特性推定装置1の構成を示すブロック図である。船舶特性推定装置1は、図1に示すように、GPS信号受信部2と、プロペラ回転数検出部3と、潮流計4と、演算部10と、表示部5と、を備えている。
れて、隠れ層の中間ユニットUMID_1,UMID_2,UMID_3に出力される。隠れ層の各中間ユニットUMID_1,UMID_2,UMID_3は、入力された各値を合計し、その合計値に基づく値に結合係数WM,Oを乗算して出力ユニットUOUT_1,UOUT_2に出力する。出力ユニットUOUT_1,UOUT_2は、入力された各値を合計し、その合計値に基づく値を出力値として、結合係数更新部14に出力する。なお、上記推定器12に入力される値は、必ずしも、プロペラ回転数等、パラメータの値そのもののでなくてもよく、それらのパラメータと一対一の関係にある数値(例えば一例として、回転数と比例して変化する電圧値)等であってもよい。
図5は、推定器12から出力される出力値が、該推定器12の結合係数Wが更新される毎に、対象速度(プロペラ推進速度VPと表層流速度VTとを合成した速度)に収束していく理由を説明するための図である。上述のように、推定器12に記憶される各結合係数Wは、推定器12から随時出力される値と、随時算出される教師信号としての対地速度との誤差が小さくなるように、結合係数更新部14によって更新される。
以上のように、本実施形態に係る船舶特性推定装置1では、プロペラの回転数、潮流計4で計測された表層流速度、及び推定器12によって推定された対象速度に基づいて、プロペラ推進速度を算出している。これにより、プロペラの回転数と、その回転数のときの船舶の対水速度(プロペラ推進速度)との関係性を、比較的容易に把握することができる。
ことができる。
(1)図6は、変形例に係る船舶特性推定装置1aの構成を示すブロック図である。本変形例に係る船舶特性推定装置1aは、図1に示す船舶特性推定装置1と異なり、結合係数更新部14が省略された構成となっている。すなわち、本変形例に係る船舶特性推定装置1aは、学習機能を有さない。また、本変形例に係る船舶特性推定装置1aは、GPS信号受信部2及び対地速度算出部11も、省略された構成となっている。
グにおいて算出された対地速度を用いて、記憶部16に記憶されているテーブルを更新する。具体的には、所定の回転数(例えばR3)及び所定の表層流速度(例えばX2)に算出された対地速度を、R3及びX2で特定されるセルに追加する。この動作が随時、行われることにより、航行中であっても学習データが蓄積され、より正確に対象速度を推定することができる。すなわち、本変形例に係る推定器12bも、学習機能を有している。その結果、より正確にプロペラ推進速度を算出できる。
ΔWi,j n,n-1(t)=ηδi nXj n-1+αΔWi,j n,n-1(t−1)…(1)
mi(t+1)=mi(t)+hi(t)[x(t)−mi(t)]…(2)
ュ状に切られた複数のサブエリアを有するマップにおいて、各学習データが、対地速度に応じてマッピングされている。
たベクトルである。よって、風力推進速度算出部26が、上述のように、対地速度VGから対象速度VSを減算することにより、風力推進速度VWindが算出される。
図24は、推定器12hから出力される出力値が、該推定器12の結合係数Wが更新される毎に、プロペラ推進速度に収束していく理由を説明するための図である。上述のように、推定器12hに記憶される各結合係数Wは、推定器12hから随時出力される値と、随時計測される教師信号としての対水速度との誤差が小さくなるように、結合係数更新部14によって更新される。
くなるように、推定器12hを更新している。これにより、学習機能を備えた推定器12hを構成することができる。しかも、船舶特性推定装置1hでは、正確なプロペラ推進速度を推定するために必要な多量のデータを航行中に蓄積することができるため、学習データ(ある条件時における対地速度のデータ)を予め準備する手間を省くことができる。
加する。この動作が随時、行われることにより、航行中であっても学習データが蓄積され、より正確に対象速度を推定することができる。すなわち、本変形例に係る推定器12jも、学習機能を有している。その結果、より正確にプロペラ推進速度を推定できる。
12,12a,…,12d,12h,…12l 推定器
13 プロペラ推進速度算出部
Claims (17)
- 航行する船舶が位置する対象地点における表層流の速度ベクトルである表層流速度ベクトル、及び、前記対象地点における前記船舶のプロペラの回転数の入力を受け付けるとともに、受け付けられた前記表層流速度ベクトルの値及び前記回転数の値の組み合わせにより特定される各条件に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトルと前記表層流速度ベクトルとが合成された対象速度ベクトル、と推定して出力する推定器と、
前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記表層流速度ベクトルとに基づき、前記プロペラ推進速度ベクトルを算出するプロペラ推進速度算出部と、
を備えていることを特徴とする、船舶特性推定装置。 - 請求項1に記載の船舶特性推定装置において、
前記プロペラ推進速度算出部は、前記推定器から出力された前記出力値から、前記表層流速度ベクトルを減算することにより、前記プロペラ推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。 - 航行する船舶が位置する対象地点における該船舶の対地速度ベクトルを算出する対地速度算出部と、
前記対象地点における表層流の速度ベクトルである表層流速度ベクトル、及び、前記対象地点における前記船舶のプロペラの回転数の入力を受け付けるとともに、受け付けられた前記表層流速度ベクトルの値及び前記回転数の値の組み合わせにより特定される各条件に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトルと前記表層流速度ベクトルとが合成された対象速度ベクトル、と推定して出力する推定器と、
前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記対地速度算出部で算出された前記対地速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトルを算出する風力推進速度算出部と、
を備えていることを特徴とする、船舶特性推定装置。 - 請求項3に記載の船舶特性推定装置において、
前記風力推進速度算出部は、前記対地速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。 - 請求項1から請求項4のいずれか1項に記載の船舶特性推定装置において、
前記推定器は、ニューラルネットワークを用いて構成されていることを特徴とする、船舶特性推定装置。 - 請求項1から請求項4のいずれか1項に記載の船舶特性推定装置において、
前記船舶の対地速度ベクトルを算出する対地速度算出部を更に備え、
前記推定器は、前記各条件に対応する複数の前記対地速度ベクトルの平均値を前記出力値として出力するように、構成されていることを特徴とする、船舶特性推定装置。 - 請求項1から請求項6のいずれか1項に記載の船舶特性推定装置において、
前記船舶の対地速度ベクトルを算出する対地速度算出部と、
前記推定器からの前記出力値と、前記対地速度算出部で算出された前記対地速度ベクトルとを比較するとともに、該出力値と該対地速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、
を更に備えていることを特徴とする、船舶特性推定装置。 - 請求項7に記載の船舶特性推定装置において、
前記推定器は、ニューラルネットワークを用いて構成され、
それぞれに、前記表層流速度ベクトルに関する情報及び前記回転数のいずれかが入力される複数の入力ユニットと、
前記対象速度ベクトルとしての前記出力値を出力する出力ユニットと
を有し、
前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、
前記更新部は、前記出力値と、教師信号としての前記対地速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新することを特徴とする、船舶特性推定装置。 - 請求項1から請求項8のいずれか1項に記載の船舶特性推定装置において、
前記船舶の対地速度ベクトルを算出する対地速度算出部と、
前記船舶に搭載され、GNSS信号を受信するGNSS信号受信部と、を更に備え、
前記対地速度算出部は、前記GNSS信号受信部で受信されたGNSS信号、及び該GNSS信号が受信された時刻に基づき、前記対地速度ベクトルを算出することを特徴とする、船舶特性推定装置。 - 請求項1から請求項9のいずれか1項に記載の船舶特性推定装置において、
前記回転数を検出するプロペラ回転数検出部と、
前記表層流速度ベクトルを計測する潮流計と、を更に備え、
前記推定器には、前記プロペラ回転数検出部で検出された前記回転数と、前記潮流計で計測された前記表層流速度ベクトルと、が入力されることを特徴とする、船舶特性推定装置。 - 航行する船舶が位置する対象地点における前記船舶のプロペラの回転数を受け付けるとともに、受け付けられた前記回転数の各値に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトル、と推定して出力する推定器、を備えていることを特徴とする、船舶特性推定装置。
- 請求項11に記載の船舶特性推定装置において、
前記推定器は、ニューラルネットワークを用いて構成されていることを特徴とする、船舶特性推定装置。 - 請求項11に記載の船舶特性推定装置において、
前記船舶の対水速度ベクトルを算出する対水速度算出部を更に備え、
前記推定器は、前記回転数の検出時における複数の前記対水速度ベクトルであって、前記回転数の各値に対応する複数の前記対水速度ベクトル、の平均値を、前記プロペラ推進速度ベクトルとして出力するように、構成されていることを特徴とする、船舶特性推定装置。 - 請求項11から請求項13のいずれか1項に記載の船舶特性推定装置において、
前記船舶の対水速度ベクトルを算出する対水速度算出部と、
前記推定器からの出力値と、前記対水速度算出部で算出された前記対水速度ベクトルとを比較するとともに、該出力値と該対水速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、
を更に備えていることを特徴とする、船舶特性推定装置。 - 請求項14に記載の船舶特性推定装置において、
前記推定器は、ニューラルネットワークを用いて構成され、
前記回転数が入力される入力ユニットと、
前記出力値を出力する出力ユニットと
を有し、
前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、
前記更新部は、前記出力値と、教師信号としての前記対水速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新することを特徴とする、船舶特性推定装置。 - 請求項11から請求項15のいずれか1項に記載の船舶特性推定装置において、
前記推定器から出力された出力値と、前記対象地点における前記船舶の対水速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトル、を算出する風力推進速度算出部、を更に備えていることを特徴とする、船舶特性推定装置。 - 請求項16に記載の船舶特性推定装置において、
前記風力推進速度算出部は、前記対水速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034479 | 2014-02-25 | ||
| JP2014034479 | 2014-02-25 | ||
| PCT/JP2015/051302 WO2015129338A1 (ja) | 2014-02-25 | 2015-01-20 | 船舶特性推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015129338A1 JPWO2015129338A1 (ja) | 2017-03-30 |
| JP6154540B2 true JP6154540B2 (ja) | 2017-06-28 |
Family
ID=54008667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016505098A Active JP6154540B2 (ja) | 2014-02-25 | 2015-01-20 | 船舶特性推定装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6154540B2 (ja) |
| WO (1) | WO2015129338A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101951142B1 (ko) * | 2018-04-13 | 2019-02-21 | 한국해양과학기술원 | 기계학습을 이용한 선박의 손실 항적 데이터 추정 시스템 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6770471B2 (ja) * | 2017-03-29 | 2020-10-14 | 本田技研工業株式会社 | 小型船舶の操船アシストシステム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10027863C2 (de) * | 2000-06-06 | 2003-07-03 | Eads Deutschland Gmbh | Bahnregler für Fahrzeuge mit einer von einer Anströmung beeinflußten Bahn |
| JP4804032B2 (ja) * | 2005-05-11 | 2011-10-26 | 日本無線株式会社 | 船舶用自動航法援助システム |
| JP2011063064A (ja) * | 2009-09-15 | 2011-03-31 | Nabtesco Corp | 推進ユニット用旋回装置 |
| JP5033210B2 (ja) * | 2010-03-31 | 2012-09-26 | 三井造船株式会社 | 船舶の主機制御システムおよび方法 |
| JP5932362B2 (ja) * | 2012-01-25 | 2016-06-08 | マロール株式会社 | 船体用制御装置、船体用制御プログラムおよび船体の制御方法 |
-
2015
- 2015-01-20 WO PCT/JP2015/051302 patent/WO2015129338A1/ja active Application Filing
- 2015-01-20 JP JP2016505098A patent/JP6154540B2/ja active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101951142B1 (ko) * | 2018-04-13 | 2019-02-21 | 한국해양과학기술원 | 기계학습을 이용한 선박의 손실 항적 데이터 추정 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015129338A1 (ja) | 2015-09-03 |
| JPWO2015129338A1 (ja) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6513677B2 (ja) | 船舶特性推定装置、及び自動操舵装置 | |
| US8761975B2 (en) | Method and apparatus for real-time polars | |
| EP3321631B1 (en) | A inertial and terrain based navigation system | |
| US11041724B2 (en) | Navigation system | |
| JP6340067B2 (ja) | 表層流推定装置、表層流推定システム、海洋モデル推定装置、及び危険度判定装置 | |
| GB2474715A (en) | Aiding navigation of a marine vessel in a tidal region | |
| KR102340167B1 (ko) | 선박의 작동을 최적화하기 위한 방법 및 시스템 | |
| JP2020158072A (ja) | データ同化による船舶性能推定方法及び船舶性能推定システム | |
| JP6154540B2 (ja) | 船舶特性推定装置 | |
| JP2009025042A (ja) | 船舶用目標追尾装置 | |
| JP2019020166A (ja) | 方位推定装置 | |
| WO2022230332A1 (ja) | 船舶監視システム、船舶監視方法、情報処理装置、及びプログラム | |
| JP6864483B2 (ja) | 外乱推測装置 | |
| JP2016114478A (ja) | 流速差推定装置 | |
| JP2006330884A (ja) | 潮流予測システム | |
| KR101554615B1 (ko) | 선박에 미치는 외력크기의 추정방법 및 장치와 이를 이용한 선박 항로 관련 정보 생성장치 | |
| US20250026458A1 (en) | Method for assisting with guiding a surface vessel for towing an underwater device by means of a cable | |
| JP2019090645A (ja) | 対水速度推定装置、対水速度表示装置、潮流測定装置、自動航行装置及び対水速度推定方法 | |
| Kerhascoët et al. | Speedometer fault detection and GNSS fusion using Kalman filters | |
| JP2023183382A (ja) | 外乱推定装置、外乱推定方法および外乱推定プログラム | |
| RU2564786C1 (ru) | Способ управления движением судна с компенсацией медленно меняющихся внешних возмущений и система управления движением судна с компенсацией медленно меняющихся внешних возмущений | |
| JP2011086196A (ja) | 画像表示装置、画像表示方法、および画像表示プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6154540 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |