JP4581660B2 - 車両用操舵装置 - Google Patents
車両用操舵装置 Download PDFInfo
- Publication number
- JP4581660B2 JP4581660B2 JP2004350371A JP2004350371A JP4581660B2 JP 4581660 B2 JP4581660 B2 JP 4581660B2 JP 2004350371 A JP2004350371 A JP 2004350371A JP 2004350371 A JP2004350371 A JP 2004350371A JP 4581660 B2 JP4581660 B2 JP 4581660B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- reaction force
- vehicle
- road surface
- steering wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000006243 chemical reaction Methods 0.000 claims description 72
- 238000006557 surface reaction Methods 0.000 claims description 52
- 238000012937 correction Methods 0.000 claims description 19
- 230000007246 mechanism Effects 0.000 claims description 10
- 238000001514 detection method Methods 0.000 claims description 8
- 230000001133 acceleration Effects 0.000 claims description 6
- 230000007423 decrease Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 description 14
- 230000000694 effects Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 230000009471 action Effects 0.000 description 6
- 238000007792 addition Methods 0.000 description 6
- 230000009467 reduction Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 230000009977 dual effect Effects 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 238000013178 mathematical model Methods 0.000 description 2
- 230000007306 turnover Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000007175 bidirectional communication Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
- B62D5/006—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback power actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0466—Controlling the motor for returning the steering wheel to neutral position
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
操舵入力を受けるハンドルと操向輪を転舵する操向輪転舵機構とが機械的に切り離されるとともに、路面から前記操向輪に作用する反力を取得し、前記ハンドルに対し前記取得した路面反力に基づく操舵反力付加量を付加する車両用操舵装置において、
前記ハンドルの切り増しと切り戻しを判定する切り増し切り戻し判定手段と、
前記ハンドルの切り戻し時には、切り増し時よりも前記操舵反力付加量を小さくする操舵反力補正手段と、
を備えることを特徴とする。
図1は実施例1の車両用操舵装置を示す全体システム図、図2は実施例1の車両用操舵装置におけるクラッチ部とケーブルコラム部とトルクセンサー部の各詳細図である。実施例1の車両用操舵装置は、(1)反力装置、(2)バックアップ装置、(3)転舵装置、(4)制御コントローラにより構成されている。以下、それぞれの構成を詳しく説明する。
反力装置は、舵角センサー1、エンコーダ2、トルクセンサー3,3、反力モータ5とを有して構成される。
バックアップ装置は、ケーブルコラム7とクラッチ9により構成されている。
前記クラッチ9は、コラムシャフト8aとプーリシャフト8bとの間に介装され、実施例1では電磁クラッチを用いている。図2(a)にクラッチ部の詳細を示す。クラッチ9は、電磁コイルに通電されると、磁束Φが発生する。このとき、アーマチュアが板ばねの復帰力に抗してロータのフランジに磁気吸着されるから、入力軸であるコラムシャフト8aと出力軸であるプーリシャフト8bは連結される。そして、ハンドル6が回転すると、その回転力がクラッチ9を介してケーブルコラム7のプーリに伝達され、ケーブルコラム7のプーリが回転すると、その回転力がクラッチ9を介してハンドル6に伝達される。また、電磁コイルへの通電を解除すると、磁束Φが消滅してアーマチュアが板ばねの復帰力によってロータから離間する。つまり、クラッチ9の伝達トルク容量は、電磁コイルの発生できる磁束Φを変えることで吸着力が変化するので任意に設定することができる。なお、通電するとクラッチを解除する方式を採っても良い。
転舵装置は、エンコーダ10、舵角センサー11、トルクセンサー12,12、転舵モータ14,14、ステアリング機構(操向輪転舵機構)15、操向輪16,16とを有して構成される。
制御コントローラは、2つの電源18,18により処理演算等を行う2つの制御コントローラ19,19により二重系が構成されている。
[反力モータ制御量算出]
制御コントローラ19では、下記の式(1)を用いて、反力モータ5の制御量Thを設定する。
Th=Kp×θ+Gf×F …(1)
ここで、Kpは操舵角分フィードバックゲイン、θは操舵角、Gfは路面反力分フィードバックゲイン、Fは路面反力であり、右辺第1項では、操舵角θに基づく操舵反力の制御量が設定され、右辺第2項では、路面反力Fに基づく制御量が設定されるため、路面からタイヤに作用する力の影響を操舵反力に反映させることができる。
Gf(Low)=(Low) …ハンドル切り戻し時
Gf(High)=(High) …ハンドル切り増し時
となる。(Low),(High)は、後述するマップ(図4)に基づいてそれぞれ決定するが、あらかじめ設定された定数としても良い。
Th=Kp×θ+Kd×dθ/dt+Kdd×d2θ/dt2+Gf×F …(2)
ここで、KdおよびKddはあらかじめ設定された定数である。
図3は、路面反力分フィードバックゲインGfの設定方法を示すフローチャートで、以下、各ステップについて説明する。
速い切り返しが必要なときほど、運転者はハンドル切り返し操作を阻害されたくないため、実施例1では、操舵角速度dθ/dtが大きいときほど、路面反力分のフィードバック量を小さめに設定する。
Gf(Low)=(Low)×L1 …ハンドル切り戻し時
Gf(High)=(High) …ハンドル切り増し時
となる。
実施例1では、車速Vが低いときほど速い切り返しが必要なシーンが多いことから、低速域ほどハンドル切り戻し時の路面反力分フィードバック量を小さめに設定している。すなわち、高速域になるほど、ハンドル操作に対して車両挙動が敏感となるため、ハンドル切り戻し時においても路面反力分のフィードバックが必要となってくる。一方、低速域での取り回し域などでは、スムーズなハンドル操作性が必要になってくるため、この点を考慮し、車速Vが小さいほどハンドル切り戻し時の路面反力分のフィードバック量が小さくなるように設定する。
Gf(Low)=(Low)×L1×L2 …ハンドル切り戻し時
Gf(High)=(High) …ハンドル切り増し時
となる。
特開平10−217988号公報に記載の車両用操舵装置では、操舵力演算器において、操舵力センサーの検出結果を基に操舵軸(ステアリングシャフト)に付与された操舵力Tを演算すると共に、操舵力Tが付与された方向に操舵軸を回転させるための制御量aT(aは操舵力ギア比に相当する係数)を演算している。
Mm=Gm×(aT−F) …(3)
なお、Gmは出力信号のゲインを示すゲイン係数である。
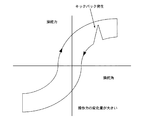
これに対し、実施例1の車両用操舵装置では、ハンドル切り戻し時には路面反力分フィードバックゲインGfを小さくすることにより、路面不整などにより路面反力が過渡的に増加した場合でも、キックバックに伴う操舵力の変化が抑制されるため、ハンドル取られを低減できる(図8)。
実施例1の車両用操舵装置にあっては、下記に列挙する効果が得られる。
[車両状態量に応じた制御量の設定]
ハンドル切り戻し時に路面反力分のフィードバック量を小さめに設定すると、全体の操舵反力が軽くなり過ぎる場合がある。この場合、車両状態量としてヨーレートを算出し、路面反力分のフィードバック量相当にあたる以下のゲイン定数Gyと、路面反力分のフィードバック量の低減相当分YDを算出し、これを反力モータ4の制御量に加えることで、操舵反力が軽くなり過ぎるのを防止できる。
Th=Kp×θ+Kd×dθ/dt+Kdd×d2θ/dt2+Ky×ψ+Gf×F …(4)
ヨーレートψは、操舵角θと車速Vと車両運動の数学モデルにより、下記の式(5)から得られる。
ψ={G×ωn2×Tr(s+1/Tr)×θ}/(s2+2ξωns+ω2) …(5)
ここで、
G={1/(1+A×V2)}×(V/L)
Tr=(2Lr×Kr)/(m×Lf×V)
A=−(m/2L2)×{(Lf×Kf−Lr×Kr)×(Kf×Kr)}
Lfは重心から前軸までの距離、Lrは重心から後軸までの距離、Kfは前輪のコーナリングフォース、Krは後輪のコーナリングフォース、mは車両重量、sはラプラス演算子
である。
よって、上記式(5)により得られた値を、ヨーレートψの推定値として用いる。
Yg=ψ×V …(6)
F∝Yg …(7)
したがって、
F∝ψ×V …(7)'
の関係が成り立つ。
YD=TfHigh'−TfLow' …(8)
このYDにあらかじめ設定したゲイン定数Gyをかけた値を、反力モータ5の制御量Thに加算する。
ここで、Gy=Gfとする(図10)。
ただし、これに限ったものではなく、例えば、Gy=AGfとして、高速域ではA=1とし、低速域になるほどAの値を小さくするように設定しても良い。
YD=TfHigh'−TfLow'×L1×L2 …(8)'
としても良い。
図11は、実施例2の切り返し操舵作用を示す図であり、実施例2では、実施例1に対し、操舵力に路面反力分のフィードバック量相当にあたるYDが加算されるため、横加速度やヨーには影響しないような路面反力変化のとき、キックバックに伴う操舵力の変化量を低減させつつ、操舵力が軽くなり過ぎるのを防止できる。
実施例2の車両用操舵装置にあっては、実施例1の効果(1)〜(3)に加え、以下の効果が得られる。
[路面反力分フィードバックゲインの設定]
図12は、実施例3の路面反力分フィードバックゲインGfの設定方法を示すフローチャートで、以下、各ステップについて説明する。
車両が旋回限界域にある場合、運転者は修正操舵により車両挙動を修正するが、このとき、ハンドル6の切り増しと切り戻しが頻繁かつ小刻みに行われる。このような場合には、路面反力分のフィードバック量を運転者に伝えた方が、車両挙動の修正コントロールが行いやすい。
実施例3の車両用操舵装置にあっては、実施例1の効果(1)〜(3)に加え、以下の効果が得られる。
以上、本発明の車両用操舵装置を実施例1〜実施例3に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
2 エンコーダ
3 トルクセンサー
5 反力モータ
6 ハンドル
7 ケーブルコラム
8a コラムシャフト
8b プーリシャフト
9 クラッチ
10 エンコーダ
11 舵角センサー
12 トルクセンサー
14 転舵モータ
15 ステアリング機構
16 操向輪
17 ピニオンシャフト
18 電源
19 制御コントローラ
20 双方向通信線
21 車速センサー
Claims (5)
- 操舵入力を受けるハンドルと操向輪を転舵する操向輪転舵機構とが機械的に切り離されるとともに、路面から前記操向輪に作用する反力を取得し、前記ハンドルに対し前記取得した路面反力に基づく操舵反力付加量を付加する車両用操舵装置において、
前記ハンドルの切り増しと切り戻しを判定する切り増し切り戻し判定手段と、
前記ハンドルの切り戻し時には、切り増し時よりも前記操舵反力付加量を小さくする操舵反力補正手段と、
を備えることを特徴とする車両用操舵装置。 - 請求項1に記載の車両用操舵装置において、
前記ハンドルの操舵角速度を検出する操舵角速度検出手段を備え、
前記操舵反力補正手段は、前記操舵角速度が高いほど前記操舵反力付加量を小さくすることを特徴とする車両用操舵装置。 - 請求項1または請求項2に記載の車両用操舵装置において、
車速を検出する車速検出手段を備え、
前記操舵反力補正手段は、車速が低いほど前記操舵反力付加量を小さくすることを特徴とする車両用操舵装置。 - 請求項1ないし請求項3のいずれか1項に記載の車両用操舵装置において、
車両状態量として車両のヨーレートと車速との積算値、または車両の横加速度を検出する車両状態量検出手段と、
前記車両状態量から前記操舵反力付加量に対する補正量を推定する操舵反力補正量推定手段とを備え、
前記操舵反力補正手段は、前記推定された補正量に応じた操舵反力付加量を付加することを特徴とする車両用操舵装置。 - 請求項1ないし請求項4のいずれか1項に記載の車両用操舵装置において、
前記操向輪の転舵角と車両のヨーレートに基づいて、車両が旋回限界にあるか否かを判定する旋回限界判定手段を備え、
前記操舵反力補正手段は、車両が旋回限界にあると判定されたとき、前記操舵反力付加量を小さくしないことを特徴とする車両用操舵装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004350371A JP4581660B2 (ja) | 2004-12-02 | 2004-12-02 | 車両用操舵装置 |
| US10/575,205 US7516812B2 (en) | 2004-12-02 | 2005-12-01 | Steering control apparatus and method |
| CN2005800008977A CN101421147B (zh) | 2004-12-02 | 2005-12-01 | 转向控制装置与方法 |
| EP05812061.9A EP1838566B1 (en) | 2004-12-02 | 2005-12-01 | Steering control apparatus and method |
| PCT/IB2005/003627 WO2006059214A2 (en) | 2004-12-02 | 2005-12-01 | Steering control apparatus and method |
| KR1020067010355A KR100803411B1 (ko) | 2004-12-02 | 2005-12-01 | 조향 제어 장치 및 방법 |
| CN2010101305780A CN101863285B (zh) | 2004-12-02 | 2005-12-01 | 转向控制装置与方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004350371A JP4581660B2 (ja) | 2004-12-02 | 2004-12-02 | 車両用操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006159963A JP2006159963A (ja) | 2006-06-22 |
| JP4581660B2 true JP4581660B2 (ja) | 2010-11-17 |
Family
ID=36565406
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004350371A Expired - Lifetime JP4581660B2 (ja) | 2004-12-02 | 2004-12-02 | 車両用操舵装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7516812B2 (ja) |
| EP (1) | EP1838566B1 (ja) |
| JP (1) | JP4581660B2 (ja) |
| KR (1) | KR100803411B1 (ja) |
| CN (2) | CN101421147B (ja) |
| WO (1) | WO2006059214A2 (ja) |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7604083B2 (en) * | 2005-06-07 | 2009-10-20 | Nissan Motor Co., Ltd. | Steering apparatus for a vehicle |
| GB0617052D0 (en) * | 2006-08-30 | 2006-10-11 | Agco Sa | Vehicle steering systems |
| KR100892480B1 (ko) * | 2007-11-27 | 2009-04-10 | 현대자동차주식회사 | 조향 복원토크 추정 시스템 |
| JP5162324B2 (ja) * | 2008-05-15 | 2013-03-13 | 株式会社豊田中央研究所 | 反力制御装置および反力設定方法 |
| JP5262754B2 (ja) * | 2009-01-26 | 2013-08-14 | 日産自動車株式会社 | ステアリング装置、ステアリング制御方法 |
| US20100301170A1 (en) * | 2009-05-29 | 2010-12-02 | Arin Boseroy | Control system for actuation system |
| CN101901556B (zh) * | 2009-05-31 | 2014-03-26 | 北京宣爱智能模拟技术股份有限公司 | 模拟转向盘操纵感觉力反馈转向系统及汽车模拟驾驶系统 |
| KR101461866B1 (ko) * | 2009-12-02 | 2014-11-13 | 현대자동차 주식회사 | 스티어 바이 와이어 시스템의 제어장치 및 방법 |
| CN101976521B (zh) * | 2010-10-12 | 2011-11-30 | 浙江大学 | 应用于驾驶模拟器的力反馈转向盘装置 |
| CN102087801A (zh) * | 2010-12-31 | 2011-06-08 | 北京宣爱智能模拟技术有限公司 | 汽车驾驶模拟器中方向盘自回中与力反馈的系统及方法 |
| CN102358342A (zh) * | 2011-09-09 | 2012-02-22 | 杭州赛奇高空作业机械有限公司 | 四轮驱动双转向行走装置及方法 |
| US9701337B2 (en) * | 2011-10-26 | 2017-07-11 | Nissan Motor Co., Ltd. | Steering control apparatus and steering control method |
| KR101724746B1 (ko) * | 2011-11-22 | 2017-04-07 | 현대자동차주식회사 | 노면에 따른 차량의 조향력 제어장치 및 방법 |
| JP5821659B2 (ja) * | 2011-12-22 | 2015-11-24 | トヨタ自動車株式会社 | 車両用操舵装置 |
| JP5825519B2 (ja) * | 2011-12-26 | 2015-12-02 | 株式会社ジェイテクト | 操舵装置 |
| JP5880954B2 (ja) * | 2012-03-22 | 2016-03-09 | 株式会社ジェイテクト | 車両用操舵装置 |
| CN102717826B (zh) * | 2012-06-25 | 2015-08-26 | 香港生产力促进局 | 车辆用电动助力转向系统回正控制的方法 |
| US9205867B2 (en) * | 2012-09-04 | 2015-12-08 | Nissan Motor Co., Ltd. | Stability control device |
| US9050999B2 (en) * | 2013-01-25 | 2015-06-09 | Caterpillar Inc | System with smart steering force feedback |
| EP2985206B1 (en) * | 2013-04-08 | 2017-10-04 | Mitsubishi Electric Corporation | Steering control device, and steering control method |
| US20140343697A1 (en) | 2013-05-17 | 2014-11-20 | Caterpillar Inc. | Selectable Operating Modes for Machine Operator Input Devices |
| CN103496395A (zh) * | 2013-10-09 | 2014-01-08 | 浙江达世元电动科技有限公司 | 一种用于新能源汽车的电动转向系统及电动转向控制方法 |
| CN205484398U (zh) * | 2015-12-25 | 2016-08-17 | 罗伯特·博世有限公司 | 传感装置、传感系统及转向系统 |
| CN105564527B (zh) * | 2016-01-07 | 2018-04-10 | 哈尔滨理工大学 | 一种重型载人足式机器人的线控转向操纵平台及操纵方法 |
| JP2018008570A (ja) * | 2016-07-12 | 2018-01-18 | 株式会社ジェイテクト | 操舵機構の制御装置 |
| JP2019064399A (ja) * | 2017-09-29 | 2019-04-25 | 株式会社Subaru | ステアリング装置 |
| KR102106290B1 (ko) * | 2018-09-21 | 2020-05-04 | 주식회사 만도 | Sbw 시스템에서 조향 반력 토크를 생성하는 장치 및 방법 |
| DE102018126337A1 (de) * | 2018-10-23 | 2020-04-23 | Schaeffler Technologies AG & Co. KG | Elektromechanische Lenkungsanordnung und Verfahren zum Betreiben einer Lenkanordnung |
| JP7221743B2 (ja) * | 2019-03-07 | 2023-02-14 | トヨタ自動車株式会社 | 車両制御システム |
| CN118632805A (zh) * | 2022-02-03 | 2024-09-10 | 株式会社捷太格特 | 转向操纵控制装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10230861A (ja) * | 1997-02-19 | 1998-09-02 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2002046639A (ja) * | 2000-08-07 | 2002-02-12 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2003154948A (ja) * | 2001-11-21 | 2003-05-27 | Koyo Seiko Co Ltd | 車両の操舵装置 |
| JP2004051022A (ja) * | 2002-07-22 | 2004-02-19 | Honda Motor Co Ltd | 車両の運転操作装置 |
| JP2004182058A (ja) * | 2002-12-03 | 2004-07-02 | Toyoda Mach Works Ltd | ステアリング制御装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19923012A1 (de) * | 1999-05-20 | 2000-11-23 | Zahnradfabrik Friedrichshafen | Lenkvorrichtung und Lenkverfahren |
| JP3696466B2 (ja) * | 2000-01-31 | 2005-09-21 | 光洋精工株式会社 | 車両用操舵装置 |
| DE60209847T2 (de) * | 2001-11-23 | 2006-10-12 | Conception Et Development Michelin S.A. | Elektrische Lenkung für Fahrzeuge |
| JP3935409B2 (ja) * | 2002-08-27 | 2007-06-20 | 富士重工業株式会社 | 電動式パワーステアリング装置 |
| JP3894886B2 (ja) * | 2002-12-27 | 2007-03-22 | 本田技研工業株式会社 | 車両用操舵装置 |
| JP4286834B2 (ja) * | 2003-05-16 | 2009-07-01 | 三菱電機株式会社 | 操舵制御装置 |
| JP3867682B2 (ja) * | 2003-05-29 | 2007-01-10 | 日産自動車株式会社 | 車両用操舵装置 |
| JP4242233B2 (ja) * | 2003-08-22 | 2009-03-25 | 富士重工業株式会社 | ステアリング制御装置 |
-
2004
- 2004-12-02 JP JP2004350371A patent/JP4581660B2/ja not_active Expired - Lifetime
-
2005
- 2005-12-01 EP EP05812061.9A patent/EP1838566B1/en active Active
- 2005-12-01 CN CN2005800008977A patent/CN101421147B/zh active Active
- 2005-12-01 KR KR1020067010355A patent/KR100803411B1/ko active Active
- 2005-12-01 CN CN2010101305780A patent/CN101863285B/zh active Active
- 2005-12-01 US US10/575,205 patent/US7516812B2/en active Active
- 2005-12-01 WO PCT/IB2005/003627 patent/WO2006059214A2/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10230861A (ja) * | 1997-02-19 | 1998-09-02 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2002046639A (ja) * | 2000-08-07 | 2002-02-12 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2003154948A (ja) * | 2001-11-21 | 2003-05-27 | Koyo Seiko Co Ltd | 車両の操舵装置 |
| JP2004051022A (ja) * | 2002-07-22 | 2004-02-19 | Honda Motor Co Ltd | 車両の運転操作装置 |
| JP2004182058A (ja) * | 2002-12-03 | 2004-07-02 | Toyoda Mach Works Ltd | ステアリング制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006159963A (ja) | 2006-06-22 |
| US20080230300A1 (en) | 2008-09-25 |
| EP1838566A2 (en) | 2007-10-03 |
| KR20070007768A (ko) | 2007-01-16 |
| EP1838566A4 (en) | 2016-02-17 |
| CN101863285B (zh) | 2012-03-07 |
| WO2006059214A3 (en) | 2009-04-16 |
| US7516812B2 (en) | 2009-04-14 |
| CN101421147A (zh) | 2009-04-29 |
| CN101421147B (zh) | 2010-09-15 |
| CN101863285A (zh) | 2010-10-20 |
| WO2006059214A2 (en) | 2006-06-08 |
| EP1838566B1 (en) | 2017-02-15 |
| KR100803411B1 (ko) | 2008-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4581660B2 (ja) | 車両用操舵装置 | |
| JP3493568B2 (ja) | 自動車の舵取装置 | |
| JP4604566B2 (ja) | 車両用操舵装置 | |
| JP5327331B2 (ja) | 車両の電動パワーステアリング装置 | |
| WO2017002570A1 (ja) | パワーステアリング装置の制御装置及びパワーステアリング装置 | |
| US20080249685A1 (en) | Steering Control Apparatus and Method | |
| US10807637B2 (en) | Steering control device | |
| JP5860568B2 (ja) | パワーステアリング装置及びこれに用いる制御装置 | |
| JP4640473B2 (ja) | 車両の操舵装置 | |
| JP5141311B2 (ja) | 車両制御装置 | |
| JP5416722B2 (ja) | 電動パワーステアリング装置 | |
| JP3176900B2 (ja) | 車両用操舵装置 | |
| JP2940371B2 (ja) | 車両用補助舵角制御装置 | |
| JP4419932B2 (ja) | 車両転舵制御装置 | |
| JP4626375B2 (ja) | 車両用操舵制御装置 | |
| JP5427796B2 (ja) | 電動パワーステアリング装置 | |
| JP4492289B2 (ja) | パワーステアリング装置 | |
| JP5427797B2 (ja) | 電動パワーステアリング装置 | |
| JP4876433B2 (ja) | 車両用操舵制御装置 | |
| JP2008189006A (ja) | 電動パワーステアリング装置 | |
| JP2005193779A (ja) | 車両用操舵装置 | |
| JP2011084157A (ja) | 電動パワーステアリング装置 | |
| KR102552648B1 (ko) | Sbw 시스템의 조향휠 반력 토크 신호 생성 장치 및 방법, 그를 포함하는 sbw 조향 장치 | |
| JP2004090878A (ja) | 電動パワーステアリング装置 | |
| JP2007020354A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071029 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091218 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100803 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100816 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4581660 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130910 Year of fee payment: 3 |