JP4171571B2 - マッサージ機 - Google Patents
マッサージ機 Download PDFInfo
- Publication number
- JP4171571B2 JP4171571B2 JP2000163289A JP2000163289A JP4171571B2 JP 4171571 B2 JP4171571 B2 JP 4171571B2 JP 2000163289 A JP2000163289 A JP 2000163289A JP 2000163289 A JP2000163289 A JP 2000163289A JP 4171571 B2 JP4171571 B2 JP 4171571B2
- Authority
- JP
- Japan
- Prior art keywords
- massage machine
- user
- massage
- specific part
- pillow body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Massaging Devices (AREA)
Description
【産業上の利用分野】
本発明は、マッサージ機に関するものである。
【0002】
【従来の技術】
例えば、座部と背凭れ部とを有する椅子型マッサージ機には、背凭れ部に、マッサージ動作する施療子を有するマッサージ器が使用者の人体に沿って昇降自在に設けられ、施療子に揉み及び叩きによるマッサージ動作をさせるようにしたものがある(例えば特開平9−262263号公報)。
この種の従来のマッサージ機では、一般的には、マッサージ機に対する使用者の肩や腰等の人体の特定部位の位置を自動的に認識するようには構成されていなかったため、例えば自動コースの選択により肩揉みや腰揉みを順次自動的に行わせる場合には、使用者が自らの座り方を変えて支持アームの施療子が人体の所望部位に移動するように調整するか、手動にて操作器を操作してマッサージ器を移動位置を微調整しなければならなかった。
【0003】
また、近年ブームになりつつあるツボ刺激をする場合においては、人体の肩等の特定部位からツボ位置をある程度(例えば±1cm位)正確に特定する必要性があるが、マッサージ機に対する使用者の肩等の人体の特定部位の位置を自動的に認識することができないため、ツボ位置にマッサージ器の施療子を正確に合わせることが困難になり、効果的なツボ刺激ができないという問題もあった。例えば、疲労回復のための揉み・叩き・指圧治療を自動的に行う場合には、正確に「天柱」というツボ位置の揉みと「肺兪」・「膈喩」というツボ位置を指圧する必要があるが、これらのツボ位置にマッサージ部材を正確に合わせることができなかった。
【0004】
また、従来のマッサージ機として、予め設定されたプログラムに基づいて施療子の動作モードや動作位置、動作時間等を順次変更しつつマッサージを行っていく自動マッサージ機能を持ったマッサージ機であって、背凭れ部に、モータの回転動力によって施療子に叩き動作や揉み動作等をさせるマッサージ器を備えた従来のマッサージ機には、施療子の人体側への突出量を一定に保ったまま施療子を上下方向に移動させることで、施療子が人体から受ける圧力の上下方向の分布を求め、この圧力分布から肩位置を判別するようにしたものもある(例えば特開平6−190012号公報)。
【0005】
しかし、この場合の圧力の検出は、施療子が人体を背面から押圧する際の反力がアーム等を介してばねを圧縮し、このばねの変位を検出するといもので、機械的変位によって施療子が人体から受ける圧力を検出するものであり、この方法では施療子が人体から受ける微妙な圧力変化を検出することは困難であり、使用者の肩位置や腰位置を正確に判別することはできず、ツボ位置に施療子を正確に合わせるようなことは困難となり、症状にあったツボ位置を順次自動的に指圧させるような場合には効果的なマッサージができない。
【0006】
しかも、機械的変位によって施療子が人体から受ける圧力を検出するためには、施療子が人体を背面から押圧する際の反力を伝達するアームやマッサージ部材の反力を受けるばねや該ばねを保持するばね保持機構等を特別に設ける必要があり、圧力検出機構が非常に複雑となるという問題もあった。
【0007】
【発明が解決しようとする課題】
本発明は上記問題点に鑑み、簡単な構成でマッサージ機に対する使用者の肩等の特定部位の位置を正確に判別できるようにしたものである。
【0008】
【課題を解決するための手段】
上記問題点を解決する本発明の技術手段は、マッサージ動作する施療子を有するマッサージ器7が、使用者の人体に沿って移動自在に設けられたマッサージ機において、
使用者の人体の特定部位に配置される装備品が具備され、該装備品のマッサージ機に対する配置位置を検出することによって、マッサージ機に対する使用者の特定部位の位置を判別するようにした点にある。
【0009】
本発明の他の技術手段は、マッサージ動作する施療子を有するマッサージ器7が、使用者の人体に沿って移動自在に設けられたマッサージ機において、
使用者の人体の特定部位に配置される装備品が具備され、該装備品のマッサージ機に対する配置位置を検出する検出手段59が設けられ、該検出手段59によって検出した装備品のマッサージ機に対する配置位置から、マッサージ機に対する使用者の特定部位の位置を判別するようにした点にある。
本発明の他の技術手段は、マッサージ動作する施療子を有するマッサージ器7が、使用者の人体に沿って移動自在に設けられたマッサージ機において、
使用者の人体の特定部位に配置されるマッサージ機の装備品と、マッサージ器7との間に、両者が互いに接近していることを検出する検出手段59が設けられ、検出手段59が検出したときのマッサージ器7の移動位置から、マッサージ機に対する使用者の特定部位の位置を判別するようにした点にある。
【0010】
本発明の他の技術手段は、前記検出手段59が、前記装備品又はマッサージ器7の一方に設けた磁性体57と、他方に設けた磁気センサ58とで構成されている点にある。
本発明の他の技術手段は、前記マッサージ機の装備品が、背凭れ部4を有するマッサージ機の枕体51とされ、枕体51が背凭れ部4の前面に上下調整自在に設けられ、使用者の頭部に配置された枕体51の配置位置を検出することによって、マッサージ機に対する使用者の特定部位の位置を判別するようにした点にある。
【0011】
本発明の他の技術手段は、前記マッサージ機の装備品が、マッサージ機を操作するリモコン63とされ、リモコン63を使用者が該使用者の特定部位に配置したとき、このリモコン63のマッサージ機に対する配置位置を検出することによって、マッサージ機に対する使用者の特定部位の位置を判別するようにした点にある。
本発明の他の技術手段は、前記使用者の特定部位の位置として、マッサージ機に対する肩位置を判別するようにした点にある。
【0012】
【発明の実施の形態】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、椅子型マッサージ機1の全体構成を示している。図1において、椅子型マッサージ機1は、脚体2により支持された座部3と、座部3の後部に設けられた背凭れ部4と、座部3の左右両側に設けられたひじ掛け部5とを具備している。背凭れ部4は、リクライニング装置6により座部3後端部側を支点としてリクライニング可能に構成されている。
【0013】
背凭れ部4にマッサージ器7が内蔵されている。マッサージ器7は、図4にも示す如く第一施療子(揉み玉、マッサージ用のローラ)8及び第二施療子(揉み玉、マッサージ用のローラ)9と、マッサージ用モータ10と、マッサージ用モータ10の回転動力を施療子8,9に伝達して該各施療子8,9に揉み動作や叩き動作をさせる伝動機構11と、支持枠14とを有し、マッサージ器7は、昇降手段13により背凭れ部4内を上下動可能に構成されている。
昇降手段13は、マッサージ器7の支持枠14に螺合した送りねじ15を昇降モータ16で回転させることによって、マッサージ器7を昇降させる機構を採用してある。
【0014】
なお、この昇降手段13は、巻き掛け駆動機構やラックとピニオンとの噛合構造、又は流体圧シリンダ等を用いた昇降駆動構造等を用いたものに置換することも可能である。
マッサージ器7の伝動機構11は、図4〜図6に示すように左右両側へ揉み動作軸19及び叩き動作軸20を突出させた駆動ユニット21と、上記の動作軸19,20によって保持された左右一対の駆動アーム25と、各駆動アーム25の先端部に固定された左右一対の支持アーム26とを有している。
【0015】
上記した駆動ユニット21は、マッサージ用モータ10による回転動力から揉み動作軸19を介して駆動アーム25に左右動成分を取り出すことで揉み動作を行わせる状態と、マッサージ用モータ10による回転動力から叩き動作軸20を介して駆動アーム25に前後揺動成分を取り出すことで叩き動作を行わせる状態とを、所望に応じて切換可能になっている。
前記動作軸19,20は左右方向に互いに平行に配置されていて、駆動ユニット21のケースに夫々軸受を介して回転自在に支持されている。これらの動作軸19,20は、マッサージ用モータ10により伝動機構11を介して一方が選択されて図7に示す矢印A又はBの方向に回転駆動を受けるようになっている。
【0016】
叩き動作軸20の両端部に互いに逆方向に偏心した偏心軸部20A,20Aが設けられ、揉み動作軸19の両端部に傾斜軸部19A,19Aが設けられている。叩き動作軸20の偏心軸部20Aと揉み動作軸19の傾斜軸部19Aはリンク機構28によって連結されている。リンク機構28は板状の駆動アーム25と、該駆動アーム25に連結されたボールジョイント29と、該ボールジョイント29の軸部にピン30で連結された連結アーム31とで成っている。上記駆動アーム25は傾斜軸部19Aに回転自在に支持され、連結アーム31は偏心軸部20Aに揺動自在に取り付けられている。
【0017】
かくして、叩き動作軸20がA方向に回転すると、該叩き動作軸20の偏心軸部20Aは連結アーム31、ボールジョイント29、駆動アーム25及び支持アーム26を介して施療子8,9をA1方向(前後方向)に往復動せしめる。これにより施療子8,9は叩き運動を行う。なお、一方の偏心軸部20Aは他方の偏心軸部20Aに対して互いに反対方向に偏心しているので、左右に対応する施療子8,9は交互に叩き動作をする。
次に、揉み動作軸19が回転動力を受けると、傾斜軸部19Aは、円錐面を描くように回転するので、駆動アーム25はボールジョイント29を支点にして往復揺動運動を行い、その結果、左右に対応する施療子9は互いに接離するようにB1方向(左右方向)に往復揺動し、揉み動作をする。
【0018】
揉み動作軸19及び叩き動作軸20の一方を選択して回転させる機構は、例えば図6に示すように構成されている。
図6において、叩き動作軸20にはねじ歯車33が取り付けられ、揉み動作軸19にはウォーム歯車34が取り付けられている。上記叩き動作軸20及び揉み動作軸19の後方又は前方には上下方向に延びる案内軸35が配設され、該案内軸35には、上記ねじ歯車33と噛合するねじ歯車36と、上記ウォーム歯車34と噛合するウォーム37とが、上記案内軸35に対して回転自在に設けられている。
【0019】
案内軸35上のねじ歯車36とウォーム37には互いに向かい合う端面に、クラッチとして機能する係合歯部36A,37Aがそれぞれ形成されている。上記案内軸35には、上記ねじ歯車36とウォーム37との間の部分に台形ネジ部39が形成されており、ここに可動はすば歯車40がその内径で螺合している。該可動はすば歯車40の両端面には、上記係止歯部36A,37Aと解除可能に係合する係合歯部40A,40Aが形成されている。上記案内軸35と平行に回転駆動軸43が設けられていて、回転駆動軸43は、前記マッサージ用モータ10によってプーリ及びベルト等を介して矢印P,Qの方向に切り代えて回転駆動されるようになっている。
【0020】
回転駆動軸43にははすば歯車44が取りつけられており、上記可動はすば歯車40の外周面のはすばと噛合しており、回転駆動軸43をP方向に回転すると、はすば歯車44と噛合している可動斜視歯車40は回転するとともに案内軸35の台形ネジ部39上をR方向に移動し、該可動はすば歯車40の係合歯部40Aがねじ歯車36の係合歯部36Aと係合して該ねじ歯車36は回転駆動される。その結果、ねじ歯車36と噛合するねじ歯車33が取りつけられている叩き動作軸20がA方向に回転することとなる。次に、回転駆動軸43をP方向とは逆のQ方向に回転させると、可動はすば歯車40は、上記の動作とは逆に、R方向とは反対のS方向に移動し、ウォーム37と係合して上記揉み動作軸19をB方向に回転させる。
【0021】
かくして、回転駆動軸43を正逆回転させて可動はすば歯車40をR,S方向に一方へ選択的に移動させることにより、叩き動作軸20又は揉み動作軸19の一方を回転せしめ、複数の施療子8,9で叩き動作あるいは揉み動作を行うことができる。なお、上記ねじ歯車33,36はほぼ同じ歯数になっているので、単位時間当たり比較的多い回数で叩き動作をするのに対し、ウォーム37からウォーム歯車34へは大きく減速されて回転力が伝達されるので揉み動作はゆっくりと行われる。
【0022】
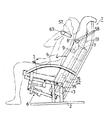
図1及び図2において、使用者の人体の特定部位に配置されるマッサージ機1の装備品として、枕体51が具備されている。これは、使用者がマッサージ機1に座って、マッサージを受ける場合には、使用者の頭の部分が少し、背中の部分よりも、前になった方がより自然でリラックス状態になることから、マッサージ機1に枕体51を設けるようにしたものである。
前記枕体51を支持する手段として、背凭れ部4の上部前面に左右一対の支持杆52が上下方向に配置固定され、この左右一対の支持杆52に枕体51の左右両側が上下摺動自在に外嵌保持され、これにより、枕体51が背凭れ部4の前面に上下調整自在に設けられている。支持杆52の上端部に固定した受け体53と枕体51との間に、蛇腹部材54が支持杆52に外嵌するように設けられている。使用者が枕体51を上方移動させながらマッサージ機1に座ると、枕体51が自重又は蛇腹部材54の付勢力によって自動的に下方に移動し、枕体51の下端部が使用者の肩に接当して停止し、これにより枕体51が使用者の頭部に配置されるようになっている。なお、前記蛇腹部材54に代えてコイルバネを支持杆52に外嵌するように設けてもよい。
【0023】
枕体51の下端部の後面側に、左右一対の磁性体57が左右一対の第一施療子8に対応するように設けられ、マッサージ器7の左右一対の第一施療子8の外周部にホール素子等により構成した磁気センサ58が等間隔をおいて複数個設けられており、マッサージ器7の昇降によって、第一施療子8が使用者の肩に対応する位置にきたとき、第一施療子8が枕体51の磁性体57に最も接近して、いずれかの磁気センサ58がオンするようになっている。前記磁性体57とマッサージ器7側の磁気センサ58とにより、枕体51のマッサージ機1に対する配置位置を検出する検出手段59が構成されている。
【0024】
次に、図3に示すマッサージ機1の制御系の構成を説明する。前記磁気センサ58により、枕体51とマッサージ器7との両者が互いに接近していることを検出(オン)した検出信号は、マイコン等で構成した制御部61に入力するようになっている。
また、図1に示すように、前記マッサージ器7(支持アーム26)が上下移動する上限位置に上限リミットスイッチS1が設けられると共に、下限位置に下限リミットスイッチS2が設けられており、マッサージ器7は、この上限位置と下限位置との間を上下移動するように制御部61により制御される。また、マッサージ器7の上下方向の移動位置を、昇降モータ16の回転数等によって検出する位置検出器62が設けられ、この位置検出器62により検出した検出信号を前記制御部61に入力するように構成されている。
【0025】
マイコン等で構成された前記制御部61は、自動コースのプログラム手順に従ってマッサージ用モータ10及び昇降モータ16を制御するようになっている。そして、制御部61は、リモコン63等で自動コースを選択したときの初期動作として、第一施療子8及び第二施療子9を使用者側に接当させた状態でマッサージ器7を使用者の人体に沿って上下に往復移動させる(マッサージ器7によりローリング動作を行う)。この際に、いずれかの磁気センサ58がオンしたときのマッサージ器7の移動位置との関係から、マッサージ機1に対する使用者の人体の特定部位である肩位置を判別するように構成されている。即ち、磁気センサ58のオンによって、枕体51とマッサージ器7とが互いに接近していることを検出手段59で検出し、このときの位置検出器62で検出したマッサージ器7の移動位置から、制御部61によって、マッサージ機1に対する使用者の特定部位である肩の位置を判別する。
【0026】
より具体的には、第一施療子8と第二施療子9とを使用者側に接当させた状態で、マッサージ器7を昇降させて、支持アーム26を駆動アーム25と共に使用者の人体に沿って上下方向に移動させることによって、第一施療子8が使用者の肩位置に達したとき、マッサージ機1の装備品である枕体58と、マッサージ器7との両者が互いに接近して磁気センサ58がオンし、検出手段59が枕体58のマッサージ機1に対する配置位置を検出する。この磁気センサー58(検出手段59)の検出信号は制御部61に入力され、制御部61は、このときのマッサージ器7の移動位置から、マッサージ機1に対する使用者の肩位置を判別するようになっている。
【0027】
ここで、ローリング動作とは、人体の背中に背骨に沿って約70mmの間隔で存在する経絡という経穴、即ちツボが並んでいる縦方向の直線部分を施療子8,9で刺激する効果的なマッサージ行為である。従って、通常揉み・叩き等の前に先立って行うとよいとされるマッサージ行為をいう。
上記実施の形態によれば、治療コースを実施する前に、使用者の肩位置にあわせて、枕体58をセットしておき、リモコン63等の操作により、使用者が希望する治療コースを選択した後、リモコン63等のスタートボタンを押すと、マッサージ器7が、上限位置を原点として、昇降を開始する。マッサージ器7を使用者の人体に沿って昇降移動させたとき、左右一対の支持アーム26の第一施療子8及び第二施療子9が使用者の肩、背、腰等に接当した状態で上下移動する。そして、マッサージ器7の上昇移動によって、第一施療子8が使用者の肩に対応する位置に達したとき、第一施療子8が枕体58の下端部に対応し、枕体58の磁性体57の磁力によって磁気センサ58がオンして、検出手段59が枕体58のマッサージ機1に対する配置位置を簡単かつ確実に検出する。このときの、位置検出器62で検出したマッサージ器7の移動位置(マッサージ器7の昇降位置)を、マッサージ機1に対する使用者の肩位置と判断して制御部61のメモリ部等に記録し、これより、磁気センサ58がオンしたときのマッサージ器7の移動位置(マッサージ器7の昇降位置)から、マッサージ機1に対する使用者の特定部位である肩位置を制御部61によって正確に判別する。なお、この情報は、治療コースにおける治療位置を演算処理するとき、必要に応じて、呼び出されるものである。
【0028】
このように、マッサージ機1に対する使用者の肩位置を正確に判別することにより、例えば、使用者の肩位置から、使用者の身体の所望部位の位置を正確に算出できるようになり、所望部位に第一施療子8又は第二施療子9を正確に移動して、当該所望部位を正確にマッサージすることができるようになり、マッサージの自動コース等により、より効果的なマッサージをなすことが可能になる。また、近年ブームになりつつあるツボ刺激をする場合においても、使用者の肩位置からツボ位置をある程度正確に特定できるようになり、ツボ刺激によるマッサージも効果的になし得るようになる。
【0029】
図7は他の実施の形態を示し、前記マッサージ機1の装備品として、枕体58に代えてマッサージ機1を操作するリモコン63を使用したものであり、リモコン63の一端部に磁性体57が組み込まれている。また、前記実施の形態の場合と同様に、マッサージ器7の左右一対の第一施療子8の外周部にホール素子等により構成した磁気センサ58が等間隔をおいて複数個設けられており、リモコン63の磁性体57とマッサージ器7側の磁気センサ58とにより、リモコン63のマッサージ機1に対する配置位置を検出する検出手段59が構成されている。その他の点は前記実施の形態の場合と同様の構成である。
【0030】
この場合、図7に示すように使用者がリモコン63を肩の位値に配置したとき、磁気センサ58のオンにより、検出手段59でこのリモコン63のマッサージ機1に対する配置位置を検出することによって、前記実施の形態の場合と同様に制御部61でマッサージ機1に対する使用者の特定部位の位置を判別するようになっている。
上記実施の形態によれば、リモコン63等で例えばマッサージの治療コースを選択してから、スタートボタンを押すと、マッサージ器7が昇降移動を開始する。その際、使用者は、自分の肩の上部に、リモコン63を置いて、マッサージ機1に自分の肩位置を教える操作を実施する。この際に、マッサージ器7が、昇降動作の途中において、第一施療子8が使用者の肩に対応する位置に達したとき、マッサージ器7の第一施療子8がリモコン63に対応し、リモコン63の磁性体57の磁力によって磁気センサ58がオンして、検出手段59が枕体58のマッサージ機1に対する配置位置を簡単かつ確実に検出する。このときの、位置検出器62で検出したマッサージ器7の移動位置(マッサージ器7の昇降位置)を、マッサージ機1に対する使用者の肩位置と判断して制御部61等に記録し、これより、磁気センサ58がオンしたときのマッサージ器7の移動位置(マッサージ器7の昇降位置)から、マッサージ機1に対する使用者の特定部位である肩位置を制御部61によって正確に判別する。その昇降位置を、制御部61のメモリ部等に書き込むこととなる。
【0031】
なお、前記実施の形態では、マッサージ器7の左右一対の第一施療子8の外周部にホール素子等により構成した磁気センサ58が等間隔をおいて複数個設けられているが、これに代え、左右一対の第一施療子8の外周部にホール素子等により構成した磁気センサ58を1個のみ設けるようにしてもよいし、また左右一対の第一施療子8のうち一方のみに磁気センサ58を設けるようにしてもよい。さらに、磁気センサ58を第一施療子8に代えて第二施療子9に設けるようにしてもよいし、マッサージ器7の第一施療子8及び第二施療子9以外の他の部分に磁気センサ58を設けるようにしてもよい。
【0032】
また、前記実施の形態では、枕体51又はリモコン63に磁性体57を設け、マッサージ器7側に磁気センサ58を設けているが、これとは逆に、枕体51又はリモコン63に磁気センサ58を設け、マッサージ器7側に磁性体51を設けるようにしてもよい。
また、前記実施の形態では、枕体51又はリモコン63側の磁性体57とマッサージ器7側の磁気センサ58とにより、枕体51又はリモコン63のマッサージ機1に対する配置位置を検出する検出手段59が構成されているが、これに代え、発光素子と受光素子とを有する光センサにより、枕体51又はリモコン63のマッサージ機1に対する配置位置を検出する検出手段59を構成するようにしてもよい。さらに、リミットスイッチ63、リードスイッチ66等を背凭れ部4の上部前面に、縦方向に列設しておき、これらリミットスイッチ63、リードスイッチ66等で枕体51等のマッサージ機1の装備品を直接検出して、オンしたリミットスイッチ63、リードスイッチ66の位置や個数によって、枕体51等のマッサージ機1に対する配置位置を検出して、これにより制御部61で使用者の肩位置を判別するようにしてもよい。
【0033】
また、前記実施の形態では、本願発明を、椅子型のマッサージ機に適用実施しているが、本願発明が適用されるマッサージ機は、椅子型のマッサージ機に限定されず、ベット式その他のマッサージ機にも適用実施することが可能である。また、本発明を、人体の脚部をマッサージするためのマッサージ機に適用し、肩位置ではなく使用者の膝位置や足首位置を判別するようにしてもよい。
なお、制御部61がマッサージ機1に対する使用者の肩位置を判別した際、音、画面表示、発光表示又は音声等による報知手段によって使用者に肩位置を判別したことを知らせるようにしてもよい。
【0034】
【発明の効果】
本発明によれば、簡単な構成でマッサージ機に対する使用者の肩位置等の特定部位の位置を簡単かつ正確に判別できるようになる。
【図面の簡単な説明】
【図1】本発明の一実施の形態を示すマッサージ機の全体側面図である。
【図2】同マッサージ機の上部の斜視図である。
【図3】同制御系のブロック図である。
【図4】同マッサージ器の斜視図である。
【図5】同マッサージの一部を示す正面図である。
【図6】同マッサージ器の伝達機構部分の斜視図である。
【図7】他の実施の形態を示すマッサージ機の全体側面図である。
【符号の説明】
1 椅子型マッサージ機
4 背凭れ部
7 マッサージ器
8 第一施療子
9 第二施療子
51 枕体
57 磁性体
58 磁気センサ
59 検出手段
61 制御部
63 リモコン
Claims (6)
- マッサージ動作する施療子を有するマッサージ器(7)が、使用者の人体に沿って移動自在に設けられた背凭れ部(4)を有するマッサージ機において、
使用者の人体の特定部位に配置される装備品が具備され、
該装備品が、マッサージ機の枕体(51)とされ、
該枕体(51)が背凭れ部(4)の前面に上下調整自在に設けられ、
使用者の頭部に配置された該枕体(51)の配置位置を検出する検出手段(59)が設けられ、
該検出手段(59)が該枕体(51)の配置位置を検出することによって、マッサージ機に対する使用者の特定部位の位置を判別するようにしたことを特徴とするマッサージ機。 - マッサージ動作する施療子を有するマッサージ器(7)が、使用者の人体に沿って移動自在に設けられた背凭れ部(4)を有するマッサージ機において、
使用者の人体の特定部位に配置されるマッサージ機の装備品が具備され、
該装備品が、マッサージ機の枕体(51)とされ、
該枕体(51)が背凭れ部(4)の前面に上下調整自在に設けられ、
使用者の頭部に配置された該枕体(51)とマッサージ器(7)との間に、両者が互いに接近していることを検出する検出手段(59)が設けられ、
検出手段(59)が検出したときのマッサージ器(7)の移動位置から、マッサージ機に対する使用者の特定部位の位置を判別するようにしたことを特徴とするマッサージ機。 - マッサージ動作する施療子を有するマッサージ器(7)が、使用者の人体に沿って移動自在に設けられたマッサージ機において、
該装備品が、マッサージ機を操作するリモコン(63)とされ、
リモコン(63)を使用者が該使用者の特定部位に配置したとき、該リモコン(63)のマッサージ機に対する配置位置を検出する検出手段(59)が設けられ、
該検出手段(59)によって検出した該リモコン(63)のマッサージ機に対する配置位置から、マッサージ機に対する使用者の特定部位の位置を判別するようにしたことを特徴とするマッサージ機。 - マッサージ動作する施療子を有するマッサージ器(7)が、使用者の人体に沿って移動自在に設けられたマッサージ機において、
該装備品が、マッサージ機を操作するリモコン(63)とされ、
リモコン(63)を使用者が該使用者の特定部位に配置したとき、該リモコン(63)とマッサージ器(7)との間に、両者が互いに接近していることを検出する検出手段(59)が設けられ、
検出手段(59)が検出したときのマッサージ器(7)の移動位置から、マッサージ機に対する使用者の特定部位の位置を判別するようにしたことを特徴とするマッサージ機。 - 前記検出手段(59)が、前記装備品又はマッサージ器(7)の一方に設けた磁性体(57)と、他方に設けた磁気センサ(58)とで構成されていることを特徴とする請求項1〜4のいずれかに記載のマッサージ機。
- 前記使用者の特定部位の位置として、マッサージ機に対する肩位置を判別するようにしたことを特徴とする請求項1〜5のいずれかに記載のマッサージ機。
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000008358A JP4249872B2 (ja) | 1999-09-09 | 2000-01-17 | マッサージ機 |
| JP2000163289A JP4171571B2 (ja) | 2000-05-31 | 2000-05-31 | マッサージ機 |
| PCT/JP2000/005808 WO2001019315A1 (fr) | 1999-09-09 | 2000-08-28 | Appareil de massage |
| EP08020080A EP2022458A3 (en) | 1999-09-09 | 2000-08-28 | Massaging apparatus |
| EP08020079A EP2022457A3 (en) | 1999-09-09 | 2000-08-28 | Massaging apparatus |
| EP00955077A EP1145700A4 (en) | 1999-09-09 | 2000-08-28 | Massage device |
| US09/830,560 US6832991B1 (en) | 1999-09-09 | 2000-08-28 | Massaging apparatus having pivotally supported supporting arm with therapeutic member |
| CNB008018030A CN1162138C (zh) | 1999-09-09 | 2000-08-28 | 按摩机 |
| KR10-2001-7005263A KR100524220B1 (ko) | 1999-09-09 | 2000-08-28 | 마사지기 |
| TW089117868A TW476647B (en) | 1999-09-09 | 2000-09-01 | Massaging apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000163289A JP4171571B2 (ja) | 2000-05-31 | 2000-05-31 | マッサージ機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001340410A JP2001340410A (ja) | 2001-12-11 |
| JP4171571B2 true JP4171571B2 (ja) | 2008-10-22 |
Family
ID=18667065
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000163289A Expired - Fee Related JP4171571B2 (ja) | 1999-09-09 | 2000-05-31 | マッサージ機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4171571B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5042737B2 (ja) * | 2007-07-24 | 2012-10-03 | ファミリー株式会社 | マッサージ機 |
| WO2009013865A1 (ja) * | 2007-07-24 | 2009-01-29 | Family Co., Ltd. | 椅子型マッサージ機 |
| JP5583903B2 (ja) * | 2008-11-25 | 2014-09-03 | パナソニック株式会社 | リラックス装置 |
| JP6436726B2 (ja) * | 2014-11-06 | 2018-12-12 | ファミリーイナダ株式会社 | 駆動機構 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10137317A (ja) * | 1996-11-15 | 1998-05-26 | Mitsubishi Electric Corp | 物理療法式治療装置 |
-
2000
- 2000-05-31 JP JP2000163289A patent/JP4171571B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001340410A (ja) | 2001-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TW476647B (en) | Massaging apparatus | |
| JP4723121B2 (ja) | マッサージ機 | |
| JP3992416B2 (ja) | マッサージ機 | |
| JP2009240688A (ja) | マッサージ機 | |
| JP4509987B2 (ja) | 椅子型マッサージ装置 | |
| JP2001238927A5 (ja) | ||
| JP4171571B2 (ja) | マッサージ機 | |
| JP2003250895A (ja) | 椅子型マッサージ機 | |
| JP4663915B2 (ja) | マッサージ機 | |
| JP6322370B2 (ja) | マッサージ機 | |
| JP4938183B2 (ja) | マッサージ機 | |
| JP5060078B2 (ja) | マッサージ機 | |
| JP2776869B2 (ja) | マッサージ機 | |
| JP4124028B2 (ja) | マッサージ機 | |
| JP4723122B2 (ja) | マッサージ機 | |
| JP4723120B2 (ja) | マッサージ機 | |
| JP2511451B2 (ja) | マツサ−ジ機 | |
| JP2006263033A (ja) | マッサージユニット | |
| JP2003334227A (ja) | マッサージ機 | |
| JP6389592B2 (ja) | 椅子型マッサージ機 | |
| JP2010148647A (ja) | 椅子型マッサージ機 | |
| JP2006334431A (ja) | 椅子型マッサージ装置 | |
| JP2002159551A (ja) | マッサージ機 | |
| JP4617275B2 (ja) | 椅子型マッサージ機 | |
| JP2004358277A (ja) | マッサージ機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060223 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060223 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080623 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080709 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080804 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080811 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110815 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110815 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110815 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120815 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120815 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120815 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130815 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130815 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |