
Deformation-Adapted Spatial Domain Filtering Algorithm for UAV Mining Subsidence Monitoring

<p>Location of the study area, working face, and observation line.</p> "> Figure 2
<p>Histogram of error distribution of conventional methods.</p> "> Figure 3
<p>Schematic diagram of surface inclination calculation. The arrows in the figure refer to the direction in which the sampling point is calculated along the x or y direction.</p> "> Figure 4
<p>Schematic diagram of mean filtering in spatial domain. The blue dots represent the four corners of the grid corresponding to each sampling point; the blue arrows point to the images representing the results after processing using the algorithm in this paper.</p> "> Figure 5
<p>Algorithm flow chart. The red dots in the graph represent the direction of the calculation along the x or y direction.</p> "> Figure 6
<p>Distribution of error intervals of sampling points after different grid treatments.</p> "> Figure 7
<p>Error proportion diagram under different grid intervals.</p> "> Figure 8
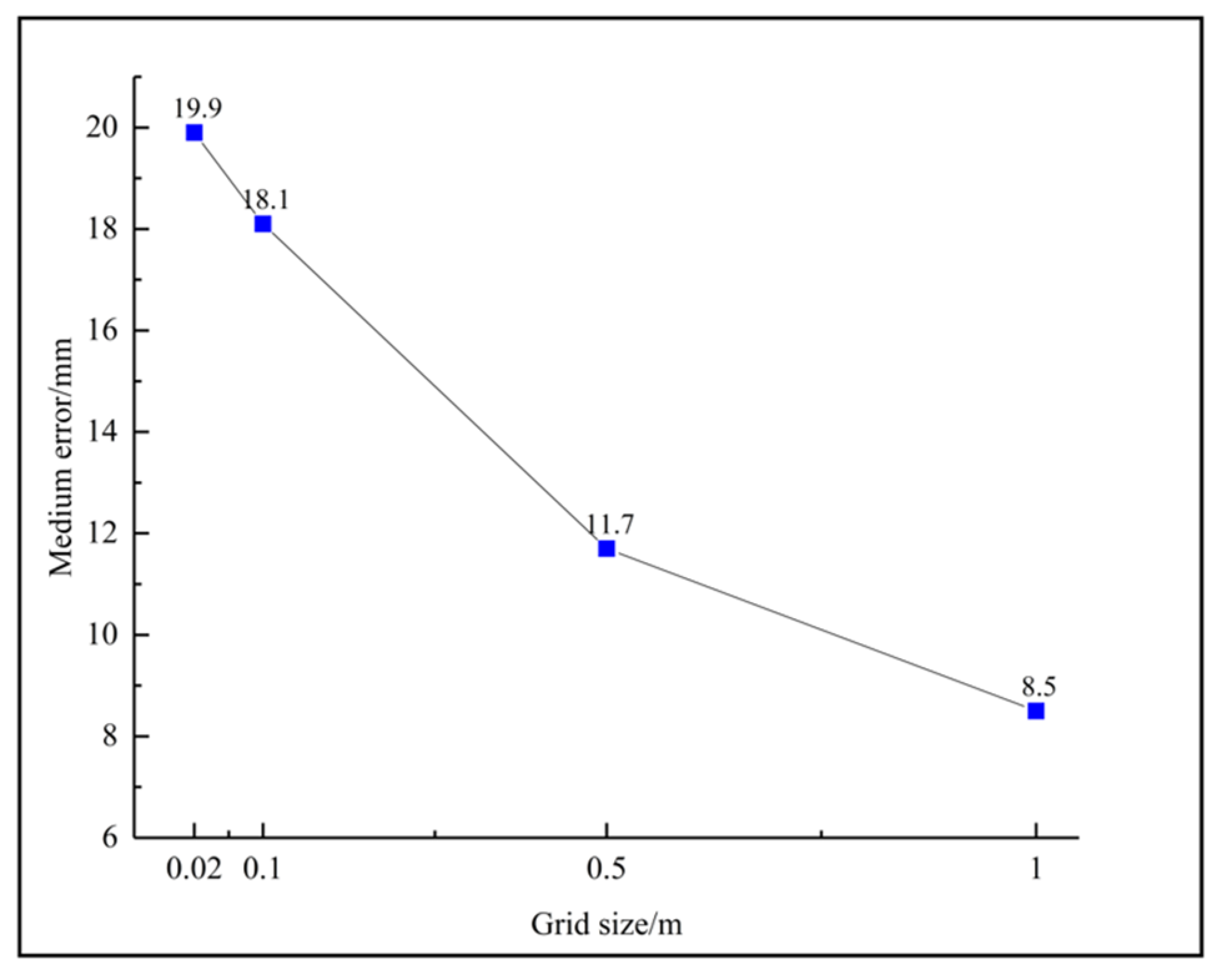
<p>Mean error of sampling points under different grid intervals.</p> "> Figure 9
<p>Road settlement map measured by UAV based on original data.</p> "> Figure 10
<p>Road settlement map obtained by spatial domain filtering.</p> "> Figure 11
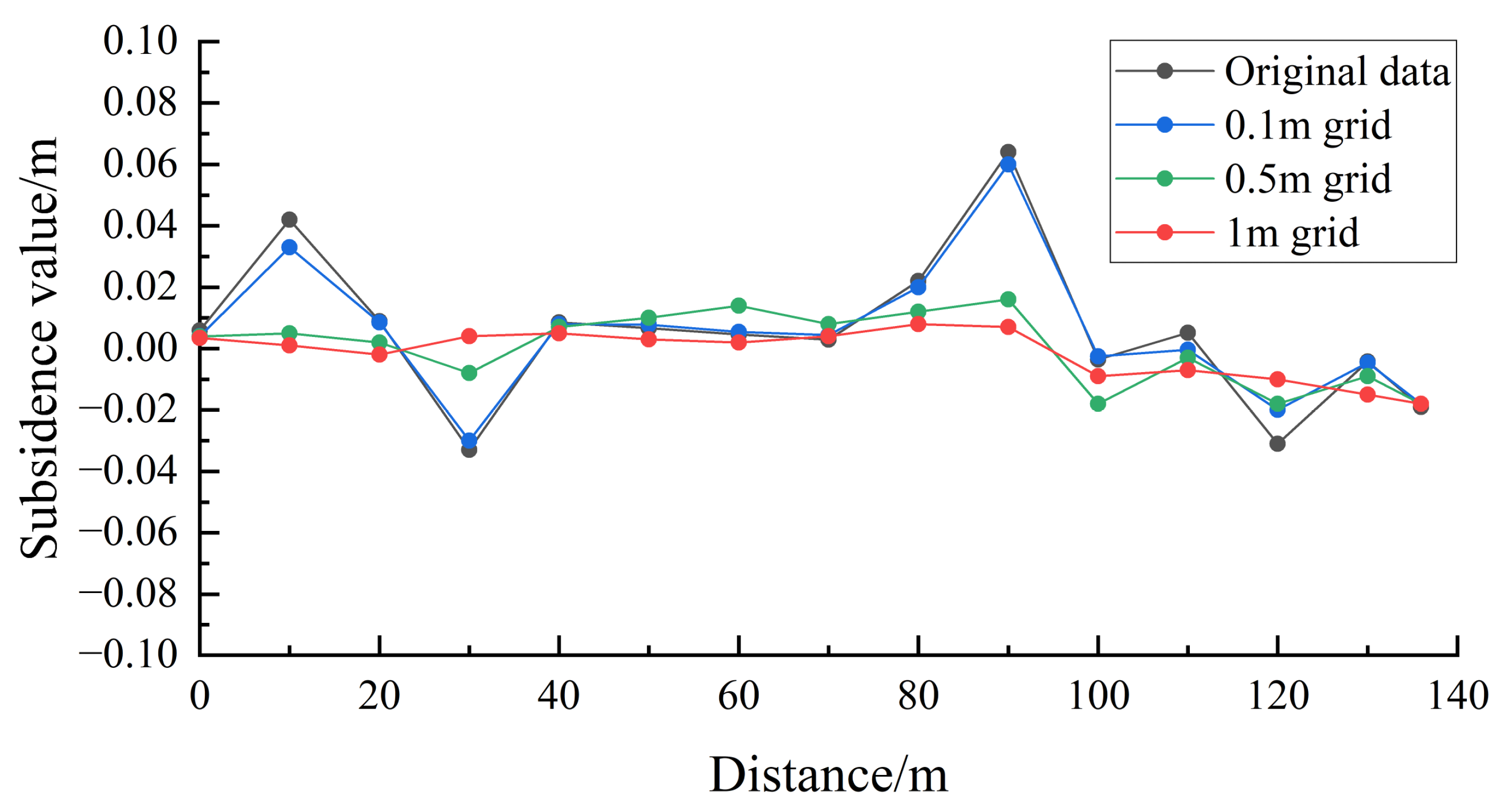
<p>Comparison of path changes for different grid sizes.</p> "> Figure 12
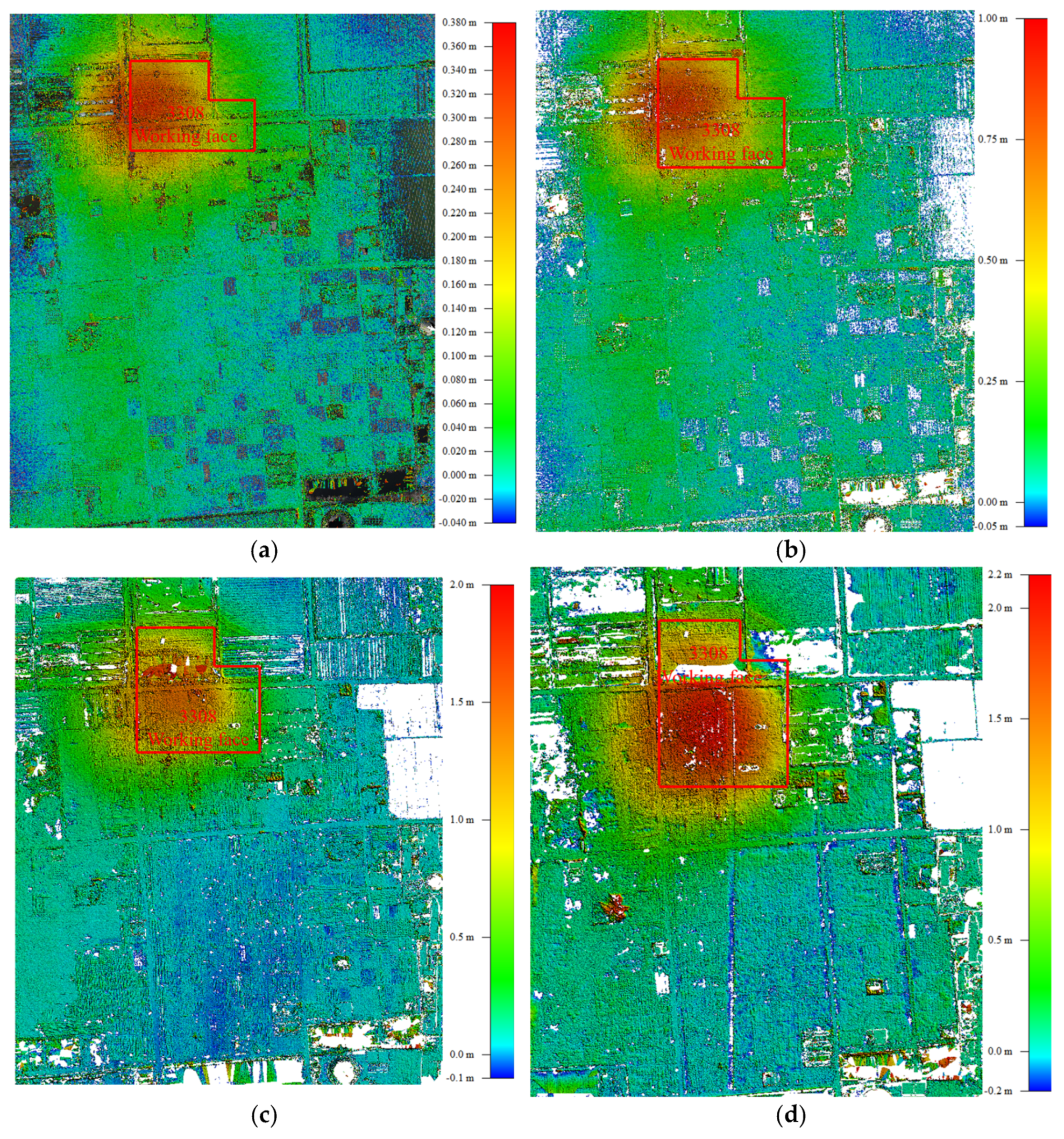
<p>Surface settlement maps obtained through the proposed algorithm. (<b>a</b>) Phase II. (<b>b</b>) Phase III. (<b>c</b>) Phase IV. (<b>d</b>) Phase V. (<b>e</b>) Phase VI. (<b>f</b>) Phase VII.</p> "> Figure 12 Cont.
<p>Surface settlement maps obtained through the proposed algorithm. (<b>a</b>) Phase II. (<b>b</b>) Phase III. (<b>c</b>) Phase IV. (<b>d</b>) Phase V. (<b>e</b>) Phase VI. (<b>f</b>) Phase VII.</p> "> Figure 13
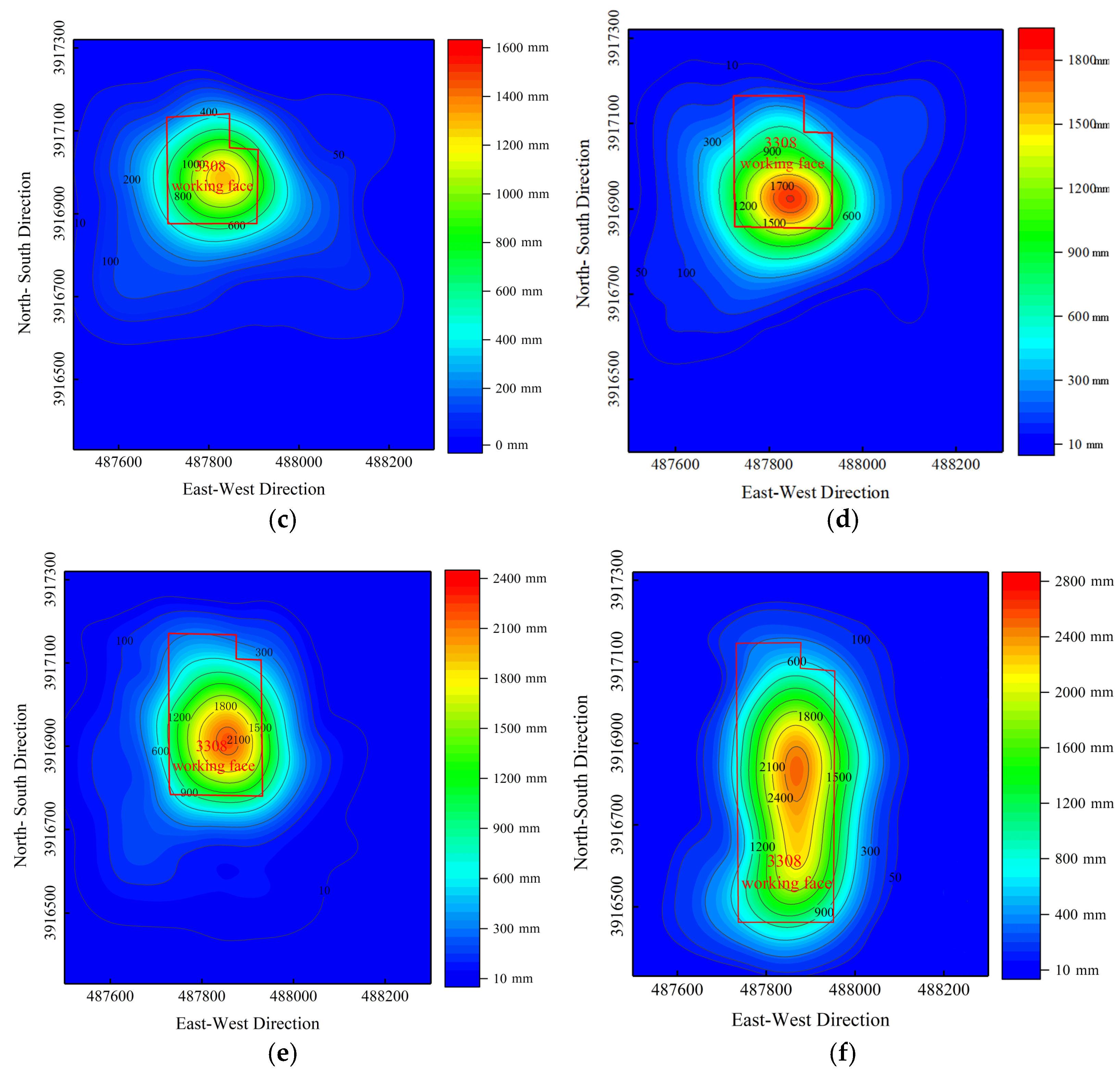
<p>Extracting the isoline map of surface subsidence by UAV. (<b>a</b>) Phase II isoline map of surface subsidence. (<b>b</b>) Phase III isoline map of surface subsidence. (<b>c</b>) Phase IV isoline map of surface subsidence. (<b>d</b>) Phase V isoline map of surface subsidence. (<b>e</b>) Phase VI isoline map of surface subsidence. (<b>f</b>) Phase VII isoline map of surface subsidence.</p> "> Figure 13 Cont.
<p>Extracting the isoline map of surface subsidence by UAV. (<b>a</b>) Phase II isoline map of surface subsidence. (<b>b</b>) Phase III isoline map of surface subsidence. (<b>c</b>) Phase IV isoline map of surface subsidence. (<b>d</b>) Phase V isoline map of surface subsidence. (<b>e</b>) Phase VI isoline map of surface subsidence. (<b>f</b>) Phase VII isoline map of surface subsidence.</p> "> Figure 14
<p>Accuracy assessment for different mining phases. (<b>a</b>) phase IV direction E-W. (<b>b</b>) phase IV direction N-S. (<b>c</b>) phase V direction E-W. (<b>d</b>) phase V direction N-S. (<b>e</b>) phase VI direction E-W. (<b>f</b>) phase VI direction N-S.</p> ">
Abstract
:1. Introduction
2. Overview of the Area
2.1. Overview of the Experimental Area
2.2. Overview of the Study Area
3. Materials
3.1. Data Sources
3.1.1. UAV Orthophoto Data
3.1.2. Validate Data
4. Principles and Methods
4.1. Data Characteristics
4.2. Error Distribution of Subsidence Basin Established by Conventional Method
4.3. Deformation-Adapted Spatial Domain Filtering Algorithm
- (1)
- DSM acquisition. UAV orthophotos were imported into Pix4DMapper software 2.0.104, and the DSM of the study area was generated through the steps of image feature point matching, Structure from Motion (SFM), multi-view stereo (MVS), and point cloud modeling;
- (2)
- Point cloud filtering. To remove non-ground points from the point cloud, the CFS filtering was used to separate the non-ground points from the DSM of the study area, retaining the ground point cloud data;
- (3)
- Hole filling. Since some regions are left empty after point cloud filtering, the empty parts are interpolated by using Kriging interpolation.
- (4)
- DEM reconstruction. The filtered ground point cloud data are rasterized to regenerate a higher precision DEM;
- (5)
- Define the size of the grid. Let us imagine the original DEM data as , where the subsidence value of each sampled point is and the size of the corresponding filter window centered around each sample point is . To achieve the conditions of adaptive mining deformation, the grid size can be determined based on the accuracy of the monitoring of drone subsidence and the magnitude of the tilt between neighboring sampling points. Using Formulas (1)–(3) to calculate the tilt value of the surface sampling points and using Formula (4) to calculate the size of the grid divided by these surface sampling points, i.e., the size of the filter grid,
- (6)
- Spatial domain filtering treatment for adaptive mining deformation. Let us define the data output after filtering therapy in this study as g. When the grid of each sampling point is divided according to Formula (4), since the subsidence difference in all sampling points within the grid is less than the measurement error of the UAV, i.e., the difference in subsidence values of all sampling points within each filtering window is negligible, the sampling points within the grid can be averaged and used as a substitute for the center of the grid, and the averaging of all the points is equivalent to the multiple observations on the sampling points, which helps to reduce the influence of random error on UAV monitoring. Through Formula (5), the filtering process for the point can be completed, and the resultant output is , as shown in Figure 4.
- (7)
- Accuracy Validation. In order to validate the method to enhance the accuracy, the validation is carried out by calculating the RMSE by means of Bessel’s correction. The RMSE is calculated according to Formula (6).
5. Results and Discussion
5.1. Simulation Experimental Results
5.2. Case Application Results
Accuracy Assessment
6. Conclusions
- (1)
- In this paper, we analyze the error distribution regulation in UAV measurement in depth with the previous research. We specifically research the error distribution characteristics in UAV elevation measurement while maintaining constant factors such as UAV flight control parameters and the layout and quality of GCPs. The results of the research show that the elevation measurement errors in UAV surveys follow a normal distribution, albeit influenced by the presence of systematic errors. The error distribution is characterized by bounded and dense.
- (2)
- Based on the characteristics of UAV measurement error distribution, this paper proposes a spatial domain filtering algorithm for UAV with mining deformation adaptation. As the random error can be averaged over several measurements to reduce the influence of random error, the algorithm in this paper avoids the huge workload caused by several measurements and achieves the effect of averaging over several measurements by reducing the resolution of the UAV. For the grid size division of sampling point, this paper utilizes the surface changes caused by coal mining surface subsidence combined with the drone measurement accuracy to automatically change the grid. Through the experiment, it can be seen that the method of this paper can greatly reduce the influence of random error in the measurement accuracy of the drone and can better meet the requirements of surface deformation monitoring in mining areas.
- (3)
- In the actual case application, the algorithm of this paper and the level data, in which the RMSE can be up to 8 mm, are compared with the present conventional method to obtain the RMSE of 13 mm, and the accuracy is improved by about 40%, which greatly improves the accuracy of UAV monitoring. This method provides a new technical path for accurately obtaining the deformation information of the coal mine subsidence area.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, D.; Deng, K.; Gao, X.; Niu, H. Monitoring and Analysis of Surface Subsidence in Mining Area Based on SBAS-InSAR. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 1531–1537. (In Chinese) [Google Scholar]
- Chen, Y.; Tao, Q.; Liu, G.; Wang, L.; Wang, F.; Wang, K. Detailed mining subsidence monitoring combined with InSAR and probability integral method. Chin. J. Geophys. 2021, 64, 3554–3566. (In Chinese) [Google Scholar]
- Yang, J.; Jiang, Y.; Zhou, J.; Huang, L.; Lu, X. Analysis on reliability and accuracy of subsidence measurement with gps technique. J. Geod. Geodyn. 2006, 26, 70–75. (In Chinese) [Google Scholar]
- Liu, G.; Zhang, L.; Cheng, S.; Jiang, T. Feasibility Analysis of Monitoring Mining Surface Substance Using InSAR/GPS Data Fusion. Bull. Surv. Mapp. 2005, 11, 13–16. (In Chinese) [Google Scholar]
- Wang, Z.; Zhang, J.; Huang, G. Precise monitoring and analysis of the land subsidence in Jining coal mining area based on InSAR technique. J. China Univ. Min. Technol. 2014, 43, 169–174. [Google Scholar]
- Deng, J.; Xu, Y. Three-dimensional Dynamie Monitoring and Analysis of Surface Deformation in Mining Area Based on Multi-track SAR Image. Metal Mine 2019, 10, 48–54. (In Chinese) [Google Scholar]
- Hu, L.; Navarro-Hernández, M.I.; Liu, X.; Tomás, R.; Tang, X.; Bru, G.; Ezquerro, P.; Zhang, Q. Analysis of regional large-gradient land subsidence in the Alto Guadalentín Basin (Spain) using open-access aerial LiDAR datasets. Remote Sens. Environ. 2022, 280, 113218. [Google Scholar] [CrossRef]
- Chen, B.; Deng, K.; Fan, H.; Hao, M. Large-scale deformation monitoring in mining area by D-InSAR and 3D laser scanning technology integration. Int. J. Min. Sci. Technol. 2013, 23, 555–561. [Google Scholar] [CrossRef]
- Chen, B.Q.; Deng, K.Z. Integration of D-InSAR technology and PSO-SVR algorithm for time series monitoring and dynamic prediction of coal mining subsidence. Surv. Rev. 2014, 46, 392–400. [Google Scholar] [CrossRef]
- Dong, L.; Wang, C.; Tang, Y.; Tang, F.; Zhang, H.; Wang, J.; Duan, W. Time Series InSAR Three-Dimensional Displacement Inversion Model of Coal Mining Areas Based on Symmetrical Features of Mining Subsidence. Remote Sens. 2021, 13, 2143. [Google Scholar] [CrossRef]
- Liu, G.S.; Lv, J.C. Research on key technologies for monitoring changes in mining areas based on unmanned aerial vehicles. Bull. Surv. Mapp. 2013, 95–98. (In Chinese) [Google Scholar]
- Sui, L.; Zhang, Y.; Zhang, S.; Chen, W. Filtering of airborne LiDAR point cloud data based on progressive TIN. Wuhan Daxue Xuebao (Xinxi Kexue Ban)/Geomat. Inf. Sci. Wuhan Univ. 2011, 36, 1159–1163. [Google Scholar]
- Polat, N.; Uysal, M. Investigating performance of Airborne LiDAR data filtering algorithms for DTM generation. Measurement 2015, 63, 61–68. [Google Scholar] [CrossRef]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Mengxia, Z.; Xinqi, Z.; Bo, L. Dynamic Monitoring Method for Mining Area Based on UAV Images. Bull. Surv. Mapp. 2017, 43–47. (In Chinese) [Google Scholar]
- Jianfeng, Z.; Pengcheng, Z.; Dejun, W.; Chenyang, M.; Chongwu, Z.; Hongwu, Y.; Dong, W. UAV aerial triangulation: Point error distributions and the influencing mechanisms of ground control points on its accuracy. Coal Geol. Explor. 2023, 51, 151–161. (In Chinese) [Google Scholar]
- Ćwiąkała, P.; Gruszczyński, W.; Stoch, T.; Puniach, E.; Mrocheń, D.; Matwij, W.; Matwij, K.; Nędzka, M.; Sopata, P.; Wójcik, A. UAV Applications for Determination of Land Deformations Caused by Underground Mining. Remote Sens. 2020, 12, 1733. [Google Scholar] [CrossRef]
- Cardenal, J.; Fernández, T.; Pérez-García, J.L.; Gómez-López, J.M. Measurement of Road Surface Deformation Using Images Captured from UAVs. Remote Sens. 2019, 11, 1507. [Google Scholar] [CrossRef]
- Liu, J.; Liu, X.; Lv, X.; Wang, B.; Lian, X. Novel Method for Monitoring Mining Subsidence Featuring Co-Registration of UAV LiDAR Data and Photogrammetry. Appl. Sci. 2022, 12, 9374. [Google Scholar] [CrossRef]
- Lian, X.-g.; Liu, X.-y.; Ge, L.; Hu, H.F.; Du, Z.; Wu, Y.-r. Time-series unmanned aerial vehicle photogrammetry monitoring method without ground control points to measure mining subsidence. J. Appl. Remote Sens. 2021, 15, 024505. [Google Scholar] [CrossRef]
- Zhou, D.; Qi, L.; Zhang, D.; Zhou, B.; Guo, L. Unmanned Aerial Vehicle (UAV) Photogrammetry Technology for Dynamic Mining Subsidence Monitoring and Parameter Inversion: A Case Study in China. IEEE Access 2020, 8, 16372–16386. [Google Scholar]
- Yang, X.; Yao, W.; Zheng, J.; Ma, B.; Ma, X. UAV terrain following technology application in the mining subsidence monitoring research. Bull. Surv. Mapp. 2021, 111–115. (In Chinese) [Google Scholar]
- Puniach, E.; Gruszczyński, W.; Stoch, T.; Mrocheń, D.; Ćwiąkała, P.; Sopata, P.; Pastucha, E.; Matwij, W. Determination of the coefficient of proportionality between horizontal displacement and tilt change using UAV photogrammetry. Eng. Geol. 2023, 312, 106939. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, W.; Lian, X.; Xu, X. Monitoring Mining Surface Subsidence with Multi-Temporal Three-Dimensional Unmanned Aerial Vehicle Point Cloud. Remote Sens. 2023, 15, 374. [Google Scholar] [CrossRef]
- Siafali, E.; Tsioras, P.A. An Innovative Approach to Surface Deformation Estimation in Forest Road and Trail Networks Using Unmanned Aerial Vehicle Real-Time Kinematic-Derived Data for Monitoring and Maintenance. Forests 2024, 15, 212. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameters | Project | Parameter |
|---|---|---|---|
| UAV model | DJI Phantom 4 RTK | Camera name | FC6130r |
| Maximum flight time/min | 30 | Camera pixel | 20 megapixels |
| Camera sensor | One inch COMOS | ||
| Pixel width/px | 5472 | ||
| Pixel high/px | 3648 |
| Time | Altitude/m | GSD/cm | Number of Images per Issue | Route Overlap | Lateral Overlap |
|---|---|---|---|---|---|
| 23 June 2023 | 50 | 1.4 | 104 | 85% | 75% |
| Date | Altitude/m | GSD/cm | Overlap Rate | Number of Images | Weather |
|---|---|---|---|---|---|
| 4 March 2021 | 25 | 0.7 | 80%/70% | 1109 | Sunny |
| 1 April 2021 | 25 | 0.7 | 80%/70% | 1091 | Sunny |
| 18 April 2021 | 25 | 0.7 | 80%/70% | 1100 | Cloudy |
| 21 May 2021 | 25 | 0.7 | 80%/70% | 1109 | Sunny |
| 10 June 2021 | 25 | 0.7 | 80%/70% | 1091 | Cloudy |
| 13 July 2021 | 25 | 0.7 | 80%/70% | 1100 | Sunny |
| 11 January 2022 | 25 | 0.7 | 80%/70% | 1100 | Sunny |
| Phase | RMSE in UAV Original Data Measurements (mm) | RMSE in UAV Proceed Data Measurements (mm) | Precision Improvement |
|---|---|---|---|
| Phase IV | 13 | 8 | 38.5% |
| Phase V | 18 | 11 | 38.9% |
| Phase VI | 20 | 12 | 40.0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zha, J.; Miao, P.; Ling, H.; Yu, M.; Sun, B.; Zhong, C.; Hao, G. Deformation-Adapted Spatial Domain Filtering Algorithm for UAV Mining Subsidence Monitoring. Sustainability 2024, 16, 8039. https://doi.org/10.3390/su16188039
Zha J, Miao P, Ling H, Yu M, Sun B, Zhong C, Hao G. Deformation-Adapted Spatial Domain Filtering Algorithm for UAV Mining Subsidence Monitoring. Sustainability. 2024; 16(18):8039. https://doi.org/10.3390/su16188039
Chicago/Turabian StyleZha, Jianfeng, Penglong Miao, Hukai Ling, Minghui Yu, Bo Sun, Chongwu Zhong, and Guowei Hao. 2024. "Deformation-Adapted Spatial Domain Filtering Algorithm for UAV Mining Subsidence Monitoring" Sustainability 16, no. 18: 8039. https://doi.org/10.3390/su16188039