JP6154540B2 - Ship characteristic estimation device - Google Patents
Ship characteristic estimation device Download PDFInfo
- Publication number
- JP6154540B2 JP6154540B2 JP2016505098A JP2016505098A JP6154540B2 JP 6154540 B2 JP6154540 B2 JP 6154540B2 JP 2016505098 A JP2016505098 A JP 2016505098A JP 2016505098 A JP2016505098 A JP 2016505098A JP 6154540 B2 JP6154540 B2 JP 6154540B2
- Authority
- JP
- Japan
- Prior art keywords
- ship
- speed
- estimator
- vector
- characteristic estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B71/00—Designing vessels; Predicting their performance
- B63B71/10—Designing vessels; Predicting their performance using computer simulation, e.g. finite element method [FEM] or computational fluid dynamics [CFD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B79/00—Monitoring properties or operating parameters of vessels in operation
- B63B79/30—Monitoring properties or operating parameters of vessels in operation for diagnosing, testing or predicting the integrity or performance of vessels
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
- Traffic Control Systems (AREA)
Description
本発明は、船舶の特性を推定する船舶特性推定装置に関する。 The present invention relates to a ship characteristic estimation apparatus that estimates the characteristics of a ship.
従来より、船舶の状態(経時的に変化する船舶の特性)を正確に把握するための様々な試みがなされている。例えば、特許文献1には、船舶に取り付けられた各種センサによって検出された運転情報(船舶の主機の温度、圧力、回転数等)に基づいて、船舶の状態を診断可能なシステムが開示されている。
Conventionally, various attempts have been made to accurately grasp the state of a ship (the characteristics of a ship that changes over time). For example,
ところで、船舶の状態を把握するにあたり、船舶の対水速度(水に対する船舶の速度)に影響を与えるパラメータの値と、各値に対応する実際の船舶の対水速度との関係を把握することは、非常に重要である。この関係性を把握することで、例えば一例として、船舶の航行計画をより正確に立てることができるようになる。しかし、上述した特許文献には、このことについては何ら記載されていない。 By the way, in grasping the state of the ship, grasping the relationship between the value of the parameter that affects the water speed of the ship (the speed of the ship relative to water) and the actual water speed of the ship corresponding to each value. Is very important. By grasping this relationship, for example, it becomes possible to make a ship navigation plan more accurately as an example. However, the above-mentioned patent document does not describe anything about this.
例えば、船舶の対水速度に影響を与えるパラメータとして、船舶のプロペラの回転数、及び船舶に対する風力、が挙げられる。そして、ある船舶において、プロペラの回転数と、該回転数に起因する船舶の対水速度との関係性を把握しようとすると、船舶の対水速度に影響を与える他のパラメータ(風力等)を一定に保った状態で実験を行う必要があり、非常に手間がかかる。これは、船舶に対する風力と、該風力に起因する船舶の対水速度との関係性を把握する場合も、同様である。 For example, the parameters affecting the water velocity of the ship include the rotation speed of the ship's propeller and the wind force with respect to the ship. Then, in a certain ship, when trying to grasp the relationship between the rotation speed of the propeller and the water speed of the ship caused by the rotation speed, other parameters (wind power, etc.) that affect the water speed of the ship are set. It is necessary to conduct experiments while maintaining a constant state, which is very time-consuming. The same applies to the case of grasping the relationship between the wind force for the ship and the water speed of the ship caused by the wind force.
本発明は、上記課題を解決するためのものであり、その目的は、船舶の対水速度に影響を与えるパラメータの値と、該パラメータに起因する船舶の対水速度との関係性を、容易に把握することである。 The present invention is for solving the above-mentioned problems, and its purpose is to facilitate the relationship between the value of a parameter that affects the water speed of a ship and the water speed of the ship caused by the parameter. To figure out.
(1)上記課題を解決するために、この発明のある局面に係る船舶特性推定装置は、航行する船舶が位置する対象地点における表層流の速度ベクトルである表層流速度ベクトル、及び、前記対象地点における前記船舶のプロペラの回転数の入力を受け付けるとともに、受け付けられた前記表層流速度ベクトルの値及び前記回転数の値の組み合わせにより特定される各条件に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトルと前記表層流速度ベクトルとが合成された対象速度ベクトル、と推定して出力する推定器と、前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記表層流速度ベクトルとに基づき、前記プロペラ推進速度ベクトルを算出するプロペラ推進速度算出部と、を備えている。 (1) In order to solve the above-described problem, a ship characteristic estimation device according to an aspect of the present invention includes a surface flow velocity vector that is a surface flow velocity vector at a target point where a navigating ship is located, and the target point. In response to the input of the rotation speed of the propeller of the ship at, the value corresponding to each condition specified by the combination of the value of the surface flow velocity vector received and the value of the rotation speed is caused by the rotation of the propeller A target speed vector obtained by synthesizing a propeller propulsion speed vector that is a speed vector of the ship and the surface flow speed vector, and an estimator that outputs the estimated speed vector, and the target speed vector estimated by the estimator A propeller propulsion speed calculation unit that calculates the propeller propulsion speed vector based on an output value and the surface layer flow velocity vector , And a.
(2)好ましくは、前記プロペラ推進速度算出部は、前記推定器から出力された前記出力値から、前記表層流速度ベクトルを減算することにより、前記プロペラ推進速度ベクトルを算出する。 (2) Preferably, the propeller propulsion speed calculation unit calculates the propeller propulsion speed vector by subtracting the surface layer flow speed vector from the output value output from the estimator.
(3)上記課題を解決するために、この発明のある局面に係る船舶特性推定装置は、航行する船舶が位置する対象地点における該船舶の対地速度ベクトルを算出する対地速度算出部と、前記対象地点における表層流の速度ベクトルである表層流速度ベクトル、及び、前記対象地点における前記船舶のプロペラの回転数の入力を受け付けるとともに、受け付けられた前記表層流速度ベクトルの値及び前記回転数の値の組み合わせにより特定される各条件に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトルと前記表層流速度ベクトルとが合成された対象速度ベクトル、と推定して出力する推定器と、前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記対地速度算出部で算出された前記対地速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトルを算出する風力推進速度算出部と、を備えている。 (3) In order to solve the above-described problem, a ship characteristic estimation device according to an aspect of the present invention includes a ground speed calculation unit that calculates a ground speed vector of a ship at a target point where a navigating ship is located, and the target A surface flow velocity vector that is a surface flow velocity vector at the point, and an input of the rotation speed of the propeller of the ship at the target point, and the values of the received surface flow velocity vector and the rotation speed A value corresponding to each condition specified by the combination is estimated as a target speed vector in which a propeller propulsion speed vector that is a speed vector of the ship due to the rotation of the propeller and the surface flow speed vector are combined. The output estimator, the output value as the target speed vector estimated by the estimator, and the ground speed calculation unit Based on said ground speed vectors, and a, a wind propulsion speed calculation unit for calculating a wind propulsion velocity vector is a velocity vector of the ship caused by wind against the ship in the target point.
なお、対地速度とは、地面に対する速度である。 The ground speed is a speed relative to the ground.
(4)好ましくは、前記風力推進速度算出部は、前記対地速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出する。 (4) Preferably, the wind power propulsion speed calculation unit calculates the wind power propulsion speed vector by subtracting the output value output from the estimator from the ground speed vector.
(5)好ましくは、前記推定器は、ニューラルネットワークを用いて構成されている。 (5) Preferably, the estimator is configured using a neural network.
(6)好ましくは、前記船舶特性推定装置は、前記船舶の対地速度ベクトルを算出する対地速度算出部を更に備え、前記推定器は、前記各条件に対応する複数の前記対地速度ベクトルの平均値を前記出力値として出力するように、構成されている。 (6) Preferably, the ship characteristic estimation device further includes a ground speed calculation unit that calculates a ground speed vector of the ship, and the estimator is an average value of the plurality of ground speed vectors corresponding to the respective conditions. Is output as the output value.
(7)好ましくは、前記船舶特性推定装置は、前記船舶の対地速度ベクトルを算出する対地速度算出部と、前記推定器からの前記出力値と、前記対地速度ベクトルで算出された前記対地速度ベクトルとを比較するとともに、該出力値と該対地速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、を更に備えている。 (7) Preferably, the ship characteristic estimation device includes a ground speed calculation unit that calculates a ground speed vector of the ship, the output value from the estimator, and the ground speed vector calculated from the ground speed vector. And an updating unit that updates the estimator so that an error between the output value and the ground speed vector is reduced.
(8)更に好ましくは、前記推定器は、ニューラルネットワークを用いて構成され、それぞれに、前記表層流速度ベクトルに関する情報及び前記回転数のいずれかが入力される複数の入力ユニットと、前記対象速度ベクトルとしての前記出力値を出力する出力ユニットとを有し、前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、前記更新部は、前記出力値と、教師信号としての前記対地速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新する。 (8) More preferably, the estimator is configured using a neural network, each of which includes a plurality of input units to which any one of the information on the surface flow velocity vector and the rotation speed is input, and the target velocity. An output unit that outputs the output value as a vector, and a value output from the input side unit in the neural network is multiplied by a coupling coefficient and then transmitted to the output side unit, and the update The unit compares the output value with the ground speed vector as a teacher signal, and updates the coupling coefficient so that an error between the output value and the teacher signal is reduced.
(9)好ましくは、前記船舶特性推定装置は、前記船舶の対地速度ベクトルを算出する対地速度算出部と、前記船舶に搭載され、GNSS信号を受信するGNSS信号受信部と、を更に備え、前記対地速度算出部は、前記GNSS信号受信部で受信されたGNSS信号、及び該GNSS信号が受信された時刻に基づき、前記対地速度ベクトルを算出する。 (9) Preferably, the ship characteristic estimation device further includes a ground speed calculation unit that calculates a ground speed vector of the ship, and a GNSS signal reception unit that is mounted on the ship and receives a GNSS signal, The ground speed calculator calculates the ground speed vector based on the GNSS signal received by the GNSS signal receiver and the time when the GNSS signal was received.
(10)好ましくは、前記船舶特性推定装置は、前記回転数を検出するプロペラ回転数検出部と、前記表層流速度ベクトルを計測する潮流計と、を更に備え、前記推定器には、前記プロペラ回転数検出部で検出された前記回転数と、前記潮流計で計測された前記表層流速度ベクトルと、が入力される。 (10) Preferably, the ship characteristic estimation device further includes a propeller rotational speed detection unit that detects the rotational speed, and a tide meter that measures the surface layer flow velocity vector, and the estimator includes the propeller The rotation speed detected by the rotation speed detector and the surface flow velocity vector measured by the tide meter are input.
(11)上記課題を解決するために、この発明のある局面に係る船舶特性推定装置は、航行する船舶が位置する対象地点における前記船舶のプロペラの回転数を受け付けるとともに、受け付けられた前記回転数の各値に対応する値を、前記プロペラの回転に起因する
前記船舶の速度ベクトルであるプロペラ推進速度ベクトル、と推定して出力する推定器、を備えている。(11) In order to solve the above-described problem, a ship characteristic estimation device according to an aspect of the present invention receives the rotation speed of the propeller of the ship at a target point where the navigating ship is located, and the received rotation speed And an estimator for estimating and outputting a propeller propulsion speed vector that is a speed vector of the ship resulting from the rotation of the propeller.
(12)好ましくは、前記推定器は、ニューラルネットワークを用いて構成されている。 (12) Preferably, the estimator is configured using a neural network.
(13)好ましくは、前記船舶特性推定装置は、前記船舶の対水速度ベクトルを算出する対水速度算出部を更に備え、前記推定器は、前記回転数の検出時における複数の前記対水速度ベクトルであって、前記回転数の各値に対応する複数の前記対水速度ベクトル、の平均値を、前記プロペラ推進速度ベクトルとして出力するように、構成されている。 (13) Preferably, the ship characteristic estimation device further includes a water speed calculation unit that calculates a water speed vector of the ship, and the estimator includes a plurality of the water speeds when the rotational speed is detected. An average value of a plurality of the water speed vectors corresponding to each value of the rotation speed is output as the propeller propulsion speed vector.
(14)好ましくは、前記船舶特性推定装置は、前記船舶の対水速度ベクトルを算出する対水速度算出部と、前記推定器からの出力値と、前記対水速度算出部で算出された前記対水速度ベクトルとを比較するとともに、該出力値と該対水速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、を更に備えている。 (14) Preferably, the ship characteristic estimation device is configured to calculate a water speed vector of the ship, a water speed calculation unit that calculates an output value from the estimator, and the water speed calculation unit. An update unit that compares the water velocity vector and updates the estimator so as to reduce an error between the output value and the water velocity vector is further provided.
(15)更に好ましくは、前記推定器は、ニューラルネットワークを用いて構成され、前記回転数が入力される入力ユニットと、前記出力値を出力する出力ユニットとを有し、前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、前記更新部は、前記出力値と、教師信号としての前記対水速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新する。 (15) More preferably, the estimator is configured using a neural network, and includes an input unit to which the rotational speed is input and an output unit to output the output value, and the input side in the neural network The value output from the unit is multiplied by a coupling coefficient and then transmitted to the output unit, and the updating unit compares the output value with the water velocity vector as a teacher signal. The coupling coefficient is updated so that an error between the output value and the teacher signal is reduced.
(16)好ましくは、前記船舶特性推定装置は、前記推定器から出力された出力値と、前記対象地点における前記船舶の対水速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトル、を算出する風力推進速度算出部、を更に備えている。 (16) Preferably, the ship characteristic estimation device is based on an output value output from the estimator and a water velocity vector of the ship at the target point, and is caused by wind force with respect to the ship at the target point. A wind power propulsion speed calculating unit that calculates a wind power propulsion speed vector that is a speed vector of the ship;
(17)更に好ましくは、前記風力推進速度算出部は、前記対水速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出する。 (17) More preferably, the wind power propulsion speed calculation unit calculates the wind power propulsion speed vector by subtracting the output value output from the estimator from the water speed vector.
本発明によれば、船舶の対水速度に影響を与えるパラメータの値と、該パラメータに起因する船舶の対水速度との関係性を、容易に把握できる。 ADVANTAGE OF THE INVENTION According to this invention, the relationship between the value of the parameter which influences the water speed of a ship, and the water speed of the ship resulting from this parameter can be grasped | ascertained easily.
本発明の実施形態に係る船舶特性推定装置1ついて、図を参照して説明する。本発明の実施形態に係る船舶特性推定装置1は、自船(船舶)に搭載されている。船舶特性推定装置1は、船舶の対水速度のうち、該船舶のプロペラの回転に起因する速度を推定する。船舶特性推定装置1では、所定のタイミング毎に所定のパラメータ(本実施形態では、自船のプロペラの回転数、船首方向表層流速度、及び右舷方向表層流速度)が自動で求められるとともに、各パラメータの値の組み合わせにより特定される条件毎に、自船のプロペラの回転に起因する速度が算出される。
A ship
なお、以下では、船舶の対水速度のうち、該船舶のプロペラの回転に起因する速度を、プロペラ推進速度と称する。 In the following, the speed resulting from the rotation of the propeller of the ship out of the water speed of the ship is referred to as the propeller propulsion speed.
[全体構成]
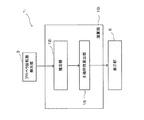
図1は、本発明の実施形態に係る船舶特性推定装置1の構成を示すブロック図である。船舶特性推定装置1は、図1に示すように、GPS信号受信部2と、プロペラ回転数検出部3と、潮流計4と、演算部10と、表示部5と、を備えている。[overall structure]
FIG. 1 is a block diagram showing a configuration of a ship
GPS信号受信部2は、航法衛星(図示省略)から送信される航法信号(GNSS信号)としてのGPS信号を受信するための、GNSS信号受信部として設けられている。GPS信号受信部2は、例えば、GPSアンテナによって構成されている。GPS信号受信部2で受信されたGPS信号(すなわち、自船の位置情報)は、該GPS信号が受信された時刻とともに、演算部10に通知される。
The GPS
なお、本実施形態では、GNSS信号受信部としてGPS信号受信部2を用いているが、これに限らず、その他のGNSSシステムにおいて用いられる受信部を用いてもよい。ここで、GNSSとは、全地球航法衛星システム(GNSS;Global Navigation Satellite Systems)の略語である。このGNSSは、米国により運営される「GPS」、欧州により運営される「GALILEO」及びロシアにより運営される「GLONASS」等の総称である。
In this embodiment, the GPS
プロペラ回転数検出部3は、自船の推力を発生させるためのプロペラの単位時間当たりの回転数を検出するためのものであって、例えば、回転数を検出可能なセンサによって構成されている。プロペラ回転数検出部3で検出された回転数は、演算部10に通知される。
The propeller rotational
潮流計4は、自船位置における海水の表層部分の流速、具体的には、船首方向表層流速度、及び右舷方向表層流速度を計測するためのものであって、例えば自船の船底において水中に露出するように装備される。潮流計4では、自船位置における比較的浅い部分の表層流が計測される。潮流計4で計測された船首方向表層流速度及び右舷方向表層流速度は、演算部10に通知される。
The
演算部10は、GPS信号受信部2、プロペラ回転数検出部3、及び潮流計4から通知された各種情報に基づき、所定のタイミング毎に、自船位置(対象地点)におけるプロペラ推進速度を推定する。演算部10は、対地速度算出部11と、推定器12と、プロペラ推進速度算出部13と、結合係数更新部14と、主機特性算出部15を備えている。
The
対地速度算出部11は、GPS信号受信部2から通知される自船の位置情報、及びその自船位置情報が取得された時刻に基づき、自船の対地速度(対地速度ベクトル)を算出する。具体的には、対地速度算出部11は、少なくとも2つのタイミングにおける自船位置、及び各自船位置の位置情報が取得された時刻に基づき、自船の対地速度を算出する。対地速度算出部11は、このようにして算出した対地速度を、結合係数更新部14に通知する。
The
推定器12は、自船位置におけるプロペラ推進速度と表層流速度とが合成された速度(以下、対象速度と称する)を推定するように構成されている。本実施形態では、推定器12には、プロペラ回転数検出部3で検出された自船のプロペラの回転数、及び潮流計で計測された自船位置における船首方向表層流速度及び右舷方向表層流速度、が入力される。推定器12は、これらの入力値の組み合わせによって特定される条件(ある回転数、ある船首方向表層流速度、及びある右舷方向表層流速度、の組み合わせで特定される条件)に対応する値を、対象速度(対象速度ベクトル)として、プロペラ推進速度算出部13に出力する。
The
図2は、推定器12の構成の一例を模式的に示す図である。本実施形態では、推定器12は、一般的に知られているニューラルネットワークを用いて構成されている。具体的には、推定器12は、入力層を構成する複数の入力ユニットUIN_1,UIN_2,UIN_3と、隠れ層を構成する複数の中間ユニットUMID_1,UMID_2,UMID_3と、出力層を構成する出力ユニットUOUT_1,UOUT_2と、を備えている。なお、図2に示す推定器12の構成はあくまで一例であり、各層におけるユニット数、隠れ層の層数については、図2に示す限りでない。FIG. 2 is a diagram schematically illustrating an example of the configuration of the
推定器12では、各入力ユニットUIN_1,UIN_2,UIN_3に各入力値(プロペラの回転数等)が入力されると、それらの入力値に対して結合係数WI,Mが乗算さ
れて、隠れ層の中間ユニットUMID_1,UMID_2,UMID_3に出力される。隠れ層の各中間ユニットUMID_1,UMID_2,UMID_3は、入力された各値を合計し、その合計値に基づく値に結合係数WM,Oを乗算して出力ユニットUOUT_1,UOUT_2に出力する。出力ユニットUOUT_1,UOUT_2は、入力された各値を合計し、その合計値に基づく値を出力値として、結合係数更新部14に出力する。なお、上記推定器12に入力される値は、必ずしも、プロペラ回転数等、パラメータの値そのもののでなくてもよく、それらのパラメータと一対一の関係にある数値(例えば一例として、回転数と比例して変化する電圧値)等であってもよい。The
推定器12では、初期状態においては、各結合係数Wに適当な初期値が設定されている。そして、各結合係数Wは、結合係数更新部14によって随時、更新される。具体的には、各結合係数Wは、推定器12から出力される出力値と、潮流計4で計測された表層流速度(教師信号)との誤差が少なくなるように、結合係数更新部14によって更新される。これにより、推定器12から出力される出力値は、詳しくは後述するが、結合係数Wが更新される毎に、対象速度に収束していく。
In the
プロペラ推進速度算出部13は、推定器12から出力された対象速度としての出力値、及び潮流計4で計測された表層流速度に基づき、プロペラ推進速度を算出する。具体的には、プロペラ推進速度算出部13は、対象速度から表層流速度を減算することにより、プロペラ推進速度を算出する。
The propeller propulsion
図3は、対象速度ベクトルVSと、プロペラ推進速度ベクトルVPと、表層流速度ベクトルVTとの関係を示すベクトル図である。上述のように、対象速度ベクトルVSは、プロペラ推進速度ベクトルVPと、表層流速度ベクトルVTとを合成したベクトルである。よって、プロペラ推進速度算出部13が、上述のように、対象速度ベクトルVSから表層流速度ベクトルVTを減算することにより、プロペラ推進速度ベクトルVPが算出される。FIG. 3 is a vector diagram showing a relationship among the target velocity vector V S , the propeller propulsion velocity vector VP, and the surface layer flow velocity vector V T. As described above, the target velocity vector V S is a vector obtained by synthesizing the propeller propulsion velocity vector VP and the surface flow velocity vector V T. Thus, the propelling
結合係数更新部14は、推定器12から出力される出力値と、対地速度算出部11で算出された対地速度(教師信号)との誤差が少なくなるように、推定器12の結合係数Wを更新する。結合係数更新部14は、例えば一例として、バックプロパゲーション(誤差逆伝播法)を用いて、結合係数Wを更新する。
The coupling
主機特性算出部15は、船舶の主機(船舶において推力を発生させるための機構部分)の特性を算出するためのものである。本実施形態では、主機特性算出部15は、プロペラの回転数に対するプロペラ推進速度を算出する。主機特性算出部15は、プロペラ推進速度算出部13で算出された、プロペラ回転数毎のプロペラ推進速度に基づき、例えば一例として回帰分析を用いることにより、主機特性を求める。
The main engine
図4は、表示部5に表示される主機特性の一例を示す図である。表示部5には、図4の実線に示すような主機特性が表示される。
FIG. 4 is a diagram illustrating an example of main machine characteristics displayed on the
一般的に、主機特性は、新艇のトライアル時又は修理直後において、理想的な特性、具体的には、プロペラの回転数に対するプロペラ推進速度が速くなるような特性となる(図4破線参照)。よって、例えば、新艇のトライアル時の主機特性と、現時点での自船の主機特性とを比較することにより、エンジンの劣化状態、船体表面の汚損状態等を推測することができる。ユーザは、これらの状態を知ることにより、より正確な運航計画、異常点検の必要性等を判断することができる。 In general, the main engine characteristics are ideal characteristics when a new boat is trialed or immediately after repair, and more specifically, characteristics such that the propeller propulsion speed with respect to the rotation speed of the propeller is increased (see the broken line in FIG. 4). . Therefore, for example, by comparing the main engine characteristics at the time of trial of a new boat with the main engine characteristics of the current ship, it is possible to infer the deterioration state of the engine, the fouling state of the hull surface, and the like. By knowing these states, the user can determine a more accurate operation plan, necessity of abnormality inspection, and the like.
[推定器から出力される出力値について]
図5は、推定器12から出力される出力値が、該推定器12の結合係数Wが更新される毎に、対象速度(プロペラ推進速度VPと表層流速度VTとを合成した速度)に収束していく理由を説明するための図である。上述のように、推定器12に記憶される各結合係数Wは、推定器12から随時出力される値と、随時算出される教師信号としての対地速度との誤差が小さくなるように、結合係数更新部14によって更新される。[Output value output from the estimator]
5, the output value output from the
風速は、海域、時刻、気象条件等に起因して、その大きさ及び向きが異なる。よって、プロペラの回転数及び表層流速度が同じ場合における対地速度には、あらゆる大きさ及び向きの風速成分が含まれていると考えられる。よって、これらを平均化すると、風速成分が互いに打ち消し合い、プロペラ推進速度及び表層流速度を合成した速度成分、すなわち対象速度成分が残る。すなわち、推定器12の結合係数Wが、上述のように、推定器12の出力値と対地速度との誤差が小さくなるように更新されていくと、対地速度に含まれる風速成分の影響が徐々に小さくなるため、推定器12の出力値は、上述した対象速度成分に収束していく。従って、学習が十分進んだ段階においては(すなわち、結合係数が十分な回数、更新された段階においては)、推定器12からの出力値を、対象速度と推定することができる。
The wind speed varies in size and direction due to the sea area, time, weather conditions, and the like. Therefore, it is considered that the ground speed in the case where the rotation speed of the propeller and the surface flow velocity are the same includes wind speed components of all magnitudes and directions. Therefore, when these are averaged, the wind speed components cancel each other, and the speed component obtained by synthesizing the propeller propulsion speed and the surface layer flow speed, that is, the target speed component remains. That is, when the coupling coefficient W of the
[効果]
以上のように、本実施形態に係る船舶特性推定装置1では、プロペラの回転数、潮流計4で計測された表層流速度、及び推定器12によって推定された対象速度に基づいて、プロペラ推進速度を算出している。これにより、プロペラの回転数と、その回転数のときの船舶の対水速度(プロペラ推進速度)との関係性を、比較的容易に把握することができる。[effect]
As described above, in the ship
従って、本実施形態に係る船舶特性推定装置1によれば、船舶の対水速度に影響を与えるパラメータであるプロペラの回転数と、それに対応する船舶の対水速度(プロペラ推進速度)との関係性、すなわち主機特性を、容易に把握できる。
Therefore, according to the ship
また、船舶特性推定装置1では、推定器12を、ニューラルネットワークを用いて構成している。これにより、対象速度を出力可能な推定器12を適切に構成することができる。
Moreover, in the ship
また、船舶特性推定装置1では、推定器12の出力値と、対地速度算出部11で算出された対地速度との誤差が少なくなるように、推定器12を更新している。これにより、学習機能を備えた推定器12を構成することができる。しかも、船舶特性推定装置1では、正確な対象速度を推定するために必要な多量のデータを航行中に蓄積することができるため、学習データ(ある条件時における対地速度のデータ)を予め準備する手間を省くことができる。
Moreover, in the ship
また、船舶特性推定装置1では、推定器12の出力値と、対地速度算出部11で算出された対地速度との誤差が少なくなるように、推定器12に記憶された結合係数Wを更新している。これにより、推定器12を適切に更新することができる。
Further, the ship
また、船舶特性推定装置1では、対象速度から表層流速度を減算することにより、プロペラ推進速度を算出している。これにより、プロペラ推進速度を、更に容易に算出することができる。
Moreover, in the ship
また、船舶特性推定装置1では、広く普及しているGNSS、特にGPSを利用して、対地速度を正確に算出することができる。しかも、一般的な船舶には、GPSアンテナが搭載されている場合が多いため、新たな装置等を導入することなく、対地速度を算出する
ことができる。Moreover, in the ship
また、船舶特性推定装置1では、自船に搭載されたプロペラ回転数検出部3及び潮流計4により、プロペラの回転数、及び表層流速度を検出している。よって、船舶特性推定装置1では、一般的な機器として普及しているプロペラ回転数検出部3及び潮流計4を利用して、プロペラ推進速度を推定することができる。
Moreover, in the ship
以上、本発明の実施形態について説明したが、本発明はこれらに限定されるものではなく、本発明の趣旨を逸脱しない限りにおいて種々の変更が可能である。 As mentioned above, although embodiment of this invention was described, this invention is not limited to these, A various change is possible unless it deviates from the meaning of this invention.
[変形例]
(1)図6は、変形例に係る船舶特性推定装置1aの構成を示すブロック図である。本変形例に係る船舶特性推定装置1aは、図1に示す船舶特性推定装置1と異なり、結合係数更新部14が省略された構成となっている。すなわち、本変形例に係る船舶特性推定装置1aは、学習機能を有さない。また、本変形例に係る船舶特性推定装置1aは、GPS信号受信部2及び対地速度算出部11も、省略された構成となっている。[Modification]
(1) FIG. 6 is a block diagram showing a configuration of a ship characteristic estimation device 1a according to a modification. Unlike the ship
本変形例に係る船舶特性推定装置1aでは、予め取得された多くの学習データ(ある条件時における対地速度のデータ)に基づいて結合係数Wが決定された推定器12aによって、対象速度としての出力値が出力される。このような構成であっても、上記実施形態の場合と同様、プロペラ推進速度を容易に算出することができる。
In the ship characteristic estimation apparatus 1a according to the present modification, the output as the target speed is obtained by the
(2)図7は、変形例に係る船舶特性推定装置1bの構成を示すブロック図である。本変形例に係る船舶特性推定装置1bは、上記実施形態に係る船舶特性推定装置1と比べて、推定器12bの構成が大きく異なっている。具体的には、推定器12bが、ニューラルネットワークを用いて構成されておらず、記憶部16及び更新部17を備えた構成となっている。
(2) FIG. 7 is a block diagram showing a configuration of a ship
図8は、図7に示す推定器12bについて詳細に説明するための図である。
FIG. 8 is a diagram for explaining the
記憶部16には、図8に示すように、マトリックス状のテーブルが記憶されている。このテーブルには、表層流速度の各値(X1,X2,X3,…)及び回転数の各値(R1,R2,R3,…)の組み合わせによって特定される各条件(テーブルの各セルに対応)のときに算出された、対地速度が記憶されている。図8では、1つの対地速度の値が、1つの丸印で示されている。すなわち、記憶部16には、例えば、表層流速度がX1であり且つ回転数がR1のときに算出された対地速度の値が、5つ、記憶されている。
As shown in FIG. 8, the
推定器12bに、プロペラ回転数検出部3で検出された回転数(例えばR2)と、潮流計4で計測された表層流速度(例えばX3)と、が入力されると、推定器12bは、回転数がR2であり且つ表層流速度がX3であるセルに含まれる対地速度(図8の場合、11個)の平均値を算出する。そして、推定器12bは、その平均値を出力値として出力する。
When the rotational speed (for example, R2) detected by the propeller rotational
図5を用いて上述したように、ある条件(ある回転数及びある表層流速度の組み合わせで特定される条件)における対地速度を平均化すると、対地速度に含まれる風速成分が互いに相殺されるため、その平均値は、対象速度(プロペラ推進速度と表層流速度とを合成した速度)に近い値になる。従って、本変形例に係る推定器12bによっても、適切に対象速度を推定することができる。
As described above with reference to FIG. 5, if the ground speed under a certain condition (a condition specified by a combination of a certain rotational speed and a certain surface layer flow speed) is averaged, the wind speed components included in the ground speed cancel each other. The average value is close to the target speed (the speed obtained by combining the propeller propulsion speed and the surface layer flow speed). Therefore, the target speed can be appropriately estimated also by the
更新部17は、推定器12bに入力された回転数及び表層流速度が検出されたタイミン
グにおいて算出された対地速度を用いて、記憶部16に記憶されているテーブルを更新する。具体的には、所定の回転数(例えばR3)及び所定の表層流速度(例えばX2)に算出された対地速度を、R3及びX2で特定されるセルに追加する。この動作が随時、行われることにより、航行中であっても学習データが蓄積され、より正確に対象速度を推定することができる。すなわち、本変形例に係る推定器12bも、学習機能を有している。その結果、より正確にプロペラ推進速度を算出できる。The updating
なお、本変形例において更新部17、GPS信号受信部2、及び対地速度算出部11を省略した構成とすることにより、学習機能を有さない船舶特性推定装置1cを構成することができる(図9参照)。この場合、記憶部16に、予め所得した複数の学習データ(図8における丸印1つに対応するデータ)を記憶させておく必要がある。
In addition, the ship characteristic estimation apparatus 1c which does not have a learning function can be comprised by setting it as the structure which abbreviate | omitted the
(3)図10は、変形例に係る船舶特性推定装置1dの構成を示すブロック図である。本変形例に係る船舶特性推定装置1dは、学習係数設定処理部20を更に備えている。
(3) FIG. 10 is a block diagram showing a configuration of a ship
推定器12dは、上記実施形態の場合と同様、ニューラルネットワークを用いて構成されるとともに、いわゆる教師あり学習によって結合係数が随時、更新されるように構成されている。船舶特性推定装置1dでは、該推定器12dからの出力値と教師信号(対地速度)との誤差が計算される。そして、船舶特性推定装置1dは、その誤差を学習信号として出力層側のユニットから入力層側のユニットへ伝播させながら、結合係数Wを更新していく。結合係数の修正量は、次の(1)式で与えられる。
As in the case of the above embodiment, the
[数1]
ΔWi,j n,n-1(t)=ηδi nXj n-1+αΔWi,j n,n-1(t−1)…(1)[Equation 1]
ΔW i, j n, n−1 (t) = ηδ i n X j n−1 + αΔW i, j n, n−1 (t−1) (1)
式(1)において、ΔWi,j n,n-1(t)は、n−1層のユニットjとn層のユニットiの間の結合の重みに対する修正量、ηは学習係数、δi nはn層目のユニットiからn−1層の各ユニットへ戻される学習信号、Xj n-1はn−1層のユニットjの出力値、αは安定化係数、ΔWi,j n,n-1(t−1)は前回の修正量、を示す。なお、n−1層目の層は、n層目の層よりも1つ、入力側の層である。In Expression (1), ΔW i, j n, n−1 (t) is a correction amount for the weight of the coupling between the unit j of the n−1 layer and the unit i of the n layer, η is a learning coefficient, and δ i n is a learning signal returned from the unit i of the nth layer to each unit of the n−1 layer, X j n−1 is an output value of the unit j of the n−1 layer, α is a stabilization coefficient, and ΔW i, j n , n-1 (t-1) indicates the previous correction amount. Note that the n-1th layer is one layer on the input side than the nth layer.
図11は、学習係数設定処理部20の構成を示すブロック図である。学習係数設定処理部20は、式(1)における学習係数を随時、設定するためのものである。学習係数設定処理部20は、図11に示すように、記憶部21と、SOM更新部22と、カウント部23と、学習係数算出部24と、学習係数設定部25と、を有している。
FIG. 11 is a block diagram illustrating a configuration of the learning coefficient
図12は、記憶部21に記憶されるテーブルと、そのテーブルの各セルに対応して記憶される自己組織化マップSOMと、を模式的に示す図である。図12に示すように、記憶部21には、所定のプロペラ回転数毎及び所定の表層流速度毎にメッシュ状に切られたテーブルが記憶されている。このテーブルの各セルには、対応する自己組織化マップSOMが記憶されている。本変形例の各自己組織化マップSOMは、n×n個のユニットで構成された2次元SOMである。各ユニットには、入力ベクトルと同次元の参照ベクトルが記憶されている。初期状態(学習が行われていない状態)では、各ユニットには、適当な参照ベクトルが設定されている。
FIG. 12 is a diagram schematically showing a table stored in the
SOM更新部22は、入力ベクトル(所定のタイミング毎に入力されるプロペラの回転数、表層流速度、対地速度、等で構成されるベクトル)に応じて、SOMを更新する。具体的には、SOM更新部22は、入力された回転数及び表層流速度が含まれるセルに記憶されるSOMを、以下のようにして更新する。
The
具体的には、SOM更新部22は、入力ベクトルとのユークリッド距離が最も近いユニットを勝者ユニットとし、その勝者ユニットに記憶される参照ベクトルと、勝者ユニットの周囲のユニットに記憶される参照ベクトルとを、次の(2)式に基づいて、更新する。
Specifically, the
[数2]
mi(t+1)=mi(t)+hi(t)[x(t)−mi(t)]…(2)[Equation 2]
m i (t + 1) = m i (t) + h i (t) [x (t) −m i (t)] (2)
但し、miは参照ベクトル、x(t)は入力ベクトル、hiは、c・exp(−dis2/α2)で表される近傍関数である。近傍関数において、cは学習率係数、dis=|x−mc|である。ここで、mcは、x(t)とのユークリッド距離を最小にする参照ベクトルである。Here, m i is a reference vector, x (t) is an input vector, and h i is a neighborhood function represented by c · exp (−dis 2 / α 2 ). In the neighborhood function, c is a learning rate coefficient and dis = | x−m c |. Here, mc is a reference vector that minimizes the Euclidean distance from x (t).
SOM更新部22は、随時入力される入力ベクトルによって、上述した式(2)を用いて、自己組織化マップSOMを随時、更新する。
The
カウント部23は、入力ベクトルとの差(ユークリッド距離)がある閾値以下となる参照ベクトルを有するユニットの数をカウントする。
The
学習係数算出部24は、カウント部23でカウントされた値の逆数をとり、その値を学習係数として算出する。すなわち、カウント値が多い場合(類似する入力データが多い場合)には学習係数が小さくなり、カウント値が少ない場合(類似する入力データが少ない場合)には学習係数が大きくなる。
The learning
学習係数設定部25は、学習係数算出部24で算出された値を、推定器12dに通知し、(1)式における学習係数ηとして設定する。推定器12dは、その学習係数ηを用いて、(1)式に基づいて結合係数を更新した後、更新された結合係数に基づいて、対水速度ベクトルを算出する。
The learning
本変形例によれば、類似する学習データ(入力ベクトル)が多数、蓄積されている場合には、学習係数が小さくなる。この場合、上述した式(1)より明らかなように、結合係数の修正量ΔWi,j n,n-1(t)が小さくなる。一方、類似する学習データが蓄積されていない、又は少ししか蓄積されていない場合には、学習係数が大きくなる。この場合、式(1)より明らかなように、結合係数の修正量が大きくなる。これにより、本変形例によれば、類似する学習データが多く蓄積されることに起因する、推定器からの出力値の偏りを抑制することができる。According to this modification, when a large number of similar learning data (input vectors) are accumulated, the learning coefficient becomes small. In this case, as is clear from the above-described expression (1), the correction amount ΔW i, j n, n−1 (t) of the coupling coefficient becomes small. On the other hand, when similar learning data is not accumulated or only a little is accumulated, the learning coefficient is increased. In this case, as is clear from the equation (1), the correction amount of the coupling coefficient becomes large. Thereby, according to this modification, the bias | inclination of the output value from an estimator resulting from accumulating many similar learning data can be suppressed.
(4)図13は、変形例に係る船舶特性推定装置の学習係数設定処理部40の構成を示すブロック図である。本変形例に係る学習係数設定処理部40は、上述した変形例の学習係数設定処理部20の場合と同様、ニューラルネットワークを用いて構成された推定器で用いられる式(1)の学習係数ηを設定するためのものである。しかし、本変形例に係る学習係数設定処理部40は、上述した変形例の学習係数設定処理部20と構成が異なる。本変形例の学習係数設定処理部40は、図13に示すように、記憶部41と、学習係数算出部42と、学習係数設定部43と、を有している。
(4) FIG. 13 is a block diagram illustrating a configuration of the learning coefficient
図14は、記憶部41に記憶されるテーブルと、そのテーブルの各セル(各エリア)に対応して記憶される学習データとを示す図である。図14に示すように、記憶部41には、上述した変形例の場合と同様、所定のプロペラ回転数毎及び所定の表層流速度毎にメッシュ状に切られたテーブルが記憶されている。本変形例では、各エリアに記憶されている学習データが、各学習データの対地速度に応じてマッピングされている。具体的には、図14に示すように、所定の船首方向対地速度毎、及び所定の右舷方向対地速度毎にメッシ
ュ状に切られた複数のサブエリアを有するマップにおいて、各学習データが、対地速度に応じてマッピングされている。FIG. 14 is a diagram showing a table stored in the
学習係数算出部42は、直近で入力された学習データが含まれるサブエリアに記憶される学習データの数(図14の場合は4)を、該サブエリアが含まれるエリアの全サブエリアのうち最も学習データの数が多いサブエリアに記憶される学習データの数(図14の場合はサブエリアAの10)で除算した値の逆数を正規化した値を、学習係数として設定する。そして、学習係数設定部43は、上記変形例の学習係数設定部25と同様、学習係数算出部42で設定された学習係数を推定器に通知し、(1)式における学習係数ηとして設定する。このような構成であっても、学習係数を適切に設定することができる。
The learning
(5)図15は、変形例に係る船舶特性推定装置1eの構成を示すブロック図である。本変形例では、船舶特性推定装置1eの一部を構成するGPS信号受信部2等と、演算部10eとが、別々の場所に搭載されている。具体的には、本変形例では、GPS信号受信部2と、プロペラ回転数検出部3と、潮流計4とが、自船に搭載され、演算部10eが、例えば陸地に設置されたデータセンタ30に設けられている。そして、本変形例に係る船舶特性推定装置1eは、自船に搭載された送信部19a及び受信部19bを備えている。
(5) FIG. 15 is a block diagram showing a configuration of a ship
送信部19aは、GPS信号受信部2、プロペラ回転数検出部3、及び潮流計4で検出された各種データを、アンテナを介してデータセンタ30に送信する。データセンタ30の演算部10hでは、当該各種データに基づいて、上記実施形態の場合と同様、プロペラ推進速度を算出する。演算部10eは、プロペラ推進速度を算出し、これらをデータベース部31に保存する。受信部19bは、データベース部31に保存されたプロペラ推進速度を受信する。このデータは、表示部5に表示される。
The
本変形例では、上記実施形態の場合と異なり、比較的計算負荷の大きい演算部を、自船とは異なる場所に設けることができる。これにより、自船に演算部を搭載しなくても、自船位置における表層流速度を推定することができる。 In this modification, unlike the case of the above-described embodiment, a calculation unit with a relatively large calculation load can be provided at a place different from the own ship. Thereby, even if it does not mount a calculating part in own ship, the surface layer flow velocity in the own ship position can be estimated.
(6)また、上述した実施形態及び各変形例において、学習データの蓄積が十分でない場合に、学習データを補完することもできる。 (6) In the above-described embodiment and each modification, the learning data can be supplemented when the learning data is not sufficiently accumulated.
図16は、学習データの補完について説明するための模式図である。例えば、ある条件下で航行している船に対して、左舷後方45度からの表層流が作用している場合と、右舷後方45度からの表層流が作用している場合(表層流の大きさは互いに同じ)とでは、その進行方向が左右対称になると予想される。よって、図16を参照して、例えば、プロペラ回転数が所定の回転数、表層流の向きが左舷後方45度、表層流速度が所定の大きさ、のときに、対地速度がVGであった場合、その学習データに基づいて、以下のようにデータを補完することができる。具体的には、プロペラ回転数及び表層流速度の大きさは上記学習データと同じであり、表層流の向きが右舷後方45度、のときの学習データとして、左右反転させたベクトルV'Gを補完することができる。このように学習データを補完することにより、例えば学習データの蓄積が不十分な初期段階であっても、精度よくプロペラ推進速度を推定することができる。FIG. 16 is a schematic diagram for explaining complementation of learning data. For example, for a ship navigating under certain conditions, a surface flow from 45 degrees on the port side and a surface flow from 45 degrees on the starboard side (the magnitude of the surface flow) Is the same as each other), the traveling direction is expected to be symmetrical. Thus, with reference to FIG. 16, for example, propeller speed predetermined rotational speed, orientation port rear 45 degree surface current, when the surface layer flow speed is a predetermined magnitude, the ground speed is met V G In such a case, the data can be supplemented as follows based on the learning data. Specifically, the size of the propeller speed and surface velocity is the same as the learning data, orientation starboard rear 45 degree surface current, as learning data when the, vector V 'G obtained by mirror-inverting Can be complemented. By supplementing the learning data in this way, the propeller propulsion speed can be accurately estimated even in the initial stage where the learning data is not sufficiently accumulated, for example.
(7)上記実施形態では、潮流計4を用いて表層流速度を計測したが、これに限らず、潮流計4とは異なる機構の表層流推定装置等によって推定してもよい。
(7) In the above-described embodiment, the surface layer flow velocity is measured using the
(8)上記実施形態では、表示部5に主機特性グラフを表示することにより、現時点における主機の状態をユーザに通知したが、これに限らない。具体的には、主機の劣化状態を示す指標を、表示部において表示することもできる。
(8) In the above embodiment, the main unit characteristic graph is displayed on the
図17は、表示部に表示される回転速度計6の一例を示す図である。回転速度計6には、回転速度の数値が記された目盛部6aが設けられていて、指示針6bがプロペラの回転速度を指し示すように構成されている。
FIG. 17 is a diagram illustrating an example of the tachometer 6 displayed on the display unit. The tachometer 6 is provided with a
そして、本実施形態では、指示針6bの色が、主機の劣化状態を示す指標として機能する。具体的には、主機特性が劣化していない状態では、指示針6bの色が、図17(A)に示すように、例えば青色(ハッチングなし)で表示される。また、主機特性がやや劣化した状態では、指示針6bの色が、図17(B)に示すように、例えば黄色(間隔が広いハッチング)で表示される。そして、主機特性が大きく劣化し修理が必要な状態になると、指示針6bの色が、図17(C)に示すように、例えば赤色(間隔が狭いハッチング)で表示される。これにより、ユーザは、主機特性の劣化を視覚的に容易に認識することができる。
In the present embodiment, the color of the
上述した主機特性の劣化状態は、例えば一例として、新艇のトライアル時又は修理直後の主機の所定回転数時におけるプロペラ推進速度と、現時点での主機の所定回転数時におけるプロペラ推進速度との比に基づいて、判定することができる。 For example, the deterioration state of the main engine characteristics described above is, for example, a ratio between the propeller propulsion speed at the predetermined speed of the main engine at the time of the predetermined speed of the main engine at the time of the predetermined speed of the main engine at the time of trial of a new boat or immediately after repair. Can be determined based on
なお、主機の劣化状態を示す指標としては、上述のような色に限らず、例えば、劣化状態に対応する模様とすることもでき、或いは、劣化状態に応じて回転速度計6の明度が徐々に暗くなるようにすることもできる。 The index indicating the deterioration state of the main engine is not limited to the color as described above. For example, a pattern corresponding to the deterioration state can be used, or the brightness of the tachometer 6 is gradually increased according to the deterioration state. It can also be darkened.
また、図17では、主機の劣化状態に応じて、指示針6bの色を変化させたが、これに限らず、例えば主機の回転速度がデジタル表示される場合には、デジタル表示された数字の色を、主機の劣化状態に応じて変化させてもよい。その他、主機の劣化状態を示す指標であれば、その劣化状態を示すアナウンス等の文字等、どのようなものであってもよい。
In FIG. 17, the color of the
(9)図18は、変形例に係る船舶特性推定装置1fの構成を示すブロック図である。上記実施形態及び各実施形態では、船舶の特性として、プロペラ推進速度及び主機特性を算出した。これに対して、本変形例によれば、船舶の特性として、風力推進速度(自船に対する風力に起因する自船の対水速度)を算出することができる。本変形例に係る船舶特性推定装置1fは、図18に示すように、GPS信号受信部2と、プロペラ回転数検出部3と、潮流計4と、演算部10fと、表示部5と、を備えている。
(9) FIG. 18 is a block diagram showing a configuration of a ship
GPS信号受信部2、プロペラ回転数検出部3、及び潮流計4は、上記実施形態の場合と同様の構成であり、上記実施形態の場合と同様に動作する。
The
演算部10fは、対地速度算出部11と、推定器12と、風力推進速度算出部26と、結合係数更新部14と、風力特性算出部27を備えている。対地速度算出部11、推定器12、結合係数更新部14は、上記実施形態の場合と同様の構成であり、上記実施形態の場合と同様に動作する。
The
風力推進速度算出部26は、上述したように、自船に対する風力に起因する自船の対水速度である風力推進速度を算出する。本実施形態では、風力推進速度算出部26は、推定器12から出力された対象速度としての出力値、及び対地速度算出部で算出された対地速度に基づき、風力推進速度を算出する。具体的には、風力推進速度算出部26は、対地速度から対象速度(推定器12からの出力値)を減算することにより、風力推進速度を算出する。
As described above, the wind power propulsion
図3を参照して、対地速度VGは、対象速度VSと風力推進速度VWindとを合成し
たベクトルである。よって、風力推進速度算出部26が、上述のように、対地速度VGから対象速度VSを減算することにより、風力推進速度VWindが算出される。With reference to FIG. 3, the ground speed V G is a vector obtained by synthesizing the target speed V S and the wind propulsion speed V Wind . Accordingly, the wind power propulsion
風力特性算出部27は、船舶に対する風力によって、船舶がどのような速度で移動するかを算出するためのものである。本実施形態では、風力特性算出部27は、風力の方向及び大きさに対する風力推進速度を算出する。
The wind power
図19は、表示部5に表示される風力特性の一例を示す図である。表示部5には、例えば一例として、図19に示すような風力特性が表示される。図19では、風速の大きさがV1[m/s]、V2[m/s]、V3[m/s]の場合のそれぞれにおいて、水平方向における各方位から風が吹いてきたと仮定した場合における、自船の移動速度(すなわち、風力推進速度)が表示される。これにより、ユーザは、どのような風向及び風速のときに、自船がどれくらい流されるか(移動するか)を知ることができる。そうすると、ユーザは、例えば一例として、今後の航路をより適切に推測することができる。FIG. 19 is a diagram illustrating an example of wind power characteristics displayed on the
なお、上記実施形態に係る船舶特性推定装置1における変形例として説明した各変形例は、本変形例に適宜、適用することができる。
In addition, each modification demonstrated as a modification in the ship
(10)図20は、変形例に係る船舶特性推定装置1gの構成を示すブロック図である。上記実施形態及び変形例では、船舶特性として、主機特性又は風力特性を算出した。これに対して、図20に示すように、本変形例によれば、主機特性及び風力特性の両方を算出することができる。 (10) FIG. 20 is a block diagram showing a configuration of a ship characteristic estimation apparatus 1g according to a modification. In the embodiment and the modification, the main engine characteristic or the wind power characteristic is calculated as the ship characteristic. On the other hand, as shown in FIG. 20, according to this modification, both the main engine characteristics and the wind power characteristics can be calculated.
図21は、本変形例に係る船舶特性推定装置1gの表示部5の表示例の一例を示す図である。本変形例に係る船舶特性推定装置1gでは、主機特性算出部15で算出された主機特性、及び風力特性算出部27で算出された風力特性に基づき、所定時間経過後の自船位置の範囲を推定することができる。図21は、主機の回転数が所定の回転数に維持された場合における、自船位置の範囲が示されている。具体的には、図21の実線で示す範囲は、主機が所定回転数での航行を続けた場合であって、最大で風速V3[m/s]の大きさの風が吹き続けた場合における、自船が存在しうる範囲を示している。これにより、ユーザは、所定時間経過後において自船が存在しうる範囲を予測することができる。FIG. 21 is a diagram illustrating an example of a display example of the
また、本変形例において、例えば、ユーザが所望の回転数を入力することにより、当該回転数に基づいた位置範囲の予測を行うこともできる。更には、本変形例において、表層流速度をも加味することにより、より精度の高い位置予測を行うこともできる。 In the present modification, for example, when the user inputs a desired rotation number, the position range can be predicted based on the rotation number. Furthermore, in this modification, it is also possible to perform more accurate position prediction by taking into account the surface layer flow velocity.
(11)図22は、変形例に係る船舶特性推定装置1hの構成を示すブロック図である。本変形例に係る船舶特性推定装置1hは、上記実施形態及び各変形例に係る船舶特性推定装置と同様、プロペラ推進速度及び主機特性を算出するが、その算出方法が異なっている。 (11) FIG. 22 is a block diagram showing a configuration of a ship characteristic estimation device 1h according to a modification. The ship characteristic estimation device 1h according to this modification example calculates the propeller propulsion speed and the main engine characteristic as in the ship characteristic estimation apparatus according to the above-described embodiment and each modification example, but the calculation method is different.
本変形例に係る船舶特性推定装置1hは、図22に示すように、プロペラ回転数検出部3と、対水速度計7と、推定器12hと、結合係数更新部14と、主機特性算出部15と、を備えている。プロペラ回転数検出部3は、上記実施形態の場合と同様に動作するため、その詳細な説明を省略する。
As shown in FIG. 22, the ship characteristic estimation device 1 h according to the present modification includes a propeller rotation
対水速度計7は、自船付近の対水速度を計測するためのものであり、自船に搭載されている。対水速度計7としては、例えば一例として、音響式の対水速度計が挙げられるが、これに限らず、その他の方式のものであってもよい。
The
図23は、推定器12hの構成の一例を模式的に示す図である。本実施形態では、推定器12hは、上記実施形態の場合(図2参照)と同様、ニューラルネットワークを用いて構成されている。しかし、上記実施形態の場合と異なり、プロペラの回転数が入力される入力ユニットUIN_1が1つ、設けられている。なお、推定器12hの構成はあくまで一例であり、各層におけるユニット数、隠れ層の層数については、図23に示す限りでない。FIG. 23 is a diagram schematically illustrating an example of the configuration of the
推定器12hでは、初期状態においては、各結合係数Wに適当な初期値が設定されている。そして、各結合係数Wは、結合係数更新部14によって随時、更新される。具体的には、各結合係数Wは、推定器12hから出力される出力値と、対水速度計7で計測された対水速度(教師信号)との誤差が少なくなるように、結合係数更新部14によって更新される。
In the
結合係数更新部14は、推定器12hから出力される出力値と、対水速度計7で計測された対水速度(教師信号)との誤差が少なくなるように、推定器12hの結合係数Wを更新する。結合係数更新部14は、例えば一例として、バックプロパゲーション(誤差逆伝播法)を用いて、結合係数Wを更新する。
The coupling
主機特性算出部15は、上記実施形態の場合と同様に動作することにより、例えば一例として図4に示す主機特性を算出する。
The main machine
[推定器から出力される出力値について]
図24は、推定器12hから出力される出力値が、該推定器12の結合係数Wが更新される毎に、プロペラ推進速度に収束していく理由を説明するための図である。上述のように、推定器12hに記憶される各結合係数Wは、推定器12hから随時出力される値と、随時計測される教師信号としての対水速度との誤差が小さくなるように、結合係数更新部14によって更新される。[Output value output from the estimator]
FIG. 24 is a diagram for explaining the reason why the output value output from the
上記実施形態において上述したように、風速は、海域、時刻、気象条件等に起因して、その大きさ及び向きが異なる。よって、プロペラの回転数が同じ場合における対水速度には、あらゆる大きさ及び向きの風速成分が含まれていると考えられる。よって、これらを平均化すると、風速成分が互いに打ち消し合い、プロペラ推進速度が残る。すなわち、推定器12hの結合係数Wが、上述のように、推定器12hの出力値と対水速度との誤差が小さくなるように更新されていくと、対水速度に含まれる風速成分の影響が徐々に小さくなるため、推定器12hの出力値は、プロペラ推進速度に収束していく。従って、学習が十分進んだ段階においては(すなわち、結合係数が十分な回数、更新された段階においては)、推定器12hからの出力値を、対象速度と推定することができる。
As described above in the embodiment, the wind speed has different sizes and directions due to the sea area, time, weather conditions, and the like. Therefore, it is considered that the wind speed component of any magnitude and direction is included in the water speed when the rotation speed of the propeller is the same. Therefore, when these are averaged, the wind speed components cancel each other, and the propeller propulsion speed remains. That is, when the coupling coefficient W of the
以上のように、本変形例に係る船舶特性推定装置1hでは、プロペラの回転数、及び対水速度に基づいて、プロペラ推進速度を算出している。これにより、プロペラの回転数と、その回転数のときの船舶の対水速度(プロペラ推進速度)との関係性を、比較的容易に把握することができる。しかも、本変形例に係る船舶特性推定装置1hによれば、上述した実施形態の場合よりも、プロペラ推進速度を推定するために必要となるパラメータが少なくて済むため、主機特性をより容易に求めることができる。 As described above, in the ship characteristic estimation device 1h according to this modification, the propeller propulsion speed is calculated based on the rotation speed of the propeller and the water speed. Thereby, the relationship between the rotation speed of the propeller and the water speed (propeller propulsion speed) of the ship at the rotation speed can be grasped relatively easily. In addition, according to the ship characteristic estimation device 1h according to the present modification, the number of parameters required for estimating the propeller propulsion speed is smaller than in the case of the above-described embodiment, so that the main engine characteristic can be obtained more easily. be able to.
また、船舶特性推定装置1hでは、推定器12hを、ニューラルネットワークを用いて構成している。これにより、プロペラ推進速度を出力可能な推定器12hを適切に構成することができる。
Moreover, in the ship characteristic estimation apparatus 1h, the
また、船舶特性推定装置1hでは、推定器12hの出力値と、対水速度との誤差が少な
くなるように、推定器12hを更新している。これにより、学習機能を備えた推定器12hを構成することができる。しかも、船舶特性推定装置1hでは、正確なプロペラ推進速度を推定するために必要な多量のデータを航行中に蓄積することができるため、学習データ(ある条件時における対地速度のデータ)を予め準備する手間を省くことができる。Moreover, in the ship characteristic estimation apparatus 1h, the
また、船舶特性推定装置1hでは、推定器12hの出力値と対水速度との誤差が少なくなるように、推定器12hに記憶された結合係数Wを更新している。これにより、推定器12hを適切に更新することができる。
Further, in the ship characteristic estimation device 1h, the coupling coefficient W stored in the
なお、本変形例に係る船舶特性推定装置1hに、図10から図14を参照して説明した学習係数設定処理部を設けることもできる。これにより、図10から図14を参照して説明した変形例の場合と同様、適切な学習係数を設定できる。 Note that the learning coefficient setting processing unit described with reference to FIGS. 10 to 14 may be provided in the ship characteristic estimation device 1h according to the present modification. Accordingly, an appropriate learning coefficient can be set as in the modification described with reference to FIGS. 10 to 14.
(12)図25は、変形例に係る船舶特性推定装置1iの構成を示すブロック図である。本変形例に係る船舶特性推定装置1iは、図22に示す船舶特性推定装置1hと異なり、結合係数更新部14が省略された構成となっている。すなわち、本変形例に係る船舶特性推定装置1iは、学習機能を有さない。また、本変形例に係る船舶特性推定装置1iは、対水速度計7も省略された構成となっている。
(12) FIG. 25 is a block diagram showing a configuration of a ship
本変形例に係る船舶特性推定装置1iでは、予め取得された多くの学習データ(各回転数時のときの対水速度のデータ)に基づいて結合係数Wが決定された推定器12iによって、プロペラ推進速度としての出力値が出力される。このような構成であっても、上記実施形態の場合と同様、プロペラ推進速度を容易に算出することができる。
In the ship
(13)図26は、変形例に係る船舶特性推定装置1jの構成を示すブロック図である。本変形例に係る船舶特性推定装置1jは、図22に示す船舶特性推定装置1hと比べて、推定器12jの構成が大きく異なっている。具体的には、推定器12jが、ニューラルネットワークを用いて構成されておらず、記憶部16j及び更新部17jを備えた構成となっている。
(13) FIG. 26 is a block diagram showing a configuration of a ship
図27は、図26に示す推定器12jについて詳細に説明するための図である。
FIG. 27 is a diagram for explaining the
記憶部16jには、図27に示すように、随時、検出された回転数の検出時に計測された複数の対水速度が、対応する回転数毎(図27の場合、R1,R2,R3,…毎)に記憶されている。図27では、1つの対水速度の値が、1つの丸印で示されている。すなわち、記憶部16jには、例えば、回転数がR1のときに算出された対水速度の値が、5つ、記憶されている。
In the
推定器12jに、プロペラ回転数検出部3で検出された回転数(例えばR2)が入力されると、推定器12jは、回転数R2に対応する対水速度(図27の場合、10個)の平均値を算出する。そして、推定器12jは、その平均値を出力値として出力する。
When the rotational speed (for example, R2) detected by the propeller rotational
図24を用いて上述したように、ある回転数時における対水速度を平均化すると、対水速度に含まれる風速成分が互いに相殺されるため、その平均値は、プロペラ推進速度に近い値になる。従って、本変形例に係る推定器12jによっても適切にプロペラ推進速度を推定することができる。
As described above with reference to FIG. 24, when the water speed at a certain number of revolutions is averaged, the wind speed components included in the water speed cancel each other, so the average value is close to the propeller propulsion speed. Become. Therefore, the propeller propulsion speed can be appropriately estimated also by the
更新部17jは、推定器12jに入力された回転数が検出されたタイミングにおいて算出された対水速度を用いて、記憶部16jに記憶されているテーブルを更新する。具体的には、所定の回転数(例えばR3)に算出された対水速度を、R3で特定されるセルに追
加する。この動作が随時、行われることにより、航行中であっても学習データが蓄積され、より正確に対象速度を推定することができる。すなわち、本変形例に係る推定器12jも、学習機能を有している。その結果、より正確にプロペラ推進速度を推定できる。The
なお、本変形例において更新部17j、及び対水速度計7を省略した構成とすることにより、学習機能を有さない船舶特性推定装置1kを構成することができる(図28参照)。この場合、記憶部16kに、予め所得した複数の学習データ(図27における丸印1つに対応するデータ)を記憶させておく必要がある。
In addition, the ship
(14)図29は、変形例に係る船舶特性推定装置1lの構成を示すブロック図である。本変形例に係る船舶特性推定装置1lは、図22を参照して説明した変形例に係る船舶特性推定装置1hにおいて、風力推進速度算出部26a及び風力特性算出部27を加えた構成となっている。これにより、本実施形態に係る船舶特性推定装置1lでは、主機特性の他に、風力特性をも算出することができる。
(14) FIG. 29 is a block diagram showing a configuration of a ship
図30は、対水速度VWと、プロペラ推進速度Vpと、風力推進速度VWindとの関係を示すベクトル図である。風力推進速度算出部26aは、推定器12lから出力された出力値(すなわち、プロペラ推進速度Vp)と、対水速度計7で計測された対水速度とに基づき、風力推進速度VWindを算出する。具体的には、風力推進速度算出部26aは、対水速度からプロペラ推進速度を減算することにより、風力推進速度を算出している。FIG. 30 is a vector diagram showing a relationship among the water speed V W , the propeller propulsion speed V p, and the wind power propulsion speed V Wind . The wind power propulsion
風力特性算出部27は、図18を用いて説明した変形例に係る風力特性算出部27と同様に動作し、例えば一例として、図19に示すような風力特性を表示部5に表示する。
The wind force
よって、本変形例によっても、図18を用いて説明した変形例と同様、風力特性を容易に算出することができる。しかも、本変形例に係る船舶特性推定装置1lによれば、図18に示す場合よりも、風力推進速度を推定するために必要となるパラメータが少なくて済むため、風力特性をより容易に求めることができる。
Therefore, according to the present modification, wind power characteristics can be easily calculated as in the modification described with reference to FIG. Moreover, according to the ship
(15)図31は、対水速度を算出するための対水速度算出部の構成を示すブロック図である。上述した各変形例(図22、図26、図29等)では、対水速度を算出するために、対水速度計7を用いたが、これに限らず、例えば図31に示すような構成の対水速度算出部8を用いてもよい。
(15) FIG. 31 is a block diagram showing the configuration of the water speed calculation unit for calculating the water speed. In each of the above-described modified examples (FIGS. 22, 26, 29, etc.), the
対水速度算出部8には、上述した対地速度算出部11で算出された対地速度、及び潮流計4で計測された表層流速度が入力される。そして、対水速度算出部8は、対地速度から表層流速度を減算することにより、対水速度を算出する。これにより、対水速度を適切に算出することができる。
The ground speed calculated by the
1,1a,1b,1c,…,1l 船舶特性推定装置
12,12a,…,12d,12h,…12l 推定器
13 プロペラ推進速度算出部1, 1a, 1b, 1c,..., 1l Ship
Claims (17)
前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記表層流速度ベクトルとに基づき、前記プロペラ推進速度ベクトルを算出するプロペラ推進速度算出部と、
を備えていることを特徴とする、船舶特性推定装置。Accepts the input of the surface flow velocity vector, which is the velocity vector of the surface flow at the target point where the vessel to be navigated, and the rotation speed of the propeller of the ship at the target point, and the value of the received surface flow velocity vector And a value corresponding to each condition specified by the combination of the rotation speed values, the propeller propulsion speed vector, which is the speed vector of the ship resulting from the rotation of the propeller, and the surface flow velocity vector are combined. An estimator that estimates and outputs a velocity vector;
A propeller propulsion speed calculation unit that calculates the propeller propulsion speed vector based on the output value as the target speed vector estimated by the estimator and the surface flow velocity vector;
The ship characteristic estimation apparatus characterized by comprising.
前記プロペラ推進速度算出部は、前記推定器から出力された前記出力値から、前記表層流速度ベクトルを減算することにより、前記プロペラ推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。In the ship characteristic estimation device according to claim 1,
The propeller propulsion speed calculation unit calculates the propeller propulsion speed vector by subtracting the surface flow velocity vector from the output value output from the estimator.
前記対象地点における表層流の速度ベクトルである表層流速度ベクトル、及び、前記対象地点における前記船舶のプロペラの回転数の入力を受け付けるとともに、受け付けられた前記表層流速度ベクトルの値及び前記回転数の値の組み合わせにより特定される各条件に対応する値を、前記プロペラの回転に起因する前記船舶の速度ベクトルであるプロペラ推進速度ベクトルと前記表層流速度ベクトルとが合成された対象速度ベクトル、と推定して出力する推定器と、
前記推定器で推定された前記対象速度ベクトルとしての出力値と、前記対地速度算出部で算出された前記対地速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトルを算出する風力推進速度算出部と、
を備えていることを特徴とする、船舶特性推定装置。A ground speed calculation unit for calculating a ground speed vector of the ship at a target point where the navigating ship is located;
Accepting the input of the surface flow velocity vector, which is the velocity vector of the surface flow at the target point, and the rotation speed of the propeller of the ship at the target point, the value of the received surface flow velocity vector and the rotation number A value corresponding to each condition specified by a combination of values is estimated as a target speed vector obtained by combining a propeller propulsion speed vector that is a speed vector of the ship due to rotation of the propeller and the surface flow speed vector. Output estimator,
Based on the output value as the target speed vector estimated by the estimator and the ground speed vector calculated by the ground speed calculation unit, the speed vector of the ship resulting from wind power for the ship at the target point A wind power propulsion speed calculation unit for calculating a wind power propulsion speed vector,
The ship characteristic estimation apparatus characterized by comprising.
前記風力推進速度算出部は、前記対地速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to claim 3,
The ship propulsion speed calculation unit calculates the wind power propulsion speed vector by subtracting the output value output from the estimator from the ground speed vector.
前記推定器は、ニューラルネットワークを用いて構成されていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 1 to 4,
The ship estimator, wherein the estimator is configured using a neural network.
前記船舶の対地速度ベクトルを算出する対地速度算出部を更に備え、
前記推定器は、前記各条件に対応する複数の前記対地速度ベクトルの平均値を前記出力値として出力するように、構成されていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 1 to 4,
A ground speed calculation unit for calculating a ground speed vector of the ship;
The ship estimator, wherein the estimator is configured to output an average value of a plurality of ground speed vectors corresponding to the respective conditions as the output value.
前記船舶の対地速度ベクトルを算出する対地速度算出部と、
前記推定器からの前記出力値と、前記対地速度算出部で算出された前記対地速度ベクトルとを比較するとともに、該出力値と該対地速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、
を更に備えていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 1 to 6,
A ground speed calculation unit for calculating a ground speed vector of the ship;
The output value from the estimator and the ground speed vector calculated by the ground speed calculation unit are compared, and the estimator is adjusted so that an error between the output value and the ground speed vector is reduced. An update section to update;
The ship characteristic estimation apparatus characterized by further including.
前記推定器は、ニューラルネットワークを用いて構成され、
それぞれに、前記表層流速度ベクトルに関する情報及び前記回転数のいずれかが入力される複数の入力ユニットと、
前記対象速度ベクトルとしての前記出力値を出力する出力ユニットと
を有し、
前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、
前記更新部は、前記出力値と、教師信号としての前記対地速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新することを特徴とする、船舶特性推定装置。In the ship characteristic estimation device according to claim 7,
The estimator is configured using a neural network,
Each of the plurality of input units to which either the information on the surface flow velocity vector and the rotation speed are input,
An output unit that outputs the output value as the target velocity vector;
The value output from the input side unit in the neural network is multiplied by a coupling coefficient and then transmitted to the output side unit.
The update unit compares the output value with the ground speed vector as a teacher signal, and updates the coupling coefficient so that an error between the output value and the teacher signal is reduced. A ship characteristic estimation device.
前記船舶の対地速度ベクトルを算出する対地速度算出部と、
前記船舶に搭載され、GNSS信号を受信するGNSS信号受信部と、を更に備え、
前記対地速度算出部は、前記GNSS信号受信部で受信されたGNSS信号、及び該GNSS信号が受信された時刻に基づき、前記対地速度ベクトルを算出することを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 1 to 8,
A ground speed calculation unit for calculating a ground speed vector of the ship;
A GNSS signal receiving unit that is mounted on the ship and receives a GNSS signal;
The ground speed calculation unit calculates the ground speed vector based on a GNSS signal received by the GNSS signal reception unit and a time when the GNSS signal is received.
前記回転数を検出するプロペラ回転数検出部と、
前記表層流速度ベクトルを計測する潮流計と、を更に備え、
前記推定器には、前記プロペラ回転数検出部で検出された前記回転数と、前記潮流計で計測された前記表層流速度ベクトルと、が入力されることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus of any one of Claims 1-9,
A propeller rotation number detection unit for detecting the rotation number;
A tidal meter for measuring the surface flow velocity vector,
The ship characteristic estimation device, wherein the estimator receives the rotation speed detected by the propeller rotation speed detection unit and the surface layer flow velocity vector measured by the tide meter.
前記推定器は、ニューラルネットワークを用いて構成されていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to claim 11,
The ship estimator, wherein the estimator is configured using a neural network.
前記船舶の対水速度ベクトルを算出する対水速度算出部を更に備え、
前記推定器は、前記回転数の検出時における複数の前記対水速度ベクトルであって、前記回転数の各値に対応する複数の前記対水速度ベクトル、の平均値を、前記プロペラ推進速度ベクトルとして出力するように、構成されていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to claim 11,
A water velocity calculation unit for calculating a water velocity vector of the ship;
The estimator calculates an average value of the plurality of water speed vectors corresponding to each value of the rotation speed at the time of detecting the rotation speed, and the propeller propulsion speed vector. It is comprised so that it may output as, The ship characteristic estimation apparatus characterized by the above-mentioned.
前記船舶の対水速度ベクトルを算出する対水速度算出部と、
前記推定器からの出力値と、前記対水速度算出部で算出された前記対水速度ベクトルとを比較するとともに、該出力値と該対水速度ベクトルとの誤差が少なくなるように、前記推定器を更新する更新部と、
を更に備えていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 11 to 13,
A water speed calculation unit for calculating a water speed vector of the ship;
The output value from the estimator is compared with the water speed vector calculated by the water speed calculation unit, and the estimation is performed so that an error between the output value and the water speed vector is reduced. An update unit for updating the container;
The ship characteristic estimation apparatus characterized by further including.
前記推定器は、ニューラルネットワークを用いて構成され、
前記回転数が入力される入力ユニットと、
前記出力値を出力する出力ユニットと
を有し、
前記ニューラルネットワークにおける入力側のユニットから出力される値には、結合係数が乗算された後、出力側のユニットに伝送され、
前記更新部は、前記出力値と、教師信号としての前記対水速度ベクトルとを比較するとともに、該出力値と該教師信号との誤差が少なくなるように、前記結合係数を更新することを特徴とする、船舶特性推定装置。In the ship characteristic estimation device according to claim 14,
The estimator is configured using a neural network,
An input unit for inputting the rotational speed;
An output unit for outputting the output value,
The value output from the input side unit in the neural network is multiplied by a coupling coefficient and then transmitted to the output side unit.
The updating unit compares the output value with the water velocity vector as a teacher signal, and updates the coupling coefficient so that an error between the output value and the teacher signal is reduced. A ship characteristic estimation device.
前記推定器から出力された出力値と、前記対象地点における前記船舶の対水速度ベクトルとに基づき、前記対象地点における前記船舶に対する風力に起因する前記船舶の速度ベクトルである風力推進速度ベクトル、を算出する風力推進速度算出部、を更に備えていることを特徴とする、船舶特性推定装置。In the ship characteristic estimation apparatus according to any one of claims 11 to 15,
Based on the output value output from the estimator and the water velocity vector of the ship at the target point, a wind propulsion speed vector that is a speed vector of the ship due to wind power with respect to the ship at the target point, A ship characteristic estimation device, further comprising a wind power propulsion speed calculation unit.
前記風力推進速度算出部は、前記対水速度ベクトルから、前記推定器から出力された前記出力値を減算することにより、前記風力推進速度ベクトルを算出することを特徴とする、船舶特性推定装置。In the ship characteristic estimation device according to claim 16,
The ship propulsion speed calculation unit calculates the wind propulsion speed vector by subtracting the output value output from the estimator from the water speed vector.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014034479 | 2014-02-25 | ||
| JP2014034479 | 2014-02-25 | ||
| PCT/JP2015/051302 WO2015129338A1 (en) | 2014-02-25 | 2015-01-20 | Vessel characteristics estimation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2015129338A1 JPWO2015129338A1 (en) | 2017-03-30 |
| JP6154540B2 true JP6154540B2 (en) | 2017-06-28 |
Family
ID=54008667
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016505098A Expired - Fee Related JP6154540B2 (en) | 2014-02-25 | 2015-01-20 | Ship characteristic estimation device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6154540B2 (en) |
| WO (1) | WO2015129338A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101951142B1 (en) * | 2018-04-13 | 2019-02-21 | 한국해양과학기술원 | System for estimating loss data of a ship using machine learning |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6770471B2 (en) * | 2017-03-29 | 2020-10-14 | 本田技研工業株式会社 | Small vessel maneuvering assist system |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10027863C2 (en) * | 2000-06-06 | 2003-07-03 | Eads Deutschland Gmbh | Railway regulator for vehicles with a path influenced by a flow |
| JP4804032B2 (en) * | 2005-05-11 | 2011-10-26 | 日本無線株式会社 | Automatic navigation assistance system for ships |
| JP2011063064A (en) * | 2009-09-15 | 2011-03-31 | Nabtesco Corp | Turning device for propulsion unit |
| JP5033210B2 (en) * | 2010-03-31 | 2012-09-26 | 三井造船株式会社 | Ship main engine control system and method |
| JP5932362B2 (en) * | 2012-01-25 | 2016-06-08 | マロール株式会社 | Hull Control Device, Hull Control Program, and Hull Control Method |
-
2015
- 2015-01-20 JP JP2016505098A patent/JP6154540B2/en not_active Expired - Fee Related
- 2015-01-20 WO PCT/JP2015/051302 patent/WO2015129338A1/en active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101951142B1 (en) * | 2018-04-13 | 2019-02-21 | 한국해양과학기술원 | System for estimating loss data of a ship using machine learning |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2015129338A1 (en) | 2017-03-30 |
| WO2015129338A1 (en) | 2015-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6513677B2 (en) | Ship characteristic estimation device and automatic steering device | |
| EP3321631B1 (en) | A inertial and terrain based navigation system | |
| US11041724B2 (en) | Navigation system | |
| US20080294308A1 (en) | Method and apparatus for real-time polars | |
| JP6340067B2 (en) | Surface flow estimation device, surface flow estimation system, ocean model estimation device, and risk determination device | |
| JP2020158072A (en) | Vessel performance estimation method and vessel performance estimation system by assimilation of data | |
| GB2474715A (en) | Aiding navigation of a marine vessel in a tidal region | |
| KR102340167B1 (en) | Methods and systems for optimizing the operation of ships | |
| KR101658133B1 (en) | System for calculating collision risk of vessel | |
| JP6154540B2 (en) | Ship characteristic estimation device | |
| KR20170078835A (en) | Method of calculating the surface speed of at least one ship and method for deduction of each vector derived at any point of the trajectory of said ship | |
| JP2019020166A (en) | Orientation estimation device | |
| WO2022230332A1 (en) | Ship monitoring system, ship monitoring method, information processing device, and program | |
| JP6864483B2 (en) | Disturbance guesser | |
| JP2016114478A (en) | Flow velocity difference estimation device | |
| JP2006330884A (en) | Tide prediction system | |
| KR101554615B1 (en) | Apparatus and method for estimating size of external force applied to ships and apparatus for generating ships route information | |
| US20250026458A1 (en) | Method for assisting with guiding a surface vessel for towing an underwater device by means of a cable | |
| JP2019090645A (en) | Log speed estimation device, log speed display device, periodic current measuring device, automatic navigation device, and method for estimating log speed | |
| CN119743497A (en) | Telematics | |
| JP2023183382A (en) | Disturbance estimation device, disturbance estimation method, and disturbance estimation program | |
| RU2564786C1 (en) | Control over ship move with compensated slowly-varying external disturbances and ship control system to this end | |
| JP2011086196A (en) | Image display apparatus, image display method and image display program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170530 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170601 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6154540 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |