JP7415824B2 - 拡張モジュール、cpuモジュール、システム、及び通信方法 - Google Patents
拡張モジュール、cpuモジュール、システム、及び通信方法 Download PDFInfo
- Publication number
- JP7415824B2 JP7415824B2 JP2020113186A JP2020113186A JP7415824B2 JP 7415824 B2 JP7415824 B2 JP 7415824B2 JP 2020113186 A JP2020113186 A JP 2020113186A JP 2020113186 A JP2020113186 A JP 2020113186A JP 7415824 B2 JP7415824 B2 JP 7415824B2
- Authority
- JP
- Japan
- Prior art keywords
- serial bus
- communication function
- module
- expansion
- function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 title claims description 336
- 238000000034 method Methods 0.000 title claims description 14
- 230000006870 function Effects 0.000 claims description 233
- 230000004044 response Effects 0.000 claims description 61
- 238000000926 separation method Methods 0.000 claims description 25
- 238000012545 processing Methods 0.000 claims description 9
- 238000011144 upstream manufacturing Methods 0.000 description 21
- 230000000052 comparative effect Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 8
- 238000012986 modification Methods 0.000 description 5
- 230000004048 modification Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000002955 isolation Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000009466 transformation Effects 0.000 description 3
- 238000013480 data collection Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F13/00—Interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
- G06F13/38—Information transfer, e.g. on bus
- G06F13/42—Bus transfer protocol, e.g. handshake; Synchronisation
- G06F13/4282—Bus transfer protocol, e.g. handshake; Synchronisation on a serial bus, e.g. I2C bus, SPI bus
- G06F13/4291—Bus transfer protocol, e.g. handshake; Synchronisation on a serial bus, e.g. I2C bus, SPI bus using a clocked protocol
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
- G05B19/0423—Input/output
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/04—Programme control other than numerical control, i.e. in sequence controllers or logic controllers
- G05B19/042—Programme control other than numerical control, i.e. in sequence controllers or logic controllers using digital processors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F13/00—Interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
- G06F13/38—Information transfer, e.g. on bus
- G06F13/40—Bus structure
- G06F13/4004—Coupling between buses
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F13/00—Interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
- G06F13/38—Information transfer, e.g. on bus
- G06F13/42—Bus transfer protocol, e.g. handshake; Synchronisation
- G06F13/4282—Bus transfer protocol, e.g. handshake; Synchronisation on a serial bus, e.g. I2C bus, SPI bus
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/20—Pc systems
- G05B2219/25—Pc structure of the system
- G05B2219/25257—Microcontroller
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2213/00—Indexing scheme relating to interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
- G06F2213/0064—Latency reduction in handling transfers
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Hardware Design (AREA)
- Information Transfer Systems (AREA)
- Programmable Controllers (AREA)
Description
最初に比較例に係るPLCについて説明し、その問題点について述べる。
図1に示すように、パラレルバス型では、一般的にベースモジュール上にCPUモジュール及び拡張モジュールが実装される。各モジュールは、ベースモジュール上に配線されたパラレルバスで接続される。CPUモジュールが通信マスタとなり、パラレルバスを介して拡張モジュールへリード/ライトアクセスを行う。パラレルバスは、双方向に通信可能なバスである。
図2に示すように、シリアルバス型では、一般的にベースモジュールが不要で、隣り合ったモジュール同士がシリアルバスで接続される。CPUモジュールが通信マスタとなって、拡張モジュールへコマンドを送信する。自局宛てのコマンドを受け取った拡張モジュールは、CPUモジュールへ応答を返送する。シリアルバスは、片方向のバスであり、コマンドと応答は決まった方向へ伝送される。各拡張モジュールは、他局宛てのコマンドと応答を受け取ると、それを次の拡張モジュールへ送信する。このようにして、コマンドと応答が伝送される。
通常、入出力応答の処理は、CPUモジュールが入力モジュールから入力値を読み出し、CPUモジュールで処理を行った後に出力モジュールへ出力値を書き込むことで実行される。一方、特定の高速アプリケーションにおいて、例えば汎用の拡張モジュールを使用する等の従来の方法では、応答時間の要求を満たせない場合がある。その場合、図3に示すように、専用外部インターフェースと専用演算回路を備えた特殊拡張モジュールを使用し、CPUモジュールを介さずに特殊拡張モジュール内で入出力応答の処理を行うことで、応答時間の高速化が図られる。
・パラレルバス型
パラレルバスはマルチドロップ型の回路トポロジである。このため、アクセス中はバス全体が占有されてしまい、1つのアクセスが終了するまでは次のアクセスを開始することができない。また、パラレルバスに接続されるモジュール数が増えると、信号波形が乱れやすくなるので、転送速度を上げることが困難である。
シリアルバスは、point-to-point型の回路トポロジである。このため、シリアルバスに接続されるモジュール数に関係なく安定した信号波形が得られるので、転送速度を上げやすい。また、パラレルバスと比較すると、転送される信号数も少ない。これらの理由により、近年ではシリアルバスが採用される傾向がある。また、シリアルバスは、パラレルバスのようにアクセス中にバス全体が占有されることがない。このため、シリアルバス上で一度に複数のコマンドと応答を送受信することで、パラレルバスよりもバスの使用効率を上げることができる。
特殊拡張モジュール内での入出力応答の処理に使用できるI/Oは、当該特殊拡張モジュール自体に備えられた専用外部インターフェースに接続されるI/Oだけである。このため、I/Oの点数を増やしたい場合には、専用の特殊拡張モジュールを新規に開発する必要があり、外部機器とのI/Oの拡張性に乏しい。
本開示の目的は、上述の問題点に鑑み、バスを介して通信可能に接続された複数のモジュールを備えるシステムにおいて、外部機器とのI/Oの拡張性を向上することである。以下、本開示の一実施形態に係るシステムについて添付図面を参照して説明する。
まず、拡張モジュール間通信モードについて説明する。拡張モジュール間通信モードでは、シリアルバス1を用いて通常通信が行われ、2つに分離されたシリアルバス2の一方を用いて通常通信が行われ、他方を用いて拡張モジュール間通信が行われる。通常通信では、CPUモジュール10がマスタとなり、他のモジュールがスレーブとなる。拡張モジュール間通信では、特定の拡張モジュールがマスタとなり、他の拡張モジュールがスレーブとなる。
CPUモジュール10のマスタ通信回路12は、マスタ通信機能[0]13及びマスタ通信機能[1]14を有効にし、他の機能(マスタ通信機能[0,1]15)を無効にする。図6においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール50のマスタ/スレーブ通信回路53は、スレーブ通信機能[0]54及びマスタ通信機能[1]57を有効にし、他の機能(スレーブ通信機能[1]55及びスレーブ通信機能[0,1]56)を無効にする。また、その他の拡張モジュール20、30、40、及び60のマスタ/スレーブ通信回路23、33、43、及び63は、スレーブ通信機能[0]24、34、44、及び64、並びにスレーブ通信機能[1]25、35、45、及び65をそれぞれ有効にし、他の機能(スレーブ通信機能[0,1]26、36、46、及び66、並びにマスタ通信機能[1]27、37、47、及び67)を無効にする。図6においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール40の分離回路48は、動作状態をONに設定し、シリアルバス2を拡張モジュール30と40との間で論理的に分離する。また、その他の拡張モジュール20、30、50、及び60の分離回路28、38、58、及び68は、動作状態をOFFに設定し、それぞれシリアルバス2に接続する。図6においては説明の簡便のため、動作状態がOFFである分離回路28、38、58、及び68の図示を省略した。
次に、高速通信モードについて説明する。高速通信モードでは、シリアルバス1及び2を束ねたチャネルを介して高速通信が行われる。詳細には、シリアルバス1及び2を束ねたチャネルのダウンストリームとして、シリアルバス1のダウンストリーム1a及びシリアルバス2のダウンストリーム2aが用いられる。シリアルバス1及び2を束ねたチャネルのアップストリームとして、シリアルバス1のアップストリーム1b及びシリアルバス2のアップストリーム2bが用いられる。したがって、高速通信では、上述した通常通信と比較して、ダウンストリーム及びアップストリームそれぞれのビット幅が2倍になる。高速通信では、CPUモジュール10がマスタとなり、他のモジュールがスレーブとなる。
CPUモジュール10のマスタ通信回路12は、マスタ通信機能[0,1]15を有効にし、他の機能(マスタ通信機能[0]13及びマスタ通信機能[1]14)を無効にする。図10においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール20~60のマスタ/スレーブ通信回路23~63は、スレーブ通信機能[0,1]26~66をそれぞれ有効にし、他の機能(スレーブ通信機能[0]24~64、スレーブ通信機能[1]25~65、及びマスタ通信機能[1]27~67)をそれぞれ無効にする。図10においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール20~60の分離回路28~68は、動作状態をOFFに設定し、それぞれシリアルバス2に接続する。図10においては説明の簡便のため、動作状態がOFFである分離回路28~68の図示を省略した。
図6の例では、拡張モジュール間通信においてマスタとして機能する拡張モジュール50は、スレーブとして機能する拡張モジュール40及び60に対して直接読み書きすることができる。これにより、拡張モジュール50は、CPUモジュール10なしに、演算回路52を使用して高速でインテリジェントな入出力応答処理ができるようになる。また、コンフィグレーションに応じて任意の拡張モジュールの外部インターフェースを使用できるので、例えば図3に示す特殊拡張モジュールを採用する構成と比較してI/O点数の不足を補うことができる。
図10に示す例では、シリアルバス1及び2を1つの高速通信用のチャネルに束ねることによって、通常通信の2倍の速度で通信を行うことができる。したがって、高速通信モードは、例えば高速なデータ収集のアプリケーションなど、データ量が比較的多い場合、又は要求される転送時間が比較的短い場合に有効である。
図6及び図10に示す例のように本実施形態によれば、CPUモジュール10のマスタ通信回路12、並びに拡張モジュール20~60のマスタ/スレーブ通信回路23~63及び分離回路28~68のコンフィグレーションを行うだけで、シリアルバスの使用形態を変更できる。
例えば、シリアルバスのダウンストリーム及びアップストリームの信号は1ビットに限られず、2ビット以上であってもよい。また、シリアルバスの数は2つに限られず、3つ以上であってもよい。また、シリアルバス1及び2の役割が入れ替わってもよい。
拡張モジュールの数は、1つ以上あればよい。また、拡張モジュール間通信のマスタとなる拡張モジュールの数は、2つ以上であってもよい。また、分離回路28~68によって、シリアルバスが1カ所だけでなく、複数カ所で分離されてもよい。また、分離できるシリアルバスが2つ以上あってもよい。
拡張モジュールの数は、1つ以上あればよい。また束ねられるシリアルバスの数は2つ以上であってもよい。
システムAに備えられる一部の拡張モジュールが外部インターフェースを備えなくてもよい。また、一部の拡張モジュールが演算回路を備えなくてもよい。また、一部の拡張モジュールが分離回路を備えなくてもよい。また、一部の拡張モジュールがマスタ通信機能[1]を有さなくてもよい。
図6の変形例として、拡張モジュール間通信を行わない場合のコンフィグレーションと動作例を図13に示す。
CPUモジュール10のマスタ通信回路12は、マスタ通信機能[0]13及びマスタ通信機能[1]14を有効にし、他の機能(マスタ通信機能[0,1]15)を無効にする。図13においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール20~60のマスタ/スレーブ通信回路23~63は、スレーブ通信機能[0]24~64、及びスレーブ通信機能[1]25~65をそれぞれ有効にし、他の機能(スレーブ通信機能[0,1]26~66、及びマスタ通信機能[1]27~67)を無効にする。図13においては説明の簡便のため、無効とされた機能の図示を省略した。
拡張モジュール20~60の分離回路28~68は、動作状態をOFFに設定し、それぞれシリアルバス2に接続する。図13においては説明の簡便のため、動作状態がOFFである分離回路28~68の図示を省略した。
上記のコンフィグレーションにより、全ての通信が通常通信のみとなる。この場合、CPUモジュール10が通信のマスタとなり、全ての拡張モジュール20~60がスレーブとなる。CPUモジュール10が宛先の拡張モジュールへコマンドを送信し、コマンドを受信した拡張モジュールがCPUモジュール10へ応答を返送する。シリアルバス1を用いた通常通信用のチャネルと、シリアルバス2を用いた通常通信用のチャネルとは、互いに独立して使用可能である。
図13に示す例において、CPUモジュール10のマスタ通信回路12が、マスタ通信機能[0]13によって、シリアルバス1のダウンストリーム1aを介してコマンド70を拡張モジュール40へ送信する。拡張モジュール40のマスタ/スレーブ通信回路43が、スレーブ通信機能[0]44によって、シリアルバス1のアップストリーム1bを介して応答71を返送する。
図13に示す例において、CPUモジュール10のマスタ通信回路12が、マスタ通信機能[1]14によって、シリアルバス2のダウンストリーム2aを介してコマンド78を拡張モジュール60へ送信する。拡張モジュール60のマスタ/スレーブ通信回路63が、スレーブ通信機能[1]65によって、シリアルバス2のアップストリーム2bを介して応答79を返送する。
変形例では、シリアルバス1を用いた通常通信用のチャネルと、シリアルバス2を用いた通常通信用のチャネルとは、互いに独立して使用可能である。かかる構成は、例えば外部機器を制御しながら同時にデータ収集を行いたい場合等に有効である。例えば、シリアルバス1を制御用に割り当て、シリアルバス2をデータ収集用に割り当てることで、制御周期に影響を与えることなく、外部機器の制御とデータ収集を同時に実施可能である。
1、2 シリアルバス
1a、2a ダウンストリーム
1b、2b アップストリーム
10 CPUモジュール
11 演算回路
12 マスタ通信回路
13 マスタ通信機能[0]
14 マスタ通信機能[1]
15 マスタ通信機能[0,1]
20~60 拡張モジュール
21~61 外部インターフェース
22~62 演算回路
23~63 マスタ/スレーブ通信回路
24~64 スレーブ通信機能[0]
25~65 スレーブ通信機能[1]
26~66 スレーブ通信機能[0,1]
27~67 マスタ通信機能[1]
28~68 分離回路
Claims (11)
- 複数のシリアルバスに接続される拡張モジュールであって、
外部信号の入出力を行うインターフェースと、
第1のシリアルバス及び第2のシリアルバスを介して通信する通信回路と、
を備え、
前記通信回路は、前記第1のシリアルバスを介して通信する第1のスレーブ通信機能と、前記第2のシリアルバスを介して通信する第2のスレーブ通信機能と、前記第1のシリアルバス及び前記第2のシリアルバスを束ねて通信する第3のスレーブ通信機能と、前記第2のシリアルバスを介して通信するマスタ通信機能とを、それぞれ有効/無効の切り替えが可能な態様で有し、
前記第1のスレーブ通信機能及び前記第3のスレーブ通信機能のそれぞれは、CPUモジュールから受信した自局宛てのコマンドに対して応答を返送し、前記CPUモジュールから受信した他局宛てのコマンドを中継し、他局から受信した応答を中継する機能を含み、
前記第2のスレーブ通信機能は、前記CPUモジュール又は他局から受信した自局宛てのコマンドに対して応答を返送し、前記CPUモジュール又は他局から受信した他局宛てのコマンドを中継し、他局から受信した応答を中継する機能を含み、
前記マスタ通信機能は、他局に対してコマンドを送信し、前記他局からの応答を受信する機能を含む、拡張モジュール。 - 請求項1に記載の拡張モジュールであって、
前記第2のシリアルバスを分離する分離回路を更に備える、拡張モジュール。 - 請求項1又は2に記載の拡張モジュールであって、
前記通信回路は、前記第2のスレーブ通信機能、前記第3のスレーブ通信機能、及び前記マスタ通信機能のうち、何れか1つの機能を有効にすると他の2つの機能を無効にする、拡張モジュール。 - 請求項1から3の何れか一項に記載の拡張モジュールであって、
プログラムを実行する演算回路を更に備え、
前記マスタ通信機能が有効であるときに、前記演算回路は、コマンドの送信先である他局から前記第2のシリアルバスを介して受信した応答に対して演算処理を実行して出力値を決定する、拡張モジュール。 - 請求項4に記載の拡張モジュールであって、
前記マスタ通信機能が有効であるときに、前記通信回路は、前記第2のシリアルバスを介して前記出力値を他局へ送信する、拡張モジュール。 - 複数のシリアルバスに接続されるCPUモジュールであって、
第1のシリアルバス及び第2のシリアルバスを介して通信する通信回路を備え、
前記通信回路は、前記第1のシリアルバスを介して通信する第1のマスタ通信機能と、前記第2のシリアルバスを介して通信する第2のマスタ通信機能と、前記第1のシリアルバス及び前記第2のシリアルバスを束ねて通信する第3のマスタ通信機能とを、それぞれ有効/無効の切り替えが可能な態様で有し、
前記第1のマスタ通信機能、前記第2のマスタ通信機能、及び前記第3のマスタ通信機能のそれぞれは、他局に対してコマンドを送信し、前記他局からの応答を受信する機能を含む、CPUモジュール。 - 第1のシリアルバスと、第2のシリアルバスと、CPUモジュールと、複数の拡張モジュールと、を備えるシステムであって、
前記CPUモジュール及び前記複数の拡張モジュールのそれぞれは、前記第1のシリアルバス及び前記第2のシリアルバスに接続されており、
前記複数の拡張モジュールのそれぞれは、前記第1のシリアルバスを介して通信する第1のスレーブ通信機能と、前記第2のシリアルバスを介して通信する第2のスレーブ通信機能と、前記第1のシリアルバス及び前記第2のシリアルバスを束ねて通信する第3のスレーブ通信機能と、前記第2のシリアルバスを介して通信するマスタ通信機能とを、それぞれ有効/無効の切り替えが可能な態様で有し、
前記第1のスレーブ通信機能、前記第2のスレーブ通信機能、及び前記第3のスレーブ通信機能のそれぞれは、前記CPUモジュールから受信した他局宛てのコマンドを中継する機能を含み、
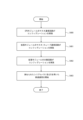
前記マスタ通信機能は、他局に対してコマンドを送信する機能を含む、システム。 - 請求項7に記載のシステムの通信方法であって、
1つの前記拡張モジュールが、前記第2のシリアルバスを2つに分離するステップと、
前記CPUモジュールが、前記第1のシリアルバスを介して前記複数の拡張モジュールと通信するステップと、
前記CPUモジュールが、分離された一方の前記第2のシリアルバスを介して、前記一方の第2のシリアルバスに接続された拡張モジュールと通信するステップと、
分離された他方の前記第2のシリアルバスに接続された2つ以上の拡張モジュールが、前記他方の前記第2のシリアルバスを介して互いに通信するステップと、
を含む、通信方法。 - 請求項7に記載のシステムの通信方法であって、
前記CPUモジュール及び前記複数の拡張モジュールが、前記第1のシリアルバス及び前記第2のシリアルバスを束ねるステップと、
前記CPUモジュール及び前記複数の拡張モジュールが、束ねられた前記第1のシリアルバス及び前記第2のシリアルバスを介して通信するステップと、
を含む、通信方法。 - 請求項7に記載のシステムであって、
前記第1のスレーブ通信機能及び前記第3のスレーブ通信機能のそれぞれは、CPUモジュールから受信した自局宛てのコマンドに対して応答を返送し、前記CPUモジュールから受信した他局宛てのコマンドを中継し、他局から受信した応答を中継する機能を含み、
前記第2のスレーブ通信機能は、前記CPUモジュール又は他局から受信した自局宛てのコマンドに対して応答を返送し、前記CPUモジュール又は他局から受信した他局宛てのコマンドを中継し、他局から受信した応答を中継する機能を含み、
前記マスタ通信機能は、他局に対してコマンドを送信し、前記他局からの応答を受信する機能を含む、システム。 - 第1のシリアルバスと、第2のシリアルバスと、CPUモジュールと、複数の拡張モジュールと、を備え、前記CPUモジュール及び前記複数の拡張モジュールのそれぞれは、前記第1のシリアルバス及び前記第2のシリアルバスに接続されているシステムの通信方法であって、
1つの前記拡張モジュールが、前記第2のシリアルバスを2つに分離するステップと、
前記CPUモジュールが、前記第1のシリアルバスを介して前記複数の拡張モジュールと通信するステップと、
前記CPUモジュールが、分離された一方の前記第2のシリアルバスを介して、前記一方の第2のシリアルバスに接続された拡張モジュールと通信するステップと、
分離された他方の前記第2のシリアルバスに接続された2つ以上の拡張モジュールが、前記他方の前記第2のシリアルバスを介して互いに通信するステップと、
を含む、通信方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020113186A JP7415824B2 (ja) | 2020-06-30 | 2020-06-30 | 拡張モジュール、cpuモジュール、システム、及び通信方法 |
| KR1020210082714A KR102682510B1 (ko) | 2020-06-30 | 2021-06-24 | 확장 모듈, cpu 모듈, 시스템, 및 통신 방법 |
| CN202110709373.6A CN113867187A (zh) | 2020-06-30 | 2021-06-25 | 扩展模块、cpu模块、系统以及通信方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020113186A JP7415824B2 (ja) | 2020-06-30 | 2020-06-30 | 拡張モジュール、cpuモジュール、システム、及び通信方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022011810A JP2022011810A (ja) | 2022-01-17 |
| JP7415824B2 true JP7415824B2 (ja) | 2024-01-17 |
Family
ID=78989963
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020113186A Active JP7415824B2 (ja) | 2020-06-30 | 2020-06-30 | 拡張モジュール、cpuモジュール、システム、及び通信方法 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7415824B2 (ja) |
| KR (1) | KR102682510B1 (ja) |
| CN (1) | CN113867187A (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2023238221A1 (ja) * | 2022-06-07 | 2023-12-14 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004280303A (ja) | 2003-03-13 | 2004-10-07 | Omron Corp | プログラマブルコントローラ及びユニット |
| JP2013191132A (ja) | 2012-03-15 | 2013-09-26 | Omron Corp | 制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003202907A (ja) | 2002-01-08 | 2003-07-18 | Yaskawa Electric Corp | Plcモジュールとオプションモジュールとの同期方法 |
| JP4922877B2 (ja) * | 2007-09-12 | 2012-04-25 | 光洋電子工業株式会社 | 信号シリアル伝送システム |
| US9015393B2 (en) * | 2012-03-13 | 2015-04-21 | Nokia Corporation | Master-slave interface |
| KR101857088B1 (ko) * | 2015-08-11 | 2018-05-11 | 주식회사 오픈비지니스솔루션코리아 | 리턴 회로를 갖는 리모트 입출력 장치 및 그의 내부 버스 통신 방법 |
| US20170083468A1 (en) * | 2015-09-21 | 2017-03-23 | Qualcomm Incorporated | Identifying multiple identical devices on a shared bus |
| JP6803262B2 (ja) * | 2017-02-27 | 2020-12-23 | 川崎重工業株式会社 | 制御装置 |
| KR102014691B1 (ko) * | 2017-07-13 | 2019-08-27 | 주식회사 크래비스 | 이중화된 전원 및 커플러 모듈을 가진 산업용제어기의 원격 입출력 장치 |
| CN208061195U (zh) * | 2017-12-12 | 2018-11-06 | 深圳市正浩创新科技有限公司 | 系统总线编址装置 |
| KR20190091931A (ko) * | 2018-01-30 | 2019-08-07 | 엘에스산전 주식회사 | Plc 백플레인의 핫 스왑 장치 |
| KR20200031931A (ko) * | 2018-09-17 | 2020-03-25 | 주식회사 엘지화학 | Bms 인식 시스템 및 방법 |
| KR102146323B1 (ko) * | 2019-03-12 | 2020-08-20 | 엘에스일렉트릭(주) | Plc 시스템의 인터페이스 변환 장치 및 그 plc 시스템 |
| CN109993958B (zh) * | 2019-05-08 | 2021-06-11 | 深圳市共济科技股份有限公司 | 一种rs485总线的数据采集系统及方法 |
-
2020
- 2020-06-30 JP JP2020113186A patent/JP7415824B2/ja active Active
-
2021
- 2021-06-24 KR KR1020210082714A patent/KR102682510B1/ko active Active
- 2021-06-25 CN CN202110709373.6A patent/CN113867187A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004280303A (ja) | 2003-03-13 | 2004-10-07 | Omron Corp | プログラマブルコントローラ及びユニット |
| JP2013191132A (ja) | 2012-03-15 | 2013-09-26 | Omron Corp | 制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20220002117A (ko) | 2022-01-06 |
| JP2022011810A (ja) | 2022-01-17 |
| CN113867187A (zh) | 2021-12-31 |
| KR102682510B1 (ko) | 2024-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8462776B2 (en) | Communication module having a communication interface element and communication interface element | |
| EP2116938B1 (en) | Operation apparatus and control method | |
| US8171199B2 (en) | Multiprocessor gateway | |
| US9678917B2 (en) | Communications assembly having logic multichannel communication via a physical transmission path for serial interchip data transmission | |
| JP7415824B2 (ja) | 拡張モジュール、cpuモジュール、システム、及び通信方法 | |
| CN115840592A (zh) | Flash访问方法、控制器、系统及可读存储介质 | |
| KR100981461B1 (ko) | 통신 칩 및 메시지 관리자에 의한 통신 칩의 메시지 메모리의 데이터에 대한 액세스 제어 방법 | |
| KR20070037634A (ko) | 플렉스레이 통신 구성 요소 | |
| KR102549085B1 (ko) | 버스 제어회로 | |
| CN110169017B (zh) | 控制装置以及通信装置 | |
| JP2008041022A (ja) | I/o装置、通信装置、サーボモータ制御装置、制御システムおよびロボットシステム | |
| JP4617782B2 (ja) | データ専用バスを有する無線機 | |
| CN110178344B (zh) | 控制装置以及通信装置 | |
| JP2006109258A (ja) | 通信方法及び通信装置 | |
| KR20070039937A (ko) | 메시지 메모리 내에서 메시지를 저장하기 위한 방법 및상응하는 메시지 메모리 | |
| JP2008140065A (ja) | アクセス調停装置、アクセス調停方法、及び情報処理装置 | |
| KR20070085444A (ko) | 인터페이스 모듈을 구비한 통신 모듈 어셈블리와 그에관련한 인터페이스 모듈 | |
| JP2006099431A (ja) | 制御装置 | |
| Taube et al. | Comparison of CAN gateway modules for automotive and industrial control applications | |
| JP4594047B2 (ja) | デバイス | |
| CN101069165B (zh) | 计算机系统 | |
| JP3602004B2 (ja) | 装置内クロック非同期におけるシステム制御装置 | |
| JP6364951B2 (ja) | Dmaコントローラ | |
| JP2012038260A (ja) | バス転送システム | |
| JP4609540B2 (ja) | マルチプロセサシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221031 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230823 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230829 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231019 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231218 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7415824 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |