WO2018103048A1 - 防止提升系统冲击振动的方法及装置 - Google Patents
防止提升系统冲击振动的方法及装置 Download PDFInfo
- Publication number
- WO2018103048A1 WO2018103048A1 PCT/CN2016/109071 CN2016109071W WO2018103048A1 WO 2018103048 A1 WO2018103048 A1 WO 2018103048A1 CN 2016109071 W CN2016109071 W CN 2016109071W WO 2018103048 A1 WO2018103048 A1 WO 2018103048A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- lifting
- acceleration
- lifting system
- vibration period
- ratio
- Prior art date
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/002—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion characterised by the control method or circuitry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/16—Applications of indicating, registering, or weighing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/40—Control devices
- B66D1/48—Control devices automatic
- B66D1/485—Control devices automatic electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/54—Safety gear
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/042—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators in which a parameter or coefficient is automatically adjusted to optimise the performance
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16Z—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS, NOT OTHERWISE PROVIDED FOR
- G16Z99/00—Subject matter not provided for in other main groups of this subclass
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F2230/00—Purpose; Design features
- F16F2230/18—Control arrangements
Definitions
- the present invention provides a method for preventing impact vibration of a lifting system in order to effectively prevent a time-varying simulation parameter that cannot adjust the acceleration in time due to a change in the weight of the load, thereby improving the technical problem existing in the starting method of the existing lifting system. Damage to the shock and vibration caused by the system and its power transmission device can further extend the service life of the lifting system.
- the invention provides a method for preventing impact vibration of a lifting system, the method comprising: obtaining a weight of a load in a lifting container; obtaining a preset basic parameter of the lifting system; and according to the weight of the load in the lifting container and the preset
- the basic parameters of the lifting system determine a fundamental vibration period of the lifting rope when the lifting system is started; obtain a preset lifting system calculation parameter; and determine the lifting according to the fundamental vibration period and the preset lifting system calculation parameter a time-varying simulation parameter of the acceleration of the system during the lifting process; the lifting according to the determined time-varying simulation parameter of the acceleration The container is lifted.
- the preset lifting system basic parameters include: a weight of the lifting container, an expected lifting height of the lifting system, a quantity of the lifting rope, a unit length quality of the lifting rope, The modulus of elasticity of the hoisting rope and the cross-sectional area of the hoisting rope.
- the preset lifting system calculation parameter includes: an expected lifting speed of the lifting system, a ratio N of an initial variable acceleration time length to a fundamental vibration period, and a total time length and a base of the starting acceleration.
- the ratio of the wave vibration period K N is a ratio of the wave vibration period K N .
- determining, by the obtained weight of the load in the lifting container and the preset basic parameters of the lifting system, determining a fundamental wave vibration period of the lifting rope when the lifting system is started as:
- N 1 is the number of the hoisting ropes
- P K is the mass per unit length of the hoisting rope
- h is the lifting The expected lifting height of the system
- m 1 is the weight of the lifting container
- m 2 is the weight of the load in the lifting container
- determining a time-varying simulation parameter of the acceleration of the lifting system by using the fundamental wave vibration period and a preset lifting system calculation parameter is:
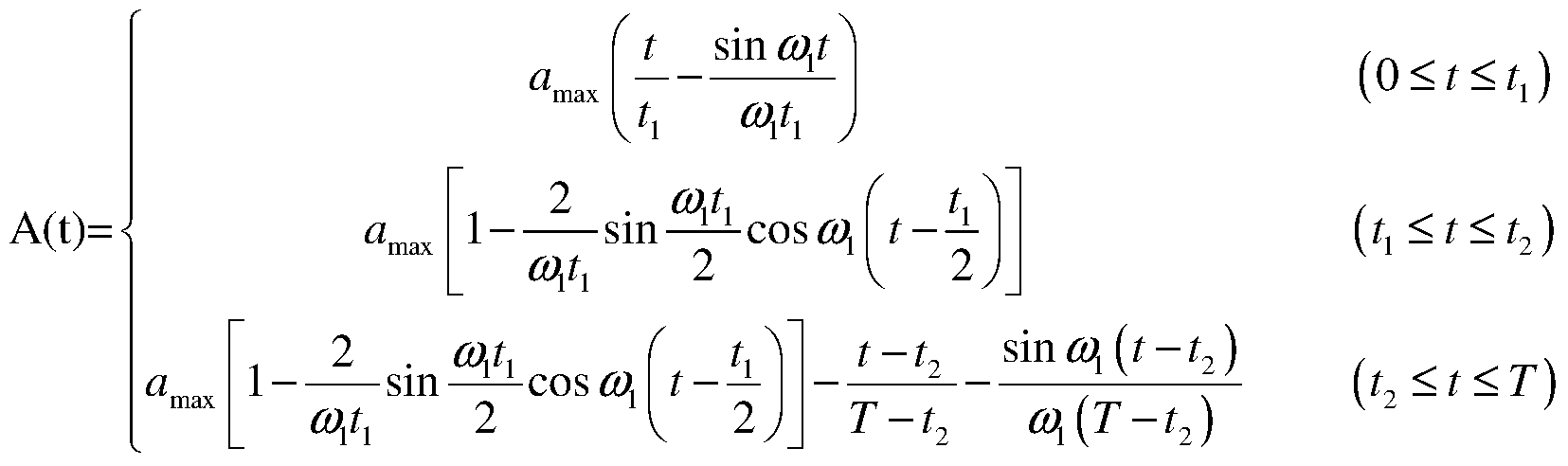
- the calculation formula for determining the time-varying simulation parameter of the acceleration according to the setting is:
- v is the expected lifting speed of the lifting system
- [0, t 1 ] is the initial variable acceleration time interval
- [t 2 , T] is the last variable acceleration time interval
- [t 1 , t 2 ] is the acceleration a fixed time interval
- T is the total time length of the starting acceleration experienced by the speed of the lifting system from 0 to the expected lifting speed v
- the present invention also provides a device for preventing impact vibration of a lifting system, the device comprising: a weighing unit and a control unit;
- the weighing unit is configured to detect the weight of the load in the lifting container, and transmit the detected data of the weight of the load in the lifting container to the control unit;
- the control unit is configured to determine a fundamental wave vibration period of the lifting rope when the lifting system is started according to the weight of the load in the lifting container and a preset basic parameter of the lifting system; according to the fundamental vibration period and the preset
- the lifting system calculation parameter determines a time varying simulation parameter of the acceleration of the lifting system; the lifting vessel is lifted by controlling a power transmission of the lifting system with a time varying simulation parameter of the determined acceleration.
- the invention can obtain the weight of the load in the lifting container when the lifting system is started, according to the obtained weight of the lifting object in the lifting container and the preset lifting in the control unit.
- the basic parameters of the system determine the fundamental vibration period of the lifting rope when the lifting system is started, and further determine the time-varying simulation parameters of the acceleration of the lifting system according to the fundamental vibration period and the preset lifting system calculation parameters, that is, each startup can be based on Different parameters determine the appropriate control method.
- FIG. 1 is a schematic diagram of preventing impact vibration of a lifting system according to an embodiment of the present invention
- FIG. 2 is a flow chart of a method for preventing impact vibration of a lifting system according to an embodiment of the present invention
- FIG. 3 is a graph showing a time-varying simulation parameter of acceleration according to an embodiment of the present invention.
- FIG. 4 is a schematic diagram of an apparatus for preventing impact vibration of a lifting system according to an embodiment of the present invention
- FIG. 5 is a schematic diagram of an apparatus for preventing impact vibration of a lifting system according to another embodiment of the present invention.
- the weighing unit 1 is used for detecting and determining the current load weight of the lifting container 5, and its output end is connected to the input end of the control unit 2.
- the output of the control unit 2 is connected to the input of the power transmission device 3, and the control of the input signal of the power transmission device 3 is realized by the control unit 2, thereby realizing the control of the lifting system.
- the apparatus for preventing shock vibration of the lifting system shows that the weighing unit 1 in FIG. 4 or FIG. 5 is read and raised each time the weight of the load in the lifting container 5 is changed.
- the current load weight in the container 5 and the data on the weight of the load are sent to the control unit 2.
- the control unit 2 determines the time-varying simulation parameter of the acceleration according to the weight of the load in the lifting container 5, the preset basic parameters of the lifting system, and the preset lifting system calculation parameters, and obtains the time-varying simulation parameters according to the determined acceleration.
- the control signal is input to the power transmission device 3.
- the calculation method for determining the time-varying simulation parameter of the acceleration by the control unit 2 is: firstly, according to the weight of the load sent by the weighing unit 1 and the preset basic parameters of the lifting system, determining the lifting of the connection between the lifting system and the lifting container 5 when the lifting system is started The fundamental vibration period of the rope 4.
- the basic parameters of the preset lifting system include: the weight of the lifting container 5, the expected lifting height of the lifting system, the number of the lifting ropes 4, the mass per unit length of the lifting rope 4, the elastic modulus of the lifting rope 4, and the lifting rope 4 Cross-sectional area. Then, according to the fundamental vibration period and the preset lifting system calculation parameters, the time-varying simulation parameters of the acceleration of the lifting system are determined.
- the preset lifting system calculation parameters include: an expected lifting speed of the lifting system, a ratio N of the initial variable acceleration time length to the fundamental vibration period, a total time length of the starting acceleration, and a ratio K N of the fundamental vibration period.
- the ratio N of the initial variable acceleration time length to the fundamental vibration period and the ratio of the total time length of the starting acceleration to the fundamental vibration period K N are specific values obtained according to the lifting system impact limit theory.
- the weight of the load in the lifting container 5 when the weight of the load in the lifting container 5 is determined, it can be timely Determining a time-varying simulation parameter suitable for the acceleration of the hoist system, thereby preventing time-varying simulation parameters that cannot be adjusted in time due to changes in the weight of the load at each start, and thus to the hoisting system and its power transmission device 3 Damage caused by shock vibration.
- FIG. 2 is a flow chart of a method for preventing shock vibration of a lifting system according to an embodiment of the present invention. As shown in FIG. 2, the method for preventing impact vibration of a lifting system according to an embodiment of the present invention includes the following steps:
- Step S01 start.
- step S02 the weight data of the load in the lifting container 5 is read. This data is collected by the weighing unit 1 and transmitted to the control unit 2.
- step S03 the basic parameters of the preset lifting system are read.
- the basic parameters of the preset lifting system read include: the weight of the lifting container 5, the expected lifting height of the lifting system, the number of lifting ropes 4, the mass per unit length of the lifting rope 4, the elastic modulus of the lifting rope 4, and the lifting rope 4 Cross-sectional area.
- step S04 the ratio of the self-weight of the hoisting rope 4 to the total load weight currently carried by the hoisting rope 4 is determined.
- the specific algorithm is:
- the ratio ⁇ 1 of the self-weight of the hoisting rope 4 to the total load weight currently carried by the hoisting rope 4 is calculated according to the following formula, namely:
- step S05 the fundamental vibration frequency of the hoisting rope 4 at the start of the lifting system is determined.
- the specific algorithm is:
- the calculation formula of the propagation velocity j of the elastic wave is: Where E is the modulus of elasticity of the hoisting rope 4, A is the cross-sectional area of the hoisting rope 4, and P K is the mass per unit length of the hoisting rope.
- step S06 the fundamental vibration period when the lifting system is started is determined.
- the specific algorithm is:
- ⁇ 1 is the fundamental vibration frequency
- a preset lifting system calculation parameter is obtained.
- the calculation parameters include: the expected lifting speed of the lifting system, the ratio N of the initial variable acceleration time to the fundamental vibration period, the ratio of the total time length of the starting acceleration to the fundamental vibration period K N .
- step S08 a time-varying simulation parameter of the acceleration is determined.
- the specific algorithm is:
- FIG. 3 is a graph showing a time-varying simulation parameter of an acceleration according to an embodiment of the present invention.
- the time-varying simulation parameter is a startup time-varying simulation parameter commonly used in a lifting system.
- v is the expected lifting speed to be achieved by the lifting system
- [0, t 1 ] is the initial variable acceleration time interval
- [t 2 , T] is the last variable acceleration time interval.
- the calculation formula of the time-varying simulation parameter of the acceleration can be determined, that is, the formula:
- the time-varying simulation parameters of the actual acceleration can also be referred to FIG. 3, and the difference is only the time-varying simulation parameters of the actual acceleration shown in FIG. 3, and the parameters in FIG. 3 are specific values.
- the ratio N of the initial variable acceleration time length to the fundamental vibration period, and the ratio of the total time length of the starting acceleration to the fundamental vibration period K N are determined according to the law obtained by the lifting system impact limiting theory. Out.
- the theory and method of increasing the impact limit of the system are:
- the maximum value of the acceleration can be determined as The value of the ratio N of the ratio of the initial variable acceleration time to the fundamental vibration period and the total time length of the starting acceleration to the fundamental vibration period K N is shown in Figure 1:
- the hoisting rope 4 is regarded as a continuous elastic body, and its dynamic mathematical expression is:
- u 1 is the section displacement of the rising side of the hoisting rope 4
- ⁇ ⁇ is the rope toughness coefficient
- a(t) is the system lifting acceleration
- E is the elastic modulus of the hoisting rope 4
- A is the sectional area of the hoisting rope 4
- P K is the mass per unit length of the hoisting rope 4.
- ⁇ 1 is the fundamental vibration frequency and a is the acceleration of the lifting system.
- ⁇ A max /a max , that is, ⁇ be a value indicating the relationship between the fundamental wave influence of the hoisting rope 4 of the hoisting system and the hoisting acceleration of the hoisting system, and also the dynamic tension effect of the hoisting rope 4 .
- ⁇ the fundamental wave influence (acceleration effect) is equivalent to the system acceleration, that is, the elastic vibration of the hoisting rope 4 is eliminated at this time, and the elastic dynamic tension of the hoisting rope 4 is equal to the rigid body dynamic tension, and the hoisting rope 4 is lifted.
- the elastic acceleration is equal to the acceleration of the hoist.
- step S09 the lifting operation is performed by the power transmission device 3.
- the control unit 2 outputs a time-varying simulation parameter of the acceleration of the system to the power transmission device 3, which starts the acceleration in accordance with the time-varying simulation parameter of the acceleration of the system, and controls the lifting of the container 5.
- the time-varying simulation parameter of the acceleration is determined by the control unit 2 firstly according to the weight of the load transmitted by the weighing unit 1 and the preset basic parameters of the lifting system, and the fundamental wave vibration period of the lifting rope 4 when the system is lifted is determined, and then according to the fundamental wave.
- the vibration period and the preset lifting system calculation parameters are determined.
- the basic parameters of the preset lifting system include: the weight of the lifting container 5, the expected lifting height of the lifting system, the number of the lifting ropes 4, the mass per unit length of the lifting rope 4, the elastic modulus of the lifting rope 4, and the lifting rope 4
- the cross-sectional area of the preset lifting system includes: the expected lifting speed of the lifting system, the ratio N of the initial variable acceleration time to the fundamental vibration period, and the ratio of the total time length of the starting acceleration to the fundamental vibration period K. N.
- the ratio of the initial variable acceleration time length to the fundamental vibration period N and the total time length of the starting acceleration and the fundamental vibration period K N are both given according to the law of the lifting system impact limit theory.
- the apparatus of the present invention includes a weighing unit 1 and a control unit 2, wherein
- the weighing unit 1 is disposed in the bottom of the lifting container 5 in the lifting system for detecting the weight of the load in the lifting container 5, and transmitting the detected data of the weight of the load in the lifting container 5. Send to control unit 2.
- the control unit 2 is configured to determine the fundamental vibration period of the hoisting rope 4 when the hoisting system is started according to the weight of the load in the lifting container 5 and the preset basic parameters of the lifting system.
- the basic parameters of the preset lifting system include: the weight of the lifting container 5, the expected lifting height of the lifting system, the number of the lifting ropes 4, the mass per unit length of the lifting rope 4, the elastic modulus of the lifting rope 4, and the lifting rope 4 Cross-sectional area.
- the control unit 2 determines the fundamental vibration period of the hoisting rope 4 when the lifting system is started according to the weight of the load in the lifting container 5 and the preset basic parameters of the lifting system sent by the weighing unit 1 as follows:
- N 1 is the number of the hoisting ropes 4
- P K is the mass per unit length of the hoisting rope 4
- h is the expected lifting height of the lifting system
- m 1 is the weight of the lifting container 5
- m 2 is the weight of the load in the lifting container 5;
- the control unit 2 is further configured to determine a time varying simulation parameter of the acceleration of the lifting system based on the fundamental vibration period and the preset lifting system calculation parameters.
- the preset lifting system calculation parameters include: an expected lifting speed of the lifting system, a ratio N of the initial variable acceleration time length to the fundamental vibration period, and a ratio K N of the total time length of the starting acceleration to the fundamental vibration period.
- control unit 2 determines the time-varying simulation parameter of the acceleration of the lifting system according to the fundamental vibration period and the preset lifting system calculation parameter is as follows:
- the calculation formula of the time-varying simulation parameter for determining the starting acceleration according to the setting is:
- v is the expected lifting speed of the lifting system
- [0, t 1 ] is the initial variable acceleration time interval
- [t 2 , T] is the last variable acceleration time interval
- [t 1 , t 2 ] is Acceleration fixed acceleration time interval
- T is the total time length of the starting acceleration experienced by the speed of the lifting system from 0 to the expected lifting speed v
- the length of the variable acceleration time is equal to the length of the last variable acceleration time
- the ratio of the total time length of the starting acceleration to the fundamental vibration period K N is a real number greater than zero
- the control unit 2 is also configured to lift the lifting vessel 5 by means of a time-varying simulation parameter of the determined acceleration of the power transmission 3 of the control system.
- the apparatus for preventing shock vibration of the lifting system in the embodiment shown in FIG. 4 further includes a storage unit (not shown) for storing preset lifting system basic parameters and the preset lifting system calculation parameters.
- the weighing unit 1 is disposed at a connection position of the lifting container 5 and the hoisting rope 4 for detecting the weight of the load in the lifting container 5, and transmitting the detected data of the weight of the load in the lifting container 5 to the control Unit 2.
- the control unit 2 is configured to determine the fundamental vibration period of the hoisting rope 4 when the hoisting system is started according to the weight of the load in the lifting container 5 and the preset basic parameters of the lifting system.
- the basic parameters of the preset lifting system include: the weight of the lifting container 5, the expected lifting height of the lifting system, the number of the lifting ropes 4, the mass per unit length of the lifting rope 4, the elastic modulus of the lifting rope 4, and the lifting rope 4 Cross-sectional area.
- the control unit 2 determines the fundamental vibration period of the hoisting rope 4 when the lifting system is started according to the weight of the load in the lifting container 5 and the preset basic parameters of the lifting system sent by the weighing unit 1 as follows:
- the control unit 2 is further configured to determine a time varying simulation parameter of the acceleration of the lifting system based on the fundamental vibration period and the preset lifting system calculation parameters.
- the preset lifting system calculation parameters include: an expected lifting speed of the lifting system, a ratio N of the initial variable acceleration time length to the fundamental vibration period, and a ratio K N of the total time length of the starting acceleration to the fundamental vibration period.
- control unit 2 determines the time-varying simulation parameter of the acceleration of the lifting system according to the fundamental vibration period and the preset lifting system calculation parameter is as follows:
- the calculation formula of the time-varying simulation parameter for determining the starting acceleration according to the setting is:
- v is the expected lifting speed of the lifting system
- [0, t 1 ] is the initial variable acceleration time interval
- [t 2 , T] is the last variable acceleration time interval
- [t 1 , t 2 ] is Acceleration fixed acceleration time interval
- T is the total time length of the starting acceleration experienced by the speed of the lifting system from 0 to the expected lifting speed v
- the length of the variable acceleration time is equal to the length of the last variable acceleration time
- the ratio of the total time length of the starting acceleration to the fundamental vibration period K N is a real number greater than zero
- the control unit 2 is also configured to lift the lifting vessel by means of a time-varying simulation parameter of the determined acceleration of the power transmission 3 of the control system.
- the apparatus for preventing shock vibration of the lifting system in the embodiment shown in FIG. 5 further includes a storage unit (not shown) for storing preset lifting system basic parameters and the preset lifting system calculation parameters.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Health & Medical Sciences (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Aviation & Aerospace Engineering (AREA)
- Artificial Intelligence (AREA)
- Control And Safety Of Cranes (AREA)
Abstract
Description
















Claims (13)
- 一种防止提升系统冲击振动的方法,所述方法包括:获取提升容器内的载物重量;获取预设的提升系统基本参数;根据提升容器内的载物重量和所述提升系统基本参数确定所述提升系统启动时提升绳索的基波振动周期;获取预设的提升系统计算参数;根据所述基波振动周期和所述预设的提升系统计算参数确定所述提升系统的提升过程中的加速度的时变模拟参数;根据所确定的加速度的时变模拟参数对所述提升容器进行提升。
- 根据权利要求1所述的方法,其中所述预设的提升系统基本参数包括:所述提升容器的自身重量、所述提升系统的预期提升高度、所述提升绳索的数量、所述提升绳索的单位长度质量、所述提升绳索的弹性模数以及所述提升绳索的截面积。
- 根据权利要求1所述的方法,其中所述预设的提升系统计算参数包括:所述提升系统的预期提升速度、初始的变加速时间长度与基波振动周期的比值N、以及启动加速度的总时间长度与基波振动周期的比值KN。
- 根据权利要求3所述的方法,其中所述初始的变加速时间长度与基波振动周期的比值N与所述启动加速度的总时间长度与基波振动周期的比值KN,N=20,KN=1。
- 根据权利要求2所述的方法,其中通过所述获取的提升容器内的载物重量和所述预设的提升系统基本参数确定所述提升系统启动时提升绳索的基波振动周期,为:依据公式计算出所述绳索的自身重量与提升绳索承载的总载物重量的比值β1,其中,N1为所述提升绳索的数量,PK为所述提升绳索 的单位长度质量,h为所述提升系统的预期提升高度,m1为所述提升容器的自身重量,m2为所述提升容器内的载物重量;
 依据公式计算出所述提升系统启动时的基波振动频率ω1,其中λ1为与β1相关的方程式λ1tanλ1=β1的解,h为所述提升系统的预期提升高度,j为所述提升绳索的弹性波传播速度,并且j的计算公式为:
依据公式计算出所述提升系统启动时的基波振动频率ω1,其中λ1为与β1相关的方程式λ1tanλ1=β1的解,h为所述提升系统的预期提升高度,j为所述提升绳索的弹性波传播速度,并且j的计算公式为: 其中E为所述提升绳索的弹性模数,A为所述提升绳索的截面积,PK为所述提升绳索的单位长度质量;
其中E为所述提升绳索的弹性模数,A为所述提升绳索的截面积,PK为所述提升绳索的单位长度质量; 依据公式计算出所述基波振动周期Tj1。
依据公式计算出所述基波振动周期Tj1。
- 根据权利要求3所述的方法,其中通过所述基波振动周期和预设的提升系统计算参数确定所述提升系统的加速度的时变模拟参数,为:根据设定确定所述启动加速度的时变模拟参数计算公式为:

 根据所述计算公式以及确定的所述初始的变加速时间长度与基波振动周期的比值N、启动加速度的总时间长度与基波振动周期的比值KN、所述基波振动周期Tj1和所述提升系统的预期提升速度v,确定加速度的时变模拟 参数;其中,v为所述提升系统的预期提升速度,其中[0,t1]为初始的变加速时间区间,[t2,T]为末次的变加速时间区间,[t1,t2]为加速度固定的加速时间区间,T为所述提升系统的速度从0开始到达预期提升速度v时所经历的启动加速度的总时间长度,且t1=T-t2=KNT/N,即初始的变加速时间长度与末次的变加速时间的长度相等;所述启动加速度的总时间长度与基波振动周期的比值KN为大于零的实数,所述初始的变加速时间长度与基波振动周期的比值N=t1/Tj1为大于零的正整数。
根据所述计算公式以及确定的所述初始的变加速时间长度与基波振动周期的比值N、启动加速度的总时间长度与基波振动周期的比值KN、所述基波振动周期Tj1和所述提升系统的预期提升速度v,确定加速度的时变模拟 参数;其中,v为所述提升系统的预期提升速度,其中[0,t1]为初始的变加速时间区间,[t2,T]为末次的变加速时间区间,[t1,t2]为加速度固定的加速时间区间,T为所述提升系统的速度从0开始到达预期提升速度v时所经历的启动加速度的总时间长度,且t1=T-t2=KNT/N,即初始的变加速时间长度与末次的变加速时间的长度相等;所述启动加速度的总时间长度与基波振动周期的比值KN为大于零的实数,所述初始的变加速时间长度与基波振动周期的比值N=t1/Tj1为大于零的正整数。 - 一种防止提升系统冲击振动的装置,所述装置包括:称重单元和控制单元,其中:所述称重单元,配置为检测提升容器内的载物重量,并将检测到的所述提升容器内的载物重量的数据传送至所述控制单元;所述控制单元,配置为根据所述提升容器内的载物重量和预设的提升系统基本参数确定所述提升系统启动时提升绳索的基波振动周期;根据所述基波振动周期和预设的提升系统计算参数确定所述提升系统的加速度的时变模拟参数;通过控制所述提升系统的动力传动装置以所确定的加速度的时变模拟参数对所述提升容器进行提升。
- 根据权利要求7所述的装置,其中,所述装置还包括:存储单元,配置为存储所述预设的提升系统基本参数和所述预设的提升系统计算参数。
- 根据权利要求7所述的装置,其中,所述预设的提升系统基本参数包括:所述提升容器的自身重量、所述提升系统的预期提升高度、所述提升绳索的数量、所述提升绳索的单位长度质量、所述提升绳索的弹性模数以及所述提升绳索的截面积。
- 根据权利要求7所述的装置,其中,所述预设的提升系统计算参数 包括:所述提升系统的预期提升速度、初始的变加速时间长度与基波振动周期的比值N、以及启动加速度的总时间长度与基波振动周期的比值KN。
- 根据权利要求10所述的装置,其中,所述初始的变加速时间长度与基波振动周期的比值N,与所述启动加速度的总时间长度与基波振动周期的比值KN,N=20,KN=1。
- 根据权利要求9所述的装置,其中,所述控制单元,配置为通过以下方式确定所述提升系统启动时提升绳索的基波振动周期:依据公式计算出所述绳索的自身重量与提升绳索承载的总载物重量的比值β1,其中,N1为所述提升绳索的数量,PK为所述提升绳索的单位长度质量,h为所述提升系统的预期提升高度,m1为所述提升容器的自身重量,m2为所述提升容器内的载物重量;
 依据公式计算出所述提升系统启动时的基波振动频率ω1,其中λ1为与β1相关的方程式λ1tanλ1=β1的解,h为所述提升系统的预期提升高度,j为所述提升绳索的弹性波传播速度,并且j的计算公式为:
依据公式计算出所述提升系统启动时的基波振动频率ω1,其中λ1为与β1相关的方程式λ1tanλ1=β1的解,h为所述提升系统的预期提升高度,j为所述提升绳索的弹性波传播速度,并且j的计算公式为: 其中E为所述提升绳索的弹性模数,A为所述提升绳索的截面积,PK为所述提升绳索的单位长度质量;
其中E为所述提升绳索的弹性模数,A为所述提升绳索的截面积,PK为所述提升绳索的单位长度质量; 依据公式计算出所述基波振动周期Tj1。
依据公式计算出所述基波振动周期Tj1。
- 根据权利要求10所述的装置,其中,所述控制单元,还配置为通过以下方式确定所述提升系统的加速度的时变模拟参数:根据设定确定所述启动加速度的时变模拟参数计算公式为:

 根据所述计算公式以及确定的所述初始的变加速时间长度与基波振动周期的比值N、启动加速度的总时间长度与基波振动周期的比值KN、所述基波振动周期Tj1和所述提升系统的预期提升速度v,确定加速度的时变模拟参数;其中,v为所述提升系统的预期提升速度,其中[0,t1]为初始的变加速时间区间,[t2,T]为末次的变加速时间区间,[t1,t2]为加速度固定的加速时间区间,T为所述提升系统的速度从0开始到达预期提升速度v时所经历的启动加速度的总时间长度,且t1=T-t2=KNT/N,即初始的变加速时间长度与末次的变加速时间的长度相等;所述启动加速度的总时间长度与基波振动周期的比值KN为大于零的实数,所述初始的变加速时间长度与基波振动周期的比值N=t1/Tj1为大于零的正整数。
根据所述计算公式以及确定的所述初始的变加速时间长度与基波振动周期的比值N、启动加速度的总时间长度与基波振动周期的比值KN、所述基波振动周期Tj1和所述提升系统的预期提升速度v,确定加速度的时变模拟参数;其中,v为所述提升系统的预期提升速度,其中[0,t1]为初始的变加速时间区间,[t2,T]为末次的变加速时间区间,[t1,t2]为加速度固定的加速时间区间,T为所述提升系统的速度从0开始到达预期提升速度v时所经历的启动加速度的总时间长度,且t1=T-t2=KNT/N,即初始的变加速时间长度与末次的变加速时间的长度相等;所述启动加速度的总时间长度与基波振动周期的比值KN为大于零的实数,所述初始的变加速时间长度与基波振动周期的比值N=t1/Tj1为大于零的正整数。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2016/109071 WO2018103048A1 (zh) | 2016-12-08 | 2016-12-08 | 防止提升系统冲击振动的方法及装置 |
| US16/324,905 US11320021B2 (en) | 2016-12-08 | 2016-12-08 | Method and device for preventing impact vibration of lift system |
| AU2016431712A AU2016431712B2 (en) | 2016-12-08 | 2016-12-08 | Method and device for preventing impact vibration of lift system |
| CN201611243210.9A CN106815472A (zh) | 2016-12-08 | 2016-12-29 | 防止提升系统冲击振动的方法及装置 |
| ZA2018/02038A ZA201802038B (en) | 2016-12-08 | 2018-03-27 | Method and device for preventing impact vibration of hoisting system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2016/109071 WO2018103048A1 (zh) | 2016-12-08 | 2016-12-08 | 防止提升系统冲击振动的方法及装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018103048A1 true WO2018103048A1 (zh) | 2018-06-14 |
Family
ID=59110443
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2016/109071 WO2018103048A1 (zh) | 2016-12-08 | 2016-12-08 | 防止提升系统冲击振动的方法及装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11320021B2 (zh) |
| CN (1) | CN106815472A (zh) |
| AU (1) | AU2016431712B2 (zh) |
| WO (1) | WO2018103048A1 (zh) |
| ZA (1) | ZA201802038B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018103048A1 (zh) * | 2016-12-08 | 2018-06-14 | 太原理工大学 | 防止提升系统冲击振动的方法及装置 |
| CN109467011A (zh) * | 2017-09-08 | 2019-03-15 | 上海欧控电气技术有限公司 | 一种适用于起重机行业的分段变加速度的s曲线控制方法 |
| CN113916359B (zh) * | 2021-09-16 | 2023-08-08 | 许昌许继风电科技有限公司 | 振动开关调试方法及装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010030728A (ja) * | 2008-07-28 | 2010-02-12 | Seibu Electric & Mach Co Ltd | スタッカクレーンの制振方法 |
| CN103303798A (zh) * | 2012-03-09 | 2013-09-18 | 利勃海尔-韦尔克嫩青有限公司 | 起重机控制器、起重机及用于控制起重机的方法 |
| CN103482475A (zh) * | 2013-09-30 | 2014-01-01 | 上海集成电路研发中心有限公司 | 用于自动化物料传输系统的输送车 |
| CN105366549A (zh) * | 2014-12-11 | 2016-03-02 | 冯春魁 | 起重机参数的测算、控制、运行和载荷监控的方法及系统 |
| CN106815472A (zh) * | 2016-12-08 | 2017-06-09 | 太原理工大学 | 防止提升系统冲击振动的方法及装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101088275B1 (ko) * | 2006-12-13 | 2011-11-30 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터 장치 |
| JP2009012932A (ja) | 2007-07-04 | 2009-01-22 | Toshiba Elevator Co Ltd | エレベータの制御装置 |
| DE102008024513B4 (de) * | 2008-05-21 | 2017-08-24 | Liebherr-Werk Nenzing Gmbh | Kransteuerung mit aktiver Seegangsfolge |
| JP5168482B2 (ja) | 2008-06-25 | 2013-03-21 | 株式会社Ihi | 制振位置決め制御方法および装置 |
| US9038782B2 (en) * | 2009-03-20 | 2015-05-26 | Otis Elevator Company | Elevator load bearing member vibration control |
| JP5601488B2 (ja) | 2009-05-20 | 2014-10-08 | 清水建設株式会社 | 吊り制振構造 |
| KR101412226B1 (ko) * | 2010-03-03 | 2014-06-25 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터의 제어 장치 |
| NO337712B1 (no) * | 2010-03-24 | 2016-06-06 | Nat Oilwell Varco Norway As | Anordning og fremgangsmåte for å redusere dynamiske laster i kraner |
| US8761947B2 (en) * | 2010-06-30 | 2014-06-24 | Mitsubishi Electric Research Laboratories, Inc. | System and method for reducing lateral vibration in elevator systems |
| FI20115922A0 (fi) * | 2011-09-20 | 2011-09-20 | Konecranes Oyj | Nosturin ohjaus |
| US10005641B2 (en) * | 2014-06-17 | 2018-06-26 | Thyssenkrupp Elevator Corporation | Elevator dampener and energy harvesting device and method |
| CN204847871U (zh) | 2015-08-29 | 2015-12-09 | 河南真牛起重机有限公司 | 一种单梁起重机电动葫芦架减震调节结构 |
-
2016
- 2016-12-08 WO PCT/CN2016/109071 patent/WO2018103048A1/zh active Application Filing
- 2016-12-08 US US16/324,905 patent/US11320021B2/en active Active
- 2016-12-08 AU AU2016431712A patent/AU2016431712B2/en active Active
- 2016-12-29 CN CN201611243210.9A patent/CN106815472A/zh active Pending
-
2018
- 2018-03-27 ZA ZA2018/02038A patent/ZA201802038B/en unknown
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010030728A (ja) * | 2008-07-28 | 2010-02-12 | Seibu Electric & Mach Co Ltd | スタッカクレーンの制振方法 |
| CN103303798A (zh) * | 2012-03-09 | 2013-09-18 | 利勃海尔-韦尔克嫩青有限公司 | 起重机控制器、起重机及用于控制起重机的方法 |
| CN103482475A (zh) * | 2013-09-30 | 2014-01-01 | 上海集成电路研发中心有限公司 | 用于自动化物料传输系统的输送车 |
| CN105366549A (zh) * | 2014-12-11 | 2016-03-02 | 冯春魁 | 起重机参数的测算、控制、运行和载荷监控的方法及系统 |
| CN106815472A (zh) * | 2016-12-08 | 2017-06-09 | 太原理工大学 | 防止提升系统冲击振动的方法及装置 |
Non-Patent Citations (2)
| Title |
|---|
| LI, YUJIN: "Elastic Vibration Theory and Dynamics Characteristic Analysis of Lifting Rope of Elevator", HOISTING AND CONVEYING MACHINERY, 30 April 2003 (2003-04-30), pages 32 - 36 * |
| LI, YUJIN: "Elastic Vibration Theory and Dynamics Characteristic Analysis of Lifting Rope of Elevator", HOISTING AND CONVEYING MACHINERY, vol. 4, 30 April 2003 (2003-04-30), pages 32 - 36 * |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2016431712A1 (en) | 2019-02-21 |
| US11320021B2 (en) | 2022-05-03 |
| CN106815472A (zh) | 2017-06-09 |
| US20210285513A1 (en) | 2021-09-16 |
| AU2016431712B2 (en) | 2020-01-02 |
| ZA201802038B (en) | 2019-01-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018103048A1 (zh) | 防止提升系统冲击振动的方法及装置 | |
| SE502079C2 (sv) | Styrning av en packningsmaskin med mätning av underlagets egenskaper | |
| CN103183263B (zh) | 结构物的安全防范系统以及具备其的电梯 | |
| JP5605860B2 (ja) | エレベータの運転制御方法及び運転制御装置 | |
| KR102308394B1 (ko) | 엘리베이터의 제어 장치 및 가버너 로프 신축량 추정 방법 | |
| CN101948083A (zh) | 用于控制起重机升降装置的起重机控制器 | |
| CN103359568B (zh) | 电梯的控制装置 | |
| JP2013013988A (ja) | ロボット、ロボットの制御方法、およびプログラム | |
| TW200827281A (en) | Load pick-up device and control method thereof | |
| CN113029480B (zh) | 风力发电机组的叶片疲劳测试方法及叶片疲劳测试系统 | |
| CN106482885A (zh) | 一种吸盘吸附力的测试装置和测试方法 | |
| CN108792954A (zh) | 桥式卸船机抓取量控制方法 | |
| JP2017517874A (ja) | 半導体ウェハ重量計測装置および方法 | |
| CN106744361A (zh) | 一种自动调节吊塔装置 | |
| KR20110044268A (ko) | 화물 승강 장치용 조기 과부하 검출 방법 | |
| JP2010210334A (ja) | 橋脚洗掘判定方法及び橋脚基礎の健全性評価システム | |
| JP2020109377A (ja) | 計量用機械学習装置、計量用機械学習システム及び計量システム | |
| RU2015143478A (ru) | Способ контроля параметров движения подъемного устройства | |
| CN206345620U (zh) | 一种安全吊塔装置 | |
| CN105905724B (zh) | 一种电梯平衡系数的检测方法及其检测装置 | |
| CN111470425B (zh) | 一种起重机自适应称重方法 | |
| JP2016055999A (ja) | エレベーター装置 | |
| JP7657973B2 (ja) | チェーンホイストの制御 | |
| JP6643179B2 (ja) | 構造物の水底着底判断方法および水底着底判断システム | |
| JP6427324B2 (ja) | 荷振れ検出装置、確認装置及び荷振れ検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16923595 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2016431712 Country of ref document: AU Date of ref document: 20161208 Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16923595 Country of ref document: EP Kind code of ref document: A1 |