JP3662747B2 - 車両の挙動制御装置 - Google Patents
車両の挙動制御装置 Download PDFInfo
- Publication number
- JP3662747B2 JP3662747B2 JP24701398A JP24701398A JP3662747B2 JP 3662747 B2 JP3662747 B2 JP 3662747B2 JP 24701398 A JP24701398 A JP 24701398A JP 24701398 A JP24701398 A JP 24701398A JP 3662747 B2 JP3662747 B2 JP 3662747B2
- Authority
- JP
- Japan
- Prior art keywords
- yaw rate
- target yaw
- vehicle
- calculated
- calculation unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Hydraulic Control Valves For Brake Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Description
【発明の属する技術分野】
本発明は、車両の挙動制御装置に関するものであり、特に、走行時における車両のドリフトアウトやスピン等の異常な車両挙動を抑制するための車両の挙動制御装置に関するものである。
【0002】
【従来の技術】
車両のドリフトアウトやスピン等の不安定状態の発生を検出して該ドリフトアウトやスピンを抑制するように車両の挙動を制御する従来の制御装置は、各種センサから得られるデータを基にして算出される目標ヨーレートとヨーレートセンサから得られる車両のヨーレートとの偏差に応じて車両の挙動を制御していた。例えば、特開平6−183288号公報及び特開平7−223520号公報では、車速及びステアリング舵角から算出されるヨーレートを路面の摩擦係数μ等に応じて制限をかけて目標ヨーレートとしている。
【0003】
【発明が解決しようとする課題】
しかし、路面の状態に応じて目標ヨーレートを制限する従来の方法では、ドライバが行う操舵の状態をまったく考慮していないため、操舵追従性が悪くなるという問題があった。
【0004】
本発明は、上記のような問題を解決するためになされたものであり、ステアリング舵角と車体速度から算出した第1目標ヨーレートよりも、車両の横方向の加減速度と車体速度から算出した第2目標ヨーレートが小さく、第2目標ヨーレートを目標ヨーレートとして使用する場合、第1目標ヨーレートと第2目標ヨーレートとの差に応じた補正値、又は該補正値を更にステアリングの操舵速度に応じて補正した補正値を第2目標ヨーレートに加算するようにして、車両の走行安定性を低下させず、操舵追従性を悪化させることなく維持できる車両の挙動制御装置を得ることを目的とする。
【0005】
【課題を解決するための手段】
この発明に係る車両の挙動制御装置は、各種センサから得られるデータを基にして算出される目標ヨーレートとヨーレートセンサから得られる車両のヨーレートとの偏差から、車両状態の判定を行い、該判定に応じて所定の制動力制御及び駆動力制御を行って車両の挙動制御を行う挙動制御装置において、ステアリングの操舵角を検出する舵角センサから得られたステアリング舵角を用いて第1目標ヨーレートを算出する第1目標ヨーレート算出手段と、車両の横方向の加減速度を検出する横加速度センサから得られた横加減速度を用いて第2目標ヨーレートを算出する第2目標ヨーレート算出手段と、第1目標ヨーレートと第2目標ヨーレートとを比較し、絶対値の小さい方を目標ヨーレートとする目標ヨーレート算出手段とを備え、目標ヨーレート算出手段は、第2目標ヨーレートを目標ヨーレートとする際、第1目標ヨーレートと第2目標ヨーレートとの差に応じた第1補正値を第2目標ヨーレートに加算して補正するものである。
【0006】
また、目標ヨーレート算出手段は、第2目標ヨーレートを用いて目標ヨーレートを算出する際、第1補正値をステアリング舵角の角速度に応じて補正した第2補正値を、第1補正値に代えて第2目標ヨーレートに加算して補正するようにしてもよい。
【0007】
更に、目標ヨーレート算出手段は、算出した目標ヨーレートとヨーレートセンサから得られるヨーレートとの偏差に、所定の時定数で追従する低周波フィルタ処理を施した、偏差フィルタ値を算出し、算出した目標ヨーレートに該偏差フィルタ値を加算して補正するようにしてもよい。
【0008】
【発明の実施の形態】
次に、図面に示す実施の形態に基づいて、本発明を詳細に説明する。
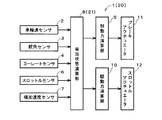
図1は、本発明の実施の形態1における車両の挙動制御装置の例を示した概略のブロック図である。
【0009】
図1において、車両の挙動制御装置1は、各車輪の車輪速度を検出する車輪速センサ2、ステアリングの操舵角を検出する舵角センサ3、車両に発生しているヨーレートを検出するヨーレートセンサ4、スロットル開度を検出するスロットルセンサ6及び車両の横方向の加減速度を検出する横加速度センサ7の各種センサと、該各センサからの入力信号より車両の状態を判定するための様々なデータを算出すると共に該算出したデータから、オーバステア状態を解消するように行われる制御であるオーバステア制御及びアンダステア状態を解消するように行われる制御であるアンダステア制御の実施判定を行う車両状態演算部8とを備えている。
【0010】
更に、車両の挙動制御装置1は、車両状態演算部8からの様々なデータ及び各種判定から各車輪に対する制動力の制御量を算出する制動力演算部9と、車両状態演算部8からの各データ及び各種判定から駆動力の制御量を算出する駆動力演算部10と、制動力演算部9で算出された制動力の制御量から各車輪のブレーキ制御を行うブレーキアクチュエータ11と、駆動力演算部10で算出された駆動力の制御量からスロットルの制御を行うスロットルアクチュエータ12とを備えている。
【0011】
車輪速センサ2、舵角センサ3、ヨーレートセンサ4、スロットルセンサ6及び横加速度センサ7は、それぞれ車両状態演算部8に接続され、該車両状態演算部8は制動力演算部9及び駆動力演算部10にそれぞれ接続され、制動力演算部9はブレーキアクチュエータ11に、駆動力演算部10はスロットルアクチュエータ12に接続されている。
【0012】
このような構成において、車両状態演算部8は、車輪速センサ2からの入力信号より得られた各車輪の車輪速度から車体速度Vを算出すると共に、舵角センサ3からの入力信号よりステアリング舵角δを、ヨーレートセンサ4からの入力信号より車両の実際のヨーレートである実ヨーレートωrを、スロットルセンサ6からの入力信号よりスロットル開度を、横加速度センサ7からの入力信号より横方向の加減速度Gyをそれぞれ得る。車両状態演算部8は、これら各センサからのそれぞれの入力信号から得られた各値より、車両の状態を判定するための様々なデータの算出を行い、該算出した各データから車両の挙動制御であるオーバステア制御及びアンダステア制御の実施判定を行う。
【0013】
制動力演算部9は、車両状態演算部8で算出された各データ及び上記各制御実施判定から各車輪の制動力の制御量を算出してブレーキアクチュエータ11の制御を行う。また、駆動力演算部10は、車両状態演算部8で算出された各データ及び上記各制御実施判定から駆動力の制御量を算出してスロットルアクチュエータ12の制御を行う。
【0014】
次に、車両状態演算部8によるオーバステア制御及びアンダステア制御からなる車両の挙動制御の実施判定方法について説明する。
車両状態演算部8は、上記各センサから得られた値の内、車体速度V及びステアリング舵角δを用いて第1目標ヨーレートω1を下記(1)式より算出する。
ω1=V×δ/{(1−k×V2)×L} ……………(1)
なお、上記(1)式において、kはスタビリティファクタであり高μ(摩擦係数)路を旋回する場から求めた定数であり、Lはホイールベースを示す定数である。
【0015】
次に、車両状態演算部8は、各センサから得られた値の内、車体速度V及び横方向の加減速度Gyを用いて第2目標ヨーレートω2を下記(2)式より算出する。
ω2=Gy/V ………………………………………(2)
【0016】
更に、車両状態演算部8は、第1目標ヨーレートω1と第2目標ヨーレートω2の内、絶対値の小さい方の値を選択し、第1目標ヨーレートω1を選択すると、該第1目標ヨーレートω1を第3目標ヨーレートω3とする。
【0017】
一方、車両状態演算部8は、第2目標ヨーレートω2を選択すると、第1目標ヨーレートω1と第2目標ヨーレートω2との差に応じた補正値ωm1を、例えば下記(3)式より算出する。
ωm1=(ω1−ω2)×g(ω1)………………………(3)
上記(3)式において、g(ω1)は、第1目標ヨーレートω1に関する関数であり、第1目標ヨーレートω1に応じて図2で示すような変化をする。
【0018】
次に、車両状態演算部8は、下記(4)式で示しているように、算出した補正値ωm1を第2目標ヨーレートω2に加算して第3目標ヨーレートω3とする。
ω3=ω2+ωm1 ……………………………………(4)
【0019】
ここで、車両状態演算部8は、車両が走行している路面が傾斜している場合、横加速度センサ7で検出した横方向の加減速度Gyが実際の値から変化する。このことによって、上記(2)式で算出した第2目標ヨーレートω2は、本来の期待する値に対して次第にオフセットを持つようになる。そこで、車両状態演算部8は、上記(2)式で算出した第2目標ヨーレートω2に発生するオフセットを、徐々にキャンセルして補正する低周波の補正値を算出する。
【0020】
上記低周波の補正値である低周波フィルタ値Δωf(n)の算出方法は公知であり、車両状態演算部8は、例えば低周波フィルタ値Δωf(n)を下記(5)式より算出する。なお、Δωf(n)におけるnは、自然数であり制御サイクル数を示している。
Δωf(n)=Δωf(n−1)×(k1−1)/k1+(ω r −ω 3)/k1……(5)
上記(5)式において、k1は定数であり、Δωf(n)は、今回の制御サイクルにおける低周波フィルタ値であり、Δωf(n−1)は、前回の制御サイクルにおける低周波フィルタ値である。また、最初の制御サイクル、すなわちn=1の場合、Δωf(0)=0とする。
【0021】
車両状態演算部8は、下記(6)式で示しているように、算出した低周波フィルタ値Δωf(n)を第3目標ヨーレートω3に加算して目標ヨーレートωtとする。
ωt=ω3+Δωf(n)………………………………(6)
【0022】
次に、車両状態演算部8は、このようにして得られた目標ヨーレートωtとヨーレートセンサ4から得られた実ヨーレートωrとの比較を行い、偏差であるヨーレート偏差Δωを算出する。ヨーレート偏差Δωは下記(7)式より算出される。
Δω=ωr−ωt ……………………………………(7)
【0023】
例えば、ヨーレートセンサ4の極性が左回りのときに正、右回りのときに負とすると、車両状態演算部8は、車両が左旋回を行っている場合、算出したヨーレート偏差Δωが、正の値であるオーバステアしきい値Thosを超えるとオーバステア制御開始判定を行い、算出したヨーレート偏差Δωが、負の値であるアンダステアしきい値Thus未満であるとアンダステア制御開始判定を行う。また、車両が右旋回を行っている場合、車両状態演算部8は算出したヨーレート偏差Δωが、負の値であるオーバステアしきい値Thos未満であるとオーバステア制御開始判定を行い、算出したヨーレート偏差Δωが、正の値であるアンダステアしきい値Thusを超えるとアンダステア制御開始判定を行う。
【0024】
制動力演算部9及び駆動力演算部10は、ブレーキアクチュエータ11及びスロットルアクチュエータ12に対して、車両状態演算部8がオーバステア制御開始判定を行うと所定のオーバステア制御を行わせ、車両状態演算部8がアンダステア制御開始判定を行うと所定のアンダステア制御を行わせる。なお、本実施の形態では、車両の旋回方向に応じて正又は負となる値については、左回りを正、右回りを負となる場合を例にして説明する。
【0025】
オーバステア制御として、制動力演算部9は、オーバステア状態を解消するために外前輪に付加する制動力制動量を算出する。該制動力制御量は、ヨーレート偏差Δωが大きい、すなわちオーバステアの度合いが大きいときほど大きい値が、ヨーレート偏差Δωが小さい、すなわちオーバステアの度合いが小さいときほど小さい値が算出される。同時に、駆動力演算部10は、所定の方法で駆動力制御量を算出し、例えば駆動力を減少させるようにする。
【0026】
また、アンダステア制御として、制動力演算部9は、アンダステア状態を解消するために内後輪に付加する制動力制動量を算出する。該制動力制御量は、ヨーレート偏差Δωが大きい、すなわちアンダステアの度合いが大きいときほど大きい値が、ヨーレート偏差Δωが小さい、すなわちアンダステアの度合いが小さいときほど小さい値が算出される。同時に、駆動力演算部10は、所定の方法で駆動力制御量を算出し、例えば駆動力を減少させるようにする。
【0027】
このように、横方向の加減速度Gyを用いて算出される第2目標ヨーレートω2を目標ヨーレートωtに用いる場合、図2から分かるように第1目標ヨーレートω1と第2目標ヨーレートω2との差の5〜20%の値を算出し、該算出した値を第2目標ヨーレートω2に加算し補正した。更に該補正した値に低周波フィルタ値Δωf(n)を加算して目標ヨーレートωtとした。
【0028】
次に、図3は、図1で示した車両の挙動制御装置1の動作例を示したフローチャートであり、図4は、図3における目標ヨーレートωtの算出ルーチンの例を示したフローチャートである。図3及び図4を用いて車両の挙動制御装置1の動作についてもう少し詳細に説明する。
【0029】
図3において、ステップS1で、車両状態演算部8は、車輪速センサ2からの入力信号より得られる各車輪の車輪速度から車体速度Vを算出すると共に、舵角センサ3からの入力信号よりステアリング舵角δを、ヨーレートセンサ4からの入力信号より実ヨーレートωrを、スロットルセンサ6からの入力信号よりスロットル開度を、横加速度センサ7からの入力信号より横方向の加減速度Gyをそれぞれ得る。次に、車両状態演算部8は、ステップS2で、目標ヨーレートωtを算出する。
【0030】
ここで、上記ステップS2で示した車両状態演算部8による目標ヨーレートωtの算出例を、図4のフローチャートを用いて説明する。なお、特に明記しない限り、図4で行われる処理はすべて車両状態演算部8で行われるものである。
図4において、ステップS11で、上記(1)式を用いて第1目標ヨーレートω1を算出すると共に上記(2)式を用いて第2目標ヨーレートω2を算出する。次に、ステップS12で、第1目標ヨーレートω1の絶対値と第2目標ヨーレートω2の絶対値とを比較し第2目標ヨーレートω2の絶対値が第1目標ヨーレートω1の絶対値よりも小さいか否かを調べる。第2目標ヨーレートω2の絶対値が第1目標ヨーレートω1の絶対値よりも小さい場合(YES)、ステップS13に進む。
【0031】
ステップS13で、上記(3)式を用いて補正値ωm1を算出した後、ステップS14で、上記(4)式のように、第2目標ヨーレートω2に補正値ωm1を加算して第3目標ヨーレートω3を算出する。次に、ステップS15で、上記(5)式を用いて低周波フィルタ値Δωf(n)を算出し、ステップS16で、上記(6)式のように、第3目標ヨーレートω3に低周波フィルタ値Δωf(n)を加算して目標ヨーレートωtを算出して、本フローは終了し図3のステップS3に進む。また、ステップS12で、第2目標ヨーレートω2の絶対値よりも第1目標ヨーレートω1の絶対値の方が小さい場合(NO)、ステップS17に進み、第1目標ヨーレートω1を第3目標ヨーレートω3とした後、ステップS15に進む。
【0032】
次に、図3に戻り、ステップS3において、ステップS1で得た実ヨーレートωr及びステップS2で算出した目標ヨーレートωtからヨーレート偏差Δωを算出する。次に、ステップS4で、車両状態演算部8は、オーバステアしきい値Thos及びアンダステアしきい値Thusの各しきい値を算出して設定する。
【0033】
ステップS5で、車両状態演算部8は、ステップS3で算出したヨーレート偏差ΔωとステップS4で設定されたオーバステアしきい値Thosとの比較を行い、オーバステア制御を開始するか否かの判定を行う。例えば、ヨーレートセンサ4の極性が左回りのとき正、右回りのときに負であるとすると、左旋回時においては、オーバステアしきい値Thosは正の値となり、ヨーレート偏差Δωがオーバステアしきい値Thosを超えているか否かを調べる。車両状態演算部8は、ヨーレート偏差Δωがオーバステアしきい値Thosを超え、オーバステア制御を開始する判定を行うと(YES)、ステップS6に進む。
【0034】
ステップS6で、車両状態演算部8のオーバステア制御開始判定により、制動力演算部9は外前輪制動力の制動量の算出を行い、駆動力演算部10は駆動力の制御量を算出する。次に、ステップS7で、制動力演算部9は該算出した制動量の外前輪制動力制御の実施をブレーキアクチュエータ11に実行させ、駆動力演算部10は駆動量の駆動制御の実施をスロットルアクチュエータに実行させて本フローは終了する。
【0035】
また、ステップS5で、例えばヨーレート偏差Δωがオーバステアしきい値Thos以下であって、オーバステア制御開始の判定が行われなかった場合(NO)、ステップS8に進む。ステップS8で、車両状態演算部8は、ステップS3で算出したヨーレート偏差ΔωとステップS4で設定されたアンダステアしきい値Thusとの比較を行い、アンダステア制御を開始するか否かの判定を行う。例えば、ヨーレートセンサ4の極性が左回りのとき正、右回りのときに負であるとすると、左旋回時においては、アンダステアしきい値Thusは負の値となり、ヨーレート偏差Δωがアンダステアしきい値Thus未満であるか否かを調べ、ヨーレート偏差Δωがアンダステアしきい値Thus未満であり、アンダステア制御を開始する判定を行うと(YES)、ステップS9に進む。
【0036】
ステップS9で、車両状態演算部8のアンダステア制御開始判定により、制動力演算部9は内後輪制動力の制動量の算出を行い、駆動力演算部10は駆動力の制御量を算出した後、ステップS7の処理を行ってステップS1に戻る。また、ステップS8で、例えばヨーレート偏差Δωがアンダステアしきい値Thus以上であって、アンダステア制御開始の判定が行われなかった場合(NO)、ステップS1に戻る。
【0037】
このように、本実施の形態1における車両の挙動制御装置は、ステアリング舵角δを用いて算出される第1目標ヨーレートω1の絶対値よりも横方向の加減速度Gyを用いて算出される第2目標ヨーレートω2の絶対値の方が小さく、第2目標ヨーレートω2を目標ヨーレートωtとして用いる場合、第1目標ヨーレートω1と第2目標ヨーレートω2との差に対する、第1目標ヨーレートω1に応じた5〜20%の補正値ωm1を算出し、該算出した補正値ωm1を第2目標ヨーレートω2に加算して補正した。このことから、操舵追従性の低下を防止することができると共に、目標ヨーレートωtが過大となって走行安定性が低下することを防止できる。
【0038】
更に、本実施の形態1における車両の挙動制御装置は、第2目標ヨーレートω2に低周波フィルタ値を加算することによって、横加速度センサのドリフトや路面の傾きによるセンサ値の誤差を偏差フィルタで補正しており、該センサ値の誤差による目標ヨーレートωtと実ヨーレートωrの疑似偏差で、車両の挙動制御が過剰又は過小になることを防止できる。
【0039】
実施の形態2.
上記実施の形態1では、補正値ωm1を算出する際、ドライバによる操舵速度を考慮していなかったが、該補正値ωm1をドライバによる操舵速度に応じて変えるようにしてもよく、このようにしたものを本発明の実施の形態2とする。
なお、本発明の実施の形態2における車両の挙動制御装置の例を示した概略のブロック図は、図1の車両状態演算部8を車両状態演算部21に、図1の車両の挙動制御装置1を車両の挙動制御装置20にしたこと以外は図1と同じであるので省略し、図1を参照しながら車両状態演算部8を車両状態演算部21に置き換えて図1との相違点のみ説明する。
【0040】
車両状態演算部21は、上記(1)式及び(2)式を用いて、第1目標ヨーレートω1及び第2目標ヨーレートω2をそれぞれ算出する。更に、車両状態演算部21は、該算出した第1目標ヨーレートω1及び第2目標ヨーレートω2の内、絶対値の小さい方の値を選択し、第1目標ヨーレートω1を選択すると該第1目標ヨーレートω1を第3目標ヨーレートω3とする。
【0041】
一方、車両状態演算部21は、第2目標ヨーレートω2を選択すると、第1目標ヨーレートω1と第2目標ヨーレートω2との差に応じた補正値ωm2を、例えば下記(7)式より算出する。
ωm2=(ω1−ω2)×g(ω1)×h(δ’)………………………(7)
上記(7)式において、h(δ’)は、ステアリング舵角δを微分して得られるステアリング角速度δ’に関する関数であり、ステアリング角速度δ’に応じて図5で示すような変化をする。
【0042】
次に、車両状態演算部21は、下記(8)式で示しているように、算出した補正値ωm2を第2目標ヨーレートω2に加算して第3目標ヨーレートω3とする。
ω3=ω2+ωm2 ……………………………………(8)
【0043】
更に、車両状態演算部21は、上記(6)式で示しているように、(5)式を用いて算出した低周波フィルタ値Δωf(n)を上記(8)式の第3目標ヨーレートω3に加算して目標ヨーレートωtとする。
【0044】
このように、横方向の加減速度Gyを用いて算出される第2目標ヨーレートω2を目標ヨーレートωtに用いる場合、第1目標ヨーレートω1と第2目標ヨーレートω2との差に対する第1目標ヨーレートω1に応じた5〜20%の補正値ωm1を算出し、該補正値ωm1に対するステアリング角速度δ’に応じた20〜100%の補正値ωm2を算出して第2目標ヨーレートω2に加算し補正した。更に、該補正した値に低周波フィルタ値Δωf(n)を加算して目標ヨーレートωtとした。
【0045】
次に、車両の挙動制御装置20の動作例を示したフローチャートは、図3における車両状態演算部8を車両状態演算部21に置き換えることと、ステップS2の目標ヨーレートωtの算出方法が異なる以外は、図3と同じであるので省略し、車両状態演算部21による目標ヨーレートωtの算出動作例を図6のフローチャートを用いて説明する。なお、図6では、車両状態演算部8を車両状態演算部21に置き換える以外、同じ処理を行うフローは同じ符号で示しており、ここではその説明を省略すると共に図4との相違点のみ説明する。また、特に明記しない限り、図6で行われる処理はすべて車両状態演算部21で行われるものである。
【0046】
図6における図4との相違点は、図4のステップS13をステップS21に、図4のステップS14をステップS22に置き換えたことにある。
図6において、図4のステップS11の処理を行った後、図4のステップS12で、第2目標ヨーレートω2の絶対値が第1目標ヨーレートω1の絶対値よりも小さい場合(YES)、ステップS21に進む。
【0047】
ステップS21で、上記(7)式を用いて補正値ωm2を算出した後、ステップS22で、上記(8)式のように、第2目標ヨーレートω2に補正値ωm2を加算して第3目標ヨーレートω3を算出する。この後、図4のステップS15及びステップS16の処理を行って本フローは終了し、図3のステップS3に進んで図3のステップS3以降の処理を行う。また、ステップS12で、第2目標ヨーレートω2の絶対値よりも第1目標ヨーレートω1の絶対値の方が小さい場合(NO)、図4のステップS17の処理を行った後、図4のステップS15及びステップS16の処理を行って本フローは終了し、図3のステップS3に進んで図3のステップS3以降の処理を行う。
【0048】
このように、本実施の形態2における車両の挙動制御装置は、実施の形態1で算出した補正値ωm1を、更にステアリング角速度δ’に応じて補正した補正値ωm2を算出し、該算出した補正値ωm2を第2目標ヨーレートω2に加算して補正した。このことから、操舵追従性の低下を更に防止することができると共に、目標ヨーレートωtが過大となって走行安定性が低下することを防止できる。更に、実施の形態1と同様、第2目標ヨーレートω2に低周波フィルタ値を加算することによって、実施の形態1と同様の効果を得ることができる。
【0049】
【発明の効果】
上記の説明から明らかなように、本発明の車両の挙動制御装置によれば、ステアリング舵角を用いて算出される第1目標ヨーレートの絶対値よりも横方向の加減速度を用いて算出される第2目標ヨーレートの絶対値の方が小さく、第2目標ヨーレートを用いて目標ヨーレートを算出する場合、第1目標ヨーレートと第2目標ヨーレートとの差に応じた第1補正値を加算して補正した。このことから、路面の状態に応じて目標ヨーレートを制限することができると共に、操舵追従性の低下を防止することができる。
【0050】
また、上記第1補正値を、更にステアリング角速度に応じて補正した第2補正値を算出し、上記第1補正値に代えて該算出した第2補正値を第2目標ヨーレートに加算して補正した。このことから、路面の状態に応じて目標ヨーレートを制限することができると共に、操舵追従性の低下を更に防止することができる。
【0051】
更に、算出した目標ヨーレートとヨーレートセンサから得られるヨーレートとの偏差に、所定の時定数で追従する低周波フィルタ処理を施した、偏差フィルタ値を算出し、算出した目標ヨーレートに該偏差フィルタ値を加算して補正するようにした。このことから、センサのドリフトや路面の傾きによるセンサ値の誤差を偏差フィルタで補正しており、センサ値の誤差による目標ヨーレートとヨーレートセンサから得られるヨーレートとの疑似偏差で、車両の挙動制御が過剰又は過小になることを防止できる。
【図面の簡単な説明】
【図1】 本発明の実施の形態1における車両の挙動制御装置の例を示した概略のブロック図である。
【図2】 関数g(ω1)の例を示した図である。
【図3】 図1で示した車両の挙動制御装置1の動作例を示したフローチャートである。
【図4】 図3における目標ヨーレートωtの算出ルーチンを示したフローチャートである。
【図5】 関数h(δ’)の例を示した図である。
【図6】 本発明の実施の形態2における車両の挙動制御装置の目標ヨーレートωt算出ルーチンを示したフローチャートである。
【符号の説明】
1,20 車両の挙動制御装置
2 車輪速センサ
3 舵角センサ
4 ヨーレートセンサ
6 スロットルセンサ
7 横加速度センサ
8,21 車両状態演算部
9 制動力演算部
10 駆動力演算部
11 ブレーキアクチュエータ
12 スロットルアクチュエータ
Claims (3)
- 各種センサから得られるデータを基にして算出される目標ヨーレートとヨーレートセンサから得られる車両のヨーレートとの偏差から、車両状態の判定を行い、該判定に応じて所定の制動力制御及び駆動力制御を行って車両の挙動制御を行う挙動制御装置において、
ステアリングの操舵角を検出する舵角センサから得られたステアリング舵角を用いて第1目標ヨーレートを算出する第1目標ヨーレート算出手段と、
車両の横方向の加減速度を検出する横加速度センサから得られた横加減速度を用いて第2目標ヨーレートを算出する第2目標ヨーレート算出手段と、
上記第1目標ヨーレートと第2目標ヨーレートとを比較し、絶対値の小さい方を目標ヨーレートとする目標ヨーレート算出手段とを備え、
該目標ヨーレート算出手段は、第2目標ヨーレートを目標ヨーレートとする際、第1目標ヨーレートと第2目標ヨーレートとの差に応じた第1補正値を第2目標ヨーレートに加算して補正することを特徴とする車両の挙動制御装置。 - 上記目標ヨーレート算出手段は、第2目標ヨーレートを用いて目標ヨーレートを算出する際、上記第1補正値をステアリング舵角の角速度に応じて補正した第2補正値を、上記第1補正値に代えて第2目標ヨーレートに加算して補正することを特徴とする請求項1に記載の車両の挙動制御装置。
- 上記目標ヨーレート算出手段は、算出した目標ヨーレートとヨーレートセンサから得られるヨーレートとの偏差に、所定の時定数で追従する低周波フィルタ処理を施した、偏差フィルタ値を算出し、算出した目標ヨーレートに該偏差フィルタ値を加算して補正することを特徴とする請求項1又は請求項2のいずれかに記載の車両の挙動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP24701398A JP3662747B2 (ja) | 1998-09-01 | 1998-09-01 | 車両の挙動制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP24701398A JP3662747B2 (ja) | 1998-09-01 | 1998-09-01 | 車両の挙動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000071961A JP2000071961A (ja) | 2000-03-07 |
| JP3662747B2 true JP3662747B2 (ja) | 2005-06-22 |
Family
ID=17157105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP24701398A Expired - Fee Related JP3662747B2 (ja) | 1998-09-01 | 1998-09-01 | 車両の挙動制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3662747B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5436069B2 (ja) * | 2009-06-24 | 2014-03-05 | 本田技研工業株式会社 | 車両挙動制御装置 |
| WO2011108688A1 (ja) | 2010-03-04 | 2011-09-09 | 本田技研工業株式会社 | 車両の旋回制御装置 |
| CN102753409B (zh) * | 2010-03-04 | 2015-05-06 | 本田技研工业株式会社 | 车辆的转弯控制装置 |
| EP2543563B1 (en) * | 2010-03-04 | 2018-01-10 | Honda Motor Co., Ltd. | Turning control device for vehicle |
| WO2011108697A1 (ja) * | 2010-03-04 | 2011-09-09 | 本田技研工業株式会社 | 車両の旋回制御装置 |
| JP7247992B2 (ja) * | 2020-08-28 | 2023-03-29 | トヨタ自動車株式会社 | 車両の制御装置 |
| CN114030526B (zh) * | 2021-12-16 | 2022-11-15 | 中国科学院电工研究所 | 一种车辆主动转向控制方法及系统 |
-
1998
- 1998-09-01 JP JP24701398A patent/JP3662747B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000071961A (ja) | 2000-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5011866B2 (ja) | 横すべり角推定装置、自動車、及び横すべり角推定方法 | |
| JPS62137276A (ja) | 車両用操舵系制御装置 | |
| JP2003306092A (ja) | 車両状態量の推定方法 | |
| JP5700116B2 (ja) | 車両の駆動力制御装置 | |
| JPH06229270A (ja) | 車両のスリップ制御装置 | |
| JP2600386B2 (ja) | 後輪操舵制御装置 | |
| US20030060959A1 (en) | Integration of rear wheel steering with vehicle stability enhancement system | |
| JP3662747B2 (ja) | 車両の挙動制御装置 | |
| JPH0419509A (ja) | 検出値オフセット量除去装置 | |
| JP3703635B2 (ja) | 車両の挙動制御装置 | |
| US20050046274A1 (en) | Vehicle wheel speed estimation device, vehicle body speed estimation device and vehicle behavior control apparatus | |
| JPH08119130A (ja) | 四輪操舵車の後輪操舵角制御装置 | |
| JPH06207951A (ja) | ヨーレートセンサの異常検出装置 | |
| JP3773361B2 (ja) | 車両の挙動制御装置 | |
| JPH1151668A (ja) | 角速度検出装置 | |
| JP2000346869A (ja) | 車両挙動検出装置および車両挙動制御装置 | |
| JPH05278624A (ja) | 車両旋回状態推定装置 | |
| JP2000344075A (ja) | 車両挙動制御装置 | |
| JPH06107197A (ja) | 車両の操舵装置 | |
| JP3752858B2 (ja) | 車両の挙動制御装置 | |
| JP3747623B2 (ja) | 車両の挙動制御装置 | |
| JPH1178933A (ja) | 車両の車体横滑り角推定方法及び推定装置 | |
| JP3686519B2 (ja) | 車両の挙動制御装置 | |
| JP3686521B2 (ja) | 車両の挙動制御装置 | |
| JP3775127B2 (ja) | 車両運動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040831 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20041021 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050324 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080401 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080401 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100401 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140401 Year of fee payment: 9 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |