CN113545734A - Magnetic control dual-drive medicine applying capsule robot - Google Patents
Magnetic control dual-drive medicine applying capsule robot Download PDFInfo
- Publication number
- CN113545734A CN113545734A CN202111015525.9A CN202111015525A CN113545734A CN 113545734 A CN113545734 A CN 113545734A CN 202111015525 A CN202111015525 A CN 202111015525A CN 113545734 A CN113545734 A CN 113545734A
- Authority
- CN
- China
- Prior art keywords
- capsule
- drug delivery
- shell
- drug
- micro
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000002775 capsule Substances 0.000 title claims abstract description 84
- 239000003814 drug Substances 0.000 title claims abstract description 63
- 229940079593 drug Drugs 0.000 claims abstract description 47
- 238000007906 compression Methods 0.000 claims abstract description 40
- 230000006835 compression Effects 0.000 claims abstract description 39
- 238000012377 drug delivery Methods 0.000 claims abstract description 22
- 239000000463 material Substances 0.000 claims abstract description 18
- 210000001124 body fluid Anatomy 0.000 claims description 14
- 239000010839 body fluid Substances 0.000 claims description 14
- 238000001514 detection method Methods 0.000 claims description 5
- IXPNQXFRVYWDDI-UHFFFAOYSA-N 1-methyl-2,4-dioxo-1,3-diazinane-5-carboximidamide Chemical compound CN1CC(C(N)=N)C(=O)NC1=O IXPNQXFRVYWDDI-UHFFFAOYSA-N 0.000 claims description 4
- 108010010803 Gelatin Proteins 0.000 claims description 4
- 229920002472 Starch Polymers 0.000 claims description 4
- 239000004205 dimethyl polysiloxane Substances 0.000 claims description 4
- 235000013870 dimethyl polysiloxane Nutrition 0.000 claims description 4
- 229920000159 gelatin Polymers 0.000 claims description 4
- 239000008273 gelatin Substances 0.000 claims description 4
- 235000019322 gelatine Nutrition 0.000 claims description 4
- 235000011852 gelatine desserts Nutrition 0.000 claims description 4
- CXQXSVUQTKDNFP-UHFFFAOYSA-N octamethyltrisiloxane Chemical compound C[Si](C)(C)O[Si](C)(C)O[Si](C)(C)C CXQXSVUQTKDNFP-UHFFFAOYSA-N 0.000 claims description 4
- 238000004987 plasma desorption mass spectroscopy Methods 0.000 claims description 4
- 229920000435 poly(dimethylsiloxane) Polymers 0.000 claims description 4
- 235000010413 sodium alginate Nutrition 0.000 claims description 4
- 229940005550 sodium alginate Drugs 0.000 claims description 4
- 239000000661 sodium alginate Substances 0.000 claims description 4
- 235000019698 starch Nutrition 0.000 claims description 4
- 239000008107 starch Substances 0.000 claims description 4
- 230000009977 dual effect Effects 0.000 claims 9
- 239000000758 substrate Substances 0.000 claims 6
- 239000000575 pesticide Substances 0.000 claims 3
- 239000000839 emulsion Substances 0.000 claims 1
- 238000004090 dissolution Methods 0.000 abstract description 7
- 239000007788 liquid Substances 0.000 abstract description 2
- 238000005507 spraying Methods 0.000 description 18
- 238000000034 method Methods 0.000 description 11
- 230000008569 process Effects 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000006378 damage Effects 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000003094 microcapsule Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 239000003153 chemical reaction reagent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 238000001839 endoscopy Methods 0.000 description 1
- 230000002496 gastric effect Effects 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 239000004816 latex Substances 0.000 description 1
- 229920000126 latex Polymers 0.000 description 1
- 239000012528 membrane Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 231100000252 nontoxic Toxicity 0.000 description 1
- 230000003000 nontoxic effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- 229920006255 plastic film Polymers 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000007711 solidification Methods 0.000 description 1
- 230000008023 solidification Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 229940126585 therapeutic drug Drugs 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M31/00—Devices for introducing or retaining media, e.g. remedies, in cavities of the body
- A61M31/002—Devices for releasing a drug at a continuous and controlled rate for a prolonged period of time
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M31/00—Devices for introducing or retaining media, e.g. remedies, in cavities of the body
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Optics & Photonics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Chemical & Material Sciences (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Medicinal Chemistry (AREA)
- Endoscopes (AREA)
- Medical Preparation Storing Or Oral Administration Devices (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
本发明公开了一种磁控双驱动施药胶囊机器人,包括胶囊壳体和安装在胶囊壳体内的磁驱装置、内窥镜装置及施药装置;所述施药装置包括施药微针、两个触发柱、两个固化压缩弹簧、两个导向筒和设于胶囊壳体外的施药窗口;两个触发柱一端与施药微针的基底抵靠或者相连,另一端分别安装在两个导向筒内,每个导向筒中均设有一个固化压缩弹簧,筒壁上设有溶解孔,液体通过溶解孔进入导向筒内,将固化材料溶解,从而释放压缩弹簧,压缩弹簧将施药微针顶出进行施药;本发明所提供的磁控胶囊不仅具有内窥镜的功能,而且增加了定点施药的功能;医生通过磁控胶囊控制胶囊运动,通过内窥镜观察内部情况,定点顶出微针实施功能,以此开展定点施药的治疗工作。
The invention discloses a magnetically controlled dual-drive medicine-dispensing capsule robot, comprising a capsule shell, a magnetic drive device, an endoscope device and a medicine-dispensing device installed in the capsule casing; the medicine-dispensing device comprises medicine-dispensing microneedles, Two trigger columns, two curing compression springs, two guide cylinders and a drug application window provided outside the capsule shell; one end of the two trigger columns abuts or is connected to the base of the drug dispensing microneedle, and the other ends are respectively installed on the two trigger columns. In the guide cylinder, each guide cylinder is provided with a curing compression spring, and the wall of the cylinder is provided with a dissolution hole. The liquid enters the guide cylinder through the dissolution hole to dissolve the curing material, thereby releasing the compression spring, and the compression spring will apply the microneedle. The magnetic control capsule provided by the present invention not only has the function of an endoscope, but also increases the function of fixed-point application; the doctor controls the movement of the capsule through the magnetic control capsule, observes the internal situation through the endoscope, and fixes the top of the capsule. Micro-needle implementation function, in order to carry out the treatment of fixed-point drug delivery.
Description
技术领域technical field
本发明属于医疗机器人领域,涉及一种微型医疗机器人的施药技术,具体涉及一种磁控双驱动施药胶囊机器人。The invention belongs to the field of medical robots, relates to a medicine application technology of a micro medical robot, and in particular relates to a magnetic control dual-drive medicine application capsule robot.
背景技术Background technique
微型机器人有关技术正飞速发展,其应用范围正持续扩大,应用程度也不断深入,目前,微型机器人在医疗领域发挥的作用正日益显著。医疗领域中,一直以来采用的传统人工内窥镜方法进行检测时,如果内窥镜在患者胃肠道中移动的幅度较大,则患者身体会对仪器反应出不适感,有时仪器甚至会存在对患者身体造成损伤的可能,因此使其更适合患者的身体是极其重要的;倘若角度控制得太小,则可能会使得图像质量下降,甚至可能会无法获得所需区域的影像;同时同时传统人工内窥镜工作效率低,医生的治疗、施药难度高,种种缺点使得医疗机构开始渐渐开始考虑使用磁控胶囊机器人取代人工进行图像获取、施药。因此十分有必要研发出现体积足够小、对患者身体不会造成过大负担的微型医疗机器人,部分医疗机构将微型胶囊机器人放入人体内进行检测、治疗,微型胶囊机器人体积小,病人的异物感小。目前在微型医疗机器人领域,科学家正致力于开发检测和轻伤的治疗技术。现如今生活中的内窥镜胶囊机器人已经可以实现普通胃肠镜的检测功能,却还无法实现在指定部位施药的功能,微型医疗机器人领域此后会更好地开发具有定点施药功能的内窥镜胶囊机器人。The technology related to micro-robots is developing rapidly, and its application scope is continuously expanding, and the application degree is also deepening. At present, the role of micro-robots in the medical field is becoming increasingly significant. In the medical field, when the traditional artificial endoscope method has been used for testing, if the endoscope moves in the patient's gastrointestinal tract to a large extent, the patient's body will react to the instrument with discomfort, and sometimes the instrument may even have a negative effect. The possibility of damage to the patient's body, so it is extremely important to make it more suitable for the patient's body; if the angle is controlled too small, the image quality may be degraded, and the desired area may not be obtained. Due to the low working efficiency of endoscopes and the high difficulty for doctors to treat and apply medicines, medical institutions have gradually begun to consider using magnetic-controlled capsule robots to replace manual image acquisition and medicine application. Therefore, it is very necessary to develop micro-medical robots that are small enough in size and will not cause too much burden on the patient's body. Some medical institutions put micro-capsule robots into the human body for detection and treatment. Small. In the field of tiny medical robots, scientists are currently working to develop technologies for detection and treatment of minor injuries. Nowadays, the endoscopic capsule robot in life can realize the detection function of ordinary gastrointestinal endoscopy, but it has not been able to realize the function of dispensing medicine in designated parts. Speculum capsule robot.
发明内容SUMMARY OF THE INVENTION
鉴于上述现有技术的不足,本发明的目的在于一种磁控双驱动施药胶囊机器人,具有在目标位置定点施药的功能,使得胶囊机器人不仅能完成内窥镜的功能,而且能完成进一步的诊断及定点治疗任务。In view of the above-mentioned deficiencies of the prior art, the purpose of the present invention is a magnetically controlled dual-drive drug-dispensing capsule robot, which has the function of fixed-point dispensing at a target position, so that the capsule robot can not only complete the function of an endoscope, but also further diagnosis and fixed-point treatment tasks.
为了解决上述技术问题,本发明采用的技术方案是:In order to solve the above-mentioned technical problems, the technical scheme adopted in the present invention is:
一种磁控双驱动施药胶囊机器人,其特征在于:包括胶囊壳体和安装在胶囊壳体内的磁驱装置、内窥镜装置及施药装置;其中,A magnetically controlled dual-drive medicine-dispensing capsule robot is characterized by comprising a capsule shell, a magnetic drive device, an endoscope device and a medicine-dispensing device installed in the capsule shell; wherein,
所述磁驱装置用于配合外界磁场驱动整个施药胶囊运动;The magnetic drive device is used to cooperate with the external magnetic field to drive the movement of the entire medicine dispensing capsule;
所述内窥镜装置用于对进行检测和施药环境观测;The endoscope device is used for inspection and drug application environment observation;
所述施药装置包括施药微针、触发柱、固化压缩弹簧、设于胶囊壳体内的导向筒和设于胶囊壳体外的施药窗口;The drug application device includes drug application micro-needles, trigger columns, curing compression springs, guide cylinders provided in the capsule shell, and drug application windows provided outside the capsule shell;
所述施药微针位于施药窗口内,施药微针包括基底和设于基底上的微针阵列,所述施药窗口外侧还设有一层将施药微针保护起来的薄膜;The spraying microneedles are located in the spraying window, the spraying microneedles include a base and a microneedle array arranged on the base, and a layer of film to protect the spraying microneedles is provided outside the spraying window;
所述导向筒有两个,两个导向筒设于与施药窗口相对一侧的胶囊壳体内壁上,所述触发柱有两个,两个触发柱一端与施药微针的基底抵靠或者相连,另一端分别安装在两个导向筒内,两个触发柱中部通过连接板横向相连;所述固化压缩弹簧有两个,分别安装在两个导向筒内,且位于相应触发柱的端部和导向筒内底部之间;There are two guide cylinders, the two guide cylinders are arranged on the inner wall of the capsule shell on the opposite side of the drug application window, there are two trigger columns, and one end of the two trigger columns abuts against the base of the drug application microneedle Or connected, the other ends are installed in the two guide cylinders respectively, and the middle parts of the two trigger columns are connected horizontally through the connecting plate; there are two solidified compression springs, which are respectively installed in the two guide cylinders and located at the ends of the corresponding trigger columns. between the inner bottom of the guide cylinder and the inner bottom of the guide cylinder;
所述固化压缩弹簧为通过可溶于体液的固化材料固化的压缩弹簧,安装固化压缩弹簧区域的导向筒侧壁设有与胶囊壳体外界相通的溶解孔,当施药胶囊处于人体使用环境时,体液通过溶解孔进入导向筒内将固化压缩弹簧的可溶于体液的固化材料融化,压缩弹簧释放,通过触发柱驱动施药微针向外伸出,刺破薄膜后与人体接触,进行微针施药。The curing compression spring is a compression spring that is cured by a curing material soluble in body fluids. The side wall of the guide cylinder in the region where the curing compression spring is installed is provided with a dissolving hole that communicates with the outside of the capsule shell. , the body fluid enters the guide cylinder through the dissolution hole to melt the solidified material soluble in body fluids that solidifies the compression spring, the compression spring is released, and the micro-needles are driven by the trigger column to protrude outwards. Needle application.
进一步地,所述胶囊壳体为由承载壳体和施药壳体组合形成的圆柱形壳体,所述导向筒设置于承载壳体内壁,所述施药窗口设置于施药壳体外部。Further, the capsule shell is a cylindrical shell formed by a combination of a bearing shell and an application shell, the guide cylinder is arranged on the inner wall of the bearing shell, and the medicine application window is arranged outside the medicine application shell.
进一步地,所述内窥镜装置包括内窥镜镜头、镜片以及电路板,其中所述内窥镜镜头设于胶囊壳体前进方向的前端。Further, the endoscope device includes an endoscope lens, a lens and a circuit board, wherein the endoscope lens is arranged at the front end of the capsule housing in the forward direction.
进一步地,所述可溶于体液的固化材料包括明胶、淀粉和海藻酸钠中的任意一种或几种。Further, the body fluid-soluble solidifying material includes any one or more of gelatin, starch and sodium alginate.
进一步地,设于施药窗口的薄膜为乳胶膜或者生物薄膜,所述薄膜还可以为无毒的塑料膜、橡胶膜等等。Further, the film disposed on the drug application window is a latex film or a biological film, and the film can also be a non-toxic plastic film, a rubber film, or the like.
进一步地,所述施药微针是使用PDMS模具制造的微针阵列补丁,微针中含有所需药物。Further, the drug-applying microneedle is a microneedle array patch manufactured by using a PDMS mold, and the microneedle contains the desired drug.
进一步地,所述微针为圆锥状,每个微针底面直径为200-400μm。Further, the microneedles are conical, and the diameter of the bottom surface of each microneedle is 200-400 μm.
进一步地,两个导向筒平行设置,所述微针阵列的基底为弧形基底,每个微针均与弧形基底表面垂直。Further, two guide cylinders are arranged in parallel, the base of the microneedle array is an arc base, and each microneedle is perpendicular to the surface of the arc base.
进一步地,所述磁驱装置为设于胶囊壳体内同轴设置的环形永磁铁。Further, the magnetic drive device is a ring-shaped permanent magnet arranged coaxially in the capsule shell.
进一步地,所述导向筒设置与胶囊壳体尾部,且胶囊壳体尾部设置为便于体液进入溶解孔的开放式端口。Further, the guide cylinder is arranged with the tail of the capsule shell, and the tail of the capsule shell is arranged as an open port for the body fluid to enter the dissolution hole.
进一步地,所述微针是使用PDMS模具制造的微针阵列补丁的过程制成,针中含有药物,基底不含有药物,所述微针为圆锥状,每个微针底面直径仅为300μm左右。Further, the microneedles are made by the process of using a microneedle array patch manufactured by a PDMS mold. The needles contain drugs and the base does not contain drugs. The microneedles are conical, and the diameter of the bottom surface of each microneedle is only about 300 μm. .
进一步地,所述承载壳体内安装有所述磁体,使得施药过程中,所述的磁控双驱动施药胶囊机器人可以通过磁控引导运动到指定的施药区。Further, the magnet is installed in the carrying shell, so that during the drug application process, the magnetic control dual-drive drug application capsule robot can be guided to move to the designated drug application area by the magnetic control.
进一步地,所述内窥镜镜片位于相对于施药装置的另一侧顶部,所述内窥镜装置通过无线与外界通信及数据传输。Further, the endoscope lens is located on the top of the other side relative to the drug application device, and the endoscope device communicates with the outside world and transmits data through wireless.
进一步地,所述承载壳体与所述施药壳体之间通过倒扣与扣钩相互作用,牢固结合。Further, the bearing shell and the drug application shell are firmly combined through the interaction of undercuts and clasps.
进一步地,所述内窥镜及所述内窥镜电路板均采用柔性线控制,该柔性线同时还作为磁控胶囊的牵引线。Further, both the endoscope and the endoscope circuit board are controlled by a flexible wire, and the flexible wire also serves as a pulling wire of the magnetron capsule.
进一步地,所述胶囊壳体整体为柱体结构,轴向剖切面为椭圆形。Further, the capsule shell has a cylindrical structure as a whole, and the axial section is elliptical.
本发明的有益效果是:The beneficial effects of the present invention are:
1、采用微型电路板控制,占用空间小、结构更紧凑,胶囊系统稳定性强;1. It is controlled by a micro circuit board, which occupies less space, has a more compact structure, and has strong stability of the capsule system;
2、本发明结构简单,机构动力传动效率高,没有引入复杂的机械结构,动作运行成功率较高。2. The present invention has the advantages of simple structure, high mechanism power transmission efficiency, no introduction of complex mechanical structure, and high operation success rate.
2、胶囊机器人尾部线控能提供充足能量,可长时间多次在体内执行任务;2. The tail wire control of the capsule robot can provide sufficient energy and can perform tasks in the body for many times for a long time;
3、能额外满足胶囊机器人施药功能要求。3. It can additionally meet the functional requirements of the capsule robot.
4、本发明通过设置两个触发柱和两个导向筒使得固化压缩弹簧被释放后,能根据均匀的对施药微针施加推力,从而使得施药均匀,防止施药微针顶歪,导致部分微针接触到人体组织,而部分微针没有接触,降低施药效果。4. In the present invention, by setting two trigger columns and two guide cylinders, after the curing compression spring is released, it can apply a pushing force to the spraying microneedle uniformly, so as to make the spraying uniform and prevent the tip of the spraying microneedle from being crooked, resulting in Some of the microneedles are in contact with human tissue, while some of the microneedles do not, which reduces the effect of drug delivery.
附图说明Description of drawings
图1是本发明磁控双驱动施药胶囊机器人外部结构示意图。FIG. 1 is a schematic diagram of the external structure of the magnetically controlled dual-drive medicine-dispensing capsule robot of the present invention.
图2是本发明磁控双驱动施药胶囊机器人去掉施药窗口上的薄膜示意图。Fig. 2 is a schematic diagram of the magnetic control dual-drive drug applicator capsule robot of the present invention removing the film on the drug applicator window.
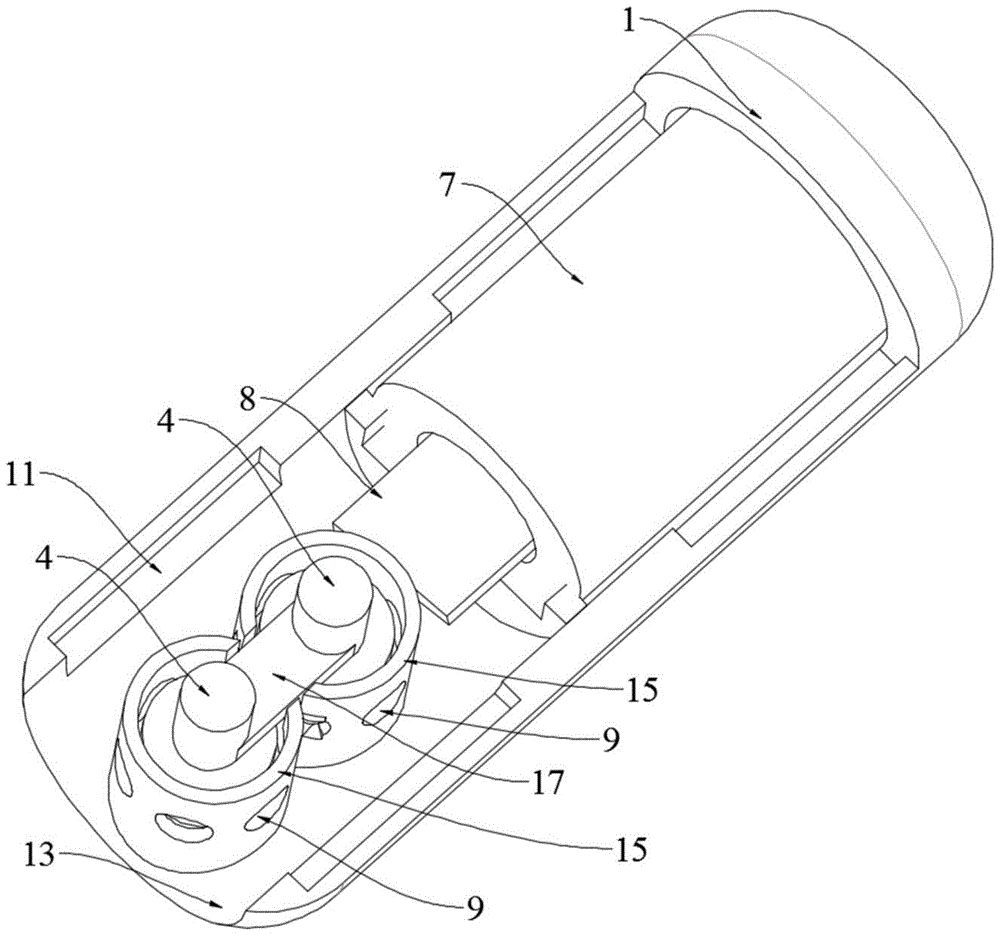
图3是本发明磁控双驱动施药胶囊机器人去掉施药壳体以及微针内部结构示意图。Fig. 3 is a schematic diagram showing the inner structure of the magnetic control dual-drive drug-applying capsule robot of the present invention to remove the drug-applying shell and the micro-needle.
图4是本发明弹簧压缩状态下内部结构剖视图。FIG. 4 is a cross-sectional view of the internal structure of the spring in the compressed state of the present invention.
图5是本发明弹簧复位状态下施药装置放大示意图。Fig. 5 is an enlarged schematic view of the applicator in the spring reset state of the present invention.
图6是图中5中A-A剖视图。FIG. 6 is a cross-sectional view taken along line A-A of FIG. 5 .
其中,1-承载壳体,2-施药壳体,3-施药微针,31-微针,32-基底,4-触发柱,5-压缩弹簧,6-内窥镜镜片,7-环形永磁铁,8-内窥镜电路板,9-溶解孔,10-扣钩,11-倒扣,12-固化材料,13-开放式端口,14-薄膜,15-导向筒,16-施药窗口,17-连接板。Among them, 1-bearing housing, 2-applying housing, 3-applying microneedle, 31-microneedle, 32-base, 4-triggering post, 5-compression spring, 6-endoscope lens, 7- Ring Permanent Magnet, 8-Endoscope Circuit Board, 9-Dissolving Hole, 10-Hook, 11-Invert, 12-Cure Material, 13-Open Port, 14-Film, 15-Guide Barrel, 16-Apply Medicine window, 17-connection board.
具体实施方式Detailed ways
下面结合附图和实施例来对本发明提供的一种磁控双驱动施药胶囊机器人进行详细说明,所述是对本发明的解释而不是限定。The following is a detailed description of a magnetically controlled dual-drive medicine-dispensing capsule robot provided by the present invention in conjunction with the accompanying drawings and embodiments, which are to explain rather than limit the present invention.
如图1至图6所示,一种磁控双驱动施药胶囊机器人,包括胶囊壳体和安装在胶囊壳体内的磁驱装置、内窥镜装置及施药装置;其中,为了便于制造和组装,所述胶囊壳体为由承载壳体1和施药壳体2组合形成的圆柱形壳体,承载壳体1和施药壳体2之间通过扣钩10和倒扣11可拆卸相连。As shown in Figures 1 to 6, a magnetically controlled dual-drive medicine-dispensing capsule robot includes a capsule housing and a magnetic drive device, an endoscope device and a medicine-dispensing device installed in the capsule housing; wherein, in order to facilitate manufacturing and Assembled, the capsule shell is a cylindrical shell formed by the combination of the bearing
所述磁驱装置用于配合外界磁场驱动整个施药胶囊运动;The magnetic drive device is used to cooperate with the external magnetic field to drive the movement of the entire medicine dispensing capsule;
所述内窥镜装置用于对进行检测和施药环境观测;The endoscope device is used for inspection and drug application environment observation;
所述施药装置包括施药微针3、触发柱4、固化压缩弹簧、设于胶囊壳体内的导向筒15和设于胶囊壳体外的施药窗口16;The spraying device includes spraying
所述施药微针3位于施药窗口16内,施药微针3包括基底32和设于基底32上的由微针31组成的微针阵列,所述施药窗口16外侧还设有一层将施药微针3保护起来的薄膜14;The spraying
所述导向筒15有两个,两个导向筒15设于与施药窗口16相对一侧的胶囊壳体内壁上,所述触发柱4有两个,两个触发柱4一端与施药微针3的基底32抵靠或者相连,另一端分别安装在两个导向筒15内,两个触发柱4中部通过连接板17横向相连;所述固化压缩弹簧有两个,分别安装在两个导向筒15内,且位于相应触发柱4的端部和导向筒15内底部之间;There are two
所述固化压缩弹簧为通过可溶于体液的固化材料12固化的压缩弹簧5,安装固化压缩弹簧区域的导向筒15侧壁设有与胶囊壳体外界相通的溶解孔9,当施药胶囊处于人体使用环境时,体液通过溶解孔9进入导向筒15内将固化压缩弹簧的可溶于体液的固化材料12融化,压缩弹簧5释放,通过触发柱4驱动施药微针3向外伸出,刺破薄膜14后与人体接触,进行微针31施药。The curing compression spring is a
如图4和图5所示,借助可溶解的固化压缩弹簧控制触发柱4弹出微针31实现穿刺施药。所述固化压缩弹簧为通过可溶于体液的固化材料12固化的压缩弹簧5,具体的制造方式为:将弹簧压缩后保存压缩状态置于圆柱形模具内,然后往模具中灌注含有包括但不仅限于明胶,淀粉,海藻酸钠等可溶于体液的固化材料12成分的溶液,等溶液风干后,拆模得到固化压缩弹簧。明胶,淀粉,海藻酸钠等成分在特定溶液或人体环境下的溶解,失去对压缩弹簧5的固化作用,弹簧伸展释放,产生施药动力,通过选择材料种类和圆柱形模具大小,使得固化压缩弹簧内固化态的材料在20-30分钟作用能被体液溶解,从而释放压缩弹簧5,选择该时间长度是因为在该时间长度下,足以使得磁控微针31穿刺施药胶囊运动到人体任何可以达到的地方,并且稍作停留达到溶解时间后,压缩弹簧5自行释放,达到自动施药的目的,并且还不用在磁控双驱动施药胶囊机器人设置复杂的动力机构,实际上在微小的胶囊内设置微型电机不仅技术复杂,而且成本高昂,不具有实用性,而本发明通过巧妙结构设计,无需使用超微型电机,即可完成施药,大幅度降低使用和制造成本,当施药完成后取出微胶囊,只需要更换固化压缩弹簧后可以再次使用,达到重复使用的目的,而固化压缩弹簧无论是制造工艺还是材料都是常规材料和工艺,成本低廉,适合大规模推广应用。所述固化压缩弹簧复原方法包括但不仅限于通过溶解孔9流入液体逐步溶解的方式来实现。当胶囊运动到目标位置之后,固化材料12自动进行溶解,无需外界操作,简洁高效。As shown in FIG. 4 and FIG. 5 , puncture and application are realized by controlling the
本发明通过设置两个触发柱4和两个导向筒15使得固化压缩弹簧被释放后,能根据均匀的对施药微针3施加推力,从而使得施药均匀,防止施药微针3顶歪,导致部分微针31接触到人体组织,而部分微针31没有接触,降低施药效果。In the present invention, two
如图3所示,所述承载壳体1内安装有所述环形永磁铁7,使得施药过程中,所述的磁控双驱动施药胶囊机器人可以通过磁控引导运动到指定的施药区进行进一步操作。As shown in FIG. 3 , the ring-shaped
如图3和图4所示,本发明内窥镜电路板8固定在环形永磁铁7内,内窥镜镜片6安装在承载壳体1前端端部,所述内窥镜镜片6及所述内窥镜电路板8均采用柔性线通讯控制,该柔性线同时还作为磁控胶囊机器人的牵引线。As shown in FIG. 3 and FIG. 4 , the
如图2所示,所述施药微针3是使用PDMS模具制造的微针阵列补丁,施药时,针尖表面含有药物,基底32不含有药物,所述微针31为圆锥状,每个微针31底面直径仅为300μm左右。测试施药有效性时,可用荧光试剂代替药物,对猪肠进行试验,观察荧光物质来判断施药的有效性,本发明施药微针3的具体制造工艺可以参考本发明人前期研究成果CN108837299B所公开技术。As shown in FIG. 2 , the
如图4所示,所述内窥镜镜片6位于相对于施药装置的另一侧的胶囊壳体顶部,所述内窥镜装置通过无线与外界通信及数据传输,信息传输方式包含WIFI但不仅限WIFI。As shown in FIG. 4 , the
如图5和图6所示,所述承载壳体1与所述施药壳体2之间通过倒扣11与扣钩10相互卡合相连,以保证能快速拆卸的牢固结合,具体的,承载壳体1上设有两个相对的凹槽,形成两个倒扣11,施药壳体2沿着轴线两侧各设有一个外侧切边的凸起,形成两个扣钩10,两个扣钩10外部之间距离略大于两个倒扣11内侧之间距离,施药壳体2本身具有一定的弹性,安装时,通过外力挤压施药壳体2两侧,使得施药壳体2变形,两个扣钩10外部之间距离小于两个倒扣11内侧之间距离,然后将两个扣钩10安装在两个倒扣11之间,释放外力,两个扣钩10在施药壳体2恢复形变的情况下向两侧伸展,抵靠在两个倒扣11内壁上,从而将承载壳体1与所述施药壳体2牢固的可拆卸固定在一起,拆卸过程完全相反,实际外力挤压施药壳体2使其变形即可,需要注意的是,两个扣钩10所需变形量不大,因此,正常情况下施药壳体2采用塑料或者金属材料制成都能满足要求。As shown in FIG. 5 and FIG. 6 , the bearing
如图2所示,所述胶囊壳体整体为柱体结构,轴向剖切面为椭圆形。As shown in FIG. 2 , the capsule shell has a cylindrical structure as a whole, and the axial section is elliptical.
需要说明的是,本发明内窥镜装置及磁控胶囊其他常规结构并非本发明关键发明点,本发明没有详细公开的部分采用公知常识即可,比如为了配合图像采集装置,承载壳体1前端开设有拍摄孔或者胶囊壳体设置为透明罩。It should be noted that other conventional structures of the endoscope device and the magnetron capsule of the present invention are not the key inventions of the present invention, and common knowledge may be used for the parts that are not disclosed in detail in the present invention. A shooting hole is opened or the capsule shell is set as a transparent cover.
本发明工作原理:The working principle of the present invention:
本发明所述承载壳体1内安装有磁性混合材料制成的环形永磁铁7,能在外部磁场驱动下在人体内移动及调整角度,具体的参照现有技术中的磁控胶囊技术;所述内窥镜装置能够完成图像采集功能,磁控双驱动施药胶囊机器人移动时,施药微针被薄膜覆盖,不会与人体组织接触,在到达指定位置后,只需等待所述固化压缩弹簧在体内或者溶液中,固化材料12逐渐溶解,所述压缩弹簧5复原,从而将所述含有治疗药物的微针31与所述触发柱4顶出,就能完成施药功能。The bearing
本发明中所述的内窥镜装置可全程记录摄录图像视频,当磁控胶囊执行任务完成后医生通过控制线将胶囊从患者体内拉出,以便开展后续的检测治疗工作。The endoscopic device described in the present invention can record and record images and videos in the whole process. When the magnetron capsule performs the task, the doctor pulls the capsule out of the patient through the control line, so as to carry out the subsequent detection and treatment work.
以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。The above embodiments are only used to illustrate the present invention, but not to limit the present invention. Although the present invention has been described in detail with reference to the embodiments, those of ordinary skill in the art should understand that various combinations, modifications or equivalent replacements to the technical solutions of the present invention do not depart from the spirit and scope of the technical solutions of the present invention, and should cover within the scope of the claims of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111015525.9A CN113545734B (en) | 2021-08-31 | 2021-08-31 | Magnetic control dual-drive medicine applying capsule robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111015525.9A CN113545734B (en) | 2021-08-31 | 2021-08-31 | Magnetic control dual-drive medicine applying capsule robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113545734A true CN113545734A (en) | 2021-10-26 |
| CN113545734B CN113545734B (en) | 2022-06-07 |
Family
ID=78106325
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111015525.9A Active CN113545734B (en) | 2021-08-31 | 2021-08-31 | Magnetic control dual-drive medicine applying capsule robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113545734B (en) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4239040A (en) * | 1976-10-19 | 1980-12-16 | Kabushiki Kaisha Daini Seikosha | Capsule for medical use |
| US5217449A (en) * | 1990-12-11 | 1993-06-08 | Miyarisan Kabushiki Kaisha | Medical capsule and apparatus for activating the same |
| CN1600279A (en) * | 2004-09-29 | 2005-03-30 | 重庆大学 | A fixed-point release device for digestive tract drugs |
| CN100998904A (en) * | 2006-12-19 | 2007-07-18 | 重庆大学 | Slow-release remote control electronic capsule |
| CN101259301A (en) * | 2008-04-18 | 2008-09-10 | 重庆大学 | Digital Pulse Release Electronic Capsule |
| US20090095608A1 (en) * | 2007-10-12 | 2009-04-16 | Hoya Corporation | Switching mechanism for swallowable medical device |
| CN105963855A (en) * | 2016-06-22 | 2016-09-28 | 成都市亿泰科技有限公司 | Microneedle drug delivery patch containing separable drug capsule |
| CN106474618A (en) * | 2015-09-01 | 2017-03-08 | 山东大学苏州研究院 | A kind of microrobot capsule |
| CN109330627A (en) * | 2018-10-09 | 2019-02-15 | 安翰光电技术(武汉)有限公司 | The capsule system for sampling and releasing the drug can either synchronously or asynchronously be completed |
| US20190298318A1 (en) * | 2016-06-07 | 2019-10-03 | Universite Grenoble Alpes | Device for taking an intestinal sample |
-
2021
- 2021-08-31 CN CN202111015525.9A patent/CN113545734B/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4239040A (en) * | 1976-10-19 | 1980-12-16 | Kabushiki Kaisha Daini Seikosha | Capsule for medical use |
| US5217449A (en) * | 1990-12-11 | 1993-06-08 | Miyarisan Kabushiki Kaisha | Medical capsule and apparatus for activating the same |
| CN1600279A (en) * | 2004-09-29 | 2005-03-30 | 重庆大学 | A fixed-point release device for digestive tract drugs |
| CN100998904A (en) * | 2006-12-19 | 2007-07-18 | 重庆大学 | Slow-release remote control electronic capsule |
| US20090095608A1 (en) * | 2007-10-12 | 2009-04-16 | Hoya Corporation | Switching mechanism for swallowable medical device |
| CN101259301A (en) * | 2008-04-18 | 2008-09-10 | 重庆大学 | Digital Pulse Release Electronic Capsule |
| CN106474618A (en) * | 2015-09-01 | 2017-03-08 | 山东大学苏州研究院 | A kind of microrobot capsule |
| US20190298318A1 (en) * | 2016-06-07 | 2019-10-03 | Universite Grenoble Alpes | Device for taking an intestinal sample |
| CN105963855A (en) * | 2016-06-22 | 2016-09-28 | 成都市亿泰科技有限公司 | Microneedle drug delivery patch containing separable drug capsule |
| CN109330627A (en) * | 2018-10-09 | 2019-02-15 | 安翰光电技术(武汉)有限公司 | The capsule system for sampling and releasing the drug can either synchronously or asynchronously be completed |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113545734B (en) | 2022-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113576373B (en) | Magnetic control micro-needle puncture medicine application capsule | |
| EP2351511B1 (en) | Capsule medical apparatus | |
| WO2010137705A1 (en) | Capsule type medical device | |
| US9149172B2 (en) | System and apparatus for anchoring and operation of in-vivo medical devices | |
| CN105877685A (en) | Endoscopic Capsules and Endoscopic Systems | |
| JP2003325438A (en) | Capsule type medical treatment device | |
| JP5203050B2 (en) | Capsule medical device | |
| US12194264B2 (en) | Magnetomechanic triggering of payload release from miniaturized devices | |
| US8439851B2 (en) | Lumen passability checking device, lumen passability checking method, and method of manufacturing lumen passability checking device | |
| CN113545734B (en) | Magnetic control dual-drive medicine applying capsule robot | |
| CN116831641B (en) | Capsule-type biopsy robot driven by external magnetic field | |
| CN113576374B (en) | Plate spring driven magnetic control medicine applying capsule robot | |
| CN100482293C (en) | Slow release type remote controlled electronic capsule | |
| WO2026016610A1 (en) | Oral apparatus for injection administration in digestive tract | |
| CN116458940A (en) | A magnetically driven capsule robot with biopsy drug delivery function based on dual magnetic torsion springs | |
| CN115814247B (en) | Magnetic control type anti-interference targeted drug delivery capsule robot | |
| CN1631323A (en) | Remote control electromagnetic imbibition type gastrointestinal tract sampling microcapsule | |
| CN116785569A (en) | A gastrointestinal magnetically driven spherical medication capsule robot system and its working method | |
| CN222237623U (en) | Endoscopic capsule with drug-releasing function | |
| CN117258123A (en) | Capsule robot for micro-needle patch drug application | |
| CN201029953Y (en) | A slow-release electronic capsule | |
| CN219764273U (en) | Medicine feeding device | |
| Chen et al. | A magnetically actuated robotic capsule endoscope for in-situ visualization and microneedle-mediated targeted drug delivery in gastrointestinal tract | |
| Hsiao et al. | Integration of Small Angle Approaches Techniques in Capsule Ultrasound Devices for the Drug Delivery System | |
| CN119746259A (en) | Ratchet-shaped microneedle drug delivery carrier and preparation method and application thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |