JP4958128B2 - 筋トーヌス計測装置 - Google Patents
筋トーヌス計測装置 Download PDFInfo
- Publication number
- JP4958128B2 JP4958128B2 JP2010517866A JP2010517866A JP4958128B2 JP 4958128 B2 JP4958128 B2 JP 4958128B2 JP 2010517866 A JP2010517866 A JP 2010517866A JP 2010517866 A JP2010517866 A JP 2010517866A JP 4958128 B2 JP4958128 B2 JP 4958128B2
- Authority
- JP
- Japan
- Prior art keywords
- joint
- phase
- dynamic
- muscle tonus
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 210000003205 muscle Anatomy 0.000 title claims description 64
- 210000002310 elbow joint Anatomy 0.000 claims description 26
- 230000003183 myoelectrical effect Effects 0.000 claims description 21
- 238000005452 bending Methods 0.000 claims description 11
- 230000005526 G1 to G0 transition Effects 0.000 claims description 9
- 238000004458 analytical method Methods 0.000 claims description 3
- 208000018737 Parkinson disease Diseases 0.000 description 44
- 238000010586 diagram Methods 0.000 description 27
- 238000001514 detection method Methods 0.000 description 20
- 238000005259 measurement Methods 0.000 description 15
- 206010044565 Tremor Diseases 0.000 description 13
- 238000000034 method Methods 0.000 description 10
- 206010052904 Musculoskeletal stiffness Diseases 0.000 description 9
- 230000008859 change Effects 0.000 description 9
- 238000011156 evaluation Methods 0.000 description 9
- 208000002740 Muscle Rigidity Diseases 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000002123 temporal effect Effects 0.000 description 4
- 230000005856 abnormality Effects 0.000 description 3
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 210000001503 joint Anatomy 0.000 description 3
- 230000000284 resting effect Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 208000008238 Muscle Spasticity Diseases 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 238000007405 data analysis Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 230000036541 health Effects 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 208000018360 neuromuscular disease Diseases 0.000 description 2
- 208000018198 spasticity Diseases 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 210000003857 wrist joint Anatomy 0.000 description 2
- CRRMRDNICWGIAV-UHFFFAOYSA-N C(C(C1)C2)C11CC2=CC1 Chemical compound C(C(C1)C2)C11CC2=CC1 CRRMRDNICWGIAV-UHFFFAOYSA-N 0.000 description 1
- BURACPJNIPNDGZ-UHFFFAOYSA-N CC1C=[O]CCC1 Chemical compound CC1C=[O]CCC1 BURACPJNIPNDGZ-UHFFFAOYSA-N 0.000 description 1
- FLWGCAJANMGQBB-UHFFFAOYSA-N CCCC1=CCCC1 Chemical compound CCCC1=CCCC1 FLWGCAJANMGQBB-UHFFFAOYSA-N 0.000 description 1
- 0 C[C@@]1(C2)C2*(CCC2)C2C1 Chemical compound C[C@@]1(C2)C2*(CCC2)C2C1 0.000 description 1
- 208000016285 Movement disease Diseases 0.000 description 1
- 230000000648 anti-parkinson Effects 0.000 description 1
- 239000000939 antiparkinson agent Substances 0.000 description 1
- 208000018300 basal ganglia disease Diseases 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000000875 corresponding effect Effects 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000012631 diagnostic technique Methods 0.000 description 1
- 230000004069 differentiation Effects 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000010494 dissociation reaction Methods 0.000 description 1
- 230000005593 dissociations Effects 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 210000000245 forearm Anatomy 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 210000002478 hand joint Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003387 muscular Effects 0.000 description 1
- 230000004770 neurodegeneration Effects 0.000 description 1
- 208000015122 neurodegenerative disease Diseases 0.000 description 1
- 238000010984 neurological examination Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 230000008506 pathogenesis Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000011002 quantification Methods 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 230000001225 therapeutic effect Effects 0.000 description 1
- 230000036962 time dependent Effects 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
- 230000021542 voluntary musculoskeletal movement Effects 0.000 description 1
Images
















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/22—Ergometry; Measuring muscular strength or the force of a muscular blow
- A61B5/224—Measuring muscular strength
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1107—Measuring contraction of parts of the body, e.g. organ or muscle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1124—Determining motor skills
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1126—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb using a particular sensing technique
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/389—Electromyography [EMG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/40—Detecting, measuring or recording for evaluating the nervous system
- A61B5/4076—Diagnosing or monitoring particular conditions of the nervous system
- A61B5/4082—Diagnosing or monitoring movement diseases, e.g. Parkinson, Huntington or Tourette
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4519—Muscles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0247—Pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/45—For evaluating or diagnosing the musculoskeletal system or teeth
- A61B5/4528—Joints
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Molecular Biology (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Physiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Neurology (AREA)
- Neurosurgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rheumatology (AREA)
- Physical Education & Sports Medicine (AREA)
- Developmental Disabilities (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Description

角度−トルク特性図において、全施行の屈曲相の全データポイントのうち関節角度が10°〜110°の範囲を抽出し、その回帰直線を求めた。そして回帰直線の傾きを動的屈曲相のバネ係数と定義した。動的伸展相のバネ係数も同様に定義した。
角度−トルク特性図において、ある一つの関節角度における屈曲相の全施行のトルクの平均値を動的屈曲相のバイアスと定義した。動的伸展相のバイアスも同様に定義した。動的屈曲相のバイアスと動的伸展相のバイアスとの差をバイアス差と定義した。30°、60°、90°の3つの関節角度についてバイアス差を計算し、それらの和をバイアス差の和と定義した。
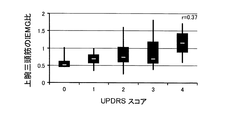
最大屈曲相(最大屈曲位静止時)と最大伸展相(最大伸展位静止時)のそれぞれの表面筋電図波形を2.5Hzのローパスフィルターを用いて整流平滑化した。次いで、整流平滑化した筋電図波形の1秒間における積分値(Integrated EMG=IEMG)を計算した。上腕二頭筋のIEMG比を、(上腕二頭筋のIEMG比)=(最大伸展相におけるIEMG)/(最大屈曲相におけるIEMG)と定義した。上腕三頭筋のIEMG比を、(上腕三頭筋のIEMG比)=(最大屈曲相におけるIEMG)/(最大伸展相におけるIEMG)と定義した。IEMG比は、筋が受動的に伸展された状態での筋電活動の強さを示す特徴量である。上腕二頭筋及び上腕三頭筋のそれぞれについて、IEMG比を求めた。
11 ベース
12a,12b 挟持板
13 架橋板
20a,20b 力覚センサ
21 力覚センサ用アンプ
30 ジャイロセンサ
40a,40b 表面電極
41 筋電図用アンプ
50 演算装置
51 A/D変換ボード
52 出力装置
Claims (7)
- 被験者の関節を屈曲伸展運動させるために加えられる力を検出する少なくとも1つの力覚センサと、被験者の関節の関節角度を測定するためのセンサとを備え、
前記力覚センサで検出した力から関節を屈曲伸展させるための関節トルクを算出し、
被験者の関節を屈曲伸展運動させたときの前記関節トルク及び前記関節角度の経時的変化を、最大伸展位静止相、動的屈曲相、最大屈曲位静止相、及び、動的伸展相に分離し、
前記動的屈曲相及び前記動的伸展相の少なくとも一方における前記関節角度と前記関節トルクとの関係から筋トーヌス特徴量を抽出することを特徴とする筋トーヌス計測装置。 - 前記筋トーヌス特徴量が、関節のバネ係数を含む請求項1に記載の筋トーヌス計測装置。
- 前記バネ係数が、前記動的屈曲相及び前記動的伸展相におけるバネ係数である請求項2に記載の筋トーヌス計測装置。
- 前記筋トーヌス特徴量が、前記動的屈曲相における前記関節角度と前記関節トルクとの関係と、前記動的伸展相における前記関節角度と前記関節トルクとの関係との差に基づく特徴量を含む請求項1〜3のいずれかに記載の筋トーヌス計測装置。
- 表面筋電位を測定する表面電極を更に備え、前記最大屈曲位静止相及び前記最大伸展位静止相における前記表面筋電位から筋電活動特徴量を更に抽出する請求項1〜4のいずれかに記載の筋トーヌス計測装置。
- 前記関節トルクを周波数解析することにより関節トルク特徴量を更に抽出する請求項1〜5のいずれかに記載の筋トーヌス計測装置。
- 前記関節が肘関節である請求項1〜6のいずれかに記載の筋トーヌス計測装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010517866A JP4958128B2 (ja) | 2008-06-20 | 2009-06-10 | 筋トーヌス計測装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008162048 | 2008-06-20 | ||
| JP2008162048 | 2008-06-20 | ||
| PCT/JP2009/060615 WO2009154117A1 (ja) | 2008-06-20 | 2009-06-10 | 筋トーヌス計測装置 |
| JP2010517866A JP4958128B2 (ja) | 2008-06-20 | 2009-06-10 | 筋トーヌス計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2009154117A1 JPWO2009154117A1 (ja) | 2011-12-01 |
| JP4958128B2 true JP4958128B2 (ja) | 2012-06-20 |
Family
ID=41434033
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010517866A Active JP4958128B2 (ja) | 2008-06-20 | 2009-06-10 | 筋トーヌス計測装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20110087128A1 (ja) |
| EP (1) | EP2305118B1 (ja) |
| JP (1) | JP4958128B2 (ja) |
| CN (1) | CN102065766B (ja) |
| WO (1) | WO2009154117A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180035669A (ko) * | 2016-09-29 | 2018-04-06 | 울산과학기술원 | 상지 다관절 임피던스 측정 방법 및 그 장치 |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011007569A1 (ja) * | 2009-07-15 | 2011-01-20 | 国立大学法人筑波大学 | 分類推定システムおよび分類推定プログラム |
| JP5339260B2 (ja) * | 2010-05-17 | 2013-11-13 | 国立大学法人大阪大学 | 筋トーヌス計測装置 |
| US20120165703A1 (en) * | 2010-12-22 | 2012-06-28 | Paul William Bottum | Preempt Muscle Map Screen |
| US20120184871A1 (en) * | 2011-01-14 | 2012-07-19 | Seungjin Jang | Exercise monitor and method for monitoring exercise |
| TWI549655B (zh) * | 2012-05-18 | 2016-09-21 | 國立成功大學 | 關節活動度量測裝置及其量測方法 |
| CN103222866B (zh) * | 2013-04-09 | 2014-12-17 | 北京航空航天大学 | 人体上肢舒适作业范围测量装置 |
| JP6061300B2 (ja) * | 2013-06-17 | 2017-01-18 | 国立大学法人 鹿児島大学 | 片麻痺運動機能回復訓練装置を用いた訓練効果評価方法、および訓練効果評価演算装置、ならびにプログラム |
| CN103371903B (zh) * | 2013-07-02 | 2016-06-01 | 孤独求败公司 | 一种物理传感治疗床 |
| CN103393420B (zh) * | 2013-07-30 | 2015-06-17 | 中国科学技术大学 | 一种高密度有源柔性电极阵列及其信号调理电路 |
| TWM475293U (en) * | 2013-08-23 | 2014-04-01 | Bion Inc | Wearing-type sensing device for muscle strength training |
| CN103417218A (zh) * | 2013-08-27 | 2013-12-04 | 中山大学附属第一医院 | 一种上肢运动的参数采集评估系统及方法 |
| JP6498678B2 (ja) * | 2013-09-20 | 2019-04-10 | エムディディティ・インコーポレイテッドMddt Inc. | 運動障害の診断および処置 |
| JP6385194B2 (ja) * | 2014-08-18 | 2018-09-05 | 国立大学法人大阪大学 | 筋トーヌス計測装置 |
| EP3282947B1 (en) * | 2015-04-14 | 2020-09-02 | INESC TEC - Instituto de Engenharia de Sistemas e Computadores, Tecnologia e Ciência | Wrist rigidity assessment device for use in deep brain stimulation surgery |
| CN105726039B (zh) * | 2016-03-31 | 2019-01-29 | 合肥工业大学 | 一种肢体痉挛评测方法及实现该方法的装置 |
| JP2019122655A (ja) * | 2018-01-18 | 2019-07-25 | パシフィックメディコ株式会社 | 筋電位取得装置 |
| CN108784720B (zh) * | 2018-03-15 | 2020-09-25 | 安徽工程大学 | 基于肌张力传感器的痉挛检测的控制系统及其检测方法 |
| JP6756787B2 (ja) | 2018-08-27 | 2020-09-16 | 本田技研工業株式会社 | 筋力特性取得方法、及び、筋力特性取得装置 |
| WO2020049580A1 (en) * | 2018-09-05 | 2020-03-12 | Balamurugan L | Apparatus and method for muscle tone measurement |
| CN109157233A (zh) * | 2018-10-25 | 2019-01-08 | 成都恩漫科技有限公司 | 一种关节功能测试训练系统 |
| CN110051362A (zh) * | 2019-06-04 | 2019-07-26 | 常州迪普医疗器械科技有限公司 | 关节运动智能测量系统及测量方法 |
| WO2022146402A1 (en) * | 2020-12-31 | 2022-07-07 | Bogazici Universitesi | A mobile measurement system for evaluating rigidity |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0759759A (ja) * | 1993-08-28 | 1995-03-07 | Sony Corp | 筋トーヌス状態判断方法、筋トーヌス状態判断装置、身体適合性判断方法、異常部位判断方法及び情報同定方法 |
| JPH10149445A (ja) * | 1996-11-19 | 1998-06-02 | Image Joho Kagaku Kenkyusho | 身体動作解析可視化装置 |
| JP2001054507A (ja) * | 1999-08-17 | 2001-02-27 | Sony Corp | 筋電位情報を利用したモーションキャプチャー装置とその制御方法、並びにこれを用いた電気刺激装置、力触覚呈示装置とこれらの制御方法 |
| JP2006014837A (ja) * | 2004-06-30 | 2006-01-19 | Honda Motor Co Ltd | 運動測定方法、運動測定装置及び運動測定プログラム |
| JP2007061121A (ja) * | 2005-08-29 | 2007-03-15 | Univ Kansai | 身体の動作解析方法、システムおよびプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4667513A (en) * | 1981-03-18 | 1987-05-26 | Konno Yoshio | Method and apparatus for detecting muscle fatigue |
| US4664130A (en) * | 1985-06-06 | 1987-05-12 | Diagnospine Research Inc. | Method and equipment for the detection of mechanical injuries in the lumbar spine of a patient |
| CA1297952C (en) * | 1987-10-05 | 1992-03-24 | Diagnospine Research Inc. | Method and equipment for evaluating the flexibility of a human spine |
| US5579783A (en) * | 1993-08-28 | 1996-12-03 | Sony Corporation | O-ring test method and apparatus for measuring muscular strength |
| GB9500064D0 (en) * | 1995-01-04 | 1995-03-01 | Univ Alberta | Differential dynamometer |
| US5919148A (en) * | 1996-03-27 | 1999-07-06 | Marko; Alexei J. | Apparatus and method for evaluation of shoulder stability |
| AU2001294525A1 (en) * | 2000-09-06 | 2002-03-22 | Johns Hopkins University | Quantification of muscle tone |
-
2009
- 2009-06-10 CN CN2009801231528A patent/CN102065766B/zh not_active Expired - Fee Related
- 2009-06-10 US US12/999,556 patent/US20110087128A1/en not_active Abandoned
- 2009-06-10 JP JP2010517866A patent/JP4958128B2/ja active Active
- 2009-06-10 EP EP09766565.7A patent/EP2305118B1/en not_active Not-in-force
- 2009-06-10 WO PCT/JP2009/060615 patent/WO2009154117A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0759759A (ja) * | 1993-08-28 | 1995-03-07 | Sony Corp | 筋トーヌス状態判断方法、筋トーヌス状態判断装置、身体適合性判断方法、異常部位判断方法及び情報同定方法 |
| JPH10149445A (ja) * | 1996-11-19 | 1998-06-02 | Image Joho Kagaku Kenkyusho | 身体動作解析可視化装置 |
| JP2001054507A (ja) * | 1999-08-17 | 2001-02-27 | Sony Corp | 筋電位情報を利用したモーションキャプチャー装置とその制御方法、並びにこれを用いた電気刺激装置、力触覚呈示装置とこれらの制御方法 |
| JP2006014837A (ja) * | 2004-06-30 | 2006-01-19 | Honda Motor Co Ltd | 運動測定方法、運動測定装置及び運動測定プログラム |
| JP2007061121A (ja) * | 2005-08-29 | 2007-03-15 | Univ Kansai | 身体の動作解析方法、システムおよびプログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180035669A (ko) * | 2016-09-29 | 2018-04-06 | 울산과학기술원 | 상지 다관절 임피던스 측정 방법 및 그 장치 |
| KR102013854B1 (ko) | 2016-09-29 | 2019-08-23 | 울산과학기술원 | 상지 다관절 임피던스 측정 방법 및 그 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2009154117A1 (ja) | 2011-12-01 |
| CN102065766A (zh) | 2011-05-18 |
| EP2305118B1 (en) | 2017-01-04 |
| US20110087128A1 (en) | 2011-04-14 |
| EP2305118A1 (en) | 2011-04-06 |
| EP2305118A4 (en) | 2014-05-14 |
| CN102065766B (zh) | 2013-01-02 |
| WO2009154117A1 (ja) | 2009-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4958128B2 (ja) | 筋トーヌス計測装置 | |
| JP5385555B2 (ja) | 生体検査システム、生体検査装置および生体検査方法 | |
| Jalloul | Wearable sensors for the monitoring of movement disorders | |
| Bar-On et al. | A clinical measurement to quantify spasticity in children with cerebral palsy by integration of multidimensional signals | |
| Hoffmann et al. | Respiratory monitoring system on the basis of capacitive textile force sensors | |
| US20040167420A1 (en) | Apparatus and method for analyzing motions using bio-impedance | |
| JP5339260B2 (ja) | 筋トーヌス計測装置 | |
| US8337427B2 (en) | Method of estimating finger-tapping force | |
| JP4292247B2 (ja) | 動作解析装置およびその利用 | |
| Wiard et al. | Automatic detection of motion artifacts in the ballistocardiogram measured on a modified bathroom scale | |
| Formstone et al. | Quantification of motor function post-stroke using novel combination of wearable inertial and mechanomyographic sensors | |
| JP2020151470A (ja) | 歩行評価装置、歩行評価方法およびプログラム | |
| JP2018515181A (ja) | 脳深部刺激手術用の手首固縮評価装置 | |
| JP6385194B2 (ja) | 筋トーヌス計測装置 | |
| Turk et al. | Reliability and sensitivity of a wrist rig to measure motor control and spasticity in poststroke hemiplegia | |
| CN106725305A (zh) | 基于人体姿态角的疼痛程度评估方法及系统 | |
| Hernandez et al. | From on-body sensors to in-body data for health monitoring and medical robotics: A survey | |
| Boukhenous et al. | Force platform for postural balance analysis | |
| Song et al. | Validation of a wearable position, velocity, and resistance meter for assessing spasticity and rigidity | |
| Song et al. | Design of a portable position, velocity, and resistance meter (PVRM) for convenient clinical evaluation of spasticity or rigidity | |
| Dutta et al. | Development of a smart glove for affordable diagnosis of stroke-driven upper extremity paresis | |
| KR20060036965A (ko) | 생체 임피던스를 이용한 무선 동작 분석기 | |
| US20220192582A1 (en) | Analysis system with a portable connected device | |
| Wang | Estimation of human skeletal muscles' contraction with circumferential measurements based on smart fabric sensing technology | |
| Alhajjar et al. | 3D GUI system for upper limb rehabilitation using electromyography and inertia measurement unit sensor feedback |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120306 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120313 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150330 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4958128 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |