JP5321728B2 - 車両用シフト制御装置 - Google Patents
車両用シフト制御装置 Download PDFInfo
- Publication number
- JP5321728B2 JP5321728B2 JP2012500426A JP2012500426A JP5321728B2 JP 5321728 B2 JP5321728 B2 JP 5321728B2 JP 2012500426 A JP2012500426 A JP 2012500426A JP 2012500426 A JP2012500426 A JP 2012500426A JP 5321728 B2 JP5321728 B2 JP 5321728B2
- Authority
- JP
- Japan
- Prior art keywords
- state
- supply voltage
- actuator
- vehicle
- drive motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003745 diagnosis Methods 0.000 abstract description 5
- 230000005540 biological transmission Effects 0.000 description 56
- 238000001514 detection method Methods 0.000 description 50
- 238000000034 method Methods 0.000 description 37
- 230000008569 process Effects 0.000 description 28
- 238000010586 diagram Methods 0.000 description 16
- 230000007246 mechanism Effects 0.000 description 14
- 230000007423 decrease Effects 0.000 description 12
- 230000006870 function Effects 0.000 description 11
- 238000011084 recovery Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 230000002829 reductive effect Effects 0.000 description 7
- 230000001276 controlling effect Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000004913 activation Effects 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 230000001172 regenerating effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013475 authorization Methods 0.000 description 1
- 239000013256 coordination polymer Substances 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
Images













Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
- F16H63/3458—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire
- F16H63/3466—Parking lock mechanisms or brakes in the transmission with electric actuating means, e.g. shift by wire using electric motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/02—Final output mechanisms therefor; Actuating means for the final output mechanisms
- F16H63/30—Constructional features of the final output mechanisms
- F16H63/34—Locking or disabling mechanisms
- F16H63/3416—Parking lock mechanisms or brakes in the transmission
- F16H63/3491—Emergency release or engagement of parking locks or brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/48—Signals to a parking brake or parking lock; Control of parking locks or brakes being part of the transmission
- F16H63/483—Circuits for controlling engagement of parking locks or brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
- F16H2061/1256—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected
- F16H2061/1288—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected the failing part is an actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures
- F16H2061/1256—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected
- F16H2061/1292—Detecting malfunction or potential malfunction, e.g. fail safe; Circumventing or fixing failures characterised by the parts or units where malfunctioning was assumed or detected the failing part is the power supply, e.g. the electric power supply
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gear-Shifting Mechanisms (AREA)
- Control Of Transmission Device (AREA)
Description
本発明は、シフトバイワイヤシステムにおいて、それのフェイル時の処理に関するものである。
電動モータ等の電動アクチュエータを作動させて車両の走行に関わるシフトポジションを電気的に切り替える所謂シフトバイワイヤ(SBW)方式を採用した車両用シフト制御装置が良く知られている。例えば、特許文献1に開示されているシフトレンジ切替装置が有するSBW制御装置がそれである。そのSBW制御装置は、それの電源が瞬断されその瞬断後に再起動された場合に、その瞬断前に前記アクチュエータが駆動されておらず、且つ、その瞬断前に記憶された前記電動アクチュエータの出力軸位置(出力軸回転角度)の記憶が維持されていれば、再起動後における上記出力軸位置が上記瞬断前に記憶された出力軸位置であるとして認識する。
前記SBW制御装置の電源が瞬断された後のようにそのSBW制御装置が起動された後に、車両が前記電動アクチュエータの動作不可能なフェイル状態になっていることもあり得ることである。例えば、そのようなフェイル状態になる原因としては、その電動アクチュエータ自身の故障や、その電動アクチュエータへの供給電圧が低下してその電動アクチュエータを駆動できる下限電圧を下回っている場合などが考えられる。
通常、前記SBW制御装置は、それの起動後に前記電動アクチュエータが動作不可能であると判断した場合には、その判断以後、その電動アクチュエータは動作不可能であるとして、その電動アクチュエータを動作させないようフェイルセーフ処理を行う。例えば、そのフェイルセーフ処理では車両走行できる状態に遷移させないようにする。
しかし、前記電動アクチュエータが動作不可能である原因が前記供給電圧の低下によるものである場合すなわちその供給電圧の不足によるものである場合には、その供給電圧が前記下限電圧以上に回復しそれにより前記電動アクチュエータが動作可能になることがあり得る。このような場合、上記供給電圧の回復により前記電動アクチュエータが動作可能になれば、その電動アクチュエータが動作可能になったことを認識して、上記フェイルセーフ処理を解除して、その電動アクチュエータが動作可能であることを前提とした正常時の制御を行うことが適切であるが、そのようなことはなされておらず、前記電動アクチュエータが動作不可能であるとの判断が継続されていた。なお、このような課題は未公知である。
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、前記電動アクチュエータが動作不可能と判定された場合において、その後に電動アクチュエータが動作可能になる場合を加味して適切な処理を行うことができる車両用シフト制御装置を提供することにある。
前記目的を達成するための本発明の要旨とするところは、(a)電動のアクチュエータの駆動により、車輪の回転を拘束するロック位置とその車輪の回転を拘束しない非ロック位置とに選択的に切り替えられるパーキングロック装置を備えた車両において、前記アクチュエータが動作可能であるか否かを判定するフェイル状態判定を行う車両用シフト制御装置であって、(b)前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が予め定められた供給電圧判定値未満からその供給電圧判定値以上になった場合には、前記アクチュエータの駆動を許可することにある。
電動の前記アクチュエータへの供給電圧が前記供給電圧判定値未満から供給電圧判定値以上に回復したとすれば、その回復前になされた前記アクチュエータが動作不可能であるとの判定は前記アクチュエータへの供給電圧の低下に起因するものと考えられ、また、その供給電圧の回復後には前記アクチュエータが動作可能な状態になっているものと考えられる。従って、上記の本発明によれば、前記アクチュエータが動作不可能と判定された場合において、その後に上記アクチュエータが動作可能になる場合、具体的には前記供給電圧が回復する場合を加味して適切な処理を行うことができる。例えば、適切な処理とは、前記アクチュエータが動作可能である場合にはそのアクチュエータが動作可能であることを前提として正常時のアクチュエータの制御をすること等である。一方、不適切な処理とは、前記アクチュエータが動作可能である場合にそれが動作不可能であると認識してそのアクチュエータを動作させない等のフェイル時の処理をすることである。
ここで、好適には、前記供給電圧判定値は、前記アクチュエータの供給電圧の下限値である。このようにすれば、前記アクチュエータが動作不可能と判定された場合においてその原因が上記供給電圧の低下によるものであることを、より適切に判断できる。
また、好適には、前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が前記供給電圧判定値未満からその供給電圧判定値以上になった場合には、前記フェイル状態判定を再度行い、その再度のフェイル状態判定で前記アクチュエータが動作可能であると判定した場合に限り前記アクチュエータの駆動を許可する。このようにすれば、前記アクチュエータへの供給電圧の回復によってそのアクチュエータが動作可能になったことを確実に認識した上で、前記アクチュエータの駆動を許可することが可能である。
また、好適には、前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が前記供給電圧判定値未満からその供給電圧判定値以上になった場合には、予め定められた乗員による操作が前記供給電圧が前記供給電圧判定値以上になった後になされたことを条件に、前記アクチュエータの駆動を許可する。このようにすれば、前記アクチュエータが駆動するとしてもそれは乗員による操作の後であるので、例えば乗員が前記アクチュエータの動作不可能を認識しているときに、その乗員に違和感を生じさせることを回避できる。
また、好適には、前記予め定められた乗員による操作は、前記車両を走行可能な状態に切り替える操作である。このようにすれば、その車両を走行可能な状態に切り替える操作は車両走行を開始するには必要な操作であるので、前記アクチュエータの駆動を許可する際に乗員による特別な操作が必要とされないという利点がある。
また、好適には、(a)前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した場合には、前記アクチュエータの駆動を禁止し、(b)前記アクチュエータの駆動を禁止した後にそのアクチュエータの駆動を許可する場合には、その禁止を解除してからその許可をする。このようにすれば、前記アクチュエータが動作不可能である場合にそのアクチュエータを駆動させようとすることが回避される。また、前記アクチュエータの駆動を禁止することと許可することとが錯綜するのを回避できる。
また、好適には、前記車両は、例えば動力源から駆動輪までの動力伝達経路に車両用動力伝達装置を備えている。この動力源としては、例えば燃料の燃焼によって動力を発生する内燃機関等のガソリンエンジンやディーゼルエンジン等が好適に用いられるが、電動機等の他の原動機を単独で或いはエンジンと組み合わせて採用することもできる。つまり、前記車両は、例えばエンジンのみを動力源とするエンジン駆動車両や、電動機のみを動力源とする電気自動車、エンジンおよび電動機の両方を動力源とするハイブリッド車両、エンジンや電動機以外の原動機を動力源として備えている車両、或いは3つ以上の原動機を備えている車両などにより構成される。
また、好適には、前記車両用動力伝達装置は、例えば変速機単体、トルクコンバータ及び複数の変速比を有する変速機、或いはこの変速機等に加え減速機構部やディファレンシャル機構部により構成される。この変速機は、例えば前記電気自動車において前記電動機が連結される遊星歯車装置等の減速機、複数組の遊星歯車装置の回転要素が係合装置によって選択的に連結されることにより複数のギヤ段(変速段)が択一的に達成される例えば前進4段、前進5段、前進6段、更にはそれ以上の変速段を有する等の種々の遊星歯車式自動変速機、常時噛み合う複数対の変速ギヤを2軸間に備えてそれら複数対の変速ギヤのいずれかを同期装置によって択一的に動力伝達状態とする同期噛合型平行2軸式変速機ではあるが、油圧アクチュエータにより駆動される同期装置によって変速段が自動的に切換られることが可能な同期噛合型平行2軸式自動変速機、動力伝達部材として機能する伝動ベルトが有効径が可変である一対の可変プーリに巻き掛けられ変速比が無段階に連続的に変化させられる所謂ベルト式無段変速機、共通の軸心まわりに回転させられる一対のコーンとその軸心と交差する回転中心回転可能な複数個のローラがそれら一対のコーンの間で挟圧されそのローラの回転中心と軸心との交差角が変化させられることによって変速比が可変とされた所謂トラクション型無段変速機、エンジンからの動力を第1電動機および出力軸へ分配する例えば遊星歯車装置で構成される差動機構とその差動機構の出力軸に設けられた第2電動機とを備えてその差動機構の差動作用によりエンジンからの動力の主部を駆動輪側へ機械的に伝達しエンジンからの動力の残部を第1電動機から第2電動機への電気パスを用いて電気的に伝達することにより電気的に変速比が変更される電気式無段変速機として機能する自動変速機、或いはエンジン軸や出力軸などに動力伝達可能に電動機が備えられる所謂パラレル式のハイブリッド車両に搭載される自動変速機などにより構成される。
また、好適には、前記パーキングロック装置は、前記ロック位置では前記車輪と共に回転する回転歯にロック歯を噛み合わせることによりロック状態となり、前記非ロック位置ではそのロック状態が解除された非ロック状態となる。そして、上記回転歯は、例えば上記車輪に連結された変速機の出力回転部材に固定されるが、その車輪に対して直結範囲の他の回転部材に固定することもできる。
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
図1は、本発明が適用される車両10を構成するエンジン12から駆動輪14までの動力伝達経路の概略構成を説明する図であると共に、パーキングロック装置16などを制御するために車両10に設けられた制御系統の要部を説明するブロック線図である。図1において、車両10は、パーキングロック装置16、変速機18、シフト操作装置30などを備え、車両10の走行に関わるシフトポジションすなわち変速機18のシフトポジション(シフトレンジ)を電気的に切り替えるシフトバイワイヤ(SBW)方式を採用している。また、変速機18は、例えば車両10において横置きされるFF(フロントエンジン・フロントドライブ)型車両に好適に用いられるものであり、走行用駆動力源としての内燃機関であるエンジン12の動力をカウンタギヤ対20の一方を構成する変速機18の出力回転部材としての出力歯車22から、動力伝達装置としてのカウンタギヤ対20、ファイナルギヤ対24、差動歯車装置(ディファレンシャルギヤ)26、及び一対の車軸(ドライブシャフト(D/S))28等を順次介して一対の駆動輪14へ伝達する。これら変速機18、カウンタギヤ対20、ファイナルギヤ対24、差動歯車装置(ディファレンシャルギヤ)26等によりトランスアクスル(T/A)が構成される。尚、以下においては、駆動力源としてのエンジン12及び電動機Mを備えたハイブリッド車両に本発明が適用された場合の例について説明するが、本発明が適用される車両は、シフトバイワイヤ方式を採用しておれば、通常のエンジン車両、ハイブリッド車両、電動車両、燃料電池車両などどのような形式の車両であっても構わない。
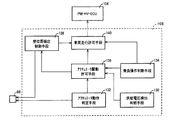
また、車両10には、パーキングロック装置16の作動状態などを制御する為の車両用のシフト制御装置を含む電子制御装置100が備えられている。電子制御装置100は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより、エンジン12の出力制御や電動機Mの駆動制御等のハイブリッド駆動制御、変速機18の変速制御、シフトバイワイヤ方式を用いた変速機18のシフトポジションの切替制御、パーキングロック装置16の作動状態の切替制御などを実行する。
電子制御装置100には、例えばシフトレバー32の操作位置(操作ポジション)PSHを検出する為の位置センサであるシフトセンサ36及びセレクトセンサ38(図2参照)からの操作ポジションPSHに応じたシフトレバー位置信号、ユーザにより操作されて変速機18のシフトポジションをパーキングポジション(Pポジション)以外の非PポジションからPポジションへ切り替える為のPスイッチ34におけるスイッチ操作を表すPスイッチ信号、パーキングロック(Pロック)を作動或いは解除して変速機18のシフトポジションをPポジションと非Pポジションとの間で切り替える為のパーキングロック装置16におけるPロックの作動状態を表すP位置信号、ユーザにより操作されて車両10の電源供給の切替状態を切り替える為の車両電源スイッチ40におけるスイッチ操作を表すパワースイッチ信号、回転速度センサとしての車輪速センサ42からの各車輪(駆動輪14及び従動輪)の回転速度NWを表す車速Vに対応する車輪速パルス信号、常用ブレーキの作動を検出する為の不図示のフットブレーキペダルが操作されたことを示すブレーキスイッチ44からのブレーキオン状態BONを表すブレーキ操作信号、蓄電装置46の充電電流または放電電流ICDを表す信号、蓄電装置46の電圧VBATを表す信号、蓄電装置46の充電状態(充電残量)SOCを表す信号などが、それぞれ供給される。
また、電子制御装置100からは、例えばエンジン12の出力制御の為のエンジン出力制御指令信号や変速機18内の電動機Mの駆動制御の為のモータ制御指令信号や変速機18の変速制御の為の変速制御指令信号などのハイブリッド制御指令信号、変速機18のシフトポジションを切り替える為のシフトポジション切換制御指令信号、車両走行に関わる車両情報をユーザに明示する為の表示装置としての公知のコンビネーションメータ56内に設けられたスピードメータ58を作動させて現在の車速Vを表示する為の車速表示制御指令信号、コンビネーションメータ56内に設けられたシフトポジションインジケータ(シフトポジション表示装置)60を作動させて変速機18におけるシフトポジションの切替状態を表示する為のシフトポジション表示制御指令信号、Pロックの作動中(パーキングロック状態、Pロック状態)すなわちシフトポジションがPポジションにあることを点灯により明示する為のロック表示ランプとしてのPポジションインジケータランプ62を作動させてPロック状態を表示する為のパーキングロック表示制御指令信号(Pロック表示制御指令信号)、パーキングロック装置16の切換制御の為のP切替制御指令信号等が、それぞれ出力される。尚、Pポジションインジケータランプ62は、コンビネーションメータ56の作動(点灯/消灯)とは連動せずに作動させられる表示ランプであって、例えばPスイッチ34に設けられている。
具体的には、電子制御装置100は、電源制御及びハイブリッド制御用コンピュータ(以下、「PM−HV−ECU」と表す)104、パーキング制御用コンピュータ(以下、「P−ECU」と表す)106、メータ制御用コンピュータ(以下、「メータECU」と表す)108などを備えている。なお、上記P−ECU106が本発明の車両用シフト制御装置に対応する。
PM−HV−ECU104は、例えばユーザにより操作される車両電源スイッチ40からのパワースイッチ信号に基づいて車両10の電源供給の切替状態を切り替える。ここで、本実施例では、車両10の電源供給の切替状態として、例えば車両走行を不能とする為の電源オフ状態(ALL-OFF状態、IG/ACC-OFF状態)、車両走行不能ではあるがコンビネーションメータ56を消灯したまま車両10の一部の機能のみ稼働可能とする為の電源一部オン状態(ACC-ON状態、IG-OFF状態)、コンビネーションメータ56を点灯して車両走行に係わる電源がオンにされた電源オン状態(IG-ON状態)、及び、車両走行に関わるハイブリッド制御指令信号により車両走行を制御できる状態であって、アクセルオンすれば車両10が発進・走行できる走行可能状態(READY-ON状態)の何れかに遷移可能である。上記車両10の一部の機能のみ稼働可能とすることは、例えばナビやオーディオ類64を稼働可能とする為の通電であったり、不図示のバッテリ電源取出ソケットへの通電などである。尚、上記IG-ON状態は、前記電源オン状態であるが、ハイブリッド制御指令信号により車両走行を制御する以外の他の機能は制御できる状態(例えば変速機18のシフトポジションを切替制御できる状態等)であって、エンジン12が起動せず且つ電動機Mを駆動できない状態すなわちアクセルオンとしても車両10が発進・走行できない状態である。また、上記車両電源スイッチ40の操作によってREADY-ON状態となるためには、その車両電源スイッチ40の操作以外に、READY-ON状態に切り替えられることに先立って実行されるP−ECU106自体のイニシャル処理(初期処理)や、パーキングロック装置16における初期駆動制御などでフェイルが発生しないことが条件となる。すなわち、READY-ON状態に切り替える車両電源スイッチ40の操作がなされたとしても、そのようなフェイルが発生した場合には、READY-ON状態に切り替わらずそれ以外の切替状態たとえばIG-ON状態に切り替わる。
例えば、PM−HV−ECU104は、Pポジションにあるときに、ブレーキオン状態BONで前記パワースイッチ信号の入力を検知すると、車両10の電源供給の切替状態を何れの状態からもREADY-ON状態へ切り替える。また、PM−HV−ECU104は、Pポジションにあるときに、IG-ON状態又はREADY-ON状態で車速Vが所定停止車速V’未満であり且つパワースイッチ信号の入力を検知すると、車両10の電源供給の切替状態をALL-OFF状態へ切り替える。また、PM−HV−ECU104は、Pポジションにあるときに、ブレーキオン状態BONでない状態でパワースイッチ信号の入力を検知すると、車両10の電源供給の切替状態をALL-OFF状態→ACC-ON状態→IG-ON状態→ALL-OFF状態→・・・の順でパワースイッチ信号の入力毎に切り替える。また、PM−HV−ECU104は、非Pポジションにあるときに、IG-ON状態で車速Vが所定停止車速V’未満であり且つパワースイッチ信号の入力を検知すると、パーキングロック装置16を作動させてシフトポジションを自動的にPポジションとする為のオートPロック切替要求信号をP−ECU106へ出力すると共に、Pポジションの確定後に車両10の電源供給の切替状態をALL-OFF状態へ切り替える(この一連の作動を「オートP作動」という)。上記所定停止車速V’は、例えば車両停止状態であると判断する為の予め実験的に求められて記憶された車両停止判定車速である。
また、PM−HV−ECU104は、例えば変速機18の作動を統括的に制御する。例えば、PM−HV−ECU104は、車両10の電源供給の切替状態をREADY-ON状態へ切り替えると、車両走行を可能とする為のハイブリッドシステムを起動し、車両走行に関わるハイブリッド制御指令をエンジン12、電動機M、及び変速機18へ出力して車両走行を制御する。また、PM−HV−ECU104は、シフトセンサ36及びセレクトセンサ38からの操作ポジションPSHに応じたシフトレバー位置信号に基づいてシフトポジション切換制御指令を変速機18へ出力してシフトポジションを切り替える。この際、変速機18のシフトポジションがPポジションにある場合には、PM−HV−ECU104は、上記シフトレバー位置信号に基づいて変速機18のシフトポジションをPポジションから非Pポジションへ切り替える為のP解除切替要求信号をP−ECU106へ出力する。また、PM−HV−ECU104は、Pスイッチ34からのPスイッチ信号に基づいて変速機18のシフトポジションを非PポジションからPポジションへ切り替える為のPロック切替要求信号をP−ECU106へ出力する。また、PM−HV−ECU104は、シフトポジションの状態を表示する為のシフトポジション表示信号をメータECU108へ出力する。また、PM−HV−ECU104は、P−ECU106からのPポジションであることを示すPロック状態信号に基づいてPロック状態(Pポジション)であることを表示する為のパーキングロック表示制御指令信号(Pロック表示制御指令信号)をPスイッチ34へ出力し、Pスイッチ34内のPポジションインジケータランプ62を点灯してPロック状態にあることを明示する。
ここで、蓄電装置46は、充放電可能な直流電源であり、例えばニッケル水素やリチウムイオン等の二次電池から成る。例えば、車両加速走行時やモータ走行時には、蓄電された電力がインバータ48を通して電動機Mへ供給される。また、車両減速走行時の回生制動の際には、電動機Mにより発電された電力がインバータ48を通して蓄電装置46に蓄電される。
P−ECU106は、例えばPM−HV−ECU104からのオートPロック切替要求信号やP切替要求信号(Pロック切替要求信号、P解除切替要求信号)に基づいてシフトポジションをPポジションと非Pポジションとの間で切り替える為に、パーキングロック装置16の駆動を制御してパーキングロックを作動させるか或いは解除させる。また、P−ECU106は、パーキングロック装置16からのパーキングロックの作動状態を表すP位置信号に基づいて変速機18のシフトポジションがPポジションであるか非Pポジションであるかを判断し、その判断した結果をPロック状態信号としてPM−HV−ECU104等へ出力する。
また、P−ECU106は、車両10の電源供給の切替状態がALL-OFF状態やACC-ON状態からIG-ON状態又はREADY-ON状態へ切り替えられる際には、後述するように、パーキングロック装置16における初期駆動制御を実行し、P位置信号や非P位置信号が適切に得られる為のP壁位置及び非P壁位置の検出制御を実行する。また、P−ECU106は、車両10の電源供給の切替状態がALL-OFF状態やACC-ON状態からIG-ON状態又はREADY-ON状態へ切り替えられる際の上記パーキングロック装置16における一連の初期制御を実行する前に、P−ECU106自体のイニシャル処理(初期処理)を実行する。なお、P−ECU106は、車両10の電源供給の切替状態がALL-OFF状態またはACC-ON状態である場合には非起動状態とされる一方で、その車両10の電源供給の切替状態がIG-ON状態またはREADY-ON状態である場合には起動状態とされる。P−ECU106の前記非起動状態とは例えばP−ECU106の電源が遮断されている状態であり、P−ECU106の前記起動状態とはP−ECU106の電源が投入されている状態である。
メータECU108は、現在の車速Vを表示する為の車速表示制御指令信号をコンビネーションメータ56内のスピードメータ58へ出力して、現在の車速Vを表示する。例えば、メータECU108は、車輪速センサ42から出力される車輪速パルス信号に基づいた車速パルス信号の矩形波形をカウント(計数)することによりメータ表示用車速信号Vを決定する。そして、メータECU108は、その決定したメータ表示用車速信号Vに基づいてスピードメータ58を作動させることにより該当するセグメントを点灯させて現在の車速Vを表示する。また、メータECU108は、PM−HV−ECU104から出力されるシフトポジション表示信号に基づいたシフトポジションの状態を表示する為のシフトポジション表示制御指令信号をコンビネーションメータ56内のシフトポジションインジケータ60へ出力し、現在のシフトポジションの状態をシフトポジションインジケータ60に表示する。例えば、該当するシフトポジションインジケータ60上のシフトポジションの表記位置を点灯させる。
図2は、変速機18において複数種類のシフトポジションを人為的操作により切り換える切換装置(操作装置)としてのシフト操作装置30の一例を示す図である。このシフト操作装置30は、例えば運転席の近傍に配設され、複数の操作ポジションPSHへ操作されるモーメンタリ式の操作子すなわち操作力を解くと元位置(初期位置)へ自動的に復帰する自動復帰式の操作子としてのシフトレバー32を備えている。また、本実施例のシフト操作装置30は、変速機18のシフトポジションをパーキングポジション(Pポジション)としてパーキングロックする為のモーメンタリ式の操作子としてのPスイッチ34をシフトレバー32の近傍に別スイッチとして備えている。
シフトレバー32は、図2に示すように車両の前後方向または上下方向すなわち縦方向に配列された3つの操作ポジションPSHであるR操作ポジション(R操作位置)、N操作ポジション(N操作位置)、D操作ポジション(D操作位置)と、それに平行に配列されたM操作ポジション(M操作位置)、B操作ポジション(B操作位置)とへそれぞれ操作されるようになっており、操作ポジションPSHに応じたシフトレバー位置信号をPM−HV−ECU104へ出力する。また、シフトレバー32は、R操作ポジションとN操作ポジションとD操作ポジションとの相互間で縦方向に操作可能とされ、M操作ポジションとB操作ポジションとの相互間で縦方向に操作可能とされ、更に、N操作ポジションとB操作ポジションとの相互間で上記縦方向に直交する車両の横方向に操作可能とされている。
Pスイッチ34は、例えばモーメンタリ式の押しボタンスイッチであって、ユーザにより押込み操作される毎にPスイッチ信号をPM−HV−ECU104へ出力する。例えば変速機18のシフトポジションが非PポジションにあるときにPスイッチ34が押されると、車速VがPロック許可車速Vp以下であるなどの所定の条件が満たされていれば、PM−HV−ECU104からのPロック切替要求信号に基づいてP−ECU106によりシフトポジションがPポジションとされる。このPポジションは、変速機18内の動力伝達経路が遮断され、且つ、パーキングロック装置16により駆動輪14の回転を機械的に阻止するパーキングロックが実行される駐車ポジションである。また、このPスイッチ34にはPポジションインジケータランプ62が内蔵されており、P−ECU106からのPロック状態信号がPポジションであることを示すものであれば、PM−HV−ECU104によりPポジションインジケータランプ62が点灯される。
シフト操作装置30のM操作ポジションはシフトレバー32の初期位置(ホームポジション)であり、M操作ポジション以外の操作ポジションPSH(R,N,D,B操作ポジション)へシフト操作されていたとしても、運転者がシフトレバー32を解放すればすなわちシフトレバー32に作用する外力が無くなれば、バネなどの機械的機構によりシフトレバー32はM操作ポジションへ戻るようになっている。シフト操作装置30が各操作ポジションPSHへシフト操作された際には、PM−HV−ECU104により操作ポジションPSHに対応したシフトレバー位置信号に基づいてそのシフト操作後の操作ポジションPSHに対応したシフトポジションに切り替えられると共に、現在の操作ポジションPSHすなわち変速機18のシフトポジションの状態がシフトポジションインジケータ60に表示される。
各シフトポジションについて説明すると、シフトレバー32がR操作ポジションへシフト操作されることにより選択されるRポジションは、車両を後進させる駆動力が駆動輪14に伝達される後進走行ポジションである。また、シフトレバー32がN操作ポジションへシフト操作されることにより選択されるニュートラルポジション(Nポジション)は、変速機18内の動力伝達経路が遮断されるニュートラル状態とするための中立ポジションである。また、シフトレバー32がD操作ポジションへシフト操作されることにより選択されるDポジションは、車両を前進させる駆動力が駆動輪14に伝達される前進走行ポジションである。例えば、PM−HV−ECU104は、シフトポジションがPポジションであるときに、シフトレバー位置信号に基づいて車両の移動防止(パーキングロック)を解除する所定の操作ポジションPSH(具体的には、R操作ポジション、N操作ポジション、又はD操作ポジション)へシフト操作されたと判断した場合には、ブレーキオン状態BONであるなどの所定の条件が満たされていれば、パーキングロックを解除させるP解除切替要求信号をP−ECU106へ出力する。P−ECU106は、PM−HV−ECU104からのP解除切替要求信号に基づいてパーキングロック装置16に対してパーキングロックを解除するP切換制御指令信号を出力してパーキングロックを解除させる。そして、PM−HV−ECU104は、そのシフト操作後の操作ポジションPSHに対応したシフトポジションへ切り換える。
また、シフトレバー32がB操作ポジションへシフト操作されることにより選択されるBポジションは、Dポジションにおいて例えば電動機Mに回生トルクを発生させる回生制動などによりエンジンブレーキ効果を発揮させ駆動輪14の回転を減速させる減速前進走行ポジション(エンジンブレーキレンジ)である。従って、PM−HV−ECU104は、現在のシフトポジションがDポジション以外のシフトポジションであるときにシフトレバー32がB操作ポジションへシフト操作されてもそのシフト操作を無効とし、DポジションであるときのみB操作ポジションへのシフト操作を有効とする。例えば、Pポジションであるときに運転者がB操作ポジションへシフト操作したとしてもシフトポジションはPポジションのまま継続される。
本実施例のシフト操作装置30では、シフトレバー32に作用する外力が無くなればM操作ポジションへ戻されるので、シフトレバー32の操作ポジションPSHを視認しただけでは選択中のシフトポジションを認識することは出来ない。そのため、運転者の見易い位置にシフトポジションインジケータ60が設けられており、選択中のシフトポジションがPポジションである場合も含めてシフトポジションインジケータ60に表示されるようになっている。
本実施例では所謂シフトバイワイヤ(SBW)方式を採用しており、シフト操作装置30は上記縦方向である第1方向P1とその方向P1と交差する(図2では直交する)横方向である第2方向P2とに2次元的にシフト操作されるので、その操作ポジションPSHを位置センサの検出信号として電子制御装置100に出力するために、上記第1方向P1のシフト操作を検出する第1方向検出部としてのシフトセンサ36と上記第2方向P2のシフト操作を検出する第2方向検出部としてのセレクトセンサ38とを備えている。シフトセンサ36とセレクトセンサ38との何れも操作ポジションPSHに応じた検出信号(シフトレバー位置信号)としての電圧を電子制御装置100に対し出力し、その検出信号電圧に基づき電子制御装置100は操作ポジションPSHを認識(判定)する。すなわち、上記第1方向検出部(シフトセンサ36)と第2方向検出部(セレクトセンサ38)とが全体として、シフト操作装置30の操作ポジションPSHを検出する操作ポジション検出部を構成していると言える。
操作ポジションPSHの認識について一例を示せば、シフトセンサ36の検出信号電圧VSFは、R操作ポジションを示す第1方向第1位置P1_1、M操作ポジションもしくはN操作ポジションを示す第1方向第2位置P1_2、及びB操作ポジションもしくはD操作ポジションを示す第1方向第3位置P1_3の各位置に対応する電圧レベル(例えばlow範囲、mid範囲、high範囲内の各電圧)になる。また、セレクトセンサ38の検出信号電圧VSLは、M操作ポジションもしくはB操作ポジションを示す第2方向第1位置P2_1、及びR操作ポジション、N操作ポジション、もしくはD操作ポジションを示す第2方向第2位置P2_2の各位置に対応する電圧レベル(例えばlow範囲、high範囲内の各電圧)になる。PM−HV−ECU104は、このように変化する上記検出信号電圧VSF,VSLを検出することにより、各電圧レベルの組み合わせによって操作ポジションPSH(R、N、D、M、B操作ポジション)を認識する。
図3は、駆動輪14の回転を機械的に阻止するパーキングロック装置16の構成を説明する図である。図3において、パーキングロック装置16は、Pロック機構(パーキングロック機構)66、電動のアクチュエータであるPロック駆動モータ(パーキングロック駆動モータ)68、及びエンコーダ70などを備え、電子制御装置100からの制御信号に基づき車両10の移動を防止するために作動する。
Pロック駆動モータ68は、本発明のアクチュエータに対応しており、例えばスイッチトリラクタンスモータ(SRモータ)により構成され、P−ECU106からの指令(制御信号)を受けてシフトバイワイヤシステムによってPロック機構66を駆動する。Pロック駆動モータ68には、Pロック駆動モータ68への電力供給をオン又はオフにするPモータ電源リレー(図示せず)が設けられている。そのPモータ電源リレーは、Pロック駆動モータ68への供給電圧VMRが予め定められたリレー切替電圧以下である場合には、Pロック駆動モータ68への電力供給をオフにしてPロック駆動モータ68を動作不可能にする。その一方で、上記供給電圧VMRが上記リレー切替電圧よりも高い場合には、Pロック駆動モータ68への電力供給をオンにしてPロック駆動モータ68を動作可能にする。上記リレー切替電圧は、Pロック駆動モータ68がディテントプレート74を回動させる十分なトルクを発揮し安定した動作をするように予め実験的に定められた上記供給電圧VMRに対する判定値である。
エンコーダ70は、例えばA相、B相及びZ相の信号を出力するロータリエンコーダであって、Pロック駆動モータ68と一体的に回転し、SRモータの回転状況を検知してその回転状況を表す信号すなわちPロック駆動モータ68の移動量(回転量)に応じた計数値(エンコーダカウント)を取得するためのパルス信号をP−ECU106へ供給する。P−ECU106は、エンコーダ70から供給される信号を取得してSRモータの回転状況を把握し、SRモータを駆動するための通電の制御を行う。
Pロック機構66は、Pロック駆動モータ68により回転駆動されるシャフト72、シャフト72の回転に伴って回転するディテントプレート74、ディテントプレート74の回転に伴って動作するロッド76、駆動輪14と連動して回転するパーキングギヤ78、パーキングギヤ78を回転阻止(ロック)するためのパーキングロックポール80、ディテントプレート74の回転を制限してシフトポジションを固定するディテントスプリング82、及びころ84を備えている。パーキングギヤ78は、それがロック状態とされれば駆動輪14もロック状態とされる関係にあれば設けられる場所に制限は無いが、例えば変速機18の出力歯車22に同心上に固定されている(図1参照)。
ディテントプレート74は、シャフト72を介してPロック駆動モータ68の駆動軸に作動的に連結されており、ロッド76、ディテントスプリング82、ころ84などと共にPロック駆動モータ68により駆動されてPポジションに対応するパーキングロックポジションとPポジション以外の各シフトポジション(非Pポジション)に対応する非パーキングロックポジションとを切り替えるためのパーキングロック位置決め部材として機能する。シャフト72、ディテントプレート74、ロッド76、ディテントスプリング82、及びころ84は、パーキングロック切替機構の役割を果たす。
図3は、非パーキングロックポジションすなわちシフトポジションが非Pポジションであるときの状態を示している。この状態では、パーキングロックポール80がパーキングギヤ78をロック状態としていないので、駆動輪14の回転はPロック機構66によっては妨げられない。この状態から、Pロック駆動モータ68によりシャフト72を図3に示す矢印Cの方向に回転させると、ディテントプレート74を介してロッド76が図3に示す矢印Aの方向に押され、ロッド76の先端に設けられたテーパー部材86によりパーキングロックポール80が図3に示す矢印Bの方向に押し上げられる。ディテントプレート74の回転に伴って、ディテントプレート74の頂部に設けられた2つの谷のうち一方、すなわち非パーキングロックポジション90(以下、非P位置90(図4参照))にあったディテントスプリング82のころ84は、山88を乗り越えて他方の谷、すなわちパーキングロックポジション92(以下、P位置92(図4参照))へ移る。ころ84は、その軸心を中心として回転可能にディテントスプリング82に設けられている。ころ84がP位置92に来るまでディテントプレート74が回転したとき、パーキングロックポール80は、パーキングギヤ78と噛み合う位置まで押し上げられる。これにより、パーキングギヤ78と連動して回転する駆動輪14の回転が機械的に阻止され、シフトポジションがPポジションに切り替わる。パーキングロック装置16では、Pポジションと非Pポジションとの間のシフトポジション切替時にディテントプレート74、ディテントスプリング82、シャフト72などのPロック機構66にかかる負荷を低減する為に、例えばP−ECU106はディテントスプリング82のころ84が山88を乗り越えて落ちるときの衝撃が少なくなるようにPロック駆動モータ68の回転量を制御する。なお、パーキングロック装置16では、ころ84がP位置92にある切替位置が駆動輪(車輪)14の回転を拘束するロック位置(P位置)であり、ころ84が非P位置90にある切替位置が駆動輪(車輪)14の回転を拘束しない非ロック位置(非P位置)であると言うことができる。
このように、パーキングロック装置16は、P−ECU106からの指令に基づくPロック駆動モータ68の駆動により、そのパーキングロック装置16の切替位置が前記ロック位置と前記非ロック位置とに選択的に切り替えられる。言い換えれば、パーキングロック装置16は、運転者の操作に基づいて、車輪(駆動輪14)と共に回転する回転歯としてのパーキングギヤ78をパーキングギヤ78にロック歯としてのパーキングロックポール80が噛み合うロック状態(Pロック状態)とそのロック状態が解除される非ロック状態(非Pロック状態)とに切り替える。
図4は、ディテントプレート74の構成を説明する図である。それぞれの谷において、山88から離れた側に位置する面を壁と言う。すなわち壁は、P−ECU106による以下に示す制御を行わない状態で、ディテントスプリング82のころ84が山88を乗り越えて谷に落ちるときに、ころ84とぶつかる位置に存在する。P位置92における壁を「P壁」と呼び、非P位置90における壁を「非P壁」と呼ぶ。ころ84がP位置92から非P位置90に移動する場合、P−ECU106は、非P壁94がころ84に衝突しないようにPロック駆動モータ68を制御する。具体的には、P−ECU106は、非P壁94がころ84に衝突する手前の位置でPロック駆動モータ68の回転を停止する。この位置を「非P目標回転位置」と言う。また、ころ84が非P位置90からP位置92に移動する場合、P−ECU106は、P壁96がころ84に衝突しないようにPロック駆動モータ68を制御する。具体的には、P−ECU106は、P壁96がころ84に衝突する手前の位置でPロック駆動モータ68の回転を停止する。この位置を「P目標回転位置」と言う。P−ECU106によるPロック駆動モータ68の制御により、シフトポジション切替時においてディテントプレート74、ディテントスプリング82、シャフト72などのPロック機構66にかかる負荷を大幅に低減することができる。負荷を低減することにより、Pロック機構66の軽量化、低コスト化を図ることもできる。
図5は、Pロック駆動モータ68の回転量すなわちエンコーダカウントとシフトポジションとの対応関係を説明する図である。Pロック駆動モータ68はディテントプレート74を回転駆動し、そのPロック駆動モータ68の回転量は非P壁94及びP壁96により規制される。図5に、Pロック駆動モータ68の回転制御を行う上でのP壁96の位置(P壁位置)及び非P壁94の位置(非P壁位置)を概念的に示した。このP壁位置から非P壁位置までをPロック駆動モータ68の可動回転量と言う。また、図5に示したP判定位置および非P判定位置は、いずれもシフトポジションの切替えが判定されるディテントプレート74の所定位置である。すなわち、P判定位置からP壁位置までがPポジション範囲であり、非P判定位置から非P壁位置までが非Pポジション範囲である。エンコーダ70で検出したPロック駆動モータ68の回転量がPポジション範囲にあるときには、シフトポジションがPポジションであることが判定される一方で、Pロック駆動モータ68の回転量が非Pポジション範囲にあるときには、シフトポジションが非Pポジションであることが判定される。尚、Pロック駆動モータ68の回転量がP判定位置から非P判定位置の間にあるときには、シフトポジションが不定、またはシフトポジションが切替中であることが判定される。以上の判定は、P−ECU106により実行される。
また、図5に示すように、Pポジション範囲内にP目標回転位置が設定され、非Pポジション範囲内に非P目標回転位置が設定される。P目標回転位置は、非PポジションからPポジションへの切替時に、P壁96がディテントスプリング82のころ84に衝突しない位置であり、P壁位置から所定のマージンをもって定められる。この所定のマージンは、経時変化などによるガタを考慮して余裕をもって設定される。これにより、ある程度の使用回数であれば、経時変化を吸収することができ、非PポジションからPポジションへのシフトポジション切替時におけるP壁96ところ84との衝突を回避できる。同様に、非P目標回転位置は、Pポジションから非Pポジションへの切替時に、非P壁94がディテントスプリング82のころ84に衝突しない位置であり、非P壁位置から所定のマージンをもって定められる。この所定のマージンは、経時変化などによるガタを考慮して余裕をもって設定され、ある程度の使用回数であれば、経時変化を吸収することができ、Pポジションから非Pポジションへのシフトポジション切替時における非P壁94ところ84との衝突を回避することができる。尚、非P壁位置からのマージンとP壁位置からのマージンとは同一である必要はなく、ディテントプレート74の形状などに依存して異なってもよい。
このように構成されたパーキングロック装置16において、P−ECU106はエンコーダ70により出力されたパルス信号に基づいてPロック駆動モータ68の回転量に応じたエンコーダカウントを取得する。また、P−ECU106は、例えば車両10の電源供給の切替状態がALL-OFF状態やACC-ON状態ではエンコーダカウントを零に設定し、ALL-OFF状態やACC-ON状態からIG-ON状態又はREADY-ON状態へ切り替えられたときには、その後のエンコーダ70からの信号出力に基づいて順次エンコーダカウントを更新する。尚、本実施例では、P壁位置方向への回転(図3の矢印C方向への回転)によるエンコーダカウントを負として設定する。また、P−ECU106は、取得したエンコーダカウントを予め設定された目標エンコーダカウント(目標カウント値、目標計数値)に一致させるようにPロック駆動モータ68を制御する。この目標カウント値は、例えばPロック駆動モータ68をP目標回転位置や非P目標回転位置に停止させる為の予め実験的に求められて設定された目標値である。
以上、Pロック駆動モータ68の回転量とシフトポジションとの対応関係を説明した。ところで、エンコーダ70は相対位置センサでありP−ECU106は前記非起動状態ではPロック駆動モータ68の絶対位置たとえば前記P壁位置および前記非P壁位置の情報を喪失するので、P−ECU106が非起動状態から起動状態へ切り替えられた際にはPロック駆動モータ68の絶対位置を把握する必要がある。以下に、相対的な位置情報を検出するエンコーダ70を用いて、Pロック駆動モータ68の位置制御を行う方法を具体的に説明する。
図6は、車両10の電源供給の切替状態をALL-OFF状態やACC-ON状態からIG-ON状態に切り替える車両電源スイッチ40のスイッチ操作がなされて、P−ECU106が非起動状態から起動状態へ切り替えられた際のパーキングロック装置16における一連の初期制御を説明する状態遷移図である。図6において、PM−HV−ECU104により車両10の電源供給の切替状態がALL-OFF状態やACC-ON状態からIG-ON状態に切り替えられると[状態A]、P−ECU106は非起動状態から起動状態へ切り替えられ、Pロック駆動モータ68のリレー(Pモータ電源リレー)が繋がるのを待つ期間として初期待機を行う[状態B]。この状態Bでは、例えばP−ECU106はP−ECU106自体のイニシャル処理を行う。続いて、P−ECU106は、Pロック駆動モータ68の回転を適切に制御する為に、Pロック駆動モータ68の励磁合わせ(位相合わせ)などのPロック駆動モータ68の初期駆動制御を行う[状態C]。続いて、P−ECU106は、Pロック駆動モータ68の前記P壁位置、または非P壁位置を検出して、基準位置を設定する[状態D]。P−ECU106は、基準位置を設定した後は、例えばユーザによるPスイッチ34の操作またはシフト操作に基づくパーキングロックの作動や解除を実行する通常制御を行う[状態E]。なお、車両10の電源供給の切替状態をREADY-ON状態に切り替える車両電源スイッチ40のスイッチ操作がなされた場合において、この状態Eにまで遷移する過程でフェイル(例えばPロック駆動モータ68が動作しない等)が発生した場合には、READY-ON状態に切り替えられないことがあるが、この点は図11,12等を用いて後述する。以下に、上記(状態D)におけるP壁位置及び非P壁位置を検出する制御方法を説明する。
図7は、P壁位置を検出する制御方法を説明するための図である。P−ECU106は、P壁位置検出制御では、先ず、Pロック駆動モータ68を駆動させてディテントプレート74を図3に示す矢印Cの方向、すなわちP壁96がディテントスプリング82のころ84に向かう方向に回転させ、ころ84とP壁96とを接触させる。P壁96は、P位置92においてすなわち所定のシフトポジションとしてのPポジションにおいて、Pロック駆動モータ68の所定方向としての図3に示す矢印Cの方向の回転を規制する規制部材として機能する。尚、P壁96は、ディテントスプリング82及びころ84と協同して規制部材を構成してもよい。図7において、矢印F1はPロック駆動モータ68による回転力、矢印F2はディテントスプリング82によるバネ力、矢印F3はロッド76による押し戻し力を示す。点線で示すディテントプレート74’は、P壁96ところ84とが接触した位置を示す。従って、ディテントプレート74’の位置を検出することが、P壁96の位置を検出することに相当する。
ディテントプレート74は、P壁96ところ84との接触後も、点線で示す位置から、Pロック駆動モータ68の回転力F1により図3に示す矢印Cの方向に、ディテントスプリング82のバネ力に抗して回転される。これによりディテントスプリング82に撓みが生じて、バネ力F2が増加し、またロッド76による押し戻し力F3も増加する。回転力F1が、バネ力F2及び押し戻し力F3と釣り合ったところで、ディテントプレート74の回転が停止する。
P−ECU106は、取得したエンコーダカウントに基づいてディテントプレート74の回転停止を判定する。例えば、P−ECU106は、エンコーダカウントの最小値又は最大値が所定時間変化しない場合に、ディテントプレート74及びPロック駆動モータ68の回転停止を判定する。エンコーダカウントの最小値又は最大値の何れを監視するかは、エンコーダ70に応じて設定されればよく、何れにしても最小値又は最大値が所定時間変化しないことは、ディテントプレート74が動かなくなった状態を示す。
P−ECU106は、回転停止時のディテントプレート74の位置を暫定的なP壁位置(以下、「暫定P壁位置」と言う)として検出し、更に、ディテントスプリング82の撓み量又は撓み角を算出する。この撓み量又は撓み角の算出は、例えばP−ECU106に予め記憶されているPロック駆動モータ68への印加電圧(供給電圧VMR)に対応する撓み量又は撓み角の関係を示すマップを用いて行われる。P−ECU106は、そのマップから暫定P壁位置検出時のPロック駆動モータ68への印加電圧に対応する撓み量又は撓み角を算出する。尚、Pロック駆動モータ68の印加電圧の代わりに、蓄電装置46の電圧VBATを用いたマップであってもよい。蓄電装置46の電圧VBATは例えばP−ECU106により監視されており、容易に検出することができる。尚、この場合は、蓄電装置46からPロック駆動モータ68までのワイヤーハーネスなどによる電圧降下分を考慮して、マップが作成されることになる。
P−ECU106は、このマップを用いて算出した撓み量又は撓み角から暫定P壁位置をマップ補正し、マップ補正した位置をP壁位置として確定する。このとき、P−ECU106は、確定したP壁位置において、エンコーダカウントをCNTPに設定する。そして、P−ECU106は、エンコーダカウントを零にするように、Pロック駆動モータ68を駆動させてディテントプレート74を図3に示す矢印Dの方向、すなわちP壁96がディテントスプリング82のころ84から離反する方向に回転させ、ディテントプレート74の位置を所定のP位置とする。この所定のP位置は、Pポジション範囲において予め設定された所定位置であって、確定されたP壁位置とのエンコーダカウント差がCNTPとなるように設定されている。また、この所定のP位置をP目標回転位置としても良い。このように、P壁位置を確定することによりP目標回転位置を設定することができる。尚、印加電圧に対応する撓み量又は撓み角の関係を示すマップの代わりに、Pロック駆動モータ68の出力トルクに対応する撓み量又は撓み角の関係を示すマップであってもよいし、マップを用いて算出する代わりに、撓み量又は撓み角を検出するセンサを設け、それにより検出するようにしてもよい。
図8は、非P壁位置を検出する制御方法を説明するための図である。P−ECU106は、非P壁位置検出制御では、先ず、Pロック駆動モータ68を駆動させてディテントプレート74を図3に示す矢印Dの方向、すなわち非P壁94がディテントスプリング82のころ84に向かう方向に回転させ、ころ84と非P壁94とを接触させる。非P壁94は、非P位置90においてすなわち所定のシフトポジションとしての非Pポジションにおいて、Pロック駆動モータ68の所定方向としての図3に示す矢印Dの方向の回転を規制する規制部材として機能する。尚、非P壁94は、ディテントスプリング82及びころ84と協同して規制部材を構成してもよい。図8において、矢印F1はPロック駆動モータ68による回転力、矢印F2はディテントスプリング82によるバネ力、矢印F3はロッド76による引っ張り力を示す。点線で示すディテントプレート74”は、非P壁94ところ84とが接触した位置を示す。従って、ディテントプレート74”の位置を検出することが、非P壁94の位置を検出することに相当する。
ディテントプレート74は、非P壁94ところ84との接触後も、点線で示す位置から、Pロック駆動モータ68の回転力F1により図3に示す矢印Dの方向に、ディテントスプリング82の引っ張り力に抗して回転される。これによりディテントスプリング82に伸びが生じて、バネ力F2が増加し、またロッド76による引っ張り力F3も増加する。回転力F1が、バネ力F2及び引っ張り力F3と釣り合ったところで、ディテントプレート74の回転が停止する。
P−ECU106は、取得したエンコーダカウントに基づいてディテントプレート74の回転停止を判定する。例えば、P−ECU106は、エンコーダカウントの最小値又は最大値が所定時間変化しない場合に、ディテントプレート74及びPロック駆動モータ68の回転停止を判定する。
P−ECU106は、回転停止時のディテントプレート74の位置を暫定的な非P壁位置(以下、「暫定非P壁位置」と言う)として検出し、更に、ディテントスプリング82の伸び量を算出する。この伸び量の算出は、例えばP−ECU106に予め記憶されているPロック駆動モータ68への印加電圧に対応する伸び量の関係を示すマップを用いて行われる。P−ECU106は、そのマップから暫定非P壁位置検出時のPロック駆動モータ68への印加電圧に対応する伸び量を算出する。
P−ECU106は、このマップを用いて算出した伸び量から暫定非P壁位置をマップ補正し、マップ補正した位置を非P壁位置として確定する。このとき、P−ECU106は、確定した非P壁位置において、エンコーダカウントをCNTCPに設定する。そして、P−ECU106は、エンコーダカウントを所定計数値だけ減少させたエンコーダカウントCPとするように、Pロック駆動モータ68を駆動させてディテントプレート74を図3に示す矢印Cの方向、すなわち非P壁94がディテントスプリング82のころ84から離反する方向に回転させ、ディテントプレート74の位置を所定の非P位置とする。この所定の非P位置は、非Pポジション範囲において予め設定された所定位置であって、確定された非P壁位置とのエンコーダカウント差が所定計数値となるように設定されている。また、この所定の非P位置を非P目標回転位置としても良い。このように、非P壁位置を確定することにより非P目標回転位置を設定することができる。尚、印加電圧に対応する伸び量の関係を示すマップの代わりに、Pロック駆動モータ68の出力トルクに対応する伸び量の関係を示すマップであってもよいし、マップを用いて算出する代わりに、伸び量を検出するセンサを設け、それにより検出するようにしてもよい。
このように、車両10の電源供給の切替状態がIG-ON状態とされたP−ECU106の起動状態では、Pロック駆動モータ68の移動(回転)が規制される方向にPロック駆動モータ68を移動するとき、取得されたエンコーダカウントに基づいて所定のシフトポジションに対応したPロック駆動モータ68の壁位置を検出して、基準位置を設定することができる。
図9は、Pロック駆動モータ68に印加する通電指令パルスの波形を説明する図である。シフトポジション切替えの通常制御時は、通電指令パルスとしてハイ期間の長い信号をPロック駆動モータ68に印加する。一方、P−ECU106による壁位置検出制御時には、通電指令パルスとして、Pロック駆動モータ68の単位時間当たりの出力を、シフトポジション切替えの通常制御時におけるPロック駆動モータ68の単位時間当たりの出力よりも小さくする信号をPロック駆動モータ68に印加する。具体的には、Pロック駆動モータ68に印加する通電指令パルスのオン幅を小さくする。壁位置検出制御時のPロック駆動モータ68の回転速度を遅くすることにより、壁(非P壁94、P壁96)ところ84との衝撃を低減できる。尚、例えば図9に示す通電指令パルスがオン且つPロック駆動モータ68におけるUVW三相の通電指令がオンであるときに、UVW三相のそれぞれの相に通電される。
以上のように、車両10の電源供給の切替状態をIG-ON状態またはREADY-ON状態に切り替える車両電源スイッチ40のスイッチ操作がなされたときには、すなわちP−ECU106の非起動状態から起動状態への切替え時には、P−ECU106自体のイニシャル処理が実行された後、パーキングロック装置16における初期制御が実行されて壁位置が検出される。すなわち、パーキングロック装置16における初期制御として、Pロック駆動モータ68の初期駆動制御が行われ、続いて、Pロック駆動モータ68の前記P壁位置及び非P壁位置が検出されて基準位置が設定される。つまり、検出された前記P壁位置及び非P壁位置に基づくPロック駆動モータ68の実可動回転量(実際の可動回転量)は2つの壁位置の間の範囲であって、一方のシフトポジションにおける壁位置検出制御を行って壁位置を検出した後、他方のシフトポジションにおける壁位置検出制御を行って他方の壁位置を検出することで測定することができる。そして、壁位置を検出することでPロック駆動モータ68の絶対位置が把握できるので、目標回転位置を設定することができる。
ところで、前記壁位置検出制御に先立って実行されるPロック駆動モータ68の前記初期駆動制御などにおいて、例えば、P−ECU106は、Pロック駆動モータ68が動作不可能であることを検出すると、モータ故障であると認識し、基本的に、Pロック駆動モータ68を駆動する必要がある前記壁位置検出制御を実行せずに、車両10の電源供給の切替状態がREADY-ON状態に遷移することを禁止する。ここで、Pロック駆動モータ68が動作不可能になる場合としては、そのPロック駆動モータ68自体のハード的な故障の他に、Pロック駆動モータ68への供給電圧VMR(以下、「Pモータ供給電圧VMR」という)がPロック駆動モータ68を動作させるのに必要な最低限の電圧(例えば前記リレー切替電圧)を下回って低下した場合などが考えられる。例えば、上記Pモータ供給電圧VMRが低下したことによりPロック駆動モータ68が動作不可能となりそれがP−ECU106に検出される場合を図10を用いて説明できる。
図10は、P−ECU106の起動状態においてエンジン12が作動させられておらずに放置される等して、Pモータ供給電圧VMRであるバッテリ電圧が12Vから次第に低下する場合を例としたタイムチャートである。なお、図10中に記載のPモータとはPロック駆動モータ68のことである。
図10のt1時点では、低下しているPモータ供給電圧VMRが、前記リレー切替電圧(例えば6.6V)に達している。従って、t1時点以降では、前記Pモータ電源リレーがPロック駆動モータ68への電力供給をオフにし、Pロック駆動モータ68は動作不可能になる。
そして、t1時点からPモータ供給電圧VMRは更に低下し、ノイズ等による瞬断によってt2時点とt3時点との間でP−ECU106の起動状態を維持できる最低電圧であるECU停止電圧(例えば5.8V)を下回り、P−ECU106はそのt2時点とt3時点との間で一時的に非起動状態(ECU停止)になっている。そして、t3時点以降ではPモータ供給電圧VMRは上記ECU停止電圧以上に回復しているのでP−ECU106は再び起動状態になっている。
P−ECU106が非起動状態から起動状態に切り替わった後に、t4時点で、Pモータ供給電圧VMRが、前記ECU停止電圧より高く且つ前記リレー切替電圧より低く設定されたPロック駆動モータ68の動作診断をする診断電圧(例えば6.0V)以上になっているので、P−ECU106は、Pロック駆動モータ68の動作診断を行う、すなわち、Pロック駆動モータ68が動作可能か否かを判定する。そうすると、図10において、t4時点以降で、Pモータ供給電圧VMRが前記リレー切替電圧以下であるのでPロック駆動モータ68は動作せず、P−ECU106は、Pロック駆動モータ68が動作不可能であると判定する。すなわち、P−ECU106が非起動状態から起動状態に切り替わった後のPモータ供給電圧VMRが、図10の斜線部A01に示すように、上記診断電圧以上であって上記リレー切替電圧以下である範囲内にある場合には、Pロック駆動モータ68自体のハード的な故障でなくても、Pモータ供給電圧VMRの低下に起因してPロック駆動モータ68が動作不可能であると判定される。
このように、Pモータ供給電圧VMRの低下に起因してPロック駆動モータ68が動作不可能となっている場合には、例えばバッテリが外部から充電されるなどしてPモータ供給電圧VMRが回復すればPロック駆動モータ68が動作可能になることがある。本実施例では、P−ECU106は、Pロック駆動モータ68が動作不可能であると一旦判定しても、Pモータ供給電圧VMRが回復(上昇)すれば、READY-ON状態に遷移可能とする。以下に、その制御機能の要部を説明する。
図11は、P−ECU106に備えられた制御機能の要部を説明する機能ブロック線図である。図11に示すように、P−ECU106は、供給電圧検出判断手段130、アクチュエータ動作判定手段132、乗員操作判断手段134、アクチュエータ駆動許可手段136、壁位置検出制御手段138、及び車両走行許可手段140を備えている。
供給電圧検出判断手段130は、P−ECU106が非起動状態から起動状態へ切り替えられた場合には、その時からPモータ供給電圧VMRを逐次検出する。そして、供給電圧検出判断手段130は、そのPモータ供給電圧VMRが予め定められた供給電圧判定値V1MR以上であるか否かを判断する、言い換えれば、Pモータ供給電圧VMRが供給電圧判定値V1MR未満であるか否かを判断する。その供給電圧判定値V1MRは、Pモータ供給電圧VMRの下限値であって、例えば、前記リレー切替電圧よりも高いPロック駆動モータ68の正常な動作が保証される下限電圧である保証電圧(例えば8V)に設定されている。
例えば、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満であれば、供給電圧検出判断手段130は、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満であると判断する。その後、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になったとすれば、供給電圧検出判断手段130は、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になったと判断する。
アクチュエータ動作判定手段132は、Pロック駆動モータ68が動作可能であるか否かを判定するフェイル状態判定を行う。具体的に、アクチュエータ動作判定手段132は、上記フェイル状態判定を、P−ECU106が非起動状態から起動状態へ切り替えられた場合に、例えば図6の状態Cにおいて行う。また、アクチュエータ動作判定手段132は、上記フェイル状態判定でPロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合にも、上記フェイル状態判定を行う。上記Pモータ供給電圧VMRが上記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になったか否かは、前記供給電圧検出判断手段130によって判断される。前記フェイル状態判定に関し、アクチュエータ動作判定手段132は、例えば、Pロック駆動モータ68を図3の矢印C,Dの両方向それぞれに所定量回転させる指令をし、Pロック駆動モータ68の回転に応じてエンコーダ70から出力されるパルス信号を何れの回転方向でも検出できなければ、Pロック駆動モータ68が動作不可能であると判定する。また、その他の方法やセンサ等を用いて、Pロック駆動モータ68が動作可能であるか否かを判定してもよい。
乗員操作判断手段134は、予め定められた乗員による操作がなされたか否かを判断する。その予め定められた乗員による操作とは、具体的には、車両10を走行可能な状態に切り替える操作、すなわち、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替える操作(以下、「走行可能化操作」という)である。この操作がなされたか否かは、PM−HV−ECU104から取得される。
アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作可能であると判定した場合には、Pロック駆動モータ68の駆動を許可する。この許可によりPロック駆動モータ68を駆動させることが可能となる。一方、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した場合には、Pロック駆動モータ68の駆動を禁止する。この禁止によりPロック駆動モータ68を駆動させることができなくなる。
また、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した場合でも、その後、Pロック駆動モータ68の駆動を許可することがある。具体的には、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合には、Pロック駆動モータ68の駆動を許可する。このとき、アクチュエータ駆動許可手段136は、一旦、Pロック駆動モータ68の駆動を禁止した後に上記許可をすることになるので、その禁止と許可との錯綜を避けるため、その禁止を解除してからその許可をする。
上記のように、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合には、Pロック駆動モータ68の駆動を許可するが、更に、その許可をするための条件を増やしてもよい。例えば、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった後の再度の前記フェイル状態判定でアクチュエータ動作判定手段132がPロック駆動モータ68が動作可能であると判定した場合に限り、アクチュエータ駆動許可手段136は、Pロック駆動モータ68の駆動を許可するとしてもよい。また、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった後に前記走行可能化操作がなされたことを条件に、アクチュエータ駆動許可手段136は、Pロック駆動モータ68の駆動を許可するとしてもよい。また、それらの条件を組み合わせて、Pロック駆動モータ68の駆動を許可するとしてもよい。上記Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になったか否かは前記供給電圧検出判断手段130によって判断され、上記走行可能化操作がなされたか否かは前記乗員操作判断手段134によって判断される。
壁位置検出制御手段138は、P−ECU106が非起動状態から起動状態へ切り替えられた場合において、アクチュエータ駆動許可手段136がPロック駆動モータ68の駆動を許可すると、前記P壁位置検出制御および前記非P壁位置検出制御を実行し、前記P壁位置と前記非P壁位置とを検出する。一方で、壁位置検出制御手段138は、アクチュエータ駆動許可手段136がPロック駆動モータ68の駆動を禁止していれば、前記P壁位置検出制御および前記非P壁位置検出制御を実行しない。
車両走行許可手段140は、壁位置検出制御手段138が前記P壁位置および前記非P壁位置の検出を完了すると、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替えることを、PM−HV−ECU104に対して許可する。その許可がなされると、PM−HV−ECU104は、前記走行可能化操作がなされれば或いは既に前記走行可能化操作がなされていれば、上記車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替える。すなわち、アクチュエータ駆動許可手段136がPロック駆動モータ68の駆動を許可した場合に、上記走行可能化操作がなされていれば、上記車両10の電源供給の切替状態が前記走行可能状態(READY-ON状態)に切り替えられることになる。
一方、車両走行許可手段140は、アクチュエータ駆動許可手段136がPロック駆動モータ68の駆動を禁止した場合には、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替えることを、PM−HV−ECU104に対して許可しない。その許可がなされないので、PM−HV−ECU104は、上記車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)には切り替えない。例えば、前記走行可能化操作がなされていた場合には、その切替状態を上記走行可能状態(READY-ON状態)にはせずに前記電源オン状態(IG-ON状態)にする。
図12は、本実施例のP−ECU106の制御作動の要部、すなわち、Pロック駆動モータ68の駆動を禁止しまたは許可する制御作動を説明するフローチャートである。このフローチャートは、単独で或いは他の制御作動と並列的に実行されるものである。また、このフローチャートは、例えば、P−ECU106が非起動状態から起動状態へ切り替わった場合に実行される。P−ECU106が非起動状態から起動状態へ切り替わる場合としては、例えば図13に示すように、車両電源スイッチ40のスイッチ操作によって車両10の電源供給の切替状態がALL-OFF状態またはACC-ON状態からIG-ON状態に切り替えられた場合、或いは、Pモータ供給電圧VMRがある程度低下しておりノイズ等によりP−ECU106が瞬断されその瞬断後にPモータ供給電圧VMRが前記ECU停止電圧以上に回復した場合(図10のタイムチャート参照)などが挙げられる。なお、図13に記載の補機電圧とは、エアコンやナビやオーディオ類64などの補機に供給される電圧であり、本実施例では前記バッテリ電圧であるので、前記Pモータ供給電圧VMRと同じである。
図12では、P−ECU106が非起動状態から起動状態へ切り替わると、ステップ(以下、ステップを省略する)SA1に移る。そのSA1においては、Pモータ供給電圧VMRが逐次検出され記憶される。このPモータ供給電圧VMRの検出等はこのSA1から開始されそれ以降も継続する。SA1の次はSA2へ移る。このSA1は供給電圧検出判断手段130に対応する。
SA2においては、Pロック駆動モータ68が動作可能であるか否かを判定する前記フェイル状態判定が行われる。このSA2の判定が肯定された場合、すなわち、Pロック駆動モータ68が動作可能である場合には、SA3に移る。一方、このSA2の判定が否定された場合には、SA7に移る。このSA2はアクチュエータ動作判定手段132に対応する。
SA3においては、Pロック駆動モータ68の駆動が許可される。SA3の次はSA4へ移る。SA3はアクチュエータ駆動許可手段136に対応する。
SA4においては、前記P壁位置検出制御および前記非P壁位置検出制御が実行され、前記P壁位置および前記非P壁位置が検出される。前記P壁位置および前記非P壁位置の検出(壁当て学習)が完了するとSA5に移る。SA4は壁位置検出制御手段138に対応する。
SA5においては、車両10の電源供給の切替状態をREADY-ON状態に切り替える乗員による操作(走行可能化操作)、すなわち、乗員によるスタートスイッチ操作が実施されたか否かが判断される。P−ECU106の起動状態への切替時に上記スタートスイッチ操作が実施されていてもSA5の判断は肯定される。このSA5の判断が肯定された場合、すなわち、上記スタートスイッチ操作が実施された場合に、SA6に移る。SA5は乗員操作判断手段134に対応する。
SA6においては、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替えることが、PM−HV−ECU104に対して許可される。その許可により、PM−HV−ECU104は、上記切替状態を前記走行可能状態(READY-ON状態)に切り替える。SA6は車両走行許可手段140に対応する。
SA7においては、Pロック駆動モータ68が異常状態(フェイル状態)であると判定される。そして、Pロック駆動モータ68の駆動が禁止される。SA7はアクチュエータ駆動許可手段136に対応する。SA7の次はSA8へ移る。
SA8においては、Pモータ供給電圧VMRが低下(不足)しているか否か、具体的には、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満であるか否かが判断される。このSA8の判断が肯定された場合、すなわち、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満である場合には、前記SA2にてPロック駆動モータ68が動作不可能であると判定された原因が上記Pモータ供給電圧VMRの低下にあると考えられ、SA9に移る。一方、このSA8の判断が否定された場合には、上記原因が上記Pモータ供給電圧VMRに問題は無くPロック駆動モータ68自体のハード的な故障にあると考えられ、SA16に移る。SA8は供給電圧検出判断手段130に対応する。
SA9においては、「低電圧によるPロック駆動モータ68の異常(フェイル)発生」という履歴を残す。SA9の次はSA10へ移る。
SA10においては、Pモータ供給電圧VMR(=補機電圧)が供給電圧判定値V1MR以上に復帰したか否かが判断される。Pモータ供給電圧VMRが供給電圧判定値V1MR以上に復帰すれば、SA11に移る。SA10は供給電圧検出判断手段130に対応する。
SA11においては、乗員による前記スタートスイッチ操作(走行可能化操作)が、上記SA10の判断の肯定後、すなわち、Pモータ供給電圧VMRが供給電圧判定値V1MR以上に復帰した後おいて実施されたか否かが判断される。このSA11の判断が肯定された場合、すなわち、上記スタートスイッチ操作が上記SA10の判断の肯定後に実施された場合に、SA12に移る。SA11は乗員操作判断手段134に対応する。
SA12においては、前記SA7にてなされたPロック駆動モータ68が異常状態であるとの異常判定が解除(クリア)される。そして、Pロック駆動モータ68の駆動禁止が解除される。SA12はアクチュエータ駆動許可手段136に対応する。SA12の次はSA13へ移る。
SA13においては、Pロック駆動モータ68が動作可能であるか否かを判定する前記フェイル状態判定が行われる。既にSA2にてそのフェイル状態判定は一度行われているので、このSA13にて行われるフェイル状態判定は、再度のフェイル状態判定であると言える。このSA13の判定が肯定された場合、すなわち、Pロック駆動モータ68が動作可能である場合には、SA14に移る。一方、このSA13の判定が否定された場合には、SA16に移る。このSA13はアクチュエータ動作判定手段132に対応する。
SA14においては、Pロック駆動モータ68の駆動が許可される。SA14の次はSA15へ移る。SA14はアクチュエータ駆動許可手段136に対応する。
SA15においては、前記P壁位置検出制御および前記非P壁位置検出制御が実行され、前記P壁位置および前記非P壁位置が検出される。前記P壁位置および前記非P壁位置の検出(壁当て学習)が完了するとSA6に移る。SA15は壁位置検出制御手段138に対応する。
SA16においては、Pロック駆動モータ68自体のハード的な故障すなわちモータ故障であると判定される。そして、Pロック駆動モータ68の駆動が禁止され、既にPロック駆動モータ68の駆動が禁止されているのであればその禁止が継続される。SA16はアクチュエータ駆動許可手段136に対応する。SA16の次はSA17へ移る。
SA17においては、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替えることが、PM−HV−ECU104に対して許可されない。その許可がなされないので、PM−HV−ECU104は、上記車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)には切り替えない。例えば、その切替状態を前記電源オン状態(IG-ON状態)のままにする。SA17は車両走行許可手段140に対応する。
図14は、図12で説明した制御作動と対比するため、従来技術におけるP−ECUの制御作動の要部を説明するためのフローチャートである。このフローチャートも図12と同様に、例えば図13に示すようにして、P−ECUが非起動状態から起動状態へ切り替わった場合に実行される。
図14のSB1においては、Pロック駆動モータ68が動作可能であるか否かが判定され、Pロック駆動モータ68が動作可能であればSB2〜SB4が実行される。一方で、Pロック駆動モータ68が動作不可能であればSB5〜SB7が実行される。
SB2においては、図12のSA4と同様に前記壁当て学習が行わる。その壁当て学習が完了すると、SB3において、図12のSA5と同様に、前記スタートスイッチ操作が実施されたか否かが判断される。そして、そのSB3の判断が肯定されると、SB4において、車両10の電源供給の切替状態をREADY-ON状態に切り替えることが、PM−HV−ECU104に対して許可される。その許可により、PM−HV−ECU104は、上記切替状態をREADY-ON状態に切り替える。
一方、SB5においては、図12のSA7と同様にPロック駆動モータ68が異常状態(フェイル状態)であると判定され、続くSB6においては、図12のSA16と同様に前記モータ故障であると判定される。そして、SB7においては、車両10の電源供給の切替状態をREADY-ON状態に切り替えることが、PM−HV−ECU104に対して許可されない。その許可がなされないので、PM−HV−ECU104は、前記スタートスイッチ操作が実施されたとしても、上記車両10の電源供給の切替状態をREADY-ON状態には切り替えない。例えば、その切替状態をIG-ON状態のままにする。
このように、図14に示す従来技術では、一旦、Pロック駆動モータ68が動作不可能であると判定されると、その後Pモータ供給電圧VMRの回復によりPロック駆動モータ68が動作可能になったとしても、P−ECUを再起動しない限り、車両10の電源供給の切替状態をREADY-ON状態には切り替えることができないという問題点があった。しかし、図12に示す本実施例の制御作動では、そのような従来技術の問題点が解消されている。
本実施例によれば、アクチュエータ動作判定手段132は、Pロック駆動モータ(アクチュエータ)68が動作可能であるか否かを判定する前記フェイル状態判定を行う。そして、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合には、Pロック駆動モータ68の駆動を許可する。ここで、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上に回復したとすれば、その回復前になされたPロック駆動モータ68が動作不可能であるとの判定はPモータ供給電圧VMRの低下に起因するものと考えられ、また、そのPモータ供給電圧VMRの回復後にはPロック駆動モータ68が動作可能な状態になっているものと考えられる。従って、Pロック駆動モータ68が動作不可能と判定された場合において、その後にPロック駆動モータ68が動作可能になる場合、具体的にはPモータ供給電圧VMRが回復する場合を加味して適切な処理を行うことができる。このような適切な処理を行うことにより、運転者の快適性を損なう機会を抑制できる。なお、適切な処理とは、例えば、Pロック駆動モータ68が動作可能である場合にはそのPロック駆動モータ68が動作可能であることを前提として正常時のPロック駆動モータ68の制御をすること等である。一方、不適切な処理とは、Pロック駆動モータ68が動作可能である場合にそれが動作不可能であると認識してそのPロック駆動モータ68を動作させない等のフェイル時の処理をすることである。
また、本実施例によれば、供給電圧判定値V1MRはPモータ供給電圧VMRの下限値であるので、Pロック駆動モータ68が動作不可能と判定された場合においてその原因がPモータ供給電圧VMRの低下によるものであることを、より適切に判断できる。
また、本実施例によれば、アクチュエータ動作判定手段132は、前記フェイル状態判定でPロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合には、上記フェイル状態判定を再度行う。そして、その再度のフェイル状態判定でアクチュエータ動作判定手段132がPロック駆動モータ68が動作可能であると判定した場合に限り、アクチュエータ駆動許可手段136は、Pロック駆動モータ68の駆動を許可するとしてもよい。そのようにしたとすれば、Pモータ供給電圧VMRが供給電圧判定値V1MR以上に回復したことによりPロック駆動モータ68が動作可能になったことを確実に認識した上で、Pロック駆動モータ68の駆動を許可することが可能である。
また、本実施例によれば、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した後に、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった場合には、Pモータ供給電圧VMRが前記供給電圧判定値V1MR未満から供給電圧判定値V1MR以上になった後に前記走行可能化操作がなされたことを条件に、アクチュエータ駆動許可手段136は、Pロック駆動モータ68の駆動を許可するとしてもよい。そのようにしたとすれば、Pロック駆動モータ68が駆動するとしてもそれは乗員による操作の後であるので、例えば乗員がPロック駆動モータ68の動作不可能を認識しているときに、その乗員に違和感を生じさせることを回避できる。
また、本実施例によれば、乗員操作判断手段134によって操作の有無が判断される予め定められた乗員による操作とは、車両10の電源供給の切替状態を前記走行可能状態(READY-ON状態)に切り替える操作(走行可能化操作)であるので、その走行可能化操作は車両走行を開始するには必要な操作であり、Pロック駆動モータ68の駆動を許可する際に乗員による特別な操作が必要とされないという利点がある。
また、本実施例によれば、アクチュエータ駆動許可手段136は、アクチュエータ動作判定手段132が前記フェイル状態判定で、Pロック駆動モータ68が動作不可能であると判定した場合には、Pロック駆動モータ68の駆動を禁止する。また、アクチュエータ駆動許可手段136は、Pロック駆動モータ68の駆動を禁止した後にそのPロック駆動モータ68の駆動を許可する場合には、その禁止を解除してからその許可をする。従って、Pロック駆動モータ68の駆動を禁止することと許可することとが錯綜するのを回避できる。
また、本実施例によれば、図12のSA2においてPロック駆動モータ68が動作不可能であると判定された後に、SA8において、Pモータ供給電圧VMRが低下(不足)しているか否かが判断されるので、上記SA2にてPロック駆動モータ68が動作不可能であると判定された原因が、上記Pモータ供給電圧VMRの低下にあるのか、または、Pロック駆動モータ68自体のハード的な故障にあるのかを正しく判定できる。
また、本実施例によれば、図12のSA10においてPモータ供給電圧VMRが供給電圧判定値V1MR以上に復帰したと判断された後にSA13で再度のフェイル状態判定が行われるので、例えば、上記Pモータ供給電圧VMRに拘わらず、その再度のフェイル状態判定を定期的に行ってPロック駆動モータ68が動作可能であるか否かを判定する場合などと比較して、Pロック駆動モータ68等にかける負担が軽減される。
また、本実施例によれば、図12のSA8でもSA10でも、Pモータ供給電圧VMRに対する判定値は供給電圧判定値V1MRで共通しているので、それぞれのステップで別個の判定値を設定する必要がない。
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
例えば、前述の実施例において、Pロック駆動モータ68等に電力供給するバッテリは、蓄電装置46に含まれていてもよいし、蓄電装置46とは別個の電源として車両10に設けられていてもよい。
また、前述の実施例において、供給電圧判定値V1MRは、Pロック駆動モータ68の前記保証電圧に設定されているが、それ以外の電圧値が設定されていてもよく、例えば、Pロック駆動モータ68に電力供給する下限電圧である前記リレー切替電圧に設定されていても差し支えない。
また、前述の実施例において、乗員操作判断手段134によって判断される予め定められた乗員による操作は、前記走行可能化操作であると説明されているが、それに限定されるわけではなく、乗員による他の操作であっても差し支えない。
また、前述の実施例において、PM−HV−ECU104は、Pポジションにあるときに、ブレーキオン状態BONで前記パワースイッチ信号の入力を検知すると、車両10の電源供給の切替状態を何れの状態からもREADY-ON状態へ切り替えることが例示されているが、このREADY-ON状態へ切り替える乗員による操作に替えて或いはこの操作と共にこれ以外の乗員による操作によってREADY-ON状態へ切り替えても差し支えない。
また、前述の実施例において、図12のフローチャートのSA11は、SA14よりも前に設けられているが、そのSA11がSA14よりも前ではなくSA14とSA6との間に設けられているフローチャートも考え得る。
また、前述の実施例において、図12のフローチャートにSA13が設けられているが、そのSA13が設けられておらずにSA12の次にはSA14へ移るフローチャートも考え得る。
また、前述の実施例において、図12のフローチャートにSA9が設けられているが、このSA9は無くても差し支えない。
また、前述の実施例において、アクチュエータ動作判定手段132は、前記フェイル状態判定を、P−ECU106が非起動状態から起動状態へ切り替えられた場合などに行うことが例示されているが、それ以外の場合、例えばPM−HV−ECU104又はP−ECU106が何らかのフェイルを検出した場合においても、前記フェイル状態判定を行うこととしても差し支えない。また、所定の時間間隔を空けて定期的に前記フェイル状態判定を行っても差し支えない。
なお、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
10:車両
14:駆動輪(車輪)
16:パーキングロック装置
68:Pロック駆動モータ(アクチュエータ)
106:P−ECU(車両用シフト制御装置)
14:駆動輪(車輪)
16:パーキングロック装置
68:Pロック駆動モータ(アクチュエータ)
106:P−ECU(車両用シフト制御装置)
Claims (6)
- 電動のアクチュエータの駆動により、車輪の回転を拘束するロック位置と該車輪の回転を拘束しない非ロック位置とに選択的に切り替えられるパーキングロック装置を備えた車両において、前記アクチュエータが動作可能であるか否かを判定するフェイル状態判定を行う車両用シフト制御装置であって、
前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が予め定められた供給電圧判定値未満から該供給電圧判定値以上になった場合には、前記アクチュエータの駆動を許可する
ことを特徴とする車両用シフト制御装置。 - 前記供給電圧判定値は、前記アクチュエータの供給電圧の下限値である
ことを特徴とする請求項1に記載の車両用シフト制御装置。 - 前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が前記供給電圧判定値未満から該供給電圧判定値以上になった場合には、前記フェイル状態判定を再度行い、該再度のフェイル状態判定で前記アクチュエータが動作可能であると判定した場合に限り前記アクチュエータの駆動を許可する
ことを特徴とする請求項1又は2に記載の車両用シフト制御装置。 - 前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した後に、前記アクチュエータへの供給電圧が前記供給電圧判定値未満から該供給電圧判定値以上になった場合には、予め定められた乗員による操作が前記供給電圧が前記供給電圧判定値以上になった後になされたことを条件に、前記アクチュエータの駆動を許可する
ことを特徴とする請求項1乃至3の何れか1項に記載の車両用シフト制御装置。 - 前記予め定められた乗員による操作は、前記車両を走行可能な状態に切り替える操作である
ことを特徴とする請求項4に記載の車両用シフト制御装置。 - 前記フェイル状態判定で前記アクチュエータが動作不可能であると判定した場合には、前記アクチュエータの駆動を禁止し、
前記アクチュエータの駆動を禁止した後に該アクチュエータの駆動を許可する場合には、該禁止を解除してから該許可をする
ことを特徴とする請求項1乃至5の何れか1項に記載の車両用シフト制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2010/052472 WO2011101973A1 (ja) | 2010-02-18 | 2010-02-18 | 車両用シフト制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2011101973A1 JPWO2011101973A1 (ja) | 2013-06-17 |
| JP5321728B2 true JP5321728B2 (ja) | 2013-10-23 |
Family
ID=44482591
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012500426A Expired - Fee Related JP5321728B2 (ja) | 2010-02-18 | 2010-02-18 | 車両用シフト制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8734295B2 (ja) |
| JP (1) | JP5321728B2 (ja) |
| CN (1) | CN102859239B (ja) |
| DE (1) | DE112010005287B4 (ja) |
| WO (1) | WO2011101973A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018090033A (ja) * | 2016-11-30 | 2018-06-14 | トヨタ自動車株式会社 | 車両用パーキングロック制御装置 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110062865A (ko) * | 2009-12-04 | 2011-06-10 | 현대자동차주식회사 | 쉬프트 바이 와이어 변속장치를 탑재한 차량의 세차모드 제어방법 |
| WO2011142000A1 (ja) * | 2010-05-11 | 2011-11-17 | トヨタ自動車株式会社 | 車両用シフト制御装置 |
| JP5913971B2 (ja) * | 2011-12-27 | 2016-05-11 | 富士通テン株式会社 | マイコン監視装置、車両の電気負荷を制御する電子制御装置およびマイコン監視方法 |
| JP6323304B2 (ja) * | 2014-11-12 | 2018-05-16 | 株式会社デンソー | レンジ切換制御装置 |
| US9410616B2 (en) * | 2014-12-02 | 2016-08-09 | Toyota Jidosha Kabushiki Kaisha | Shift lever position determination device for vehicle |
| JP6525146B2 (ja) * | 2015-04-24 | 2019-06-05 | 三菱自動車工業株式会社 | シフト制御装置 |
| JP6300858B2 (ja) * | 2016-04-08 | 2018-03-28 | 本田技研工業株式会社 | 電動パーキングロック装置 |
| JP6696856B2 (ja) * | 2016-08-09 | 2020-05-20 | トヨタ自動車株式会社 | 車両のシフト制御装置 |
| JP6804948B2 (ja) * | 2016-11-25 | 2020-12-23 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP6928919B2 (ja) * | 2019-02-15 | 2021-09-01 | パナソニックIpマネジメント株式会社 | シフトバイワイヤ用バックアップ電源システム、制御プログラム |
| JP7338168B2 (ja) * | 2019-02-28 | 2023-09-05 | ニデック株式会社 | 駆動装置 |
| JP7207105B2 (ja) * | 2019-04-01 | 2023-01-18 | トヨタ自動車株式会社 | 車両の制御装置 |
| CN114559887B (zh) * | 2022-03-01 | 2023-06-02 | 东风汽车集团股份有限公司 | 一种p挡故障诊断方法及装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03219165A (ja) * | 1990-01-25 | 1991-09-26 | Nissan Motor Co Ltd | 自動変速機のシフト指示装置 |
| JPH061157A (ja) * | 1992-06-23 | 1994-01-11 | Toyota Motor Corp | 自動変速機のシフト制御装置 |
| JP2002349701A (ja) * | 2001-05-29 | 2002-12-04 | Jatco Ltd | シフトバイワイヤシステム |
| JP2006336840A (ja) * | 2005-06-06 | 2006-12-14 | Denso Corp | シフトレンジ切替装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3219165B2 (ja) | 1992-08-31 | 2001-10-15 | ティーディーケイ株式会社 | 金属膜パターン形成方法 |
| JP2003034157A (ja) | 2001-07-19 | 2003-02-04 | Toyota Motor Corp | 変速機のシフト制御装置及び変速機のシフト操作装置 |
| JP4356353B2 (ja) * | 2002-12-27 | 2009-11-04 | アイシン・エィ・ダブリュ株式会社 | ポジション判断装置、ポジション判断方法及びプログラム |
| CN100427812C (zh) * | 2004-09-29 | 2008-10-22 | 丰田自动车株式会社 | 自动变速器的档位切换装置 |
| JP4930457B2 (ja) | 2008-05-26 | 2012-05-16 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP5169930B2 (ja) * | 2009-03-23 | 2013-03-27 | トヨタ自動車株式会社 | 車両用シフト制御装置 |
| JP5375253B2 (ja) * | 2009-03-26 | 2013-12-25 | トヨタ自動車株式会社 | 車両用シフト制御装置 |
| JP5404685B2 (ja) * | 2011-04-06 | 2014-02-05 | 株式会社東芝 | 不揮発性半導体記憶装置 |
-
2010
- 2010-02-18 CN CN201080066228.0A patent/CN102859239B/zh not_active Expired - Fee Related
- 2010-02-18 DE DE112010005287.5T patent/DE112010005287B4/de not_active Expired - Fee Related
- 2010-02-18 JP JP2012500426A patent/JP5321728B2/ja not_active Expired - Fee Related
- 2010-02-18 WO PCT/JP2010/052472 patent/WO2011101973A1/ja active Application Filing
-
2012
- 2012-08-14 US US13/585,054 patent/US8734295B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03219165A (ja) * | 1990-01-25 | 1991-09-26 | Nissan Motor Co Ltd | 自動変速機のシフト指示装置 |
| JPH061157A (ja) * | 1992-06-23 | 1994-01-11 | Toyota Motor Corp | 自動変速機のシフト制御装置 |
| JP2002349701A (ja) * | 2001-05-29 | 2002-12-04 | Jatco Ltd | シフトバイワイヤシステム |
| JP2006336840A (ja) * | 2005-06-06 | 2006-12-14 | Denso Corp | シフトレンジ切替装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018090033A (ja) * | 2016-11-30 | 2018-06-14 | トヨタ自動車株式会社 | 車両用パーキングロック制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2011101973A1 (ja) | 2013-06-17 |
| US20120309590A1 (en) | 2012-12-06 |
| WO2011101973A1 (ja) | 2011-08-25 |
| CN102859239A (zh) | 2013-01-02 |
| DE112010005287T5 (de) | 2013-02-07 |
| DE112010005287B4 (de) | 2022-08-04 |
| CN102859239B (zh) | 2014-08-13 |
| US8734295B2 (en) | 2014-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5321728B2 (ja) | 車両用シフト制御装置 | |
| JP5310871B2 (ja) | 車両用のシフト制御装置 | |
| JP5240172B2 (ja) | 車両用シフト制御装置 | |
| JP5392409B2 (ja) | 車両用シフト制御装置 | |
| JP5359459B2 (ja) | 車両のシフト制御装置 | |
| JP5375253B2 (ja) | 車両用シフト制御装置 | |
| JP6696856B2 (ja) | 車両のシフト制御装置 | |
| JP5071422B2 (ja) | 車両用シフト制御装置 | |
| WO2011048636A1 (ja) | 車両の制御装置 | |
| JP5267270B2 (ja) | 車両のシフト制御装置 | |
| KR20150052137A (ko) | 뉴트럴 판정 장치 및 차량의 제어 장치 | |
| JP5733165B2 (ja) | 車両の制御装置 | |
| JP5195710B2 (ja) | 車両の制御装置 | |
| WO2010128561A1 (ja) | 車両用駐車制御装置 | |
| JP2011073574A (ja) | ハイブリッド電気自動車の変速制御装置 | |
| JP6626585B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| JP2005069407A (ja) | 動力伝達機構の制御装置 | |
| JP6583074B2 (ja) | 車両用パーキングロック機構の制御装置 | |
| JP2016120807A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130618 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130701 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5321728 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |