JP5141778B2 - 車両状態推定装置 - Google Patents
車両状態推定装置 Download PDFInfo
- Publication number
- JP5141778B2 JP5141778B2 JP2010546474A JP2010546474A JP5141778B2 JP 5141778 B2 JP5141778 B2 JP 5141778B2 JP 2010546474 A JP2010546474 A JP 2010546474A JP 2010546474 A JP2010546474 A JP 2010546474A JP 5141778 B2 JP5141778 B2 JP 5141778B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- axle load
- center
- cornering power
- front wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/12—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to parameters of the vehicle itself, e.g. tyre models
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/12—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to parameters of the vehicle itself, e.g. tyre models
- B60W40/13—Load or weight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/12—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to parameters of the vehicle itself, e.g. tyre models
- B60W40/13—Load or weight
- B60W2040/1315—Location of the centre of gravity
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/10—Weight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/007—Automatic balancing machines with single main ground engaging wheel or coaxial wheels supporting a rider
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/08—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles
- G01G19/086—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for incorporation in vehicles wherein the vehicle mass is dynamically estimated
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
KH=Ψ(M,L,Lf,Lr,Kf,Kr) …(1)
の形式で表される。かかるKHの関数Ψの変数のうち、前輪タイヤのコーナリングパワーKf及び後輪タイヤのコーナリングパワーKrは、それぞれ、前輪車軸荷重Mf、後輪車軸荷重Mrの関数として、即ち、
Kf=κf(Mf) …(2a);
Kr=κr(Mr) …(2b)
の形式にて表されることが知られている。また、前輪車軸荷重Mf及び後輪車軸荷重Mrは、鉛直方向の力のモーメントの釣り合いから、
Mf=M・Lr/L …(3a)
Mr=M・Lf/L …(3b)
により与えられる。そして、L、Lf及びLrについては、
L=Lf+Lr …(4)
の関係が成り立つ。そうすると、式(2a)、(2b)、(3a)、(3b)、(4)の関係を用いて、式(1)から変数Kf、Kr及びLr(又はLf)を消去することができ、式(1)の関数は、
KH=Ψ(M,L,Lf) …(5)
[又はKH=Ψ(M,L,Lr)]
の形式に改めることが可能となる。従って、式(5)に於いて、Lf(又はLr)について解けば、Lf(又はLr)は、スタビリティファクタKH、車両重量M、ホイールベースLの関数として、即ち、
Lf=λ(KH,M,L) …(6)
[又はLr=λ(KH,M,L)]
の形式にて表される。そして、かかる式(6)からLf(又はLr)を算出することにより、車両の前後方向に於ける重心の位置が分かることとなる。つまり、車両の前後方向に於ける重心の位置は、スタビリティファクタKHと、車両重量Mと、式(2a)、(2b)の関数κf、κrの具体的な表式、即ち、前輪車軸荷重と前輪コーナリングパワーとの関係及び後輪車軸荷重と後輪コーナリングパワーとの関係とから推定することが可能となる。
Kf=κf(Mf)=af・Mf2+bf・Mf+cf …(2c);
Kr=κr(Mr)=ar・Mr2+br・Mr+cr …(2d)
と表すことができる。ここで、af、bf、cf、ar、br、crは、それぞれ定数係数である。従って、上記の本発明の装置に於いて、前輪車軸荷重と前輪コーナリングパワーとの関係が、前輪コーナリングパワーを前輪車軸荷重の二次関数として近似して得られた関係であり、後輪車軸荷重と後輪コーナリングパワーとの関係が、後輪コーナリングパワーを後輪車軸荷重の二次関数として近似して得られた関係であるよう構成されていてよい。かかる構成の場合、前輪及び後輪のタイヤについての車軸荷重とコーナリングパワーとの関係を定める定数係数は、予め求めておくことができるので、本発明の装置に於いては、前輪及び後輪のそれぞれの車軸荷重と前輪コーナリングパワーとの関係として、式(2c)、(2d)中の定数係数af、bf、cf、ar、br、crを記憶しておくだけでよくなり、従って、本発明の装置の記憶容量が低減でき、また、精度よく車両の前後方向に於ける重心位置を推定することが可能となる。なお、近似式は、二次関数に限らず、多項式近似、対数近似などの他の手法で得られたものであってもよい。
Kf=κf(Mf)=af・Mf+bf …(2e)
Kr=κr(Mr)=ar・Mr+br …(2f)
を用いて決定された式(6)の関数λを用いて、車両の前後方向に於ける重心の位置を推定するようになっていてよい。この場合、式(5)に於けるLf又はLrの次数が低くなり、式(6)の構成がより単純となり、Lf又はLrの算出の際の演算負荷が低減される点で有利である。
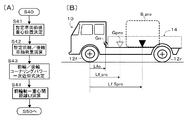
12f…前輪
12r…後輪
14…荷台
S…積載物
図1(A)は、自動車等の車両の前後方向の重心位置、前輪及び後輪の車軸荷重、コーナリングパワーを推定する本発明による車両状態推定装置の好ましい実施形態が搭載される車両10を示している。車両10は、公知の任意の形式の車両であってよく、一対の前輪12f及び一対の後輪12rと、任意の積載物Sが載置される荷台14とを有している。なお、図示の例では、簡単のため、車両後方部に上部が開放された荷台を有するトラックとして描かれているが、本発明の車両状態推定装置の搭載される車両は、箱型荷台を後方に有するトラック、前方にも荷台を有する車両、バス、その他の任意の積載物が積載可能な車両であってよい。

L=Lf+Lr …(4)
が成立する。また、前輪及び後輪のコーナリングパワーKf、Krは、後に詳細に説明される如く、それぞれ前輪及び後輪の車軸荷重Mf、Mrの関数として表すことが可能であり(車軸荷重とコーナリングパワーの関係)、車軸荷重Mf、Mrは、鉛直方向の力のモーメントの釣り合いから、下記の式
Mf=M・Lr/L …(3a)
Mr=M・Lf/L …(3b)
により、前輪軸/後輪軸−重心間距離Lf、Lrに関連付けられる。結局、式(7)に於ける前輪及び後輪のコーナリングパワーKf、Krは、前輪軸/後輪軸−重心間距離Lf又はLrの関数として表されることになるので、式(7)をLf又はLrについて解けば、Lf又はLrが、車両重量M、スタビリティファクタKHの関数として表すことが可能である(上記式(6)参照)。かくして、本発明の装置では、任意の公知の手法で取得又は演算して得られる車両重量M、スタビリティファクタKHを用いて、Lf(又はLr)を算出し、しかる後にLr(又はLf)、前輪及び後輪の車軸荷重Mf、Mr、前輪及び後輪のコーナリングパワーKf、Krが算出される。
図1(B)は、本発明の一つの実施形態による車両状態推定装置及び周辺機器の構成をブロック図の形式で表したものである。なお、本実施形態の装置は、自動車等の車両に搭載された電子制御装置又はコンピュータ(双方向コモン・バスにより相互に連結されたCPU、ROM、RAM及び入出力ポート装置を有する通常の形式のものであってよい。)の、プログラムに従った作動により実現されてよい。同図を参照して、本発明の装置は、車両前後方向重心位置推定部50と、前後輪それぞれのコーナリングパワーと車軸荷重の関係を表すデータを記憶したデータメモリ50aと、車両重量推定部50bと、スタビリティファクタ推定部50cとを含む。図示の如く、車両重量推定部50bは、典型的には、車両の走行中の制駆動力値(又はこれを推定するためのスロットル開度、ブレーキ圧など)と前後加速度センサ等で検出された加減速度値との入力に基づき、公知の任意の手法(例えば、特許文献1に記載の方法であってよい。)により、現在の(積載物の重量を含む)車両の重量Mを推定する。スタビリティファクタ推定部50cは、ヨーレート値、車速値、舵角値、横加速度値等を用いて公知の任意の手法(例えば、特許文献2に記載の方法であってよい。)により、現在のスタビリティファクタ値KHを推定する。データメモリ50aには、後で説明される実施形態に於けるコーナリングパワーと車軸荷重との関係を表す関数の形式に依存して、関数の係数或いは予め実験的に(又は理論的に)得られたコーナリングパワー値と車軸荷重値の組のデータ群とが格納される。車両前後方向重心位置推定部50は、後に説明される態様にて、車両重量M、スタビリティファクタ値KH及びコーナリングパワーと車軸荷重との関係を表す関数の係数又はデータ群を適宜読み込み、前輪軸/後輪軸−重心間距離Lf、Lr、車軸荷重Mf、Mr、コーナリングパワーKf、Krを逐次算出し、それらの算出結果値が任意の運動制御装置等60に於いて利用できるようにする。なお、後に詳細に説明される実施形態の一つに於いて用いる目的で操舵応答時定数係数Tpを推定して、その値を車両前後方向重心位置推定部50へ出力する操舵応答時定数係数推定部50dが設けられていてよい。
既に触れたように、車両重量M、スタビリティファクタ値KHは、公知の任意の形式にて推定された値が用いられてよい。簡単には、例えば、車両重量Mは、直線走行中に車両を加減速したときの車両の発生駆動力(F)と加速度(α)との関係(又は発生制動力と減速度との関係)に走行抵抗Rを考慮して下記の式を用いて与えられる。
M=(F−R)/α …(8)
勿論、式(8)に限らず、種々の形式の車両重量の推定方法が用いられてよく、そのような場合も本発明の範囲に属する。また、スタビリティファクタ値KHは、簡単には、車両の定常旋回中のヨーレートγ、舵角δ、車速Vから
KH={(V・δ/L・γ)−1}/V2 …(9)
により算出可能である。なお、特許文献2の如く、ヨーレートの舵角に対する一次遅れを考慮して推定されるようになっていてもよく、そのような場合も本発明の範囲に属する。
既に触れた如く、本発明の装置では、車両重量M、スタビリティファクタKHを用いて車両前後方向重心位置が推定される。しかしながら、変数パラメータとして用いられる車両重量M、スタビリティファクタKHの精度が低い場合又は後述のそれらの仮値が使用されている場合には、推定された車両前後方向重心位置が過剰に真の位置から外れてしまうことも起き得る。そこで、積載物の重量が決定された段階で、荷台の構成と積載物の重量とから想定可能な車両前後方向重心位置の範囲、即ち、閾値が算出される。
Ms=M−Mo …(10)
により算出される。ここで、無積載時の車両の重量Moは、車両本体のみの重量、運転者の重量を含めた車両の重量或いは実際の乗員人数分の重量を含めた車両の重量である。(実際の乗員人数分の重量を考慮する場合、着座センサ又はシートベルトスイッチにより、実際の乗員人数が検出され、その人数に平均的な体重値が乗ぜられて得られる重量値が車両本体のみの重量に加算されてよい。)
Lf_min=(Mo・Lfo+Ms・Lf_Smin)/M …(11)
Lf_max=(Mo・Lfo+Ms・Lf_Smax)/M …(12)
ここで、Lf_Sminは、前輪軸−位置Smin間の前後方向距離であり、Lf_Smaxは、前輪軸−位置Smax間の前後方向距離であり、Lfoは、積載物を除いた車両の重心Goと前輪軸との間の前後方向距離である。かくして、下記のステップ40にて算出される前輪軸−重心間距離Lfは、
Lf_min≦Lf≦Lf_max …(13)
の条件を満たすことが期待され、もし範囲[Lf_min,Lf_max]を逸脱する場合には、Lfは、Lf_min又はLf_maxに設定されることとなる。なお、式(11)、(12)中、可変のパラメータは、Msだけである。従って、随時、式(11)、(12)を演算するのではなく、積載重量Msを変数としたLf_min,Lf_maxのマップがそれぞれ準備され、ステップ30に於いて、参照されるようになっていてもよい。
「発明の開示」の欄に於いて述べた如く、本発明の装置では、式(7)のスタビリティファクタKHを与える式(式(1)の具体例)に於いて、式(2a)、(2b)、(3a)、(3b)、(4)の関係を用いて、式(7)から変数Kf、Kr及びLr(又はLf)を消去した式をLf(又はLr)ついて解いて得られる式(6)の形式の関数を用いて、前輪軸−重心間距離Lfが算出される。この点に関し、式(6)の構成は、式(2a)、(2b)の形式によって種々の態様が考えられる。以下、車両重量MとスタビリティファクタKHとを変数として、前輪軸−重心間距離Lfを算出する幾つかの例について説明する。
図4のグラフは、実験的に得られた車軸荷重に対するコーナリングパワーのデータ値をプロットしたものを表している。同図に於いて、白丸は、シングルタイヤの前輪の場合の値を示し、黒丸は、ダブルタイヤの後輪の場合の値を示している。図から理解される如く、車軸荷重に対するコーナリングパワーの値は、車軸荷重の増大に対して単調増加した後、飽和するよう変化する。かかるコーナリングパワー値は、同図の一点鎖線κf(II)、κr(II)により示されている如き車軸荷重Mf、Mrの二次関数式:
κf(II)=af・Mf2+bf・Mf+cf …(14a);
κr(II)=ar・Mr2+br・Mr+cr …(14b)
により近似的により良く表すことができる。そして、車軸荷重Mf、Mrは、式(3a)、(3b)、(4)を用いて、Lfの関数の形式で表される。そこで、本実施例では、式(2a)、(2b)として、式(14a)、(14b)を用いて式(7)をLfの関数の形式に変換した式から得られた式:
Lf=λ(KH,M,L,af,bf,cf,ar,br,cr) …(6a)
を用いてLfが算出される。式(14a)、(14b)に於ける定数係数af、bf、cf、ar、br、crは、予め実験的に得られた車軸荷重に対するコーナリングパワーのデータ値から、最小自乗法その他の任意の二次近似の手法を用いて決定されてよい。また、本例の構成に於いて、予め算出された式(14a)、(14b)に於ける定数係数af、bf、cf、ar、br、crがデータメモリに格納され、ステップ40の実行時に読み出されるようになっていてよい。なお、式(6a)の具体的な表式の記載は省略されるが、当業者に於いて算出可能であることは理解されるべきである。
上記の例1に於いては、車軸荷重とコーナリングパワーの関係を表す式として、車軸荷重の二次関数が用いられたが、式(6a)の関数λの構成が複雑となり、演算負荷が増大する。そこで、本実施例では、式(2a)、(2b)として、図4中の実線κf(I)、κr(I)により示されている如く、コーナリングパワー値を車軸荷重の一次関数として表した式:
κf(I)=af・Mf+bf …(15a);
κr(I)=ar・Mr+br …(15b)
が用いられて得られた式(6)により、Lfが算出される。Lfの具体的な表式は、
Lf=(L/2)・(KH・L・af・M・ar-KH・L・af・br+KH・L・bf・ar+af・M+bf-ar・M+br+(2br・bf+KH2・L2・af2・br2-2KH・L・af・br2+KH2・L2・bf2・ar2+2KH・L・bf2・ar-2bf・ar・M+2ar・M・br+af2・M2+bf2+ar2・M2+br2+KH2・L2・af2・M2・ar2+2KH2・L2・af2・M・ar・br+2KH2・L2・af・M・ar2・bf+2KH・L・af2・M2・ar-2KH・L・af・M2・ar2+2KH2・L2・af・br・bf・ar+2KH・L・af2・br・M-2KH・L・bf・ar2・M+4KH・L・af・M・ar・bf-4KH・L・af・M・ar・br+2KH・L・af・br・bf-2KH・L・bf・ar・br-2af・M・br-2af・M2・ar+2af・M・bf)1/2)/((KH・L・af・ar+af-ar)M) …(16)
となる。式(15a)、(15b)に於ける定数係数af、bf、ar、brの具体的な値は、予め実験的に得られた車軸荷重に対するコーナリングパワーのデータ値から最小自乗法その他の任意の一次近似の手法を用いて決定されてよい。
車両の重心位置は実際の積載重量に依存して大きく変動する。従って、積載重量を考慮せずに、上記の例2の如く車軸荷重とコーナリングパワーの関係を一次近似式により表すと、実際の積載重量に依存して、算出された前輪軸−重心間距離Lfの精度が低下する可能性がある。実際、図4中のκf(II)とκf(I)、或いは、κr(II)とκr(I)の間の差分の大きさが大きくなっている部分が存在する(κf(I)、κr(I)は、想定される車軸荷重の全域に亙って車軸荷重値に対するコーナリングパワーのデータ値を一次近似することにより得られた。)。そこで、本実施例では、車軸荷重とコーナリングパワーの関係を一次近似式で表す際に利用する予め実験的に得られた車軸荷重に対するコーナリングパワーのデータ値の範囲を、実際の積載重量に於いて想定される範囲に制限することにより、車軸荷重とコーナリングパワーの関係の一次近似式の精度を向上し、これにより、算出されるLfの精度の向上が図られる。
Lf_pro=(Mo・Lfo+Ms・Lf_Spro)/M …(17a)
Lr_pro=L−Lf_pro …(17b)
これにより、暫定の前輪軸荷重Mf_pro、暫定の後輪軸荷重Mr_proが下記の式により与えられる(ステップ42)。
Mf_pro=M・Lr_pro/L …(18a)
Mr_pro=M・Lf_pro/L …(18b)
例3の如く決定された暫定的な車両前後方向重心位置G_proをコーナリングパワーと車軸荷重との関係を表す一次関数の決定に用いる場合、演算結果の精度を向上するためには、暫定的な車両前後方向重心位置G_proが真の重心位置にできるだけ近接していることが好ましい。本実施例では、そのようにできるだけ暫定的な車両前後方向重心位置G_proを真の重心位置に近接したものとするために、暫定的な車両前後方向重心位置G_proが車両の操舵応答特性を参照して決定される。特許文献2に記載されている如く、操舵応答特性の指標の一つである操舵応答時定数係数Tpは、車両のヨー慣性モーメントIの関数:
Tp=I/L2(1/Kf+1/Kr) …(19)
により与えられることが知られている。車両のヨー慣性モーメントIは、積載重量が重くなるほど増大するとともに、積載位置が車両の重心から離れるほど増大する。即ち、操舵応答時定数係数Tpは、積載重量が重くなるほど及び積載位置が車両の重心から離れるほど増大する。かくして、かかる操舵応答時定数係数と積載物の重量及び配置との関係を用いて、より精度よく、暫定的な車両前後方向重心位置G_proを決定することが試みられる。
例3又は例4の如く、暫定前輪軸−重心間距離Lf_proの決定及びこれを用いた車軸荷重とコーナリングパワーの関係を表す一次関数式の決定を経て式(16)から推定算出された前輪軸−重心間距離Lfは、暫定前輪軸−重心間距離Lf_proよりも真の前輪軸−重心間距離Lfに近い値となっていることが期待される。従って、更に、一旦算出された前輪軸−重心間距離Lfを暫定前輪軸−重心間距離Lf_proに設定した状態にて、車軸荷重とコーナリングパワーの関係を表す一次関数式を決定すれば、更に、精度よく前輪軸−重心間距離Lfが推定されることが期待される。そこで、本実施例では、一旦推定された前輪軸−重心間距離Lfを暫定前輪軸−重心間距離Lf_proに設定して、かかる新たに設定された暫定前輪軸−重心間距離Lf_proを用いた車軸荷重とコーナリングパワーの関係を表す一次関数式の決定及び式(16)による前輪軸−重心間距離Lfの算出を、暫定前輪軸−重心間距離Lf_proと式(16)により得られた前輪軸−重心間距離Lfとの差分が十分に小さくなるまで反復することにより、前輪軸−重心間距離Lfの推定値の精度の向上が図られる。
|Lf−Lf_pro|<L(閾値) …(20)
が成立しているか否かが判定される(ステップ45)。ここで、もし条件(20)が成立していないと判定されたときには、算出されたLfをLf_proに設定し(ステップ46)、ステップ42、43及び44が繰り返される。そして、かかる処理が反復して実行された結果、条件(20)が成立したとき、そのときの算出された前輪軸−重心間距離Lfが最終的な前輪軸−重心間距離Lfとして決定される。
(1)収束演算を所定回数以上(例えば、3回以上)実行したとき。
(2)Lfの値が単調増加又は単調減少しないとき[最新のLfとその一つ前のLfとの差分の符号が逆転したとき。]。
(3)Lfの値が[Lf_min,Lf_max]の範囲から逸脱したとき。
既に理解される如く、前輪軸−重心間距離Lfは、車両重量M、スタビリティファクタKHを変数として与えられる。そこで、図9に示される如き車両重量M、スタビリティファクタKHを変数パラメータとして前輪軸−重心間距離Lfを与えるマップを予め調製し、車両の走行中には、車両重量MとスタビリティファクタKHとの値からマップを参照して、前輪軸−重心間距離Lfを決定するようになっていてよい。この場合、上記の例1〜5の場合に比して、演算処理の負荷が大幅に低減される点で有利である。
Lf<Lf_minのとき、Lf←Lf_min …(21a)
Lf_max<Lfのとき、Lf←Lf_max …(21b)
と設定される。
Lr=L−Lf …(22)
により、後輪軸−重心間距離が算出される。
かくして、前輪軸−重心間距離Lfと後輪軸−重心間距離Lrが算出されると、式(3a)、(3b)を用いて、前輪車軸荷重Mf、後輪車軸荷重Mrがそれぞれ算出され(ステップ50)、式(14a)、(14b)[例1、6の場合]又は式(15a)、(15b)[例2〜5の場合]を用いて、前輪コーナリングパワーKf、後輪コーナリングパワーKrが算出される。
ところで、ステップ10又は20の実行時に車両重量M又はスタビリティファクタ値KHが推定されていないとき、例えば、車両の走行の開始後、車両重量Mが推定可能な直線加減速走行が実施されていないとき、或いは、スタビリティファクタ値KHが推定可能な旋回走行が実施されていないときには、車両重量M又はスタビリティファクタ値KHとして、仮値が用いられるようになっていてよい。例えば、車両重量Mが推定されていないときの車両重量Mの仮値は、規定された車両総重量、即ち、車両本体の重量と定員の重量と最大許容積載重量の規定値との和が用いられてよい(規定車両総重量を仮値とするのは、車両の運転者にとって、積載量が多いほど車両の操縦がしにくくなるためである。)。
Lf=(Mo・Lfo+(M−Mo)・Lfsc)/M …(22a)
Lr=L−Lf …(22b)
により算出されてよい。ここで、Moは、車両本体の重量(無積載時の重量)であり、Lfoは、車両本体の重心から前輪軸までの前後方向距離であり、Lfscは、荷台の中心から前後方向距離である(車両重量Mは、同値が推定されていないときは、前記の如く規定車両総重量であってよい。)。また、前後輪のコーナリングパワーKf、Krは、式(3a)、(3b)の関係式に式(22a)、(22b)の結果を代入して得られた車軸荷重値Mf、Mrを、上記の前後輪の各々のコーナリングパワーと車軸荷重Mf、Mrの予め得られている関係式(14a)、(14b)に代入することにより算出されてよい。
Claims (11)
- 車両の状態を推定する装置であって、車両重量値と、スタビリティファクタ値と、前輪車軸荷重と前輪コーナリングパワーとの関係と、後輪車軸荷重と後輪コーナリングパワーとの関係とに基づいて車両の前後方向に於ける重心位置を推定することを特徴とする装置。
- 請求項1の装置であって、前記推定された車両の前後方向に於ける重心位置に基づいて前輪車軸荷重値、後輪車軸荷重値、前輪コーナリングパワー値及び後輪コーナリングパワー値のうちの少なくとも一つを推定することを特徴とする装置。
- 請求項1又は2の装置であって、前記前輪車軸荷重と前輪コーナリングパワーとの関係が、前記前輪コーナリングパワーを前記前輪車軸荷重の一次関数として近似して得られた関係であり、前記後輪車軸荷重と後輪コーナリングパワーとの関係が、前記後輪コーナリングパワーを前記後輪車軸荷重の一次関数として近似して得られた関係であることを特徴とする装置。
- 請求項3の装置であって、前記車両重量に基づいて暫定の車両の前後方向に於ける重心位置が決定され、前記暫定の重心位置から暫定前輪車軸荷重値と暫定後輪車軸荷重値とが決定され、前記前輪車軸荷重と前輪コーナリングパワーとの関係として、前記暫定前輪車軸荷重値を略中心とした所定の前輪車軸荷重の範囲に於いて前記前輪コーナリングパワーを前記前輪車軸荷重の一次関数として近似して得られた関係が用いられ、前記後輪車軸荷重と後輪コーナリングパワーとの関係として、前記暫定後輪車軸荷重値を略中心とした所定の後輪車軸荷重の範囲に於いて前記後輪コーナリングパワーを前記後輪車軸荷重の一次関数として近似して得られた関係が用いられて、前記車両の前後方向に於ける重心位置が推定されることを特徴とする装置。
- 請求項4の装置であって、前記推定された車両の前後方向に於ける重心位置が新たな暫定の車両の前後方向に於ける重心位置に設定され、前記新たな暫定の重心位置から新たな暫定前輪車軸荷重値と新たな暫定後輪車軸荷重値とが決定され、前記前輪車軸荷重と前輪コーナリングパワーとの関係として、前記新たな暫定前輪車軸荷重値を略中心とした所定の前輪車軸荷重の範囲に於いて前記前輪コーナリングパワーを前記前輪車軸荷重の一次関数として近似して得られた関係が用いられ、前記後輪車軸荷重と後輪コーナリングパワーとの関係として、前記新たな暫定後輪車軸荷重値を略中心とした所定の後輪車軸荷重の範囲に於いて前記後輪コーナリングパワーを前記後輪車軸荷重の一次関数として近似して得られた関係が用いられて、前記車両の前後方向に於ける重心位置が推定されることを特徴とする装置。
- 請求項5の装置であって、前記暫定の車両の前後方向に於ける重心位置又は前記新たな暫定の車両の前後方向に於ける重心位置と前記推定された車両の前後方向に於ける重心位置との差の大きさが所定の大きさより小さくなるまで前記車両の前後方向に於ける重心位置の推定演算が反復して実行されることを特徴とする装置。
- 請求項4乃至6のいずれかの装置であって、最初の暫定の車両の前後方向に於ける重心位置が前記車両重量と前記車両の積載物の想定される配置とに基づいて決定されることを特徴とする装置。
- 請求項4乃至6のいずれかの装置であって、最初の暫定の車両の前後方向に於ける重心位置が前記車両重量と前記車両の操舵応答特性に基づいて決定されることを特徴とする装置。
- 請求項1又は2の装置であって、前記前輪車軸荷重と前輪コーナリングパワーとの関係が、前記前輪コーナリングパワーを前記前輪車軸荷重の二次関数として近似して得られた関係であり、前記後輪車軸荷重と後輪コーナリングパワーとの関係が、前記後輪コーナリングパワーを前記後輪車軸荷重の二次関数として近似して得られた関係であることを特徴とする装置。
- 請求項1又は2の装置であって、前記前輪車軸荷重と前輪コーナリングパワーとの関係が予め求められた前記前輪車軸荷重に対する前記前輪コーナリングパワーの値の群から決定され、前記後輪車軸荷重と後輪コーナリングパワーとの関係が予め求められた前記後輪車軸荷重に対する前記後輪コーナリングパワーの値の群から決定されることを特徴とする装置。
- 請求項1又は2の装置であって、前輪車軸荷重と前輪コーナリングパワーとの関係と、後輪車軸荷重と後輪コーナリングパワーとの関係とに基づいて得られる車両重量値及びスタビリティファクタ値を変数とする関数を用いて車両の前後方向に於ける重心位置を推定することを特徴とする装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/050271 WO2010082288A1 (ja) | 2009-01-13 | 2009-01-13 | 車両状態推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010082288A1 JPWO2010082288A1 (ja) | 2012-06-28 |
| JP5141778B2 true JP5141778B2 (ja) | 2013-02-13 |
Family
ID=42339557
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010546474A Expired - Fee Related JP5141778B2 (ja) | 2009-01-13 | 2009-01-13 | 車両状態推定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9096232B2 (ja) |
| EP (1) | EP2380795B1 (ja) |
| JP (1) | JP5141778B2 (ja) |
| CN (1) | CN102282052B (ja) |
| WO (1) | WO2010082288A1 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8744686B2 (en) * | 2009-09-24 | 2014-06-03 | Toyota Jidosha Kabushiki Kaisha | Device for estimating turning characteristic of vehicle |
| JP5636825B2 (ja) * | 2010-08-31 | 2014-12-10 | 株式会社アドヴィックス | 車重推定装置 |
| DE102010063436A1 (de) * | 2010-12-17 | 2012-06-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Bestimmen einer Reichweite eines Fahrzeugs |
| JP5592832B2 (ja) * | 2011-05-17 | 2014-09-17 | 日立建機株式会社 | 電気駆動ダンプトラック |
| JP5710386B2 (ja) * | 2011-06-02 | 2015-04-30 | 日立建機株式会社 | 電気駆動ダンプトラック |
| EP2799822B1 (en) * | 2011-12-27 | 2021-05-26 | Toyota Jidosha Kabushiki Kaisha | Method and device for estimating loading state of vehicle |
| JP5533903B2 (ja) * | 2012-01-27 | 2014-06-25 | トヨタ自動車株式会社 | 車両制御装置 |
| EP2818378B1 (en) * | 2012-02-24 | 2020-07-29 | Toyota Jidosha Kabushiki Kaisha | Turning characteristic estimating device for vehicle |
| GB201205000D0 (en) * | 2012-03-22 | 2012-05-09 | Schrader Electronics Ltd | System and method for momitoring vehicle load dynamics |
| US9358846B2 (en) | 2012-10-19 | 2016-06-07 | The Goodyear Tire & Rubber Company | Vehicle weight and center of gravity estimation system and method |
| CN105008202A (zh) * | 2013-03-04 | 2015-10-28 | 丰田自动车株式会社 | 车辆的基准运动状态量的运算方法 |
| JP5914448B2 (ja) * | 2013-11-01 | 2016-05-11 | ヤマハ発動機株式会社 | 鞍乗り型車両および車輪力取得装置 |
| FR3014557B1 (fr) * | 2013-12-05 | 2017-02-10 | Renault Sa | Procede d'estimation de la masse d'un vehicule |
| US9290185B2 (en) * | 2014-04-22 | 2016-03-22 | Michael Hall | Determining haul weight |
| GB2535773B (en) * | 2015-02-27 | 2019-10-30 | Jaguar Land Rover Ltd | Vehicle mass estimation |
| US10011284B2 (en) * | 2016-07-13 | 2018-07-03 | Mitsubishi Electric Research Laboratories, Inc. | System and method for determining state of stiffness of tires of vehicle |
| CN107618402B (zh) * | 2017-09-20 | 2019-07-26 | 中国重汽集团济南动力有限公司 | 分布式驱动汽车车轴载荷计算方法及驱动力矩控制方法 |
| CN108556850B (zh) * | 2018-04-18 | 2019-08-23 | 吉林大学 | 一种多轴重型车辆车轮垂向载荷通用计算方法 |
| US11066081B2 (en) * | 2018-05-01 | 2021-07-20 | Ford Global Technologies, Llc | Methods and apparatus to modify vehicle function based on loading conditions |
| CN109190147B (zh) * | 2018-07-16 | 2023-05-16 | 深圳怡丰自动化科技有限公司 | 载车板的最大弯矩获取方法及装置、具有存储功能的装置 |
| JP6905566B2 (ja) * | 2019-10-30 | 2021-07-21 | 先進モビリティ株式会社 | 車両の重心位置推定システム |
| CN111186445B (zh) * | 2020-01-20 | 2021-11-30 | 北京主线科技有限公司 | 自动驾驶车辆横向控制方法及其系统 |
| JP6912635B1 (ja) * | 2020-07-29 | 2021-08-04 | 先進モビリティ株式会社 | 車両の重心位置推定方法 |
| CN112706778B (zh) * | 2021-01-15 | 2022-04-08 | 一汽解放汽车有限公司 | 一种车辆质心识别方法、车辆及存储介质 |
| KR102331807B1 (ko) * | 2021-04-16 | 2021-12-02 | 국방과학연구소 | 차량의 주행을 위한 전자 장치 및 그의 동작 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0699758A (ja) * | 1992-09-17 | 1994-04-12 | Fuji Heavy Ind Ltd | 4輪駆動車のトルク配分制御方法 |
| JPH10338496A (ja) * | 1997-06-11 | 1998-12-22 | Toyota Autom Loom Works Ltd | 産業車両の揺動制御装置及び前後重心位置推定装置 |
| JP2005184971A (ja) * | 2003-12-18 | 2005-07-07 | Nissan Motor Co Ltd | 電動車両のモータ出力制御装置 |
| JP2005239011A (ja) * | 2004-02-26 | 2005-09-08 | Mitsubishi Motors Corp | 車両用パワーステアリング装置及び車両用外乱推定装置 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2443098A (en) * | 1937-10-08 | 1948-06-08 | Rca Corp | Apparatus for determining the weight and center of gravity of vehicles |
| US3443077A (en) * | 1963-07-12 | 1969-05-06 | Jerome Lettvin | Method of and apparatus for center of gravity computation and the like |
| GB1530125A (en) * | 1974-11-27 | 1978-10-25 | Cl Instr Ltd | Axle load monitoring systems |
| US5416706A (en) * | 1984-04-27 | 1995-05-16 | Hagenbuch; Leroy G. | Apparatus for identifying containers from which refuse is collected and compiling a historical record of the containers |
| US4848508A (en) * | 1987-10-05 | 1989-07-18 | Borg-Warner Automotive, Inc. | Method and apparatus for controlling wheel slip in a full-time four wheel drive vehicle |
| DE4134240C2 (de) * | 1991-10-16 | 1995-12-14 | Mannesmann Ag | Lenkungsunterstützung bei einem nicht-spurgebundenen Fahrzeug |
| US5774821A (en) * | 1994-11-25 | 1998-06-30 | Itt Automotive Europe Gmbh | System for driving stability control |
| US5671143A (en) * | 1994-11-25 | 1997-09-23 | Itt Automotive Europe Gmbh | Driving stability controller with coefficient of friction dependent limitation of the reference yaw rate |
| DE69618337T2 (de) * | 1996-02-27 | 2003-02-13 | Knorr-Bremse Systeme Fuer Nutzfahrzeuge Gmbh | Verfahren zur Fahrstabilitätserhöhung |
| JP3629916B2 (ja) | 1997-09-18 | 2005-03-16 | 三菱ふそうトラック・バス株式会社 | 前2軸車両のスタビリティファクタ導出方法及び目標ヨーレイト設定方法 |
| DE10014220A1 (de) * | 2000-03-22 | 2001-09-27 | Bosch Gmbh Robert | Verfahren zur Bestimmung der Querbeschleunigung eines Kraftfahrzeugs |
| GB0106925D0 (en) * | 2001-03-20 | 2001-05-09 | Lucas Industries Ltd | Steering control during ABS split MU operation |
| JP3448573B2 (ja) | 2001-05-09 | 2003-09-22 | 株式会社豊田中央研究所 | 車両質量算出装置 |
| JP3829934B2 (ja) | 2002-06-27 | 2006-10-04 | トヨタ自動車株式会社 | 車輌の旋回特性推定装置 |
| DE10243516A1 (de) * | 2002-09-19 | 2004-04-01 | Robert Bosch Gmbh | Vorrichtung zur Bestimmung einer Gesamtmasse eines Fahrzeugs |
| DE10333654B4 (de) * | 2003-07-24 | 2005-09-29 | Bayerische Motoren Werke Ag | Steuervorrichtung für ein zumindest zeitweise vierradgetriebenes Kraftfahrzeug |
| KR20060120061A (ko) * | 2003-10-28 | 2006-11-24 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량의 조종성을 향상시키기 위한 방법 및 시스템 |
| DE10358335B3 (de) * | 2003-12-12 | 2005-05-25 | Siemens Ag | Bestimmung von dynamischen Achslasten und/oder Radlasten eines Radfahrzeuges |
| JP2005199882A (ja) | 2004-01-16 | 2005-07-28 | Nsk Ltd | 車両用走行状態安定化装置 |
| DE102004046008B4 (de) * | 2004-09-16 | 2012-01-26 | Getrag Driveline Systems Gmbh | Antriebsstrang und Verfahren zum Ansteuern eines Antriebsstranges |
| DE102005004523A1 (de) * | 2005-01-31 | 2006-08-10 | Zf Friedrichshafen Ag | Verfahren zum Bestimmen einer Steuervorgabe einer von einer Steuervorrichtung ansteuerbaren aktiven Lenkeinrichtung eines Fahrzeugs |
| US7388475B2 (en) * | 2006-01-19 | 2008-06-17 | Gm Global Technology Operations, Inc. | Lane departure warning and avoidance system with warning modification criteria |
| JP2008024235A (ja) * | 2006-07-24 | 2008-02-07 | Equos Research Co Ltd | 車両 |
| DE102006049541B4 (de) * | 2006-10-20 | 2018-10-31 | Volkswagen Ag | Verfahren und Vorrichtung zur Ermittlung einer Anhängerstützlast |
-
2009
- 2009-01-13 CN CN200980154475.3A patent/CN102282052B/zh not_active Expired - Fee Related
- 2009-01-13 WO PCT/JP2009/050271 patent/WO2010082288A1/ja active Application Filing
- 2009-01-13 JP JP2010546474A patent/JP5141778B2/ja not_active Expired - Fee Related
- 2009-01-13 US US13/131,408 patent/US9096232B2/en not_active Expired - Fee Related
- 2009-01-13 EP EP09838258.3A patent/EP2380795B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0699758A (ja) * | 1992-09-17 | 1994-04-12 | Fuji Heavy Ind Ltd | 4輪駆動車のトルク配分制御方法 |
| JPH10338496A (ja) * | 1997-06-11 | 1998-12-22 | Toyota Autom Loom Works Ltd | 産業車両の揺動制御装置及び前後重心位置推定装置 |
| JP2005184971A (ja) * | 2003-12-18 | 2005-07-07 | Nissan Motor Co Ltd | 電動車両のモータ出力制御装置 |
| JP2005239011A (ja) * | 2004-02-26 | 2005-09-08 | Mitsubishi Motors Corp | 車両用パワーステアリング装置及び車両用外乱推定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2380795A1 (en) | 2011-10-26 |
| JPWO2010082288A1 (ja) | 2012-06-28 |
| CN102282052B (zh) | 2014-11-26 |
| EP2380795A4 (en) | 2016-10-26 |
| US9096232B2 (en) | 2015-08-04 |
| CN102282052A (zh) | 2011-12-14 |
| WO2010082288A1 (ja) | 2010-07-22 |
| EP2380795B1 (en) | 2019-09-11 |
| US20110257876A1 (en) | 2011-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5141778B2 (ja) | 車両状態推定装置 | |
| JP5177286B2 (ja) | 車両の重量関連物理量推定装置及び制御装置 | |
| US6662097B2 (en) | System for computing a road surface frictional coefficient | |
| JP6056954B2 (ja) | 車両の走行運動制御装置 | |
| US8504273B2 (en) | Coefficient of friction based limitation of the torque of a vehicle control loop | |
| US20190217854A1 (en) | Vehicle stability control system and method | |
| US9823111B2 (en) | Method and device for estimating loading state of vehicle | |
| US20120316744A1 (en) | Vehicle control system | |
| US11648933B2 (en) | Method for controlling wheel slip of vehicle | |
| EP2692605B1 (en) | Vehicle driving force control device | |
| US12252130B2 (en) | Method for controlling traveling of vehicle | |
| JP5958643B2 (ja) | 車両の基準運動状態量の演算方法 | |
| CN114248774B (zh) | 车辆弯道控制方法、装置、计算机设备和存储介质 | |
| JP5211995B2 (ja) | 車両用減速制御装置及びその方法 | |
| GB2368918A (en) | A system for determining the centre-of-gravity height of a vehicle | |
| JP6577850B2 (ja) | 車両の制御装置及び車両の制御方法 | |
| CN115675400A (zh) | 用于控制车辆的制动和/或牵引的方法 | |
| US20070027605A1 (en) | Load transfer adaptive traction control system | |
| KR20220043983A (ko) | 차량의 선회 성능 향상 장치 및 방법 | |
| JP5089558B2 (ja) | 路面摩擦係数推定装置 | |
| JP5754265B2 (ja) | タイヤ接地長推定装置 | |
| CN117657115A (zh) | 车辆的稳定控制方法与装置、存储介质、车辆 | |
| WO2023210534A1 (ja) | 車両の制御装置 | |
| WO2023210533A1 (ja) | 車両の制御装置 | |
| JP2024518686A (ja) | 車両の車輪のスリップ限界値を決定するための方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121023 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121105 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151130 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5141778 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |