JP5004891B2 - 傾斜調整機構およびこの傾斜調整機構の制御方法 - Google Patents
傾斜調整機構およびこの傾斜調整機構の制御方法 Download PDFInfo
- Publication number
- JP5004891B2 JP5004891B2 JP2008192169A JP2008192169A JP5004891B2 JP 5004891 B2 JP5004891 B2 JP 5004891B2 JP 2008192169 A JP2008192169 A JP 2008192169A JP 2008192169 A JP2008192169 A JP 2008192169A JP 5004891 B2 JP5004891 B2 JP 5004891B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- head
- substrate
- tilt
- piezo
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 title claims description 160
- 238000000034 method Methods 0.000 title claims description 54
- 238000003860 storage Methods 0.000 claims description 25
- 238000001514 detection method Methods 0.000 claims description 15
- 239000000758 substrate Substances 0.000 description 379
- 239000010410 layer Substances 0.000 description 60
- 239000007788 liquid Substances 0.000 description 55
- 238000012546 transfer Methods 0.000 description 45
- 230000008602 contraction Effects 0.000 description 40
- 239000011521 glass Substances 0.000 description 39
- 230000002093 peripheral effect Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 18
- 239000011347 resin Substances 0.000 description 15
- 229920005989 resin Polymers 0.000 description 15
- 238000003825 pressing Methods 0.000 description 14
- 238000005304 joining Methods 0.000 description 13
- 230000001965 increasing effect Effects 0.000 description 12
- 239000002184 metal Substances 0.000 description 10
- 238000006073 displacement reaction Methods 0.000 description 8
- 239000000463 material Substances 0.000 description 6
- 229910004298 SiO 2 Inorganic materials 0.000 description 5
- 239000000835 fiber Substances 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 238000012545 processing Methods 0.000 description 5
- 238000007789 sealing Methods 0.000 description 5
- 239000004065 semiconductor Substances 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 230000001050 lubricating effect Effects 0.000 description 4
- 230000003068 static effect Effects 0.000 description 4
- 230000004913 activation Effects 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 238000005498 polishing Methods 0.000 description 3
- 239000011800 void material Substances 0.000 description 3
- 230000003028 elevating effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- LQBJWKCYZGMFEV-UHFFFAOYSA-N lead tin Chemical compound [Sn].[Pb] LQBJWKCYZGMFEV-UHFFFAOYSA-N 0.000 description 2
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 2
- 229910000679 solder Inorganic materials 0.000 description 2
- 239000004593 Epoxy Substances 0.000 description 1
- JOYRKODLDBILNP-UHFFFAOYSA-N Ethyl urethane Chemical compound CCOC(N)=O JOYRKODLDBILNP-UHFFFAOYSA-N 0.000 description 1
- 240000006829 Ficus sundaica Species 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- UHESRSKEBRADOO-UHFFFAOYSA-N ethyl carbamate;prop-2-enoic acid Chemical compound OC(=O)C=C.CCOC(N)=O UHESRSKEBRADOO-UHFFFAOYSA-N 0.000 description 1
- 239000005357 flat glass Substances 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000012044 organic layer Substances 0.000 description 1
- 230000003647 oxidation Effects 0.000 description 1
- 238000007254 oxidation reaction Methods 0.000 description 1
- 239000011148 porous material Substances 0.000 description 1
- KCTAWXVAICEBSD-UHFFFAOYSA-N prop-2-enoyloxy prop-2-eneperoxoate Chemical group C=CC(=O)OOOC(=O)C=C KCTAWXVAICEBSD-UHFFFAOYSA-N 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images


































Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L24/00—Arrangements for connecting or disconnecting semiconductor or solid-state bodies; Methods or apparatus related thereto
- H01L24/74—Apparatus for manufacturing arrangements for connecting or disconnecting semiconductor or solid-state bodies
- H01L24/75—Apparatus for connecting with bump connectors or layer connectors
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/10—Bump connectors; Manufacturing methods related thereto
- H01L2224/15—Structure, shape, material or disposition of the bump connectors after the connecting process
- H01L2224/16—Structure, shape, material or disposition of the bump connectors after the connecting process of an individual bump connector
- H01L2224/161—Disposition
- H01L2224/16151—Disposition the bump connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive
- H01L2224/16221—Disposition the bump connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked
- H01L2224/16225—Disposition the bump connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked the item being non-metallic, e.g. insulating substrate with or without metallisation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/01—Means for bonding being attached to, or being formed on, the surface to be connected, e.g. chip-to-package, die-attach, "first-level" interconnects; Manufacturing methods related thereto
- H01L2224/26—Layer connectors, e.g. plate connectors, solder or adhesive layers; Manufacturing methods related thereto
- H01L2224/31—Structure, shape, material or disposition of the layer connectors after the connecting process
- H01L2224/32—Structure, shape, material or disposition of the layer connectors after the connecting process of an individual layer connector
- H01L2224/321—Disposition
- H01L2224/32151—Disposition the layer connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive
- H01L2224/32221—Disposition the layer connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked
- H01L2224/32225—Disposition the layer connector connecting between a semiconductor or solid-state body and an item not being a semiconductor or solid-state body, e.g. chip-to-substrate, chip-to-passive the body and the item being stacked the item being non-metallic, e.g. insulating substrate with or without metallisation
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/73—Means for bonding being of different types provided for in two or more of groups H01L2224/10, H01L2224/18, H01L2224/26, H01L2224/34, H01L2224/42, H01L2224/50, H01L2224/63, H01L2224/71
- H01L2224/732—Location after the connecting process
- H01L2224/73201—Location after the connecting process on the same surface
- H01L2224/73203—Bump and layer connectors
- H01L2224/73204—Bump and layer connectors the bump connector being embedded into the layer connector
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2224/00—Indexing scheme for arrangements for connecting or disconnecting semiconductor or solid-state bodies and methods related thereto as covered by H01L24/00
- H01L2224/80—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected
- H01L2224/83—Methods for connecting semiconductor or other solid state bodies using means for bonding being attached to, or being formed on, the surface to be connected using a layer connector
- H01L2224/8319—Arrangement of the layer connectors prior to mounting
- H01L2224/83192—Arrangement of the layer connectors prior to mounting wherein the layer connectors are disposed only on another item or body to be connected to the semiconductor or solid-state body
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Control Of Position Or Direction (AREA)
- Wire Bonding (AREA)
Description
本発明の傾斜調整機構の第1実施形態である平面調整機構2を備えるナノインプリント装置1について図1を参照して説明する。図1はナノインプリント装置1の構成を示す図である。図1に示すナノインプリント装置1は、SiO2などにより構成される原板(本発明の「基準傾斜対象物」、「被加圧物」に相当)Mにリソグラフィ法により形成された凹凸パターンを、基板(本発明の「傾斜調整対象物」、「被加圧物」に相当)S上に塗布された紫外線硬化型樹脂液層からなる転写液層にインプリントするものであり、ステージ21の上面に基板Sが載置される平面調整機構(本発明の「傾斜調整機構」に相当)2と、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを同時に読取り可能な認識手段3と、認識手段3による原板Mおよび基板SのアライメントマークALの読取りに基づいて原板Mと基板Sとをアライメントするアライメント手段4と、モニタ8aを備え、平面調整機構2、認識手段3およびアライメント手段4の駆動制御を行うコントローラ(本発明の「ピエゾ駆動手段」に相当)8とを備えている。
定した状態で支持できるように、球面軸受23によるステージ21(半球体22)の支持方向が、加圧力の方向とほぼ反対の方向となるように自然にステージ21の傾きは変化する。すなわち、高加圧力によりガラス窓7などにたわみが生じることで、加圧力の方向と、ステージ21の基板載置面とがほぼ直交する方向となるようにステージ21の傾きが変化し、図6に示す例とは対照的に、ガラス窓7下部の保持機構側の平行度がステージ21に倣うこととなる。したがって、ステージ21および保持機構に保持された両基板Sの接触時のステージ21およびガラス窓7下部の保持機構側の傾きと(図6参照)、高加圧時のステージ21およびガラス窓7下部の保持機構側の傾きとが異なることとなり(図8参照)、このように接触時および高加圧時のステージ21等の傾きを異ならせることで、両基板Sを該両基板Sの接触面にほぼ直交する方向から均一に加圧することができる。
次に、図13および図14を参照して、インプリント方法の一例について説明する。図13はインプリント方法の一例を示す図である。また、図14は図13に示すインプリント方法を示す図であり、(a)ないし(d)はそれぞれ異なる状態を示す。図13に示すように、このインプリント方法の一例では、基板S上に紫外光により硬化する光硬化型樹脂が塗布されて形成された一層構造の転写液層UVRに、原板Mが有する凹凸パターンPをインプリントするように構成されている。この転写液層UVRは、ウレタン系、アクリル系、エポキシ系、ウレタンアクリレート系などの種々の光硬化型樹脂により形成することができる。
次に、図15および図16を参照して、インプリント方法の他の例について説明する。図15はインプリント方法の他の例を示す図である。また、図16は図15に示すインプリント方法を示す図であり、(a)ないし(d)はそれぞれ異なる状態を示す。図15に示すように、このインプリント方法の他の例が、上記したインプリント方法の一例と異なる点は、紫外光により硬化する光硬化型樹脂が塗布されて形成された基板S上の転写液層UVRが、ベース液層BRを下層とし、ベース液層BRよりも粘性の低い潤滑液層LRを上層とする2層構造である点である。そして、このように2層構造に構成された転写液層UVRに原板Mが有する凹凸パターンPがインプリントされるように構成されている。
本発明の傾斜調整機構の第1実施形態である平面調整機構102を備えるナノインプリント装置100について図17を参照して説明する。図17はナノインプリント装置100の構成を示す図である。このナノインプリント装置100が第1実施形態のナノインプリント装置1と異なる点は、X−Yテーブル41の代わりにピエゾ駆動手段215を有する駆動ユニット200を備え、この駆動ユニット200によりステージ121を移動して、原板Mと基板Sとの高精度アライメントを行っている点である。また、ナノインプリント装置1においてX−Yテーブル41が配設された箇所には、プリズムやミラーにより構成された導光路141aを有する土台141が配設されており、真空チャンバー5外に配設された光源34から、アライメント用の赤外光または転写液層硬化用の紫外光を原板Mおよび基板Sに照射可能に構成されている。その他の構成は上記第1実施形態と同様であるため、同一の構成には相当符号を付してその構成および動作の説明を省略する。以下、上記第1実施形態と異なる点を中心に説明する。
本発明の傾斜調整機構の第3実施形態である平面調整機構502を備える接合装置300について図28を参照して説明する。図28は接合装置300の構成を示す図である。この接合装置300は、ウエハーなどの基板322と電気部品などのチップ320とを接合(実装)したり、基板322どうしを接合するものである。接合装置300が上記した第1および第2実施形態のナノインプリント装置1,100と大きく異なる点は、ヘッド307が上下に移動するように構成されている点と、接合装置300を構成する平面調整機構502などが真空チャンバー5内に配設されていない点である。以下、接合装置300について詳細に説明する。なお、接合装置300が備える、ステージ521の上面に基板322が載置される平面調整機構(本発明の「傾斜調整機構」に相当)502は、上記した第1実施形態の平面調整機構2と構成および動作がほぼ同一であるため、相当符号を付して、その構成および動作の詳細な説明は省略する。なお、上記第1および第2実施形態と同様に、真空チャンバー5内に接合装置300を構成する平面調整機構502などを配置してもよい。そうすることで、プラズマや原子ビームなどのエネルギー波で被接合物の接合部表面をエッチングして表面活性化した後、接合までの間に真空雰囲気中で作業を行えるため、接合部表面の再酸化が防止され、エッチングされた有機物層などが接合部表面に再付着されないため、常温、低荷重で直接材料(被接合物)どうしを接合することも可能となる。
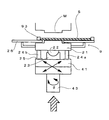
本発明の傾斜調整機構の第4実施形態である平面調整機構602について図29を参照して説明する。図29は平面調整機構602の要部拡大図であって平面調整機構602を示し、(a)は平面図、(b)は正面図である。本実施形態が上記した第3実施形態と大きく異なる点は、平面調整機構(本発明の「傾斜調整機構」に相当)602が上部の上下駆動機構325に設けられており、ヘッド保持部306が上下に移動するのに伴って平面調整機構602も上下に移動する点である。その他の構成および動作は上記した接合装置300の構成および動作と同様であるため、その構成および動作の説明を省略し、以下、平面調整機構602について図28も参照しつつ図29を参照して詳細に説明する。
そして、半球体622が球面軸受623を摺接することによるヘッド621の倣い動作が完了した後、さらに、3つの圧力センサ625の出力がほぼ同じ値となるように制御装置331により圧電素子624a,624b,624cの伸縮制御を行うことで、ヘッド621およびステージ607にそれぞれ設置された基板Sなどの平行度を高精度に調整できる。このように、ヘッド621およびステージ607にそれぞれ設置された基板Sなどの平行度を調整することで、図30に示すように、ヘッド621およびステージ607にそれぞれ保持された基板Sなどを、全面にわたって均一に加圧できる。なお、図30は基板Sの全面が均一に加圧されている状態(以下、「均一加圧状態」と称する)を示す図である。
121 ステージ
122 半球体(受部)
123 球面軸受(基部)
2 平面調整機構(傾斜調整機構)
21 ステージ
213 支持足(支持部)
215 ピエゾ駆動手段
217 受台(支持部)
23 球面軸受(球面状凹部、バックアップ手段)
24a,24b,24c 圧電素子(ピエゾ素子、ピエゾ駆動手段)
24a1,24b1,24c1 支持部
25 圧力センサ(荷重検出手段)
307 ヘッド
320 チップ(基準傾斜対象物、被加圧物)
322 基板(傾斜調整対象物、被加圧物)
325 上下駆動機構(移動手段、加圧手段)
331 制御装置(ピエゾ駆動手段、加圧手段、移動手段、ピエゾ素子制御パラメータ記憶手段)
43 Z軸(加圧手段、移動手段)
45 サーボ機構(加圧手段、移動手段)
5 真空チャンバー
502 平面調整機構(傾斜調整機構)
521 ステージ
523 球面軸受(球面状凹部、バックアップ手段)
524a 圧電素子(ピエゾ素子、ピエゾ駆動手段)
525 圧力センサ(荷重検出手段)
602 平面調整機構(傾斜調整機構)
621 ヘッド
623 球面軸受(球面状凹部、バックアップ手段)
624a,624b,624c 圧電素子(ピエゾ素子、ピエゾ駆動手段)
624a1,624b1,624c1 支持部
625 圧力センサ(荷重検出手段)
607 ステージ
8 コントローラ(ピエゾ駆動手段、加圧手段、移動手段、ピエゾ素子制御パラメータ記憶手段)
S 基板(傾斜調整対象物、被加圧物)
M 原板(基準傾斜対象物、被加圧物)
Claims (12)
- 上面に傾斜調整対象物が載置されるステージと、
前記ステージの下面と接離自在に面接触して前記ステージを支持するバックアップ手段と、
先端に支持部が設けられた複数のピエゾ素子を有し、前記各ピエゾ素子が伸縮しながら前記支持部により前記ステージを下方から支持して前記ステージの傾きを調整するピエゾ駆動手段とを備え、
前記ピエゾ駆動手段は、少なくとも前記ステージの傾斜調整時には、前記ステージの下面とバックアップ手段とが離間するように前記各ピエゾ素子を伸縮する
ことを特徴とする傾斜調整機構。 - 前記ステージの下面は凸球状に形成され、
前記バックアップ手段には、凸球状の前記ステージの下面に摺接可能な球面状凹部が設けられている
ことを特徴とする請求項1に記載の傾斜調整機構。 - 前記ステージの下面は平面状に形成され、
前記バックアップ手段には、
球面状凹部が形成された基部と、
前記球面状凹部に摺接可能な球面状凸部が形成され、前記球面状凸部が前記球面状凹部に摺接した状態で前記ステージの下面に面接触する受部と
が設けられていることを特徴とする請求項1に記載の傾斜調整機構。 - 真空チャンバーをさらに備え、
前記真空チャンバー内に、前記ステージと、前記バックアップ手段と、前記ピエゾ駆動手段とが配設されていることを特徴とする請求項1ないし3のいずれかに記載の傾斜調整機構。 - 前記ステージに対向配置されて、前記ステージの傾きを調整することによる前記傾斜調整対象物の傾斜調整における基準傾斜となる基準傾斜対象物を下面に保持するヘッドと、
前記ステージの上面と、前記ヘッドの下面とを互いに近接するように移動する移動手段とをさらに備え、
前記移動手段は、
前記ピエゾ駆動手段が、前記傾斜調整対象物の傾斜を前記基準傾斜対象物の傾斜とぼほ一致させて、前記傾斜調整対象物と前記基準傾斜対象物とをほぼ平行に調整した後に、
前記ステージおよび前記ヘッドを近接移動して、前記傾斜調整対象物と前記基準傾斜対象物とを接触させることを特徴とする請求項1ないし4のいずれかに記載の傾斜調整機構。 - 前記ステージの上面に載置される前記傾斜調整対象物としての被加圧物を加圧する加圧手段をさらに備え、
前記各ピエゾ素子は前記バックアップ手段を囲んで配設されて、前記各支持部は前記バックアップ手段による前記ステージ下面の支持位置を囲んで前記ステージを下方から支持し、
前記ピエゾ駆動手段は、前記加圧手段による前記被加圧物の加圧時前に、
前記ステージの下面と前記バックアップ手段とが離間するように前記各ピエゾ素子を伸縮し、
前記加圧手段は、前記ピエゾ駆動手段が前記各ピエゾ素子を前記ステージの下面と前記バックアップ手段とが離間するように伸縮した後に、前記被加圧物を加圧する
ことを特徴とする請求項1ないし5のいずれかに記載の傾斜調整機構。 - 前記ステージの上面に載置される前記傾斜調整対象物としての被加圧物を加圧する加圧手段をさらに備え、
前記各ピエゾ素子は前記バックアップ手段を囲んで配設されて、前記各支持部は前記バックアップ手段による前記ステージ下面の支持位置を囲んで前記ステージを下方から支持し、
前記ピエゾ駆動手段は、前記加圧手段による前記被加圧物の加圧前時に、
前記支持部による前記ステージの下方からの支持状態を解除するように前記各ピエゾ素子を伸縮し、
前記加圧手段は、前記ピエゾ駆動手段が前記各ピエゾ素子を前記ステージの下方からの支持状態を解除するように伸縮した後に、前記被加圧物を加圧する
ことを特徴とする請求項1ないし5のいずれかに記載の傾斜調整機構。 - 前記ステージの上面に載置される前記傾斜調整対象物としての被加圧物を加圧する加圧手段と、
前記各ピエゾ素子への荷重を検出する荷重検出手段と、
前記各ピエゾ素子を前記ピエゾ駆動手段が伸縮したときの制御パラメータを予め記憶するピエゾ素子制御パラメータ記憶手段とをさらに備え、
前記ピエゾ駆動手段は、前記加圧手段による前記被加圧物の加圧時に、
前記荷重検出手段による前記各ピエゾ素子への荷重の検出値が予め設定した設定ほぼ同じ値となるように、前記ピエゾ素子制御パラメータ記憶手段に予め記憶された前記制御パラメータに基づいて前記各ピエゾ素子を伸縮する
ことを特徴とする請求項1ないし5のいずれかに記載の傾斜調整機構。 - 前記ステージに対向配置されて、前記被加圧物を下面に保持するヘッドと、
前記ステージの上面と、前記ヘッドの下面とを互いに近接するように移動する移動手段と、
前記ステージの上面に載置される前記傾斜調整対象物としての被加圧物と、前記ヘッドに保持される前記被加圧物とを加圧する加圧手段と、
前記各ピエゾ素子への荷重を検出する荷重検出手段と、
前記加圧手段による前記被加圧物の加圧時に、前記荷重検出手段による前記各ピエゾ素子への荷重の検出値が予め設定した設定値となるように、前記各ピエゾ素子を前記ピエゾ駆動手段が伸縮したときの制御パラメータと、前記移動手段による前記ステージが保持する前記被加圧物と前記ヘッドが保持する被加圧物との接触時に、前記荷重検出手段による前記各ピエゾ素子への荷重の検出値が予め設定した設定値となるように、前記各ピエゾ素子を前記ピエゾ駆動手段が伸縮したときの制御パラメータとを予め記憶するピエゾ素子制御パラメータ記憶手段とさらに備え、
前記ピエゾ駆動手段は、前記移動手段による前記被加圧物どうしの接触時と、前記加圧手段による前記被加圧物の加圧時に、
前記ピエゾ素子制御パラメータ記憶手段にそれぞれ予め記憶された前記接触時と前記加圧時の各制御パラメータに基づいて、前記各ピエゾ素子を伸縮する
ことを特徴とする請求項1ないし4のいずれかに記載の傾斜調整機構。 - 下面に傾斜調整対象物が設置されるヘッドと、
前記ヘッドの上面と接離自在に面接触して前記ヘッドを支持するバックアップ手段と、
先端に支持部が設けられた複数のピエゾ素子を有し、前記各ピエゾ素子が伸縮しながら前記支持部により前記ヘッドを上方から支持して前記ヘッドの傾きを調整するピエゾ駆動手段とを備え、
前記ピエゾ駆動手段は、少なくとも前記ヘッドの傾斜調整時には、前記ヘッドの上面とバックアップ手段とが離間するように前記各ピエゾ素子を伸縮する
ことを特徴とする傾斜調整機構。 - 前記ヘッドに対向配置されて、前記ヘッドの傾きを調整することによる前記傾斜調整対象物の傾斜調整における基準傾斜となる基準傾斜対象物を上面に保持するステージと、
前記ヘッドの下面と、前記ステージの上面とを互いに近接するように移動する移動手段とをさらに備え、
前記移動手段は、
前記ピエゾ駆動手段が、前記傾斜調整対象物の傾斜を前記基準傾斜対象物の傾斜とぼほ一致させて、前記傾斜調整対象物と前記基準傾斜対象物とをほぼ平行に調整した後に、
前記ヘッドおよび前記ステージを近接移動して、前記傾斜調整対象物と前記基準傾斜対象物とを接触させることを特徴とする請求項10に記載の傾斜調整機構。 - 上面に傾斜調整対象物が載置されるステージと、
前記ステージの下面と接離自在に面接触して前記ステージを支持するバックアップ手段とを備える傾斜調整機構の制御方法において、
先端に支持部が設けられた複数のピエゾ素子が伸縮しながら前記支持部により前記ステージを下方から支持して前記ステージの傾きを調整し、
少なくとも前記ステージの傾斜調整時には、前記ステージの下面とバックアップ手段とが離間するように前記各ピエゾ素子を伸縮する
ことを特徴とする傾斜調整機構の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192169A JP5004891B2 (ja) | 2008-07-25 | 2008-07-25 | 傾斜調整機構およびこの傾斜調整機構の制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008192169A JP5004891B2 (ja) | 2008-07-25 | 2008-07-25 | 傾斜調整機構およびこの傾斜調整機構の制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010034132A JP2010034132A (ja) | 2010-02-12 |
| JP5004891B2 true JP5004891B2 (ja) | 2012-08-22 |
Family
ID=41738296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008192169A Active JP5004891B2 (ja) | 2008-07-25 | 2008-07-25 | 傾斜調整機構およびこの傾斜調整機構の制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5004891B2 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010080863A (ja) * | 2008-09-29 | 2010-04-08 | Nikon Corp | 転写装置及びデバイス製造方法 |
| JP5454239B2 (ja) * | 2010-03-09 | 2014-03-26 | 株式会社ニコン | 基板貼り合せ装置、基板貼り合せ方法、積層半導体装置製造方法及び積層半導体装置 |
| JP5454252B2 (ja) * | 2010-03-15 | 2014-03-26 | 株式会社ニコン | 基板貼り合せ装置、基板貼り合せ方法、積層半導体装置製造方法及び積層半導体装置 |
| NL2006536A (en) * | 2010-05-13 | 2011-11-15 | Asml Netherlands Bv | A substrate table, a lithographic apparatus, a method of flattening an edge of a substrate and a device manufacturing method. |
| US8893377B2 (en) | 2010-05-19 | 2014-11-25 | Panasonic Corporation | Apparatus and method for mounting semiconductor light-emitting element |
| JP5443408B2 (ja) * | 2011-02-23 | 2014-03-19 | 株式会社東芝 | 半導体装置の製造方法 |
| JP5637931B2 (ja) | 2011-05-17 | 2014-12-10 | キヤノン株式会社 | インプリント装置、インプリント方法およびデバイス製造方法 |
| JP5798017B2 (ja) * | 2011-11-30 | 2015-10-21 | 株式会社Screenホールディングス | 転写装置、アライメント方法および転写方法 |
| KR101414830B1 (ko) | 2011-11-30 | 2014-07-03 | 다이닛뽕스크린 세이조오 가부시키가이샤 | 얼라이먼트 방법, 전사 방법 및 전사장치 |
| KR101379379B1 (ko) | 2012-11-09 | 2014-03-28 | 나노전광 주식회사 | 노광 시스템용 웨이퍼 척 수평 유지 장치 |
| JP2015065383A (ja) * | 2013-09-26 | 2015-04-09 | パナソニックIpマネジメント株式会社 | 部品実装装置 |
| WO2015107715A1 (ja) * | 2014-01-14 | 2015-07-23 | シャープ株式会社 | 実装基板の製造装置、及び実装基板の製造方法 |
| JP2016018957A (ja) * | 2014-07-10 | 2016-02-01 | 富士通株式会社 | 半導体装置の実装方法、及び、半導体装置の実装装置 |
| JP6275632B2 (ja) * | 2014-12-24 | 2018-02-07 | 三菱重工工作機械株式会社 | 常温接合装置及び常温接合方法 |
| JP6345605B2 (ja) * | 2015-01-16 | 2018-06-20 | 東京エレクトロン株式会社 | 接合装置、接合システムおよび接合方法 |
| JP6562795B2 (ja) * | 2015-02-12 | 2019-08-21 | キヤノン株式会社 | インプリント装置、および物品の製造方法 |
| US10597779B2 (en) * | 2015-06-05 | 2020-03-24 | Applied Materials, Inc. | Susceptor position and rational apparatus and methods of use |
| JP6039770B2 (ja) * | 2015-08-27 | 2016-12-07 | キヤノン株式会社 | インプリント装置およびデバイス製造方法 |
| JP6628681B2 (ja) * | 2016-04-28 | 2020-01-15 | 東京エレクトロン株式会社 | 接合装置、接合システムおよび接合方法 |
| KR102563272B1 (ko) * | 2016-08-26 | 2023-08-03 | 한화정밀기계 주식회사 | 틸팅 스테이지 시스템 |
| JP6936986B2 (ja) * | 2017-04-04 | 2021-09-22 | 旭化成エンジニアリング株式会社 | インプリント装置、インプリント装置の運転方法及びデバイスの製造方法 |
| JP6978859B2 (ja) * | 2017-06-15 | 2021-12-08 | キヤノン株式会社 | インプリント装置、および物品の製造方法 |
| CN108098393B (zh) * | 2018-01-02 | 2024-08-02 | 中电智能卡有限责任公司 | 应用于智能卡铣槽机的卡片承托平台及智能卡铣槽机 |
| US10672642B2 (en) * | 2018-07-24 | 2020-06-02 | Applied Materials, Inc. | Systems and methods for pedestal configuration |
| JP7243649B2 (ja) * | 2020-02-07 | 2023-03-22 | 株式会社Sumco | Soiウェーハの貼合わせ方法 |
| KR102442222B1 (ko) * | 2020-07-21 | 2022-09-13 | 한국기계연구원 | 임프린팅 장치 |
| JP7515340B2 (ja) | 2020-08-17 | 2024-07-12 | 東京エレクトロン株式会社 | 真空処理装置、及び真空処理装置の制御方法 |
| KR102731996B1 (ko) * | 2021-11-11 | 2024-11-20 | 한국기계연구원 | 각도 조정 및 정렬 기능을 갖는 임프린트 장치 및 임프린트 방법 |
| CN114573219B (zh) * | 2022-03-15 | 2023-03-24 | 哈尔滨工业大学 | 一种用于谐振子与电极基板焊接的谐振子位姿调整装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH088284B2 (ja) * | 1988-08-29 | 1996-01-29 | 株式会社日立製作所 | 半導体装置の製造方法及び装置 |
| JPH04223349A (ja) * | 1990-12-25 | 1992-08-13 | Mitsubishi Electric Corp | ギャングボンディング装置 |
| JP4426731B2 (ja) * | 2001-01-19 | 2010-03-03 | Towa株式会社 | 樹脂封止用のクランプ装置及びクランプ方法 |
| JP5434910B2 (ja) * | 2008-03-27 | 2014-03-05 | 株式会社ニコン | 接合装置および接合方法 |
-
2008
- 2008-07-25 JP JP2008192169A patent/JP5004891B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010034132A (ja) | 2010-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5004891B2 (ja) | 傾斜調整機構およびこの傾斜調整機構の制御方法 | |
| WO2011033797A1 (ja) | 加圧装置および加圧方法 | |
| JP4822577B2 (ja) | 実装方法および装置 | |
| KR101980415B1 (ko) | 임프린트 장치 및 물품 제조 방법 | |
| WO2009153925A1 (ja) | ナノインプリント方法及び装置 | |
| US20130037981A1 (en) | Imprint apparatus and article manufacturing method | |
| JP3938655B2 (ja) | アライメント装置 | |
| JP5256409B2 (ja) | 転写方法および転写装置 | |
| US20100086629A1 (en) | Transfer apparatus having gimbal mechanism and transfer method using the transfer apparatus | |
| JP2006116602A (ja) | 加圧装置の平行調整方法及び装置 | |
| JP5326148B2 (ja) | 転写方法および転写装置 | |
| JP4247296B1 (ja) | 積層接合装置および積層接合方法 | |
| JP2007096057A (ja) | 位置きめ方法及び位置決め装置及びデバイス | |
| JP4209456B1 (ja) | 積層接合装置用治具 | |
| JP5256410B2 (ja) | 転写方法および転写装置 | |
| JP6275632B2 (ja) | 常温接合装置及び常温接合方法 | |
| TWI527676B (zh) | Nano - level optical alignment and embossing leveling device | |
| WO2001091534A1 (fr) | Dispositif de montage de puces et procede d'alignement associe | |
| WO2021235269A1 (ja) | ボンディング装置及びボンディングヘッド調整方法 | |
| JP2004282819A (ja) | ウォーキング動作駆動ユニットおよびそれを用いたアライメント装置 | |
| TWM485590U (zh) | 奈米級光學對位及壓印調平裝置 | |
| JP2014110384A (ja) | インプリント装置、インプリント方法およびデバイス製造方法 | |
| JP2013161940A (ja) | 傾き調整方法および傾き調整装置 | |
| JP4148464B2 (ja) | ピエゾ駆動体を備えたアライメント装置の制御方法 | |
| JP7088552B2 (ja) | 近接露光装置及び近接露光方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110630 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120509 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120522 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120522 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150601 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5004891 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |