JP4273560B2 - モータの制御装置 - Google Patents
モータの制御装置 Download PDFInfo
- Publication number
- JP4273560B2 JP4273560B2 JP07741599A JP7741599A JP4273560B2 JP 4273560 B2 JP4273560 B2 JP 4273560B2 JP 07741599 A JP07741599 A JP 07741599A JP 7741599 A JP7741599 A JP 7741599A JP 4273560 B2 JP4273560 B2 JP 4273560B2
- Authority
- JP
- Japan
- Prior art keywords
- speed
- frequency characteristic
- motor
- command
- speed command
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/06—Arrangements for speed regulation of a single motor wherein the motor speed is measured and compared with a given physical value so as to adjust the motor speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/17—Circuit arrangements for detecting position and for generating speed information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Electric Motors In General (AREA)
Description
【発明の属する技術分野】
本発明は、モータの周波数特性を測定する機能を備えたモータの制御装置に関するものである。
【0002】
【従来の技術】
近年、動作特性の劣化要因となる機械共振の解析、あるいは、制御の応答性、安定性の解析などを目的として、負荷を接続した状態においてモータの周波数特性を測定することが広く行われている。
【0003】
このようなモータの周波数特性を測定する従来の方法としては、例えば図12に示す構成をとる場合が多い。図12において、モータ駆動装置1は指令入力に従ってモータ3とこの駆動軸に接続された負荷4を駆動制御するものである。指令入力は速度あるいは位置とするものが一般的であるが、ここでは速度指令2であるものとして説明する。サーボアナライザ5は正弦波信号を発生する発振器を内部に備えたもので、その正弦波信号出力がモータ駆動装置1の速度指令2となるように接続されており、また速度検出器6が検出するモータ3の速度7が入力接続されている。
【0004】
この構成において、サーボアナライザ5は速度指令2として正弦波信号を出力する。モータ駆動装置1はこの速度指令2に従ってモータ3及び負荷4を駆動するため、その動きは図13に示すような正弦波状となる。この状態においてサーボアナライザは、速度指令2と速度7の振幅比であるゲインと、速度指令2と速度7の位相差を検出しており、徐々に速度指令2の周波数を上昇させていきながらこの検出を続けることで、速度指令2から速度7までの周波数特性を測定する。この測定結果はボード線図として表示するのが一般的である。
【0005】
【発明が解決しようとする課題】
このような従来の方式では、周波数特性を測定する計測器であるサーボアナライザ5を必要とする。このため、負荷4が大きな機械設備であって動かすことができない場合には、サーボアナライザ5の方をその機械の設置されている場所に運び込まなければならないが、一般にサーボアナライザ5は携帯性に欠く計測器であるため極めて不便であった。また、速度指令2の周波数を所望の測定帯域の最低周波数から開始して最高周波数まで徐々に上昇させていくために、測定時間が長いという問題があった。ノイズ等の影響を抑え測定精度を上げるためには、速度指令2の振幅をある程度大きくする必要があるが、このような振幅が大きい状態で測定時間が長いとモータ3と負荷4に与える負担は大きくなり、場合によってはモータ3の過熱破壊や負荷4である機械設備の破壊に至ることがあった。
【0006】
本発明は上記課題を解決するもので、サーボアナライザ5のような特別な計測器を必要とせずに負荷4を接続した状態におけるモータ3の周波数特性を短時間で測定できるモータの制御装置を提供することを目的とするものである。
【0007】
【課題を解決するための手段】
この目的を達成するために、本発明のモータの制御装置は、モータ駆動装置の内部に配設したホワイトノイズ生成手段と、通常動作時の速度指令と前記ホワイトノイズ生成手段の出力とを切り替える速度指令切り替え手段と、速度指令切り替え手段の出力を速度指令としてモータを制御する速度制御手段と、予め設定した周期でモータまたは負荷の速度をサンプリングする速度検出手段と、前記速度制御手段に与える速度指令データと前記速度検出手段から得られる速度データをフーリエ変換する第1のフーリエ変換手段と、第1のフーリエ変換手段の出力データに基づき速度指令から速度までの周波数特性を求める第1の周波数特性演算手段と、速度指令と速度の差を求める速度偏差演算手段と、速度指令と速度偏差演算手段から得られる速度偏差をフーリエ変換する第2のフーリエ変換手段と、第2のフーリエ変換手段の出力データに基づき速度指令から速度偏差までの周波数特性を求める第2の周波数特性演算手段と、第1の周波数特性演算手段と第2の周波数特性演算手段の出力結果に基づき速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を求める第3の周波数特性演算手段とを備え、速度制御をかけた状態で、速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を得るものである。
【0008】
この構成により、周波数特性を求める構成をモータの制御装置に含んでいるため特別な計測器を必要としない。また、全ての周波数成分を均一に含んだホワイトノイズを速度指令とすることで、従来のように周波数を徐々に上昇させる必要がなく、短時間で測定を行うことができる。
【0009】
【発明の実施の形態】
上記の課題を解決するために本発明のモータの制御装置は、本発明のモータの制御装置は、モータ駆動装置の内部に配設したホワイトノイズ生成手段と、通常動作時の速度指令と前記ホワイトノイズ生成手段の出力とを切り替える速度指令切り替え手段と、速度指令切り替え手段の出力を速度指令としてモータを制御する速度制御手段と、予め設定した周期でモータまたは負荷の速度をサンプリングする速度検出手段と、前記速度制御手段に与える速度指令データと前記速度検出手段から得られる速度データをフーリエ変換する第1のフーリエ変換手段と、第1のフーリエ変換手段の出力データに基づき速度指令から速度までの周波数特性を求める第1の周波数特性演算手段と、速度指令と速度の差を求める速度偏差演算手段と、速度指令と速度偏差演算手段から得られる速度偏差をフーリエ変換する第2のフーリエ変換手段と、第2のフーリエ変換手段の出力データに基づき速度指令から速度偏差までの周波数特性を求める第2の周波数特性演算手段と、第1の周波数特性演算手段と第2の周波数特性演算手段の出力結果に基づき速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を求める第3の周波数特性演算手段とを備え、速度制御をかけた状態で、速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を得るものである。
【0010】
この構成により、周波数特性を求める構成をモータの制御装置に含んでいるため特別な計測器を必要としない。また、全ての周波数成分を均一に含んだホワイトノイズを速度指令とすることで、従来のように周波数を徐々に上昇させる必要がなく、短時間で測定を行うことができる。
【0012】
また、モータ駆動装置の内部に配設したホワイトノイズ生成手段と、通常動作時の速度指令と前記ホワイトノイズ生成手段の出力とを切り替える速度指令切り替え手段と、速度指令切り替え手段の出力を速度指令としてモータを制御する速度制御手段と、予め設定した周期でモータまたは負荷の速度をサンプリングする速度検出手段と、速度指令と速度の差を求める速度偏差演算手段と、速度偏差演算手段から得られる速度偏差データと速度検出手段から得られる速度データをフーリエ変換する第3のフーリエ変換手段と、第3のフーリエ変換手段の出力データに基づき速度制御の一巡伝達関数の周波数特性を求める第4の周波数特性演算手段とを備えたものである。
【0013】
この構成により、速度制御をかけた状態で一巡伝達関数の周波数特性を得ることができ、制御の安定性の判断や、負荷の共振特性等を詳細に調べるのに利用することができる。
【0026】
【実施例】
以下、本発明の実施例について、図面を参照しながら順に説明する。
【0027】
(実施例1)
図1は本発明のモータの制御装置における第1の実施例を示すブロック図である。ホワイトノイズ生成手段8をモータ駆動装置1の内部に配設しており、この出力と速度指令2のいずれかが速度指令切り替え手段9によって選択され速度制御手段10の速度指令11となるように構成している。モータ3にはロータリエンコーダ12が取り付けてあり、この検出信号によって速度検出手段13がモータ3の速度14をサンプリングするようになっている。速度制御手段10は速度指令11と速度14が一致するようにモータ3を制御するものである。速度指令11と速度14は第1のフーリエ変換手段15を介して第1の周波数特性演算手段16にデータが渡るように構成している。
【0028】
以上の構成において、通常にモータ3を制御する場合には、速度指令切り替え手段9が速度指令2を選択して、これが速度制御手段10の速度指令11となるようにする。これにより、モータ3及び負荷4は速度指令2に従って動作する。次に周波数特性を測定する場合には、まず、速度指令切り替え手段9がホワイトノイズ生成手段8の出力を選択して速度指令11がホワイトノイズとなるようにする。これにより、モータ3及び負荷4はホワイトノイズを速度指令として動作する。この動作中における速度指令11と速度14の時間領域のデータを第1のフーリエ変換手段15が周波数領域のデータに置換し、さらにこのデータに基づいて第1の周波数特性演算手段16が速度指令11から速度14までの周波数特性であるゲインと位相を求める。すなわち、モータ3の速度指令応答特性が求まる。
【0029】
本実施例によれば、モータの制御装置の中に周波数特性を得るための構成を含んでいるため、従来要していた特別な計測器を必要としない。したがって、簡便に負荷4を接続した状態でのモータ3の周波数特性を測定することができる。また、全ての周波数成分を均一に含んだホワイトノイズを速度指令とすることで、従来のように周波数を徐々に上昇させる必要がなくなり、短時間で測定を行うことができる。測定精度を上げるために速度指令の振幅を大きくした場合であっても、測定が短時間で終了するため、モータ3と負荷4に与える負担を小さく抑えることができる。さらに、すべてをソフトウェアで容易に構成できるものであり、そのようにソフトウェアで実現すれば従来の構成に対するコストの上昇がほとんど無い利点を有する。
【0030】
なお、理想的なホワイトノイズは実現が困難であるため、これを広く一般に利用されている疑似ランダム信号であるM系列信号などにすれば、ホワイトノイズ生成手段8の構成を簡単にすることができる。また、ホワイトノイズに含まれる周波数成分の均一性が十分に高ければ速度指令11のゲイン特性は周波数によらず一定となるので、速度14データのみのフーリエ変換結果をもって周波数特性を求める構成としてもよい。また、図1ではモータ3に取り付けたロータリエンコーダ12によりモータ3の速度を検出する構成としているが、これを負荷4に速度を検出するセンサを取り付けて負荷4の速度を検出する構成としてもよい。こうすれば、速度指令2に対する負荷4の応答周波数特性が得られ、モータ3と負荷4の連結機構の特性からこの2つの動きに差が生じる場合に真の負荷4の挙動がわかり有効である。また、第1のフーリエ変換手段15が変換処理するデータ数を2のべき乗にすれば、従来から広く知られている高速フーリエ変換アルゴリズムが適用でき、一連の処理の高速化を図ることができる。さらに、得られる周波数特性の最高周波数は速度14データのサンプリング周期により決まるため、サンプリング周期を変更して測定した周波数特性結果をいくつか重ねることで広い帯域の結果を得る構成としてもよい。
【0031】
(実施例2)
図2は本発明の第2の実施例を示すブロック図であり、図1における速度指令11と速度14からの処理を示したもので、共通部分については省略している。ただし、第1のフーリエ変換手段15と第1の周波数特性演算手段16は図1に示すものと同一であるが、説明のため省略せずに図示している。速度偏差演算手段17は速度指令11と速度14の差を求め速度偏差18として出力するものであり、速度指令11とこの速度偏差18が第2のフーリエ変換手段19を介して第2の周波数特性演算手段20にデータが渡るように構成している。さらに、第1の周波数特性演算手段16の出力と第2の周波数特性演算手段20の出力が第3の周波数特性演算手段21に渡る構成としている。
【0032】
以上の構成において、周波数特性を測定する場合に、モータ3及び負荷4はホワイトノイズを速度指令として動作し、第1の周波数特性演算手段16が速度指令11から速度14までの周波数特性を求めることについては実施例1と同じである。本実施例ではこれに加え、速度指令11と速度偏差18の時間領域のデータを第2のフーリエ変換手段19により周波数領域のデータに置換し、さらにこのデータから第2の周波数特性演算手段20が速度指令11から速度偏差18までの周波数特性であるゲインと位相を求める。第3の周波数特性演算手段は第1の周波数特性演算手段16で得られたゲインを第2の周波数特性演算手段20で得られたゲインで除すことで、速度偏差18から速度14までのゲイン特性、すなわち速度制御の一巡伝達関数のゲイン特性を求め、また、第1の周波数特性演算手段16で得られた位相と第2の周波数特性演算手段20で得られた位相との差を求めることで速度制御の一巡伝達関数の位相特性を求める。
【0033】
本実施例によれば、実施例1の構成に速度偏差演算手段17と第2のフーリエ変換手段19と第2の周波数特性演算手段20と第3の周波数特性演算手段21という構成要素を付加しただけで、速度制御の一巡伝達関数の周波数特性を得ることができる。一巡伝達関数の周波数特性は、速度制御手段10が行う速度フィードバック制御の安定性を判断するのに利用することができる。また、速度制御手段10内部の補償器の特性は既知であるから、一巡伝達関数からはモータ3と負荷4の伝達関数も容易に求めることができ、これにより負荷4の共振特性などを詳細に調べることができる。一般にこのような負荷4の伝達特性を調べる際は、モータ3に印加するトルクに対し指令を与えて速度を検出する方法をとる場合が多いが、この場合、モータ3及び負荷4の速度は制御されていないために定まらず、安全面において問題があった。これに対し、本実施例では速度制御をかけた状態で測定を行うため、安全性が高い。
【0034】
(実施例3)
図3は本発明の第3の実施例を示すブロック図であり、図1における速度指令11と速度14からの処理を示したもので、共通部分については省略している。速度偏差演算手段17は実施例2と同様に速度指令11と速度14の差を求め速度偏差18として出力するものである。この速度偏差18と速度14が第3のフーリエ変換手段22を介して第4の周波数特性演算手段23にデータが渡るように構成している。
【0035】
以上の構成において、周波数特性を測定する場合に、モータ3及び負荷4はホワイトノイズを速度指令として動作し、これと同時に、速度偏差18と速度14の時間領域のデータを第3のフーリエ変換手段22により周波数領域のデータに置換し、さらにこのデータから第4の周波数特性演算手段20が速度偏差18から速度14までの周波数特性を求める。すなわち、速度制御の一巡伝達関数の周波数特性が得られる。
【0036】
本実施例によれば、実施例2よりも簡単な構成で速度制御の一巡伝達関数の周波数特性を得ることができる。
【0037】
(実施例4)
図4は本発明の第4の実施例を示すブロック図であり、図1における第1の周波数特性演算手段16からの処理を示したもので、他は図1と共通であるため省略している。第1の周波数特性演算手段16で得た周波数特性が応答周波数検出手段24に伝えられて応答周波数25が検出され、この応答周波数25と速度制御手段10の制御ゲイン値Kとをイナーシャ推定手段26に伝える構成としている。
【0038】
応答周波数検出手段24は第1の周波数特性演算手段16で得られたモータ3の速度指令応答特性から、図5に示すようにゲイン特性が3dB低下する周波数を応答周波数25として検出する。この応答周波数25と制御ゲイン値Kに基づいてイナーシャ推定手段26はモータ3と負荷4のイナーシャを求める。図6は速度制御手段10による速度制御のブロック図を表したものである。ここで、Kは制御ゲイン値、Jはモータ3と負荷4のイナーシャの合計値、sはラプラス演算子である。このブロック図の速度指令11から速度14までの伝達関数は時定数がJ/Kの一次遅れ特性を示すものであり、このことから応答周波数25は時定数の逆数であるK/Jで表すことができる。この関係によりイナーシャJは制御ゲイン値Kを応答周波数25で除算することで求めることができる。イナーシャ推定手段26はこの演算を行うことでモータ3と負荷4のイナーシャの合計値を推定する。
【0039】
本実施例によれば、制御を行う上で重要なパラメータであるモータ3と負荷4のイナーシャを容易に推定することができる。イナーシャの値が推定されることにより、所望の応答特性を得るための制御ゲインの値が決まるため、自動的に速度制御手段10の制御ゲインKを設定することも可能である。
【0040】
(実施例5)
図7は本発明の第5の実施例を示すブロック図である。周波数特性27は実施例1の構成で得られる速度指令応答特性もしくは実施例2及び実施例3の構成で得られる速度制御の一巡伝達特性であり、このデータが共振周波数検出手段28に伝えられて共振周波数29が検出され、これをノッチフィルタ特性設定手段30に伝える。速度制御手段10による速度制御のブロック図は図6で示したものと異なり、モータ3と負荷4との連結機構の剛性が低く、共振を有する場合として示している。ここで、Jmはモータ3のイナーシャ、Jlは負荷4のイナーシャ、Kfはバネ定数、Cfは粘性摩擦係数、sはラプラス演算子である。さらに、制御ゲイン値Kのブロックの後段にノッチフィルタ31を挿入しており、このノッチフィルタ31の特性をノッチフィルタ特性設定手段30によって設定する構成としている。ωnはノッチ周波数、αはノッチ幅を決めるパラメータである。
【0041】
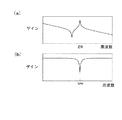
共振周波数検出手段28は周波数特性27から、図8(a)に示すようにゲイン特性の傾きが正から負に急変するピーク周波数を共振周波数29として検出する。ノッチフィルタ特性設定手段30は、図8(b)に示すようにこの共振周波数29にノッチ周波数ωnがほぼ一致するようにノッチフィルタ31の特性を設定する。これにより、モータ3を駆動するトルクから共振を励起する周波数成分が除去されるため、共振を抑制することができる。
【0042】
本実施例によれば、検出したモータ3及び負荷4の共振特性に合わせて自動的にノッチフィルタの特性を設定することにより、共振を抑制することができる。
【0043】
なお、共振周波数29の検出は位相特性が急変することを利用して行ってもよい。また、ノッチフィルタ31の特性の設定はノッチ周波数だけでなく、たとえばノッチ幅も得られた共振特性に合わせて設定するようにすると、さらに共振の抑制効果を高めることができる。
【0044】
(実施例6)
図9は本発明の第6の実施例を示すブロック図である。図9において、ホワイトノイズ生成手段8の出力と位置指令32のいずれかが位置指令切り替え手段33によって選択され、位置制御手段34の位置指令35となるように構成している。モータ3に取り付けたロータリエンコーダ12の出力信号によって位置検出手段36がモータ3の位置37をサンプリングするようになっている。位置制御手段34は位置指令35と位置37が一致するようにモータ3を制御するものである。位置指令35と位置37は第4のフーリエ変換手段38を介して第5の周波数特性演算手段39にデータが渡るように構成している。
【0045】
この構成において、通常にモータ3を制御する場合には、位置指令切り替え手段33が位置指令32を選択して位置制御手段34の位置指令35となるようにする。これにより、モータ3及び負荷4は位置指令32に従って動作する。次に周波数特性を測定する場合には、まず、位置指令切り替え手段33がホワイトノイズ生成手段8を選択して位置指令35がホワイトノイズとなるようにする。これにより、モータ3及び負荷4はホワイトノイズを位置指令として動作する。このとき同時に、位置指令35と位置37の時間領域のデータを第4のフーリエ変換手段38により周波数領域のデータに置換し、さらにこのデータから第5の周波数特性演算手段39が位置指令35から位置37までの周波数特性であるゲインと位相を求める。すなわち、モータ3の位置指令応答特性が求まる。
【0046】
本実施例によれば、特別な計測器を必要とせずに、簡便に負荷4を接続した状態でのモータ3の位置指令応答特性を測定することができる。また、全ての周波数成分を均一に含んだホワイトノイズを位置指令とすることにより短時間で測定を行うことができること、また、これによりモータ3と負荷4に与える負担が小さいこと、また、すべてをソフトウェアで容易に実現できるものであるためコストの上昇がほとんど無いこと、などの実施例1と同様の効果を有する。
【0047】
なお、負荷4に位置を検出するセンサを取り付けて負荷4の位置を検出する構成としてもよく、モータ3と負荷4の連結機構の特性からこの2つの動きに差が生じる場合に真の負荷4の挙動がわかり有効である。
【0048】
(実施例7)
図10は本発明の第7の実施例を示すブロック図である。実施例1を示す図1とほぼ同様の構成であるが、速度指令11と速度14のデータがデータ記憶手段40とデータ伝送手段41を介して第1のフーリエ変換手段15に伝えられる点が異なる。また、ホワイトノイズ生成手段8、速度指令切り替え手段9、速度制御手段10、速度検出手段13、データ記憶手段40はモータ駆動装置1の内部に配設し、第1のフーリエ変換手段15と第1の周波数特性演算手段16は外部処理装置42の内部に配設し、モータ駆動装置1と外部処理装置42とはデータ伝送手段41で接続している。
【0049】
この構成において、周波数特性を測定する場合には、ホワイトノイズを速度指令11として与える測定動作中において、速度指令11と速度14のデータが一旦RAM等のデータ記憶手段40に蓄えられる。そして、測定動作が終了した後に速度指令11と速度14のデータをデータ記憶手段40から取り出し、データ伝送手段41により第1のフーリエ変換手段にデータを渡す。この他の動作は実施例1と同様である。
【0050】
すでに説明したように、速度指令11と速度14のデータのサンプリング周期は短くするほど高い周波数帯域の周波数特性が得られる。これに対し一般にフーリエ変換処理は時間を要する演算処理であるため、高い周波数帯域の周波数特性を得たい場合には処理が間に合わなくなる。本実施例によれば、このようにサンプリング周期を短くした場合であっても、データ記憶手段40によって速度指令11と速度14のデータを一旦蓄えることにより処理時間の差を吸収でき、さらに、フーリエ変換処理と周波数特性演算処理をモータ駆動装置1とは独立した例えばパーソナルコンピュータ等の外部処理装置42で行う構成とすることで、モータ駆動装置1の処理の軽減を図ることができる。また、周波数特性はボード線図などのグラフ表示をすると解りやすく、さらにこのグラフをスムージングなどの平滑化処理を行えば、ノイズ成分が除去されてより解析しやすくすることができるが、こういった処理をモータ駆動装置1で行うのは処理能力の不足や表示器が必要などの理由により困難である。しかし、本実施例の構成をとりグラフ表示処理を外部処理装置42で行うようにすれば、これを容易に実現することができる。
【0051】
なお、本構成は実施例2、実施例3で示した速度制御の一巡伝達特性の測定、及び、実施例6で示した位置制御の応答特性の測定にも、データ記憶手段40あるいはデータ伝送手段41が扱うデータを位置指令や位置あるいは速度偏差などに変更することにより同様に適用できるものである。
【0052】
(実施例8)
図11は本発明の第8の実施例における、データ記憶手段40及びデータ伝送手段41が扱うデータの構成図である。他の構成については実施例7で示した図10と同様である。
【0053】
本実施例ではホワイトノイズ生成手段8が生成出力する信号は前述のM系列信号としており、2値信号である。したがって、周波数特性を測定するときの速度指令11であるホワイトノイズをWとすると、この信号は0と1の基準信号データREFとホワイトノイズWの振幅AMPとオフセットOFSとを用いて、W=(2×REF−1)×AMP+OFSの関係式で表すことができる。振幅AMPとオフセットOFSのデータは一定であるから、周波数特性を測定する際にサンプリングする速度指令11データは基準信号データREFのみをデータ記憶手段40に蓄えても、後で、振幅AMPとオフセットOFSのデータから速度指令11であるホワイトノイズWを再生することができる。このことを利用して、データ記憶手段40及びデータ伝送手段41が扱うデータの構成を、図11に示すようにビット0すなわちLSBを速度指令11の基準信号データREFとし、残りの上位ビットを速度14データとして割り付けた複合データとしている。そして、このデータを外部処理装置42が受け取った後に、データを分離し、さらに、速度指令11であるホワイトノイズWの再生を行う。
【0054】
本実施例によれば、速度指令11と速度14の2つのデータを1つにするため、データ量を半減できる。これにより記憶手段40の記憶容量も半減することができ、また、モータ駆動装置1から外部処理装置42へのデータの伝送時間も大幅に短縮できる。
【0055】
なお、LSBに速度指令11の基準信号データREFを割り付け、残りの上位ビットを速度14データとするデータ構成としたのは、基準信号データREFを取り出すには上位ビットをマスクすることで、また、速度14データを取り出すには算術右シフトすることで速度14データの符号を壊すことなく簡単に行うことができるためであるが、特にこの割り付けでなくても構わない。また、ホワイトノイズは2値信号であればよく、M系列信号以外であってもよい。さらに、本構成は位置制御の周波数特性の測定にも、速度データを位置データとすることにより同様に適用できるものである。
【0056】
【発明の効果】
以上に示した実施例から明らかなように、請求項1記載の発明によれば、モータの制御装置の中に周波数特性を得るための構成を含んでいるため、特別な計測器を必要とせず簡便に負荷を接続した状態でのモータの周波数特性を測定することができる。また、全ての周波数成分を均一に含んだホワイトノイズを速度指令とすることで、短時間に測定を行うことができ、モータと負荷に与える負担を小さく抑えることができる。
【0057】
また、速度制御をかけた状態にて一巡伝達関数の周波数特性を得ることができ、制御の安定性の判断や負荷の共振特性などを詳細に調べるのに利用することができる。
【0058】
また、請求項2記載の発明によれば、請求項1記載の構成よりもさらに簡単な構成で速度制御の一巡伝達関数の周波数特性を得ることができる。
【図面の簡単な説明】
【図1】本発明のモータの制御装置における第1の実施例を示すブロック図
【図2】第2の実施例におけるブロック図
【図3】第3の実施例におけるブロック図
【図4】第4の実施例におけるブロック図
【図5】第4の実施例における動作を示すボード線図
【図6】第4の実施例におけるブロック図
【図7】第5の実施例におけるブロック図
【図8】第5の実施例における動作を示すボード線図
【図9】第6の実施例におけるブロック図
【図10】第7の実施例におけるブロック図
【図11】第8の実施例におけるデータ構成図
【図12】従来のモータの制御装置における周波数特性測定方法を示すブロック図
【図13】従来例における動作説明図
【符号の説明】
8 ホワイトノイズ生成手段
9 速度指令切り替え手段
10 速度制御手段
13 速度検出手段
15 第1のフーリエ変換手段
16 第1の周波数特性演算手段
17 速度偏差演算手段
19 第2のフーリエ変換手段
20 第2の周波数特性演算手段
21 第3の周波数特性演算手段
22 第3のフーリエ変換手段
23 第4の周波数特性演算手段
24 応答周波数検出手段
26 イナーシャ推定手段
28 共振周波数検出手段
30 ノッチフィルタ特性設定手段
33 位置指令切り替え手段
34 位置制御手段
36 位置検出手段
38 第4のフーリエ変換手段
39 第5の周波数特性演算手段
40 データ記憶手段
41 データ伝送手段
Claims (2)
- モータ駆動装置の内部に配設したホワイトノイズ生成手段と、
通常動作時の速度指令と前記ホワイトノイズ生成手段の出力とを切り替える速度指令切り替え手段と、
速度指令切り替え手段の出力を速度指令としてモータを制御する速度制御手段と、
予め設定した周期でモータまたは負荷の速度をサンプリングする速度検出手段と、
前記速度制御手段に与える速度指令データと前記速度検出手段から得られる速度データをフーリエ変換する第1のフーリエ変換手段と、
第1のフーリエ変換手段の出力データに基づき速度指令から速度までの周波数特性を求める第1の周波数特性演算手段と、
速度指令と速度の差を求める速度偏差演算手段と、
速度指令と速度偏差演算手段から得られる速度偏差をフーリエ変換する第2のフーリエ変換手段と、
第2のフーリエ変換手段の出力データに基づき速度指令から速度偏差までの周波数特性を求める第2の周波数特性演算手段と、
第1の周波数特性演算手段と第2の周波数特性演算手段の出力結果に基づき速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を求める第3の周波数特性演算手段とを備え、
速度制御をかけた状態で、速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を得るモータの制御装置。 - モータ駆動装置の内部に配設したホワイトノイズ生成手段と、
通常動作時の速度指令と前記ホワイトノイズ生成手段の出力とを切り替える速度指令切り替え手段と、
速度指令切り替え手段の出力を速度指令としてモータを制御する速度制御手段と、
予め設定した周期でモータまたは負荷の速度をサンプリングする速度検出手段と、
速度指令と速度の差を求める速度偏差演算手段と、
速度偏差演算手段から得られる速度偏差データと速度検出手段から得られる速度データをフーリエ変換する第3のフーリエ変換手段と、
第3のフーリエ変換手段の出力データに基づき速度偏差から速度までにおける速度制御の一巡伝達関数の周波数特性を求める第4の周波数特性演算手段とを備え、
速度制御をかけた状態で、速度偏差から速度までにおける一巡伝達関数の周波数特性を得るモータの制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP07741599A JP4273560B2 (ja) | 1999-03-23 | 1999-03-23 | モータの制御装置 |
| CN99126695A CN1094675C (zh) | 1999-03-23 | 1999-12-27 | 电机驱动控制系统 |
| DE69930204T DE69930204T2 (de) | 1999-03-23 | 1999-12-28 | System zur Motorantriebsregelung |
| EP99126050A EP1039624B1 (en) | 1999-03-23 | 1999-12-28 | Motor drive control system |
| US09/473,942 US6211640B1 (en) | 1999-03-23 | 1999-12-29 | Motor drive control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP07741599A JP4273560B2 (ja) | 1999-03-23 | 1999-03-23 | モータの制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000278990A JP2000278990A (ja) | 2000-10-06 |
| JP4273560B2 true JP4273560B2 (ja) | 2009-06-03 |
Family
ID=13633321
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP07741599A Expired - Lifetime JP4273560B2 (ja) | 1999-03-23 | 1999-03-23 | モータの制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6211640B1 (ja) |
| EP (1) | EP1039624B1 (ja) |
| JP (1) | JP4273560B2 (ja) |
| CN (1) | CN1094675C (ja) |
| DE (1) | DE69930204T2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018163664A1 (ja) | 2017-03-10 | 2018-09-13 | オムロン株式会社 | 評価装置、評価方法、および制御装置 |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100873237B1 (ko) * | 2000-09-21 | 2008-12-10 | 지에스아이 루모닉스 코포레이션 | 디지털 제어 서보 시스템 |
| WO2002031959A1 (fr) * | 2000-10-11 | 2002-04-18 | Matsushita Electric Industrial Co., Ltd. | Dispositif de commande de moteur, procede de reglage du dispositif de commande de moteur et dispositif de fixation de composants |
| US7492675B2 (en) * | 2001-01-25 | 2009-02-17 | Dphi Acquisitions, Inc. | Digital servo system with calibrated notch filters |
| US7522480B2 (en) | 2001-01-25 | 2009-04-21 | Dphi Acquisitions, Inc. | Digital tracking servo system with multi-track seek with an acceleration clamp |
| JP2002304219A (ja) * | 2001-04-04 | 2002-10-18 | Yaskawa Electric Corp | モータ制御装置およびメカ特性測定方法 |
| JP3975812B2 (ja) * | 2001-08-17 | 2007-09-12 | 株式会社安川電機 | 電動機制御装置の共振周波数検出装置 |
| JP4683255B2 (ja) * | 2001-08-20 | 2011-05-18 | 株式会社安川電機 | モータ制御装置の周波数特性演算装置 |
| JP4110358B2 (ja) * | 2001-09-04 | 2008-07-02 | 株式会社安川電機 | 電動機制御装置の機械モデル推定装置 |
| JP2004086702A (ja) * | 2002-08-28 | 2004-03-18 | Yaskawa Electric Corp | 振動抑制フィルタの自動設定方法 |
| US6963184B2 (en) * | 2002-09-26 | 2005-11-08 | 3M Innovative Properties Company | Adaptable spatial notch filter |
| JP4396100B2 (ja) | 2003-01-08 | 2010-01-13 | 株式会社安川電機 | 多軸電動機制御装置の共振周波数検出装置 |
| GB0313887D0 (en) * | 2003-06-16 | 2003-07-23 | Gsi Lumonics Ltd | Monitoring and controlling of laser operation |
| US7821216B2 (en) * | 2003-09-12 | 2010-10-26 | Brother Kogyo Kabushiki Kaisha | Motor control method and control device |
| FR2864762B1 (fr) * | 2004-01-06 | 2007-06-01 | Seb Sa | Appareil electromenager de preparation d'aliments prevu pour etre mis en veille et pour etre reactive |
| DE602005011248D1 (de) * | 2004-01-23 | 2009-01-08 | Gsi Group Corp | System und verfahren zum optimieren der zeichenmarkierungsleistung |
| JP4818626B2 (ja) * | 2005-03-28 | 2011-11-16 | 三菱電機株式会社 | レーザ加工装置およびノッチフィルタの設定方法 |
| US7109670B1 (en) * | 2005-05-25 | 2006-09-19 | Rockwell Automation Technologies, Inc. | Motor drive with velocity-second compensation |
| US7187142B2 (en) * | 2005-05-25 | 2007-03-06 | Rockwell Automation Technologies, Inc. | Motor drive with velocity noise filter |
| GB2452639B (en) * | 2006-04-21 | 2011-08-10 | Flowserve Man Co | Rotary encoder frequency analysis |
| JP4789067B2 (ja) * | 2006-04-24 | 2011-10-05 | 株式会社安川電機 | システム同定装置およびそれを備えたモータ制御装置 |
| JP4569514B2 (ja) * | 2006-04-25 | 2010-10-27 | 株式会社安川電機 | 適応ノッチフィルタ |
| JP2008145374A (ja) * | 2006-12-13 | 2008-06-26 | Fuji Electric Fa Components & Systems Co Ltd | 機械系の振動特性検出装置 |
| US7659683B2 (en) * | 2007-01-30 | 2010-02-09 | Rockwell Automation Technologies, Inc. | Resonant frequency identification |
| JP5206994B2 (ja) * | 2007-08-03 | 2013-06-12 | 株式会社安川電機 | 電動機制御装置およびそのゲイン調整方法 |
| JP4540727B2 (ja) * | 2008-07-31 | 2010-09-08 | 山洋電気株式会社 | モータ制御装置 |
| JP4231544B1 (ja) * | 2008-08-22 | 2009-03-04 | 山洋電気株式会社 | モータ制御装置 |
| CN101727092B (zh) * | 2008-10-31 | 2012-06-20 | 鸿富锦精密工业(深圳)有限公司 | 频谱分析系统及方法 |
| JP5127767B2 (ja) * | 2009-04-14 | 2013-01-23 | 三菱電機株式会社 | 駆動制御装置 |
| CN102270249B (zh) * | 2010-06-07 | 2013-11-20 | 上海通用汽车有限公司 | 识别零部件特征频率的方法 |
| JP2012249342A (ja) * | 2011-05-25 | 2012-12-13 | Hitachi Ltd | 電動機駆動システムおよび方法 |
| JP5209810B1 (ja) * | 2011-07-27 | 2013-06-12 | ファナック株式会社 | イナーシャと摩擦係数とばね定数を同時に推定する機能を備える電動機の制御装置 |
| DE102011086715A1 (de) * | 2011-11-21 | 2013-05-23 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Motorsteuergeräts für ein Antriebssystem |
| JP5384608B2 (ja) * | 2011-12-13 | 2014-01-08 | 東芝機械株式会社 | サーボ制御装置およびその調整方法 |
| KR101250614B1 (ko) * | 2011-12-14 | 2013-04-03 | 삼성전기주식회사 | 모터 제어 회로, 모터 구동 장치, 및 모터 제어 방법 |
| JP5919070B2 (ja) * | 2012-04-06 | 2016-05-18 | オークマ株式会社 | 位置制御装置 |
| JP5791815B2 (ja) * | 2013-03-07 | 2015-10-07 | 株式会社牧野フライス製作所 | 工作機械の送り軸制御方法および送り軸制御装置 |
| CN103149435A (zh) * | 2013-03-18 | 2013-06-12 | 哈尔滨工业大学 | 基于伪随机序列码的交流伺服系统机械谐振频率特性获取方法 |
| US20160123796A1 (en) * | 2013-06-03 | 2016-05-05 | Mitsubishi Electric Corporation | Frequency-response measurement device |
| JP5813151B2 (ja) * | 2014-02-21 | 2015-11-17 | ファナック株式会社 | 制御ループの周波数特性を算出する機能を有する数値制御装置 |
| JP6312548B2 (ja) * | 2014-07-31 | 2018-04-18 | ファナック株式会社 | 機械剛性の自己測定機能および自己監視機能を有するサーボモータ制御装置 |
| JP6212068B2 (ja) * | 2015-04-24 | 2017-10-11 | ファナック株式会社 | 機械の周波数特性をオンラインで取得する機能を有するサーボ制御装置 |
| JP6697313B2 (ja) | 2016-04-08 | 2020-05-20 | オークマ株式会社 | 送り軸制御装置における周波数特性測定方法 |
| JP6989099B2 (ja) * | 2017-03-03 | 2022-01-05 | 国立大学法人 名古屋工業大学 | 周波数不感帯を抑制する周波数応答解析システム |
| CN107302327B (zh) * | 2017-05-12 | 2019-07-16 | 广州视源电子科技股份有限公司 | 调整电机转速的方法和装置及电机 |
| CN107015086A (zh) * | 2017-05-12 | 2017-08-04 | 珠海格力节能环保制冷技术研究中心有限公司 | 测试带宽的方法、装置、系统及设备 |
| JP7102708B2 (ja) * | 2017-11-13 | 2022-07-20 | オムロン株式会社 | 周波数特性測定装置及び周波数特性測定方法 |
| CN108365706B (zh) * | 2018-01-26 | 2020-12-15 | 瑞声科技(南京)有限公司 | 线性电机共振频率的检测方法及装置 |
| CN114002803A (zh) * | 2020-07-28 | 2022-02-01 | 上海艾为电子技术股份有限公司 | 一种马达的驱动芯片和驱动方法、电子设备 |
| WO2023026419A1 (ja) | 2021-08-25 | 2023-03-02 | ファナック株式会社 | 制御装置及び制御方法 |
| WO2023074151A1 (ja) * | 2021-10-28 | 2023-05-04 | パナソニックIpマネジメント株式会社 | 周波数特性測定装置、および、周波数特性測定方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3395340A (en) * | 1966-09-12 | 1968-07-30 | Seismograph Service Corp | Method and apparatus for determining characteristics of a signal transfer system |
| US5155797A (en) * | 1987-09-08 | 1992-10-13 | Kabushiki Kaisha Meidensha | Control system for controlling revolution speed of electric motor |
| JPH02217904A (ja) * | 1989-02-17 | 1990-08-30 | Toyoda Mach Works Ltd | 位置決め制御装置 |
| US5155422A (en) * | 1991-03-28 | 1992-10-13 | Digital Equipment Corporation | Self-tuning adaptive bandwidth regulator |
| JPH05346813A (ja) | 1992-06-16 | 1993-12-27 | Mitsubishi Heavy Ind Ltd | Nc制御装置 |
| TW256914B (en) * | 1994-05-27 | 1995-09-11 | Ibm | Servo-writing system for use in a data recording disk drive |
| US5545988A (en) * | 1994-09-13 | 1996-08-13 | Tdk Corporation | Waveform signal processor with selective sampling |
| US5729113A (en) * | 1997-01-21 | 1998-03-17 | General Electric Company | Sensorless rotor velocity estimation for induction motors |
| JPH10332798A (ja) * | 1997-05-28 | 1998-12-18 | Sony Corp | モーターの周波数特性測定方法及び装置、モーター制御方法及び装置 |
-
1999
- 1999-03-23 JP JP07741599A patent/JP4273560B2/ja not_active Expired - Lifetime
- 1999-12-27 CN CN99126695A patent/CN1094675C/zh not_active Expired - Lifetime
- 1999-12-28 DE DE69930204T patent/DE69930204T2/de not_active Expired - Lifetime
- 1999-12-28 EP EP99126050A patent/EP1039624B1/en not_active Expired - Lifetime
- 1999-12-29 US US09/473,942 patent/US6211640B1/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018163664A1 (ja) | 2017-03-10 | 2018-09-13 | オムロン株式会社 | 評価装置、評価方法、および制御装置 |
| US11121659B2 (en) | 2017-03-10 | 2021-09-14 | Omron Corporation | Evaluation device, evaluation method and control device |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1039624B1 (en) | 2006-03-08 |
| US6211640B1 (en) | 2001-04-03 |
| JP2000278990A (ja) | 2000-10-06 |
| CN1267953A (zh) | 2000-09-27 |
| DE69930204T2 (de) | 2006-12-14 |
| EP1039624A2 (en) | 2000-09-27 |
| CN1094675C (zh) | 2002-11-20 |
| EP1039624A3 (en) | 2002-11-27 |
| DE69930204D1 (de) | 2006-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4273560B2 (ja) | モータの制御装置 | |
| EP1283593B1 (en) | Motor controller | |
| EP1376287B1 (en) | Motor controller and method for measuring characteristics of mechanism | |
| KR100710761B1 (ko) | 회전 기기의 성능 테스트 방법 및 시스템 | |
| JP5933844B2 (ja) | 位置検出器の角度誤差補正装置および角度誤差補正方法 | |
| EP3829051B1 (en) | Control parameter adjustment method used in electric motor control device and electric motor control device using said control parameter adjustment method | |
| EP2533011A2 (en) | Gyroscope dynamic motor amplitude compensation for enhanced rate estimation during startup | |
| US20160123796A1 (en) | Frequency-response measurement device | |
| EP1772739A2 (en) | Methods and apparatus for monitoring the condition of a machine | |
| WO2003017459A1 (fr) | Appareil de detection de la frequence de resonance d'une unite de commande d'un moteur electrique | |
| EP2626996B1 (en) | Motor constant calculating method for pm motor, and motor constant calculating device | |
| US6577137B1 (en) | Reverse inertial load test | |
| JP2003207424A (ja) | エンジンベンチシステム | |
| US10746624B2 (en) | Determining the root mean square value of a machine vibration variable | |
| JP2020165795A (ja) | 周波数特性測定装置、制御装置、及び周波数特性測定方法 | |
| JP2008145374A (ja) | 機械系の振動特性検出装置 | |
| JP4133572B2 (ja) | 負荷同定装置、負荷同定方法及び制御系設計支援方法 | |
| JPH0610634B2 (ja) | 携帯型振動診断装置 | |
| KR20190036667A (ko) | 전동기 속도 추정 장치 및 방법 | |
| JP2004088937A (ja) | モータの負荷機械解析装置 | |
| JP4590897B2 (ja) | 電動機制御装置、電動機制御装置システム | |
| JP2022035321A (ja) | 回転体のアンバランス算出方法及び算出装置 | |
| JP2005214711A (ja) | 制御対象の機械特性の測定装置及び測定方法 | |
| JPS6321511A (ja) | 試験用パルス発振装置 | |
| JPH05328778A (ja) | ブラシレスモータのイナーシャ推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051212 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20060112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080624 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080805 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081224 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090210 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090223 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120313 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120313 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130313 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130313 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140313 Year of fee payment: 5 |
|
| EXPY | Cancellation because of completion of term |