
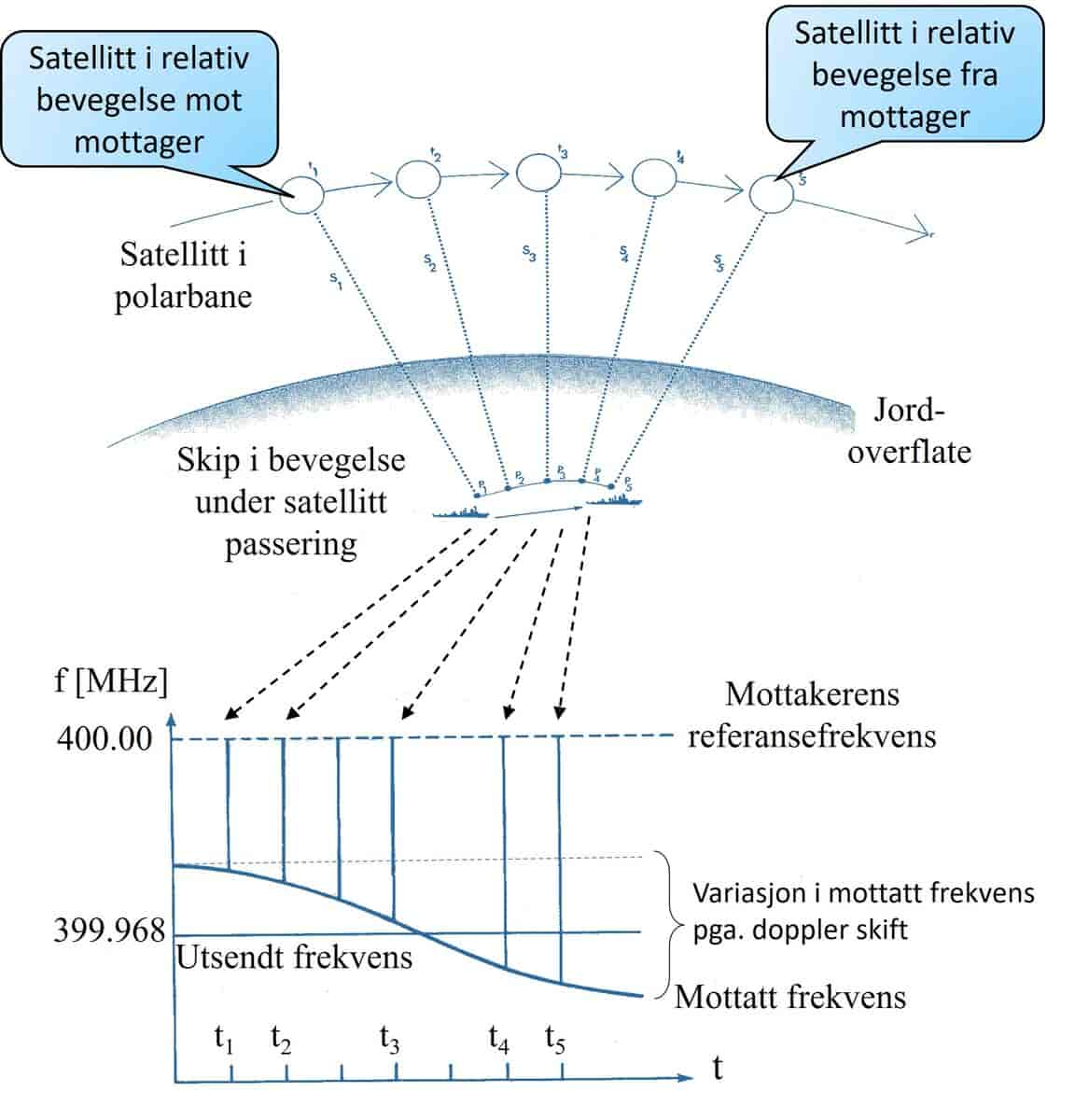

Transit var USAs første satellittnavigasjonssystem. Det ble utviklet for den amerikanske marine, men ble senere gjort tilgjengelig for sivilt bruk. Den første satellitten i systemet, Transit 1A, ble skutt opp 17. september 1959. Systemet var i virksomhet fram til 31. desember 1996, etter bruken gradvis hadde blitt erstattet av GPS. Systemet benyttet seg av prinsippet om at posisjonen til en mottaker kan bestemmes når en satellitt passerer, ved å måle dopplereffekten på signalet over en periode på 10—15 minutter.
Faktaboks
- Uttale
- trˈænsit
- Også kjent som
-
Navy Navigation Satellite System (NNSS)

Kommentarer
Kommentarer til artikkelen blir synlig for alle. Ikke skriv inn sensitive opplysninger, for eksempel helseopplysninger. Fagansvarlig eller redaktør svarer når de kan. Det kan ta tid før du får svar.
Du må være logget inn for å kommentere.