JP4407741B2 - 車両およびその制御方法 - Google Patents
車両およびその制御方法 Download PDFInfo
- Publication number
- JP4407741B2 JP4407741B2 JP2007301286A JP2007301286A JP4407741B2 JP 4407741 B2 JP4407741 B2 JP 4407741B2 JP 2007301286 A JP2007301286 A JP 2007301286A JP 2007301286 A JP2007301286 A JP 2007301286A JP 4407741 B2 JP4407741 B2 JP 4407741B2
- Authority
- JP
- Japan
- Prior art keywords
- power
- accelerator
- vehicle
- setting
- amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
- B60W2540/106—Rate of change
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/105—Output torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/24—Energy storage means
- B60W2710/242—Energy storage means for electrical energy
- B60W2710/244—Charge state
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
燃料の供給を受けて発電可能な発電手段と、
走行用の動力を出力可能な電動機と、
前記発電手段および前記電動機と電力のやりとりが可能な蓄電手段と、
走行に要求される要求駆動力を設定する要求駆動力設定手段と、
過去の少なくともアクセル操作に基づいて前記蓄電手段の蓄電量を管理するための管理用蓄電量範囲の中心蓄電量を設定する中心蓄電量設定手段と、
前記蓄電手段の蓄電量が前記設定された中心蓄電量に基づいて管理されると共に前記設定された要求駆動力に基づく駆動力により走行するよう前記発電手段と前記電動機とを制御する制御手段と、
を備えることを要旨とする。
燃料の供給を受けて発電可能な発電手段と、走行用の動力を出力可能な電動機と、前記発電手段および前記電動機と電力のやりとりが可能な蓄電手段と、を備える車両の制御方法であって、
過去の少なくともアクセル操作に基づいて前記蓄電手段の蓄電量を管理するための管理用蓄電量範囲の中心蓄電量を設定し、前記蓄電手段の蓄電量が前記設定した中心蓄電量に基づいて管理されると共に走行に要求される要求駆動力に基づく駆動力により走行するよう前記発電手段と前記電動機とを制御する、
ことを特徴とする。
Tm1*=-ρ・Te*/(1+ρ)+k1(Nm1*-Nm1)+k2∫(Nm1*-Nm1)dt (2)
Tm2min=(Win-Tm1*・Nm1)/Nm2 (4)
Tm2max=(Wout-Tm1*・Nm1)/Nm2 (5)
Tm2*=max(min(Tm2tmp,Tm2max),Tm2min) (6)
Claims (12)
- 燃料の供給を受けて発電可能な発電手段と、
走行用の動力を出力可能な電動機と、
前記発電手段および前記電動機と電力のやりとりが可能な蓄電手段と、
走行に要求される要求駆動力を設定する要求駆動力設定手段と、
過去のアクセル操作およびブレーキ操作に基づいて前記蓄電手段の蓄電量を管理するための管理用蓄電量範囲の中心蓄電量を設定する中心蓄電量設定手段と、
前記蓄電手段の蓄電量が前記設定された中心蓄電量に基づいて管理されると共に前記設定された要求駆動力に基づく駆動力により走行するよう前記発電手段と前記電動機とを制御する制御手段と、
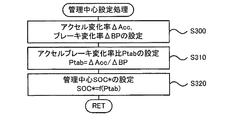
を備える車両。 - 前記中心蓄電量設定手段は、過去の所定時間におけるアクセル操作量の単位時間あたりの変化量であるアクセル変化率と前記所定時間におけるブレーキ操作量の単位時間あたりの変化量であるブレーキ変化率とに基づいて前記中心蓄電量を設定する手段である請求項1記載の車両。
- 請求項2記載の車両であって、
前記アクセル変化率は、前記アクセル操作量が大きくなる際の該アクセル操作量の単位時間あたりの変化量であり、
前記ブレーキ変化率は、前記ブレーキ操作量が大きくなる際の該ブレーキ操作量の単位時間あたりの変化量である、
車両。 - 前記中心蓄電量設定手段は、前記アクセル変化率が前記ブレーキ変化率に比して大きいほど大きくなる傾向に前記中心蓄電量を設定する手段である請求項3記載の車両。
- 前記中心蓄電量設定手段は、過去の所定時間のうち前記アクセル操作が行なわれた時間であるアクセル時間と前記所定時間のうち前記ブレーキ操作が行なわれた時間であるブレーキ時間とに基づいて前記中心蓄電量を設定する手段である請求項1記載の車両。
- 前記中心蓄電量設定手段は、前記アクセル時間が前記ブレーキ時間に比して長いほど大きくなる傾向に前記中心蓄電量を設定する手段である請求項5記載の車両。
- 前記中心蓄電量設定手段は、走行用に出力される駆動力である走行用駆動力と車両の加速度とに基づいて車重を演算すると共に過去の前記アクセル操作および前記ブレーキ操作と該演算した車重と車速とに基づいて前記中心蓄電量を設定する手段である請求項1ないし6のいずれか1つの請求項に記載の車両。
- 請求項1ないし7のいずれか1つの請求項に記載の車両であって、
前記要求駆動力設定手段は、前記アクセル操作および前記ブレーキ操作に基づいて前記要求駆動力を設定する手段であり、
前記中心蓄電量設定手段は、過去の前記設定された要求駆動力に基づいて前記中心蓄電量を設定する手段である、
車両。 - 請求項1ないし7のいずれか1つの請求項に記載の車両であって、
前記要求駆動力設定手段は、前記アクセル操作および前記ブレーキ操作に基づいて前記要求駆動力を設定する手段であり、
前記制御手段は、前記設定された要求駆動力に基づいて前記電動機の目標駆動状態を設定すると共に該設定した目標駆動状態で前記電動機が駆動されるよう該電動機を制御する手段であり、
前記中心蓄電量設定手段は、過去の前記電動機の駆動状態に基づいて前記中心蓄電量を設定する手段である、
車両。 - 前記発電手段は、内燃機関と、該内燃機関からの動力の少なくとも一部を用いて発電可能な発電機と、を備える手段である請求項1ないし9のいずれか1つの請求項に記載の車両。
- 請求項10記載の車両であって、
前記発電手段は、車軸に連結された駆動軸と前記内燃機関の出力軸と前記発電機の回転軸との3軸に接続され、該3軸のうちのいずれか2軸に入出力される動力に基づいて残余の軸に動力を入出力する3軸式動力入出力手段を備える手段であり、
前記電動機は、前記駆動軸に動力を入出力可能である、
車両。 - 燃料の供給を受けて発電可能な発電手段と、走行用の動力を出力可能な電動機と、前記発電手段および前記電動機と電力のやりとりが可能な蓄電手段と、を備える車両の制御方法であって、
過去のアクセル操作およびブレーキ操作に基づいて前記蓄電手段の蓄電量を管理するための管理用蓄電量範囲の中心蓄電量を設定し、前記蓄電手段の蓄電量が前記設定した中心蓄電量に基づいて管理されると共に走行に要求される要求駆動力に基づく駆動力により走行するよう前記発電手段と前記電動機とを制御する、
ことを特徴とする車両の制御方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007301286A JP4407741B2 (ja) | 2007-11-21 | 2007-11-21 | 車両およびその制御方法 |
| CN200880117190A CN101868389A (zh) | 2007-11-21 | 2008-11-13 | 车辆及控制车辆的方法 |
| EP08852633A EP2209684A2 (en) | 2007-11-21 | 2008-11-13 | Vehicle and method of controlling the vehicle |
| PCT/IB2008/003051 WO2009066145A2 (en) | 2007-11-21 | 2008-11-13 | Vehicle and method of controlling the vehicle |
| US12/743,923 US20100250042A1 (en) | 2007-11-21 | 2008-11-13 | Vehicle and method of controlling the vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007301286A JP4407741B2 (ja) | 2007-11-21 | 2007-11-21 | 車両およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009126259A JP2009126259A (ja) | 2009-06-11 |
| JP4407741B2 true JP4407741B2 (ja) | 2010-02-03 |
Family
ID=40544697
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007301286A Expired - Fee Related JP4407741B2 (ja) | 2007-11-21 | 2007-11-21 | 車両およびその制御方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20100250042A1 (ja) |
| EP (1) | EP2209684A2 (ja) |
| JP (1) | JP4407741B2 (ja) |
| CN (1) | CN101868389A (ja) |
| WO (1) | WO2009066145A2 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8311718B2 (en) * | 2009-09-04 | 2012-11-13 | GM Global Technology Operations LLC | Negative wheel slip control systems and methods |
| JP5573461B2 (ja) * | 2010-07-27 | 2014-08-20 | トヨタ自動車株式会社 | 車両制御システム |
| JP5360157B2 (ja) * | 2011-08-02 | 2013-12-04 | 株式会社デンソー | 電力送受電システム |
| JP5682515B2 (ja) * | 2011-09-08 | 2015-03-11 | 三菱自動車工業株式会社 | ハイブリッド電気自動車の制御装置 |
| JP5729489B2 (ja) * | 2011-12-28 | 2015-06-03 | トヨタ自動車株式会社 | 減速因子推定装置 |
| US10024878B2 (en) | 2012-02-03 | 2018-07-17 | Toyota Jidosha Kabushiki Kaisha | Decelerating factor estimating device |
| JP2014162452A (ja) * | 2013-02-27 | 2014-09-08 | Aisin Seiki Co Ltd | 駆動力制御装置 |
| US8892291B2 (en) * | 2013-03-12 | 2014-11-18 | Ford Global Technologies, Llc | Vehicle mass detection system |
| CA2898300C (en) | 2013-03-15 | 2020-10-27 | Allison Transmission, Inc. | Service disconnect interlock system and method for hybrid vehicles |
| EP2969640B1 (en) | 2013-03-15 | 2019-09-04 | Allison Transmission, Inc. | System and method for balancing states of charge of energy storage modules in hybrid vehicles |
| DE102013205314B4 (de) * | 2013-03-26 | 2016-09-29 | Continental Automotive Gmbh | Verfahren zum Betreiben einer Rekuperationsbremseinrichtung eines Kraftfahrzeugs und Rekuperationsbremseinrichtung für ein Kraftfahrzeug |
| JP6149772B2 (ja) * | 2014-03-24 | 2017-06-21 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6424731B2 (ja) * | 2015-05-13 | 2018-11-21 | トヨタ自動車株式会社 | 車両制御装置 |
| JP6769147B2 (ja) * | 2016-07-15 | 2020-10-14 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| KR102343956B1 (ko) * | 2017-07-31 | 2021-12-27 | 현대자동차주식회사 | 하이브리드 자동차 및 그를 위한 주행 모드 제어 방법 |
| JP6864611B2 (ja) * | 2017-12-07 | 2021-04-28 | 株式会社豊田中央研究所 | 車両の制御装置 |
| US20250052207A1 (en) * | 2023-08-11 | 2025-02-13 | GM Global Technology Operations LLC | System and method for improving turbocharged engine driver torque response |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3211699B2 (ja) * | 1996-09-17 | 2001-09-25 | トヨタ自動車株式会社 | 動力出力装置 |
| US6687581B2 (en) * | 2001-02-07 | 2004-02-03 | Nissan Motor Co., Ltd. | Control device and control method for hybrid vehicle |
| JP3707411B2 (ja) * | 2001-09-28 | 2005-10-19 | トヨタ自動車株式会社 | 動力出力装置およびこれを備える自動車 |
| US8022674B2 (en) * | 2007-07-10 | 2011-09-20 | Toyota Motor Engineering & Manufacturing North America, Inc. | State of charge control method and systems for vehicles |
-
2007
- 2007-11-21 JP JP2007301286A patent/JP4407741B2/ja not_active Expired - Fee Related
-
2008
- 2008-11-13 CN CN200880117190A patent/CN101868389A/zh active Pending
- 2008-11-13 WO PCT/IB2008/003051 patent/WO2009066145A2/en active Application Filing
- 2008-11-13 US US12/743,923 patent/US20100250042A1/en not_active Abandoned
- 2008-11-13 EP EP08852633A patent/EP2209684A2/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| WO2009066145A2 (en) | 2009-05-28 |
| JP2009126259A (ja) | 2009-06-11 |
| US20100250042A1 (en) | 2010-09-30 |
| WO2009066145A3 (en) | 2009-12-17 |
| CN101868389A (zh) | 2010-10-20 |
| EP2209684A2 (en) | 2010-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4407741B2 (ja) | 車両およびその制御方法 | |
| JP4453746B2 (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP4345824B2 (ja) | 車両およびその制御方法 | |
| JP4086018B2 (ja) | ハイブリッド車およびその制御方法並びに動力出力装置 | |
| JP4513882B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2009126258A (ja) | 車両およびその制御方法 | |
| JP2009126257A (ja) | 車両およびその制御方法 | |
| JP5200924B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4229105B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2010064522A (ja) | 車両およびその制御方法 | |
| JP4345765B2 (ja) | 車両およびその制御方法 | |
| JP4248553B2 (ja) | 車両およびその制御方法 | |
| JP4992810B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4301252B2 (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP2009262866A (ja) | ハイブリッド車およびその制御方法 | |
| JP2009184387A (ja) | ハイブリッド車およびその制御方法 | |
| JP2009227074A (ja) | ハイブリッド車およびその制御方法 | |
| JP2007116773A (ja) | 駆動装置およびこれを搭載する車両並びに駆動装置の制御方法 | |
| JP2008162346A (ja) | 動力出力装置およびその制御方法並びに車両 | |
| JP4258519B2 (ja) | 車両およびその制御方法 | |
| JP2007137266A (ja) | ハイブリッド車およびその制御方法 | |
| JP4983626B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP2009137384A (ja) | 車両および駆動装置並びに車両の制御方法 | |
| JP2009166659A (ja) | 車両およびその制御方法 | |
| JP2008239074A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法,駆動装置,駆動装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090924 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091020 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091102 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121120 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121120 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131120 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |