最初に、図1及び図2を参照して、本発明の実施形態に係る掘削機としてのショベル100について説明する。図1はショベル100の側面図であり、図2はショベル100の上面図である。
本実施形態では、ショベル100の下部走行体1は被駆動体としてのクローラ1Cを含む。クローラ1Cは、下部走行体1に搭載されている走行用油圧モータ2Mによって駆動される。但し、走行用油圧モータ2Mは、電動アクチュエータとしての走行用電動発電機であってもよい。具体的には、クローラ1Cは左クローラ1CL及び右クローラ1CRを含む。左クローラ1CLは左走行用油圧モータ2MLによって駆動され、右クローラ1CRは右走行用油圧モータ2MRによって駆動される。下部走行体1は、クローラ1Cによって駆動されるため、被駆動体として機能する。
下部走行体1には旋回機構2を介して上部旋回体3が旋回可能に搭載されている。被駆動体としての旋回機構2は、上部旋回体3に搭載されている旋回用油圧モータ2Aによって駆動される。但し、旋回用油圧モータ2Aは、電動アクチュエータとしての旋回用電動発電機であってもよい。上部旋回体3は、旋回機構2によって駆動されるため、被駆動体として機能する。
上部旋回体3には被駆動体としてのブーム4が取り付けられている。ブーム4の先端には被駆動体としてのアーム5が取り付けられ、アーム5の先端に被駆動体及びエンドアタッチメントとしてのバケット6が取り付けられている。ブーム4、アーム5、及びバケット6は、アタッチメントの一例である掘削アタッチメントを構成する。ブーム4はブームシリンダ7で駆動され、アーム5はアームシリンダ8で駆動され、バケット6はバケットシリンダ9で駆動される。
ブーム4にはブーム角度センサS1が取り付けられ、アーム5にはアーム角度センサS2が取り付けられ、バケット6にはバケット角度センサS3が取り付けられている。
ブーム角度センサS1はブーム4の回動角度を検出する。本実施形態では、ブーム角度センサS1は加速度センサであり、上部旋回体3に対するブーム4の回動角度であるブーム角度を検出できる。ブーム角度は、例えば、ブーム4を最も下げたときに最小角度となり、ブーム4を上げるにつれて大きくなる。
アーム角度センサS2はアーム5の回動角度を検出する。本実施形態では、アーム角度センサS2は加速度センサであり、ブーム4に対するアーム5の回動角度であるアーム角度を検出できる。アーム角度は、例えば、アーム5を最も閉じたときに最小角度となり、アーム5を開くにつれて大きくなる。
バケット角度センサS3はバケット6の回動角度を検出する。本実施形態では、バケット角度センサS3は加速度センサであり、アーム5に対するバケット6の回動角度であるバケット角度を検出できる。バケット角度は、例えば、バケット6を最も閉じたときに最小角度となり、バケット6を開くにつれて大きくなる。
ブーム角度センサS1、アーム角度センサS2、及びバケット角度センサS3はそれぞれ、可変抵抗器を利用したポテンショメータ、対応する油圧シリンダのストローク量を検出するストロークセンサ、連結ピン回りの回動角度を検出するロータリエンコーダ、ジャイロセンサ、又は、加速度センサとジャイロセンサの組み合わせ等であってもよい。
上部旋回体3には、運転室としてのキャビン10が設けられ、且つ、エンジン11等の動力源が搭載されている。また、上部旋回体3には、コントローラ30、物体検知装置70、向き検出装置85、機体傾斜センサS4、及び旋回角速度センサS5等が取り付けられている。キャビン10の内部には、操作装置26等が設けられている。なお、本書では、便宜上、上部旋回体3における、ブーム4が取り付けられている側を前方とし、カウンタウェイトが取り付けられている側を後方とする。
コントローラ30は、ショベル100を制御するための制御装置である。本実施形態では、コントローラ30は、CPU、RAM、NVRAM、及びROM等を備えたコンピュータで構成されている。そして、コントローラ30は、各機能要素に対応するプログラムをROMから読み出してRAMにロードし、対応する処理をCPUに実行させる。
物体検知装置70は、周囲監視装置の一例であり、ショベル100の周囲に存在する物体を検知するように構成されている。物体は、例えば、人、動物、車両、建設機械、建造物、又は穴等である。物体検知装置70は、例えば、超音波センサ、ミリ波レーダ、ステレオカメラ、LIDAR、距離画像センサ、又は赤外線センサ等である。本実施形態では、物体検知装置70は、キャビン10の上面前端に取り付けられた前センサ70F、上部旋回体3の上面後端に取り付けられた後センサ70B、上部旋回体3の上面左端に取り付けられた左センサ70L、及び、上部旋回体3の上面右端に取り付けられた右センサ70Rを含む。
周囲監視装置としての物体検知装置70は、ショベル100の周囲に設定された所定領域内の所定物体を検知するように構成されていてもよい。すなわち、物体検知装置70は、物体の種類、位置、及び形状等の少なくとも1つを識別できるように構成されていてもよい。例えば、物体検知装置70は、人と人以外の物体とを区別できるように構成されていてもよい。また、物体検知装置70は、物体検知装置70又はショベル100から認識された物体までの距離を算出するように構成されてもよい。
向き検出装置85は、上部旋回体3の向きと下部走行体1の向きとの相対的な関係に関する情報(以下、「向きに関する情報」とする。)を検出するように構成されている。例えば、向き検出装置85は、下部走行体1に取り付けられた地磁気センサと上部旋回体3に取り付けられた地磁気センサとの組み合わせで構成されていてもよい。或いは、向き検出装置85は、下部走行体1に取り付けられたGNSS受信機と上部旋回体3に取り付けられたGNSS受信機との組み合わせで構成されていてもよい。旋回用電動発電機で上部旋回体3が旋回駆動される構成では、向き検出装置85は、レゾルバで構成されていてもよい。向き検出装置85は、例えば、下部走行体1と上部旋回体3との間の相対回転を実現する旋回機構2に関連して設けられるセンタージョイントに配置されていてもよい。
機体傾斜センサS4は、所定の平面に対するショベル100の傾斜を検出するように構成されている。本実施形態では、機体傾斜センサS4は、水平面に関する上部旋回体3の前後軸の傾斜角及び左右軸の傾斜角を検出する加速度センサである。機体傾斜センサS4は、加速度センサとジャイロセンサの組み合わせで構成されていてもよい。上部旋回体3の前後軸及び左右軸は、例えば、互いに直交してショベル100の旋回軸上の一点であるショベル中心点を通る。
旋回角速度センサS5は、上部旋回体3の旋回角速度を検出するように構成されている。本実施形態では、旋回角速度センサS5は、ジャイロセンサである。旋回角速度センサS5は、レゾルバ又はロータリエンコーダ等であってもよい。旋回角速度センサS5は、旋回速度を検出してもよい。旋回速度は、旋回角速度から算出されてもよい。
以下では、ブーム角度センサS1、アーム角度センサS2、バケット角度センサS3、機体傾斜センサS4、及び旋回角速度センサS5の任意の組み合わせは、集合的に姿勢センサとも称される。
次に、図3を参照し、ショベル100に搭載される油圧システムの構成例について説明する。図3は、ショベル100に搭載される油圧システムの構成例を示す図である。図3は、機械的動力伝達系、作動油ライン、パイロットライン、及び電気制御系を、それぞれ二重線、実線、破線、及び点線で示している。
ショベル100の油圧システムは、主に、エンジン11、レギュレータ13、メインポンプ14、パイロットポンプ15、コントロールバルブ17、操作装置26、吐出圧センサ28、操作圧センサ29、コントローラ30、及び制御弁60等を含む。
図3において、油圧システムは、エンジン11によって駆動されるメインポンプ14から、センターバイパス管路40又はパラレル管路42を経て作動油タンクまで作動油を循環させている。
エンジン11は、ショベル100の駆動源である。本実施形態では、エンジン11は、例えば、所定の回転数を維持するように動作するディーゼルエンジンである。エンジン11の出力軸は、メインポンプ14及びパイロットポンプ15のそれぞれの入力軸に連結されている。
メインポンプ14は、作動油ラインを介して作動油をコントロールバルブ17に供給するように構成されている。本実施形態では、メインポンプ14は、斜板式可変容量型油圧ポンプである。
レギュレータ13は、メインポンプ14の吐出量(押し退け容積)を制御するように構成されている。本実施形態では、レギュレータ13は、コントローラ30からの制御指令に応じてメインポンプ14の斜板傾転角を調節することによってメインポンプ14の吐出量を制御する。
パイロットポンプ15は、パイロットラインを介して操作装置26を含む油圧制御機器に作動油を供給するように構成されている。本実施形態では、パイロットポンプ15は、固定容量型油圧ポンプである。但し、パイロットポンプ15は、省略されてもよい。この場合、パイロットポンプ15が担っていた機能は、メインポンプ14によって実現されてもよい。すなわち、メインポンプ14は、コントロールバルブ17に作動油を供給する機能とは別に、絞り等により作動油の圧力を低下させた後で操作装置26等に作動油を供給する機能を備えていてもよい。
コントロールバルブ17は、ショベル100における油圧システムを制御する油圧制御装置である。本実施形態では、コントロールバルブ17は、制御弁171~176を含む。制御弁175は制御弁175L及び制御弁175Rを含み、制御弁176は制御弁176L及び制御弁1756を含む。コントロールバルブ17は、制御弁171~176を通じ、メインポンプ14が吐出する作動油を1又は複数の油圧アクチュエータに選択的に供給できる。制御弁171~176は、メインポンプ14から油圧アクチュエータに流れる作動油の流量、及び、油圧アクチュエータから作動油タンクに流れる作動油の流量を制御するように構成されている。油圧アクチュエータは、ブームシリンダ7、アームシリンダ8、バケットシリンダ9、左走行用油圧モータ2ML、右走行用油圧モータ2MR、及び旋回用油圧モータ2Aを含む。
操作装置26は、操作者がアクチュエータの操作のために用いる装置である。アクチュエータは、油圧アクチュエータ及び電動アクチュエータの少なくとも一方を含む。本実施形態では、操作装置26は、パイロットラインを介して、パイロットポンプ15が吐出する作動油を、コントロールバルブ17内の対応する制御弁のパイロットポートに供給するように構成されている。パイロットポートのそれぞれに供給される作動油の圧力(パイロット圧)は、油圧アクチュエータのそれぞれに対応する操作装置26のレバー又はペダル(図示せず。)の操作方向及び操作量に応じた圧力である。
吐出圧センサ28は、メインポンプ14の吐出圧を検出するように構成されている。本実施形態では、吐出圧センサ28は、検出した値をコントローラ30に対して出力する。
操作圧センサ29は、操作者による操作装置26の操作の内容を検出するように構成されている。本実施形態では、操作圧センサ29は、アクチュエータのそれぞれに対応する操作装置26のレバー又はペダルの操作方向及び操作量を圧力(操作圧)の形で検出し、検出した値をコントローラ30に対して出力する。操作装置26の操作内容は、操作圧センサ以外の他のセンサを用いて検出されてもよい。
メインポンプ14は、左メインポンプ14L及び右メインポンプ14Rを含む。そして、左メインポンプ14Lは、左センターバイパス管路40L又は左パラレル管路42Lを経て作動油タンクまで作動油を循環させるように構成され、右メインポンプ14Rは、右センターバイパス管路40R又は右パラレル管路42Rを経て作動油タンクまで作動油を循環させるように構成されている。
左センターバイパス管路40Lは、コントロールバルブ17内に配置された制御弁171、173、175L、及び176Lを通る作動油ラインである。右センターバイパス管路40Rは、コントロールバルブ17内に配置された制御弁172、174、175R、及び176Rを通る作動油ラインである。
制御弁171は、左メインポンプ14Lが吐出する作動油を左走行用油圧モータ2MLへ供給し、且つ、左走行用油圧モータ2MLが吐出する作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁172は、右メインポンプ14Rが吐出する作動油を右走行用油圧モータ2MRへ供給し、且つ、右走行用油圧モータ2MRが吐出する作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁173は、左メインポンプ14Lが吐出する作動油を旋回用油圧モータ2Aへ供給し、且つ、旋回用油圧モータ2Aが吐出する作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁174は、右メインポンプ14Rが吐出する作動油をバケットシリンダ9へ供給し、且つ、バケットシリンダ9内の作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁175Lは、左メインポンプ14Lが吐出する作動油をブームシリンダ7へ供給するために作動油の流れを切り換えるスプール弁である。制御弁175Rは、右メインポンプ14Rが吐出する作動油をブームシリンダ7へ供給し、且つ、ブームシリンダ7内の作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁176Lは、左メインポンプ14Lが吐出する作動油をアームシリンダ8へ供給し、且つ、アームシリンダ8内の作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
制御弁176Rは、右メインポンプ14Rが吐出する作動油をアームシリンダ8へ供給し、且つ、アームシリンダ8内の作動油を作動油タンクへ排出するために作動油の流れを切り換えるスプール弁である。
左パラレル管路42Lは、左センターバイパス管路40Lに並行する作動油ラインである。左パラレル管路42Lは、制御弁171、173、及び175Lの何れかによって左センターバイパス管路40Lを通る作動油の流れが制限或いは遮断された場合に、より下流の制御弁に作動油を供給できる。右パラレル管路42Rは、右センターバイパス管路40Rに並行する作動油ラインである。右パラレル管路42Rは、制御弁172、174、及び175Rの何れかによって右センターバイパス管路40Rを通る作動油の流れが制限或いは遮断された場合に、より下流の制御弁に作動油を供給できる。
レギュレータ13は、左レギュレータ13L及び右レギュレータ13Rを含む。左レギュレータ13Lは、左メインポンプ14Lの吐出圧に応じて左メインポンプ14Lの斜板傾転角を調節することによって、左メインポンプ14Lの吐出量を制御するように構成されている。具体的には、左レギュレータ13Lは、例えば、左メインポンプ14Lの吐出圧の増大に応じて左メインポンプ14Lの斜板傾転角を調節して吐出量を減少させるように構成されている。右レギュレータ13Rについても同様である。吐出圧と吐出量との積で表されるメインポンプ14の吸収馬力がエンジン11の出力馬力を超えないようにするためである。
操作装置26は、左操作レバー26L、右操作レバー26R、及び走行レバー26Dを含む。走行レバー26Dは、左走行レバー26DL及び右走行レバー26DRを含む。
左操作レバー26Lは、旋回操作とアーム5の操作に用いられる。左操作レバー26Lは、前後方向(アーム開閉方向)に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁176のパイロットポートに導入させる。また、左操作レバー26Lは、左右方向(旋回方向)に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁173のパイロットポートに導入させる。
具体的には、左操作レバー26Lは、アーム閉じ方向に操作された場合に、制御弁176Lの右パイロットポートに作動油を導入させ、且つ、制御弁176Rの左パイロットポートに作動油を導入させる。また、左操作レバー26Lは、アーム開き方向に操作された場合には、制御弁176Lの左パイロットポートに作動油を導入させ、且つ、制御弁176Rの右パイロットポートに作動油を導入させる。また、左操作レバー26Lは、左旋回方向に操作された場合に、制御弁173の左パイロットポートに作動油を導入させ、右旋回方向に操作された場合に、制御弁173の右パイロットポートに作動油を導入させる。
右操作レバー26Rは、ブーム4の操作とバケット6の操作に用いられる。右操作レバー26Rは、前後方向(ブーム上下方向)に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁175のパイロットポートに導入させる。また、右操作レバー26Rは、左右方向(バケット開閉方向)に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁174のパイロットポートに導入させる。
具体的には、右操作レバー26Rは、ブーム下げ方向に操作された場合に、制御弁175Rの左パイロットポートに作動油を導入させる。また、右操作レバー26Rは、ブーム上げ方向に操作された場合には、制御弁175Lの右パイロットポートに作動油を導入させ、且つ、制御弁175Rの左パイロットポートに作動油を導入させる。また、右操作レバー26Rは、バケット閉じ方向に操作された場合に、制御弁174の右パイロットポートに作動油を導入させ、バケット開き方向に操作された場合に、制御弁174の左パイロットポートに作動油を導入させる。
走行レバー26Dは、クローラ1Cの操作に用いられる。具体的には、左走行レバー26DLは、左クローラ1CLの操作に用いられる。左走行レバー26DLは、左走行ペダルと連動するように構成されていてもよい。左走行レバー26DLは、前後方向に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁171のパイロットポートに導入させる。右走行レバー26DRは、右クローラ1CRの操作に用いられる。右走行レバー26DRは、右走行ペダルと連動するように構成されていてもよい。右走行レバー26DRは、前後方向に操作されると、パイロットポンプ15が吐出する作動油を利用し、レバー操作量に応じた制御圧を制御弁172のパイロットポートに導入させる。
吐出圧センサ28は、吐出圧センサ28L及び吐出圧センサ28Rを含む。吐出圧センサ28Lは、左メインポンプ14Lの吐出圧を検出し、検出した値をコントローラ30に対して出力する。吐出圧センサ28Rについても同様である。
操作圧センサ29は、操作圧センサ29LA、29LB、29RA、29RB、29DL、及び29DRを含む。操作圧センサ29LAは、操作者による左操作レバー26Lに対する前後方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。操作内容は、例えば、レバー操作方向、レバー操作量(レバー操作角度)等である。
同様に、操作圧センサ29LBは、操作者による左操作レバー26Lに対する左右方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。操作圧センサ29RAは、操作者による右操作レバー26Rに対する前後方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。操作圧センサ29RBは、操作者による右操作レバー26Rに対する左右方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。操作圧センサ29DLは、操作者による左走行レバー26DLに対する前後方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。操作圧センサ29DRは、操作者による右走行レバー26DRに対する前後方向への操作の内容を圧力の形で検出し、検出した値をコントローラ30に対して出力する。
コントローラ30は、操作圧センサ29の出力を受信し、必要に応じてレギュレータ13に対して制御指令を出力し、メインポンプ14の吐出量を変化させる。
ここで、絞り18と制御圧センサ19を用いたネガティブコントロール制御について説明する。絞り18は左絞り18L及び右絞り18Rを含み、制御圧センサ19は左制御圧センサ19L及び右制御圧センサ19Rを含む。
左センターバイパス管路40Lには、最も下流にある制御弁176Lと作動油タンクとの間に左絞り18Lが配置されている。そのため、左メインポンプ14Lが吐出した作動油の流れは、左絞り18Lで制限される。そして、左絞り18Lは、左レギュレータ13Lを制御するための制御圧を発生させる。左制御圧センサ19Lは、この制御圧を検出するためのセンサであり、検出した値をコントローラ30に対して出力する。コントローラ30は、この制御圧に応じて左メインポンプ14Lの斜板傾転角を調節することによって、左メインポンプ14Lの吐出量を制御する。コントローラ30は、この制御圧が大きいほど左メインポンプ14Lの吐出量を減少させ、この制御圧が小さいほど左メインポンプ14Lの吐出量を増大させる。右メインポンプ14Rの吐出量も同様に制御される。
具体的には、図3で示されるようにショベル100における油圧アクチュエータが何れも操作されていない待機状態の場合、左メインポンプ14Lが吐出する作動油は、左センターバイパス管路40Lを通って左絞り18Lに至る。そして、左メインポンプ14Lが吐出する作動油の流れは、左絞り18Lの上流で発生する制御圧を増大させる。その結果、コントローラ30は、左メインポンプ14Lの吐出量を許容最小吐出量まで減少させ、吐出した作動油が左センターバイパス管路40Lを通過する際の圧力損失(ポンピングロス)を抑制する。一方、何れかの油圧アクチュエータが操作された場合、左メインポンプ14Lが吐出する作動油は、操作対象の油圧アクチュエータに対応する制御弁を介して、操作対象の油圧アクチュエータに流れ込む。そして、左メインポンプ14Lが吐出する作動油の流れは、左絞り18Lに至る量を減少或いは消失させ、左絞り18Lの上流で発生する制御圧を低下させる。その結果、コントローラ30は、左メインポンプ14Lの吐出量を増大させ、操作対象の油圧アクチュエータに十分な作動油を流入させ、操作対象の油圧アクチュエータの駆動を確かなものとする。なお、コントローラ30は、右メインポンプ14Rの吐出量も同様に制御する。
上述のような構成により、図3の油圧システムは、待機状態においては、メインポンプ14における無駄なエネルギ消費を抑制できる。無駄なエネルギ消費は、メインポンプ14が吐出する作動油がセンターバイパス管路40で発生させるポンピングロスを含む。また、図3の油圧システムは、油圧アクチュエータを作動させる場合には、メインポンプ14から必要十分な作動油を作動対象の油圧アクチュエータに確実に供給できる。
制御弁60は、操作装置26の有効状態と無効状態とを切り換えるように構成されている。本実施形態では、制御弁60は、電磁弁であり、コントローラ30からの電流指令に応じて動作するように構成されている。操作装置26の有効状態は、操作者が操作装置26を操作することで関連する被駆動体を動かすことができる状態であり、操作装置26の無効状態は、操作者が操作装置26を操作しても関連する被駆動体を動かすことができない状態である。
本実施形態では、制御弁60は、パイロットポンプ15と操作装置26とを繋ぐパイロットラインCD1の連通状態と遮断状態とを切り換え可能なスプール式の電磁弁である。具体的には、制御弁60は、コントローラ30からの指令に応じてパイロットラインCD1の連通状態と遮断状態とを切り換えるように構成されている。より具体的には、制御弁60は、第1弁位置になったときにパイロットラインCD1を連通状態とし、第2弁位置になったときにパイロットラインCD1を遮断状態とする。図3は、制御弁60が第1弁位置となっていること、及び、パイロットラインCD1が連通状態となっていることを示している。
制御弁60は、不図示のゲートロックレバーに連動するように構成されていてもよい。具体的には、制御弁60は、ゲートロックレバーが押し下げられたときにパイロットラインCD1を遮断状態にし、ゲートロックレバーが引き上げられたときにパイロットラインCD1を連通状態にするように構成されていてもよい。
次に、図4及び図5を参照し、コントローラ30が制御弁60を用いてショベル100の駆動部を自動的に制動させる処理(以下、「自動制動処理」とする。)について説明する。図4は、斜面で作業しているショベル100の側面図である。図5は、自動制動処理の一例のフローチャートである。コントローラ30は、例えば、所定の制御周期で繰り返しこの自動制動処理を実行する。
図4の例では、ショベル100は、物体検知装置70により、斜面に停車しているダンプトラックDPを検知している。そして、ショベル100は、ダンプトラックDPの荷台に土砂を積み込む作業を行うため、後進しながらダンプトラックDPに接近している。コントローラ30は、後センサ70Bの出力に基づいてショベル100(カウンタウェイト)とダンプトラックDPとの間の距離DAを継続的に監視している。コントローラ30は、ミリ波センサ等の距離センサの出力に基づいて距離DAを継続的に監視するように構成されていてもよい。ショベル100の操作者は、通常、距離DAが所望の距離になったところで、走行レバー26Dを中立位置に戻してショベル100の後進を停止させようとする。
しかしながら、ショベル100の操作者は、距離DAが所望の距離になったことに気付かずにショベル100の後進を継続させてしまう場合がある。
そこで、コントローラ30は、距離DAが所定の第1閾値TH1を下回った場合、制御弁60に対して電流指令を出力する。本実施形態では、制御弁60は、電流指令値がゼロのときに第1弁位置となり、電流指令値が所定の上限値Amaxのときに第2弁位置となるように構成されている。すなわち、制御弁60は、電流指令値が上限値Amaxのときに操作装置26が無効状態となるように構成されている。これは、電流指令値が大きくなるほど制動力が大きくなることを意味する。具体的には、コントローラ30は、距離DAが第1閾値TH1を下回った場合、制御弁60に対して電流指令を出力して走行レバー26Dを無効状態にする。そのため、距離DAが第1閾値TH1を下回った場合、制御弁171及び制御弁172は中立弁位置に戻り、メインポンプ14から走行用油圧モータ2Mに向かう作動油の流れが遮断される。その結果、走行用油圧モータ2Mは回転を停止し、ショベル100の後進は停止する。
コントローラ30は、例えば、物体検知装置70が検知するカウンタウェイトとダンプトラックDPとの間の距離DAに対応する、複数の制動パターンのうちの1つにしたがって駆動部としての走行用油圧モータ2Mを制動させる。
具体的には、コントローラ30は、最初に、降坂中であるか否かを判定する(ステップST1)。本実施形態では、コントローラ30は、操作圧センサ29、機体傾斜センサS4、及び向き検出装置85のそれぞれの出力に基づき、降坂中であるか否かを判定する。降坂中は、後進降坂中及び前進降坂中を含む。コントローラ30は、カメラ等が撮像した画像に基づいて降坂中であるか否かを判定してもよい。
降坂中でないと判定した場合(ステップST1のNO)、コントローラ30は、今回の自動制動処理を終了させる。
降坂中であると判定した場合(ステップST1のYES)、コントローラ30は、ショベル100(例えばカウンタウェイト)とダンプトラックDPとの間の距離DAが第1閾値TH1を下回ったか否かを判定する(ステップST2)。
距離DAが第1閾値TH1以上であると判定した場合(ステップST2のNO)、コントローラ30は、今回の自動制動処理を終了させる。
距離DAが第1閾値TH1未満であると判定した場合(ステップST2のYES)、コントローラ30は、制動パターンを選択する(ステップST3)。制動パターンは、降坂角(下り坂の勾配)の大きさに応じて複数用意されている。複数の制動パターンは、例えば、降坂角が大きいほど制動力の単位時間当たり増加率が大きくなるように設定されていてもよい。或いは、複数の制動パターンは、例えば、降坂角が大きいほど制動が早く開始されるように設定されていてもよい。本実施形態では、制動パターンは、距離DAと制御弁60に対する電流指令値との対応関係を表すパターンである。コントローラ30は、水平面に関する下部走行体1の前後軸の傾斜角に対応する制動パターンを選択する。
その後、コントローラ30は、選択した制動パターンにしたがって走行用油圧モータ2Mを制動させる(ステップST4)。本実施形態では、コントローラ30は、選択した制動パターンによって決まる大きさの電流指令を制御弁60に対して出力することで、走行レバー26Dが生成しているパイロット圧を低減させる。そのため、左走行用油圧モータ2MLに対応する制御弁171は中立弁位置に向かって移動し、左メインポンプ14Lから左走行用油圧モータ2MLに向かう作動油の流れは制限され、最終的に遮断される。同様に、右走行用油圧モータ2MRに対応する制御弁172は中立弁位置に向かって移動し、右メインポンプ14Rから右走行用油圧モータ2MRに向かう作動油の流れは制限され、最終的に遮断される。その結果、走行用油圧モータ2Mの回転は抑制され、最終的に停止し、下部走行体1の降坂は止まる。
それでもなお降坂が継続され、距離DAが第1閾値TH1よりも小さい第2閾値TH2を下回った場合、コントローラ30は、メカニカルブレーキを作動させて走行用油圧モータ2Mの回転を停止させてもよい。
次に、図6及び図7を参照し、走行中に選択される制動パターンの例について説明する。図6は、距離DAと電流指令値との対応関係で表される制動パターンの例を示す。図6の実線は、ショベル100が降坂しているときに選択される制動パターンBP1を示し、破線は、ショベル100が平地を走行しているときに選択される制動パターンBP2を示す。この例では、比較を容易にするため、降坂中のショベル100と平地走行中のショベル100とは、同時並行的に、且つ、同じ一定の速度で走行している。そして、2台のショベル100のそれぞれは、選択された制動パターンにしたがった自動制動処理により、走行停止時の距離DAがほぼ同じになるように制御される。図7は、図6の制動パターンを用いて走行用油圧モータ2Mを制動させたときに、制御弁60に実際に供給される電流の時間的推移を示す。図7の実線は、図6の実線で示す制動パターンBP1が選択されたときの電流(実際値)の時間的推移を示し、破線は、図6の破線で示す制動パターンBP2が選択されたときの電流(実際値)の時間的推移を示す。
図6の実線で示すように、ショベル100が降坂している場合には、コントローラ30は、距離DAが、降坂の際に設定される第1閾値TH1としての距離D1を下回ると、制御弁60に対する電流指令値を増加させる。距離D1は、例えば8メートルである。この例では、電流指令値は、距離DAが距離D2になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP1が選択された場合、制御弁60に供給される実際の電流は、図7の実線で示すように、距離DAが距離D1を下回った時点である時点t0で増加し始め、時点t1で上限値Amaxに達する。このような制動パターンBP1を用いた自動制動処理により、コントローラ30は、時点t4において、物体(例えばダンプトラックDP)から距離D5のところで降坂中のショベル100の走行を停止させることができる。
また、図6の破線で示すように、ショベル100が平地を走行している場合には、コントローラ30は、距離DAが、平地走行の際に設定される第1閾値TH1としての距離D3(<D1)を下回ると、制御弁60に対する電流指令値を増加させる。距離D3は、例えば5メートルである。この例では、電流指令値は、距離DAが距離D4になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP2が選択された場合、制御弁60に供給される実際の電流は、図7の破線で示すように、距離DAが距離D3を下回った時点である時点t2で増加し始め、時点t3で上限値Amaxに達する。すなわち、コントローラ30は、制動パターンBP1が選択された場合よりも遅いタイミングで走行用油圧モータ2Mの制動を開始させる。このような制動パターンBP2を用いた自動制動処理により、コントローラ30は、降坂中のショベル100の場合と同様に、時点t4において、物体(例えばダンプトラックDP)から距離D5のところで平地でのショベル100の走行を停止させることができる。
上述の例では、制動パターンBP1における電流指令値の増加率は、制動パターンBP2における電流指令値の増加率に等しい。但し、制動パターンBP1における電流指令値の増加率は、制動パターンBP2における電流指令値の増加率とは異なるように設定されていてもよい。この場合、制動パターンBP1における制動開始タイミングは、制動パターンBP2における制動開始タイミングと同じであってもよい。
次に、図8及び図9を参照し、走行中に選択される制動パターンの別の例について説明する。図8は、距離DAと電流指令値との対応関係で表される制動パターンの別の例を示し、図6に対応する。図8の実線は、急勾配の坂道をショベル100が降坂しているときに選択される制動パターンBP11を示し、一点鎖線は、緩勾配の坂道をショベル100が降坂しているときに選択される制動パターンBP12を示し、破線は、ショベル100が平地を走行しているときに選択される制動パターンBP13を示す。この例では、比較を容易にするため、降坂中のショベル100と平地走行中のショベル100とは、同時並行的に、且つ、同じ一定の速度で走行している。そして、3台のショベル100のそれぞれは、選択された制動パターンにしたがった自動制動処理により、走行停止時の距離DAがほぼ同じになるように制御される。図9は、図8の制動パターンを用いて走行用油圧モータ2Mを制動させたときに、制御弁60に実際に供給される電流の時間的推移を示す。図9の実線は、図8の実線で示す制動パターンBP11が選択されたときの電流(実際値)の時間的推移を示し、一点鎖線は、図8の一点鎖線で示す制動パターンBP12が選択されたときの電流(実際値)の時間的推移を示し、破線は、図8の破線で示す制動パターンBP13が選択されたときの電流(実際値)の時間的推移を示す。
図8の実線で示すように、急勾配の坂道をショベル100が降坂している場合には、コントローラ30は、距離DAが、急勾配の坂道の降坂の際に設定される第1閾値TH1としての距離D11を下回ると、制御弁60に対する電流指令値を増加させる。距離D11は、例えば8メートルである。この例では、電流指令値は、距離DAが距離D14になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP11が選択された場合、制御弁60に供給される実際の電流は、図9の実線で示すように、距離DAが距離D11を下回った時点である時点t10で増加し始め、時点t13で上限値Amaxに達する。このような制動パターンBP11を用いた自動制動処理により、コントローラ30は、時点t14において、物体(例えばダンプトラックDP)から距離D15のところで降坂中のショベル100の走行を停止させることができる。
また、図8の一点鎖線で示すように、緩勾配の坂道をショベル100が降坂している場合には、コントローラ30は、距離DAが、緩勾配の坂道の降坂の際に設定される第1閾値TH1としての距離D12(<D11)を下回ると、制御弁60に対する電流指令値を増加させる。距離D12は、例えば6.5メートルである。この例では、電流指令値は、距離DAが距離D14になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP12が選択された場合、制御弁60に供給される実際の電流は、図9の一点鎖線で示すように、距離DAが距離D12を下回った時点である時点t11で増加し始め、時点t13で上限値Amaxに達する。すなわち、コントローラ30は、制動パターンBP11が選択された場合よりも遅いタイミングで走行用油圧モータ2Mの制動を開始させる。このような制動パターンBP12を用いた自動制動処理により、コントローラ30は、時点t14において、物体(例えばダンプトラックDP)から距離D15のところで降坂中のショベル100の走行を停止させることができる。
また、図8の破線で示すように、ショベル100が平地を走行している場合には、コントローラ30は、距離DAが、平地走行の際に設定される第1閾値TH1としての距離D13(<D12)を下回ると、制御弁60に対する電流指令値を増加させる。距離D13は、例えば5メートルである。この例では、電流指令値は、距離DAが距離D14になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP13が選択された場合、制御弁60に供給される実際の電流は、図9の破線で示すように、距離DAが距離D13を下回った時点である時点t12で増加し始め、時点t13で上限値Amaxに達する。すなわち、コントローラ30は、制動パターンBP12が選択された場合よりも遅いタイミングで走行用油圧モータ2Mの制動を開始させる。このような制動パターンBP13を用いた自動制動処理により、コントローラ30は、急勾配の坂道を降坂中のショベル100の場合、及び、緩勾配の坂道を降坂中のショベル100の場合と同様に、時点t14において、物体(例えばダンプトラックDP)から距離D15のところで平地でのショベル100の走行を停止させることができる。
上述の例では、制動パターンBP11で電流指令値が上限値Amaxに達するタイミングは、制動パターンBP12で電流指令値が上限値Amaxに達するタイミング、及び、制動パターンBP13で電流指令値が上限値Amaxに達するタイミングに等しい。但し、電流指令値が上限値Amaxに達するタイミングは、制動パターン毎に異なっていてもよい。
次に、図10A1、図10A2、図10B1、及び図10B2を参照し、旋回動作について説明する。図10A1及び図10A2は、ショベル100の側面図であり、図10B1及び図10B2はショベル100の上面図である。また、図10A1及び図10B1は、平地で旋回動作を行っているときの状態を示し、図10A2及び図10B2は、傾斜地で降り旋回動作を行っているときの状態を示す。また、図10A1、図10A2、図10B1、及び図10B2のそれぞれにおける実線矢印は旋回用油圧モータ2Aによる旋回力が作用する方向を示し、点線矢印は上部旋回体3の自重による旋回力が作用する方向を示す。
図10A2及び図10B2の例では、アーム5を大きく開いた状態にあるため、掘削アタッチメントを含めた上部旋回体3の重心は旋回軸SAよりも前方にある。すなわち、掘削アタッチメントを含めた上部旋回体3の重心は、旋回軸SAよりも上部旋回体3の後端から遠い位置にある。そのため、ショベル100が傾斜地に位置する場合、上部旋回体3は、自重により、バケット6が低い位置に向かうように旋回しようとする。しかしながら、ショベル100が傾斜地に位置する場合であって、掘削アタッチメントを含めた上部旋回体3の重心が旋回軸SAよりも後方にある場合、すなわち、旋回軸SAよりも上部旋回体3の後端に近い位置にある場合には、上部旋回体3は、自重により、カウンタウェイトが低い位置に向かうように旋回しようとする。
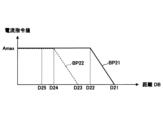
次に、図11及び図12を参照し、旋回動作中に選択される制動パターンの例について説明する。この例では、コントローラ30は、平地での旋回動作中に物体検知装置70が検知するバケット6と物体OB(図10B1参照。)との距離DBに応じた複数の制動パターンのうちの1つにしたがって駆動部としての旋回用油圧モータ2Aを制動させる。距離DBは、例えば図10B1に示すように、旋回動作中にバケット6が描く旋回円CRにおけるバケット6と物体OBとの間の弧の長さである。図11は、距離DBと電流指令値との対応関係で表される制動パターンの例を示し、図6に対応する。図11の実線は、比較的大きい旋回半径でショベル100が旋回動作を行っているときに選択される制動パターンBP21を示し、破線は、比較的小さい旋回半径でショベル100が旋回動作を行っているときに選択される制動パターンBP22を示す。旋回半径は、例えば、ブーム角度センサS1、アーム角度センサS2、及びバケット角度センサS3のそれぞれの出力に基づいて算出される。この例では、比較を容易にするため、比較的大きい旋回半径で旋回動作を行っているショベル100と比較的小さい旋回半径で旋回動作を行っているショベル100とは、同時並行的に、且つ、同じ一定の旋回速度で旋回している。そして、2台のショベル100は、選択された制動パターンにしたがった自動制動処理により、旋回停止時の距離DBがほぼ同じになるように制御される。図12は、図12(A)及び図12(B)を含む。図12(A)は、図11の制動パターンを用いて旋回用油圧モータ2Aを制動させたときの制御弁60のストローク量の時間的推移を示す。図12(B)は、図11の制動パターンを用いて旋回用油圧モータ2Aを制動させたときに、制御弁60に実際に供給される電流の時間的推移を示す。具体的には、図12の実線は、図11の実線で示す制動パターンBP21が選択されたときの時間的推移を示し、破線は、図11の破線で示す制動パターンBP22が選択されたときの時間的推移を示す。
図11の実線で示すように、平地に位置するショベル100が比較的大きい旋回半径で旋回動作を行っている場合には、コントローラ30は、距離DBが、比較的大きい旋回半径での旋回の際に設定される第3閾値TH3としての距離D21を下回ると、制御弁60に対する電流指令値を増加させる。距離D21は、例えば5メートルである。この例では、電流指令値は、距離DBが距離D22になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP21が選択された場合、制御弁60に供給される実際の電流は、図12(B)の実線で示すように、距離DBが距離D21を下回った時点である時点t21で増加し始め、時点t22で上限値Amaxに達する。そして、制御弁60のストローク量は、図12(A)の実線で示すように、時点t21で減少し始め、時点t22で下限値Sminに達する。すなわち、制御弁60が設置されているパイロットラインCD1は遮断状態となる。このような制動パターンBP21を用いた自動制動処理により、コントローラ30は、時点t25において、物体OBから距離D25のところでショベル100の旋回動作を停止させることができる。
また、図11の破線で示すように、平地に位置するショベル100が比較的小さい旋回半径で旋回動作を行っている場合には、コントローラ30は、距離DBが、比較的小さい旋回半径での旋回の際に設定される第3閾値TH3としての距離D23(<D21)を下回ると、制御弁60に対する電流指令値を増加させる。距離D23は、例えば3メートルである。この例では、電流指令値は、距離DBが距離D24になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP22が選択された場合、制御弁60に供給される実際の電流は、図12(B)の破線で示すように、距離DBが距離D23を下回った時点である時点t23で増加し始め、時点t24で上限値Amaxに達する。そして、制御弁60のストローク量は、図12(A)の破線で示すように、時点t23で減少し始め、時点t24で下限値Sminに達する。すなわち、制御弁60が設置されているパイロットラインCD1は遮断状態となる。このような制動パターンBP22を用いた自動制動処理により、コントローラ30は、比較的大きい旋回半径で旋回動作を行っているショベル100の場合と同様に、時点t25において、物体OBから距離D25のところでショベル100の旋回動作を停止させることができる。
この構成により、コントローラ30は、旋回半径の大きさにかかわらず、すなわち、掘削アタッチメントの姿勢にかかわらず、旋回用油圧モータ2Aを適切に自動停止させることができる。例えば、距離DBが距離D25となるところでショベル100の旋回動作を停止させることができる。
上述の例では、制動パターンBP21における電流指令値の増加率は、制動パターンBP22における電流指令値の増加率に等しい。但し、制動パターンBP21における電流指令値の増加率は、制動パターンBP22における電流指令値の増加率とは異なるように設定されていてもよい。この場合、制動パターンBP21における制動開始タイミングは、制動パターンBP22における制動開始タイミングと同じであってもよい。
次に、図13及び図14を参照し、旋回動作中に選択される制動パターンの別の例について説明する。この例では、コントローラ30は、旋回動作中に物体検知装置70が検知するバケット6と物体OB(図10B1及び図10B2参照。)との距離DBに応じた複数の制動パターンのうちの1つにしたがって駆動部としての旋回用油圧モータ2Aを制動させる。距離DBは、例えば図10B1及び図10B2のそれぞれに示すように、旋回動作中にバケット6が描く旋回円CRにおけるバケット6と物体OBとの間の弧の長さである。図13は、距離DBと電流指令値との対応関係で表される制動パターンを示し、図6に対応する。図13の実線は、ショベル100が降り旋回動作を行っているときに選択される制動パターンBP31を示し、破線は、ショベル100が平地で旋回動作を行っているときに選択される制動パターンBP32を示す。この例では、比較を容易にするため、降り旋回動作を行っているショベル100と平地で旋回動作を行っているショベル100とは、同時並行的に、且つ、同じ一定の旋回速度で旋回している。そして、2台のショベル100のそれぞれは、選択された制動パターンにしたがった自動制動処理により、旋回停止時の距離DBがほぼ同じになるように制御される。図14は、図14(A)及び図14(B)を含む。図14(A)は、図13の制動パターンを用いて旋回用油圧モータ2Aを制動させたときの制御弁60のストローク量の時間的推移を示す。図14(B)は、図13の制動パターンを用いて旋回用油圧モータ2Aを制動させたときに、制御弁60に実際に供給される電流の時間的推移を示す。図14の実線は、図13の実線で示す制動パターンBP31が選択されたときの時間的推移を示し、破線は、図13の破線で示す制動パターンBP32が選択されたときの時間的推移を示す。
図13の実線で示すように、ショベル100が降り旋回動作を行っている場合には、コントローラ30は、距離DBが、降り旋回動作の際に設定される第3閾値TH3としての距離D31を下回ると、制御弁60に対する電流指令値を増加させる。距離D31は、例えば5メートルである。この例では、電流指令値は、距離DBが距離D32になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP31が選択された場合、制御弁60に供給される実際の電流は、図14(B)の実線で示すように、距離DBが距離D31を下回った時点である時点t31で増加し始め、時点t32で上限値Amaxに達する。そして、制御弁60のストローク量は、図14(A)の実線で示すように、時点t31で減少し始め、時点t32で下限値Sminに達する。すなわち、制御弁60が設置されているパイロットラインCD1は遮断状態となる。このような制動パターンBP31を用いた自動制動処理により、コントローラ30は、時点t25において、物体OBから距離D35のところでショベル100の降り旋回動作を停止させることができる。
また、図13の破線で示すように、ショベル100が平地で旋回動作を行っている場合には、コントローラ30は、距離DBが、平地での旋回動作の際に設定される第3閾値TH3としての距離D33(<D31)を下回ると、制御弁60に対する電流指令値を増加させる。距離D33は、例えば3メートルである。この例では、電流指令値は、距離DBが距離D34になるときに上限値Amaxとなるように、所定の単位時間当たり増加率又は所定の単位距離当たり増加率で増加するように設定されている。制動パターンBP32が選択された場合、制御弁60に供給される実際の電流は、図14(B)の破線で示すように、距離DBが距離D33を下回った時点である時点t33で増加し始め、時点t34で上限値Amaxに達する。そして、制御弁60のストローク量は、図14(A)の破線で示すように、時点t33で減少し始め、時点t34で下限値Sminに達する。すなわち、制御弁60が設置されているパイロットラインCD1は遮断状態となる。このような制動パターンBP32を用いた自動制動処理により、コントローラ30は、降り旋回動作中のショベル100の場合と同様に、時点t25において、物体OBから距離D25のところでショベル100の平地での旋回動作を停止させることができる。
上述の例では、制動パターンBP31における電流指令値の増加率は、制動パターンBP32における電流指令値の増加率に等しい。但し、制動パターンBP31における電流指令値の増加率は、制動パターンBP32における電流指令値の増加率とは異なるように設定されていてもよい。この場合、制動パターンBP31における制動開始タイミングは、制動パターンBP32における制動開始タイミングと同じであってもよい。
次に、図15を参照し、ショベル100に搭載される油圧システムの別の構成例について説明する。図15は、ショベル100に搭載される油圧システムの別の構成例を示す概略図である。図15の油圧システムは、制動の対象となるアクチュエータに関するスプール弁を所定の制動パターンにしたがって動かすことで、アクチュエータを滑らかに減速させ、或いは、停止させることができる点で、図3の油圧システムと異なるが、その他の点で共通する。そのため、共通部分の説明を省略し、相違部分を詳説する。
図15の油圧システムは、制御弁60A~60Fを含む。本実施形態では、制御弁60Aは、パイロットポンプ15と左操作レバー26Lにおけるアーム操作に関する部分とを繋ぐパイロットラインCD11の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Aは、コントローラ30からの指令に応じてパイロットラインCD11の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60Bは、パイロットポンプ15と左操作レバー26Lにおける旋回操作に関する部分とを繋ぐパイロットラインCD12の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Bは、コントローラ30からの指令に応じてパイロットラインCD12の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60Cは、パイロットポンプ15と左走行レバー26DLとを繋ぐパイロットラインCD13の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Cは、コントローラ30からの指令に応じてパイロットラインCD13の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60Dは、パイロットポンプ15と右操作レバー26Rにおけるブーム操作に関する部分とを繋ぐパイロットラインCD14の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Dは、コントローラ30からの指令に応じてパイロットラインCD14の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60Eは、パイロットポンプ15と右操作レバー26Rにおけるバケット操作に関する部分とを繋ぐパイロットラインCD15の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Eは、コントローラ30からの指令に応じてパイロットラインCD15の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60Fは、パイロットポンプ15と右走行レバー26DRとを繋ぐパイロットラインCD16の連通状態と遮断状態とを切り換え可能な電磁弁である。具体的には、制御弁60Fは、コントローラ30からの指令に応じてパイロットラインCD16の連通状態と遮断状態とを切り換えるように構成されている。
制御弁60A~60Fは、ゲートロックレバーに連動するように構成されていてもよい。具体的には、制御弁60A~60Fは、ゲートロックレバーが押し下げられたときにパイロットラインCD11~CD16を遮断状態にし、ゲートロックレバーが引き上げられたときにパイロットラインCD11~CD16を連通状態にするように構成されていてもよい。
この構成により、コントローラ30は、左操作レバー26Lにおけるアーム操作に関する部分及び旋回操作に関する部分、右操作レバー26Rにおけるブーム操作に関する部分及びバケット操作に関する部分、左走行レバー26DL、並びに、右走行レバー26DRのそれぞれに対応するアクチュエータに関するスプール弁を所定の制動パターンにしたがって動かすことで、アクチュエータを滑らかに減速させ、或いは、停止させることができる。
そのため、コントローラ30は、複合操作が行われた場合であっても、ショベル100を適切に動作させることができる。例えば、コントローラ30は、複合操作のうちの1つの操作に応じた1つの被駆動体の動きを許容しながら、複合操作のうちの別の1つの操作に応じた別の1つの被駆動体の動きを制動してもよい。或いは、コントローラ30は、複合操作のうちの1つの操作に応じた1つの被駆動体の動きを制動した場合には、複合操作のうちの他の操作に応じた他の被駆動体の動きも制動するように構成されていてもよい。
次に、図16A及び図16Bを参照し、ショベル100の別の構成例について説明する。図16A及び図16Bは、ショベル100の別の構成例を示す図であり、図16Aが側面図を示し、図16Bが上面図を示す。
図16A及び図16Bのショベルは、撮像装置80を搭載している点で、図1及び図2に示すショベル100と異なるが、その他の点で共通する。そのため、共通部分の説明を省略し、相違部分を詳説する。
撮像装置80は、周囲監視装置の別の一例であり、ショベル100の周囲を撮像するように構成されている。ショベル100は、必ずしも、物体検知装置70及び撮像装置80の両方を周囲監視装置として備えている必要はない。周囲監視装置は、物体検知装置70により周囲の物体とショベル100との位置関係を把握できるのであれば、物体検知装置70のみで構成されていてもよく、撮像装置80により周囲の物体とショベル100との位置関係を把握できるのであれば、撮像装置80のみで構成されていてもよい。図16A及び図16Bの例では、撮像装置80は、上部旋回体3の上面後端に取り付けられた後カメラ80B、上部旋回体3の上面左端に取り付けられた左カメラ80L、及び、上部旋回体3の上面右端に取り付けられた右カメラ80Rを含む。撮像装置80は、前カメラを含んでいてもよい。
後カメラ80Bは後センサ70Bに隣接して配置され、左カメラ80Lは左センサ70Lに隣接して配置され、且つ、右カメラ80Rは右センサ70Rに隣接して配置されている。撮像装置80が前カメラを含む場合、前カメラは、前センサ70Fに隣接して配置されていてもよい。
撮像装置80が撮像した画像は、キャビン10内に設置されている表示装置DSに表示される。撮像装置80は、俯瞰画像等の視点変換画像を表示装置DSに表示できるように構成されていてもよい。俯瞰画像は、例えば、後カメラ80B、左カメラ80L、及び右カメラ80Rのそれぞれが出力する画像を合成して生成される。
この構成により、図16A及び図16Bのショベル100は、物体検知装置70が検知した物体の画像を表示装置DSに表示できる。そのため、ショベル100の操作者は、被駆動体の動作が制限或いは禁止された場合、表示装置DSに表示されている画像を見ることで、その原因となった物体が何であるかをすぐに確認できる。
上述の通り、本発明の実施形態に係るショベル100は、下部走行体1と、下部走行体1に旋回自在に搭載された上部旋回体3と、上部旋回体3に設けられた物体検知装置70と、ショベル100の駆動部を自動的に制動させることができる制御装置としてのコントローラ30と、を備えている。ショベル100の駆動部は、例えば、走行用油圧モータ2M及び旋回用油圧モータ2A等の少なくとも1つを含む。走行用油圧モータ2Mは、走行用電動モータであってもよい。また、旋回用油圧モータ2Aは、旋回用電動モータであってもよい。コントローラ30は、例えば、物体検知装置70が検知するショベル100と物体との間の距離に応じた複数の制動パターンのうちの1つにしたがって駆動部を自動的に制動させてもよい。コントローラ30は、例えば図4に示すように、ショベル100とダンプトラックDPとの間の距離DAに応じた複数の制動パターンのうちの1つにしたがって走行用油圧モータ2Mを自動的に制動させてもよい。また、コントローラ30は、例えば図10B1に示すように、ショベル100と物体OBとの間の距離DBに応じた複数の制動パターンのうちの1つにしたがって旋回用油圧モータ2Aを自動的に制動させてもよい。この構成により、コントローラ30は、ショベル100をより適切に自動停止させることができる。コントローラ30は、例えば、平地走行中のショベル100を自動停止させる場合と同様に、降坂中のショベル100を自動停止させることができる。そのため、コントローラ30は、平地走行中のショベル100を自動停止させる場合に比べて制動距離を著しく増加させてしまうことはない。その結果、コントローラ30は、降坂中のショベル100が物体と接触する前にショベル100を確実に停止させることができる。
複数の制動パターンのそれぞれは、例えば、制動開始タイミングが異なるように設定されていてもよい。具体的には、複数の制動パターンのそれぞれは、図6に示す制動パターンBP1及び制動パターンBP2のように、制動開始タイミングが異なるように設定されていてもよい。なお、制動パターンBP1では、距離DAが第1閾値TH1としての距離D1を下回ったときに制動が開始され、制動パターンBP2では、距離DAが第1閾値TH1としての距離D3(<D1)を下回ったときに制動が開始される。
複数の制動パターンのそれぞれは、制動が開始された後の経過時間に対する制動力の増加率が異なるように設定されていてもよい。具体的には、複数の制動パターンのそれぞれは、図8に示す制動パターンBP11~BP13のように、電流指令値の単位時間当たり増加率又は単位距離当たり増加率が異なるように設定されていてもよい。なお、図8の例では、制動パターンBP11に関する電流指令値の単位時間当たり増加率は、制動パターンBP12に関する電流指令値の単位時間当たり増加率より小さい。また、制動パターンBP12に関する電流指令値の単位時間当たり増加率は、制動パターンBP13に関する電流指令値の単位時間当たり増加率より小さい。
ショベル100は、ショベル100の傾斜を検出する機体傾斜センサS4を備えていてもよい。この場合、コントローラ30は、機体傾斜センサS4の出力に基づいて制動パターンを切り換えるように構成されていてもよい。この構成により、コントローラ30は、坂の勾配の大きさに応じて制動パターンを切り換えることができる。そのため、コントローラ30は、坂の勾配の大きさにかかわらず、降坂中のショベル100の走行を適切に停止させることができる。また、コントローラ30は、坂の勾配の大きさにかかわらず、降り旋回動作中のショベル100の旋回を適切に停止させることができる。
制動パターンは、例えば、走行用アクチュエータの制動パターンであってもよい。走行用アクチュエータは、例えば、走行用油圧モータ2Mであってもよく、走行用電動モータであってもよい。また、制動パターンは、例えば、旋回用アクチュエータの制動パターンであってもよい。旋回用アクチュエータは、例えば、旋回用油圧モータ2Aであってもよく、旋回用電動モータであってもよい。
物体検知装置70が検知する距離は、例えば、旋回動作中にエンドアタッチメントが描く旋回円におけるエンドアタッチメントと物体との間の弧の長さであってもよい。具体的には、図10B1に示すように、物体検知装置70が検知する距離DBは、旋回動作中にバケット6が描く旋回円CRにおけるバケット6と物体OBとの間の弧の長さであってもよい。この構成により、コントローラ30は、旋回軌道上に存在する物体OBとバケット6との距離DBに応じた複数の制動パターンのうちの1つにしたがって旋回用アクチュエータを自動的に制動させることができる。
コントローラ30は、旋回モーメントの大きさに応じた複数の制動パターンのうちの1つにしたがって駆動部を自動的に制動させるように構成されていてもよい。具体的には、コントローラ30は、例えば図11に示すように、ショベル100の旋回半径に応じて制動パターンBP21と制動パターンBP22とを切り換えるように構成されていてもよい。旋回モーメントは、旋回半径の変化に応じて変化するためである。具体的には、旋回モーメントは、旋回半径が大きいほど大きくなるためである。この構成により、コントローラ30は、旋回半径の大きさに応じて制動パターンを切り換えることができる。そのため、旋回半径の大きさにかかわらず、ショベル100の旋回を適切に停止させることができる。
次に、図17A~図17Dを参照し、ショベル100の更に別の構成例について説明する。図17A及び図17Cはショベル100の側面図であり、図17B及び図17Dはショベル100の上面図である。図17Aは、参照符号及び補助線等を除けば、図17Cと同じ図であり、図17Bは、参照符号及び補助線等を除けば、図17Dと同じ図である。
図17A~図17Dの例では、物体検知装置70は、周囲監視装置の一例であり、上部旋回体3の上面後端に取り付けられたLIDARである後センサ70B及び後上センサ70UB、キャビン10の上面前端に取り付けられたLIDARである前センサ70F及び前上センサ70UF、上部旋回体3の上面左端に取り付けられたLIDARである左センサ70L及び左上センサ70UL、並びに、上部旋回体3の上面右端に取り付けられたLIDARである右センサ70R及び右上センサ70URを含む。
後センサ70Bは、ショベル100の後方且つ斜め下方に存在する物体を検知するように構成されている。後上センサ70UBは、ショベル100の後方且つ斜め上方に存在する物体を検知するように構成されている。前センサ70Fは、ショベル100の前方且つ斜め下方に存在する物体を検知するように構成されている。前上センサ70UFは、ショベル100の前方且つ斜め上方に存在する物体を検知するように構成されている。左センサ70Lは、ショベル100の左方且つ斜め下方に存在する物体を検知するように構成されている。左上センサ70ULは、ショベル100の左方且つ斜め上方に存在する物体を検知するように構成されている。右センサ70Rは、ショベル100の右方且つ斜め下方に存在する物体を検知するように構成されている。右上センサ70URは、ショベル100の右方且つ斜め上方に存在する物体を検知するように構成されている。
図17A~図17Dの例では、撮像装置80は、周囲監視装置の別の一例であり、上部旋回体3の上面後端に取り付けられた後カメラ80B及び後上カメラ80UB、キャビン10の上面前端に取り付けられた前カメラ80F及び前上カメラ80UF、上部旋回体3の上面左端に取り付けられた左カメラ80L及び左上カメラ80UL、並びに、上部旋回体3の上面右端に取り付けられた右カメラ80R及び右上カメラ80URを含む。
後カメラ80Bは、ショベル100の後方且つ斜め下方を撮像するように構成されている。後上カメラ80UBは、ショベル100の後方且つ斜め上方を撮像するように構成されている。前カメラ80Fは、ショベル100の前方且つ斜め下方を撮像するように構成されている。前上カメラ80UFは、ショベル100の前方且つ斜め上方を撮像するように構成されている。左カメラ80Lは、ショベル100の左方且つ斜め下方を撮像するように構成されている。左上カメラ80ULは、ショベル100の左方且つ斜め上方を撮像するように構成されている。右カメラ80Rは、ショベル100の右方且つ斜め下方を撮像するように構成されている。右上カメラ80URは、ショベル100の右方且つ斜め上方を撮像するように構成されている。
具体的には、図17Aに示すように、後カメラ80Bは、光軸を表す仮想線である破線M1が旋回軸Kに垂直な仮想平面(図17Aの例では仮想水平面)に対して角度(俯角)φ1を形成するように構成されている。後上カメラ80UBは、光軸を表す仮想線である破線M2が旋回軸Kに垂直な仮想平面に対して角度(仰角)φ2を形成するように構成されている。前カメラ80Fは、光軸を表す仮想線である破線M3が旋回軸Kに垂直な仮想平面に対して角度(俯角)φ3を形成するように構成されている。前上カメラ80UFは、光軸を表す仮想線である破線M4が旋回軸Kに垂直な仮想平面に対して角度(仰角)φ4を形成するように構成されている。図示はされていないが、左カメラ80L及び右カメラ80Rも同様に、各光軸が旋回軸Kに垂直な仮想平面に対して俯角を形成するように構成され、左上カメラ80UL及び右上カメラ80URも同様に、各光軸が旋回軸Kに垂直な仮想平面に対して仰角を形成するように構成されている。
図17Cでは、領域R1は、前カメラ80Fの監視範囲(撮像範囲)と前上カメラ80UFの撮像範囲とが重複している部分を表し、領域R2は、後カメラ80Bの撮像範囲と後上カメラ80UBの撮像範囲とが重複している部分を表している。すなわち、後カメラ80Bと後上カメラ80UBは、互いの撮像範囲が上下方向で部分的に重複するように配置され、前カメラ80Fと前上カメラ80UFも、互いの撮像範囲が上下方向で部分的に重複するように配置されている。また、図示は省略されているが、左カメラ80Lと左上カメラ80ULも互いの撮像範囲が上下方向で部分的に重複するように配置され、右カメラ80Rと右上カメラ80URも互いの撮像範囲が上下方向で部分的に重複するように配置されている。
図17Cに示すように、後カメラ80Bは、撮像範囲の下側の境界を表す仮想線である破線L1が、旋回軸Kに垂直な仮想平面(図17Cの例では仮想水平面)に対して角度(俯角)θ1を形成するように構成されている。後上カメラ80UBは、撮像範囲の上側の境界を表す仮想線である破線L2が、旋回軸Kに垂直な仮想平面に対して角度(仰角)θ2を形成するように構成されている。前カメラ80Fは、撮像範囲の下側の境界を表す仮想線である破線L3が、旋回軸Kに垂直な仮想平面に対して角度(俯角)θ3を形成するように構成されている。前上カメラ80UFは、撮像範囲の上側の境界を表す仮想線である破線L4が、旋回軸Kに垂直な仮想平面に対して角度(仰角)θ4を形成するように構成されている。角度(俯角)θ1及び角度(俯角)θ3は、望ましくは、55度以上である。図17Cでは、角度(俯角)θ1は、約70度であり、角度(俯角)θ3は、約65度である。角度(仰角)θ2及び角度(仰角)θ4は、望ましくは、90度以上であり、より望ましくは、135度以上であり、更に望ましくは、180度である。図17Cでは、角度(仰角)θ2は、約115度であり、角度(仰角)θ4は、約115度である。図示はされていないが、左カメラ80L及び右カメラ80Rも同様に、各撮像範囲の下側の境界が旋回軸Kに垂直な仮想平面に対し、55度以上の俯角を形成するように構成され、左上カメラ80UL及び右上カメラ80URも同様に、各撮像範囲の上側の境界が旋回軸Kに垂直な仮想平面に対し、90度以上の仰角を形成するように構成されている。
そのため、ショベル100は、前上カメラ80UFによりキャビン10の上方の空間内に存在する物体を検知できる。また、ショベル100は、後上カメラ80UBによりエンジンフードの上方の空間内に存在する物体を検知できる。また、ショベル100は、左上カメラ80UL及び右上カメラURにより上部旋回体3の上方の空間内に存在する物体を検出できる。このように、ショベル100は、後上カメラ80UB、前上カメラ80UF、左上カメラ80UL、及び右上カメラ80URによりショベル100の上方の空間内に存在する物体を検知できる。
図17Dでは、領域R3は、前カメラ80Fの撮像範囲と前上カメラ80UFの撮像範囲とが重複している部分を表し、領域R4は、左カメラ80Lの撮像範囲と後カメラ80Bの撮像範囲とが重複している部分を表し、領域R5は、後カメラ80Bの撮像範囲と右カメラ80Rの撮像範囲とが重複している部分を表し、領域R6は、右カメラ80Rの撮像範囲と前カメラ80Fの撮像範囲とが重複している部分を表している。すなわち、前カメラ80Fと左カメラ80Lは、互いの撮像範囲が左右方向で部分的に重複するように配置され、左カメラ80Lと後カメラ80Bも、互いの撮像範囲が左右方向で部分的に重複するように配置され、後カメラ80Bと右カメラ80Rも、互いの撮像範囲が左右方向で部分的に重複するように配置され、右カメラ80Rと前カメラ80Fも、互いの撮像範囲が左右方向で部分的に重複するように配置されている。また、図示は省略されているが、前上カメラ80UFと左上カメラ80ULも、互いの撮像範囲が左右方向で部分的に重複するように配置され、左上カメラ80ULと後上カメラ80UBも、互いの撮像範囲が左右方向で部分的に重複するように配置され、後上カメラ80UBと右上カメラ80URも、互いの撮像範囲が左右方向で部分的に重複するように配置され、右上カメラ80URと前上カメラ80UFも、互いの撮像範囲が左右方向で部分的に重複するように配置されている。
このような配置により、前上カメラ80UFは、例えば、ブーム4を最も上昇させたときにブーム4の先端が位置する空間及びその周囲の空間にある物体を撮像できる。そのため、コントローラ30は、例えば、前上カメラ80UFが撮像した画像を利用することで、ショベル100の上空に架けられている電線にブーム4の先端が接触してしまうのを防止できる。
前上カメラ80UFは、ブーム4を最も上昇させた姿勢であるブーム上限姿勢においてアーム5及びバケット6の少なくとも一方が回動させられたとしても、アーム5及びバケット6が前上カメラ80UFの撮像範囲内に入るように、キャビン10に取り付けられていてもよい。この場合、ブーム上限姿勢においてアーム5及びバケット6の少なくとも一方が最大限開かれたとしても、コントローラ30は、周囲の物体と掘削アタッチメントATとが接触するおそれがあるか否かを判定できる。掘削アタッチメントATは、アタッチメントの一例であり、ブーム4、アーム5、及びバケット6で構成されている。
物体検知装置70も撮像装置80と同様に配置されていてもよい。すなわち、後センサ70Bと後上センサ70UBは、互いの監視範囲(検知範囲)が上下方向で部分的に重複するように配置され、前センサ70Fと前上センサ70UFも、互いの検知範囲が上下方向で部分的に重複するように配置され、左センサ70Lと左上センサ70ULも互いの検知範囲が上下方向で部分的に重複するように配置され、右センサ70Rと右上センサ70URも互いの検知範囲が上下方向で部分的に重複するように配置されていてもよい。
前センサ70Fと左センサ70Lは、互いの検知範囲が左右方向で部分的に重複するように配置され、左センサ70Lと後センサ70Bも、互いの検知範囲が左右方向で部分的に重複するように配置され、後センサ70Bと右センサ70Rも、互いの検知範囲が左右方向で部分的に重複するように配置され、右センサ70Rと前センサ70Fも、互いの検知範囲が左右方向で部分的に重複するように配置されていてもよい。
前上センサ70UFと左上センサ70ULは、互いの検知範囲が左右方向で部分的に重複するように配置され、左上センサ70ULと後上センサ70UBも、互いの検知範囲が左右方向で部分的に重複するように配置され、後上センサ70UBと右上センサ70URも、互いの検知範囲が左右方向で部分的に重複するように配置され、右上センサ70URと前上センサ70UFも、互いの検知範囲が左右方向で部分的に重複するように配置されていてもよい。
後センサ70B、前センサ70F、左センサ70L、及び右センサ70Rは、各光軸が旋回軸Kに垂直な仮想平面に対して俯角を形成するように構成され、後上センサ70UB、前上センサ70UF、左上センサ70UL、及び右上センサ70URは、各光軸が旋回軸Kに垂直な仮想平面に対して仰角を形成するように構成されていてもよい。
後センサ70B、前センサ70F、左センサ70L、及び右センサ70Rは、各検知範囲の下側の境界が旋回軸Kに垂直な仮想平面に対して俯角を形成するように構成され、後上センサ70UB、前上センサ70UF、左上センサ70UL、及び右上センサ70URは、各検知範囲の上側の境界が旋回軸Kに垂直な仮想平面に対して仰角を形成するように構成されていてもよい。
図17A~図17Dの例では、後カメラ80Bは後センサ70Bに隣接して配置され、前カメラ80Fは前センサ70Fに隣接して配置され、左カメラ80Lは左センサ70Lに隣接して配置され、且つ、右カメラ80Rは右センサ70Rに隣接して配置されている。また、後上カメラ80UBは後上センサ70UBに隣接して配置され、前上カメラ80UFは前上センサ70UFに隣接して配置され、左上カメラ80ULは左上センサ70ULに隣接して配置され、且つ、右上カメラ80URは右上センサ70URに隣接して配置されている。
図17A~図17Dの例では、物体検知装置70及び撮像装置80は何れも、図17Dに示すように、上面視で上部旋回体3の輪郭からはみ出さないように、上部旋回体3に取り付けられている。但し、物体検知装置70及び撮像装置80の少なくとも1つは、上面視で上部旋回体3の輪郭からはみ出すように、上部旋回体3に取り付けられていてもよい。
後上カメラ80UBは、省略されてもよく、後カメラ80Bに統合されていてもよい。後上カメラ80UBが統合された後カメラ80Bは、後上カメラ80UBがカバーしていた撮像範囲を含む広い撮像範囲をカバーできるように構成されていてもよい。前上カメラ80UF、左上カメラ80UL、及び右上カメラ80URについても同様である。また、後上センサ70UBは、省略されてもよく、後センサ70Bに統合されていてもよい。前上センサ70UF、左上センサ70UL、及び右上センサ70URについても同様である。また、後上カメラ80UB、前上カメラ80UF、左上カメラ80UL、及び右上カメラ80URの少なくとも2つは、1又は複数の全天球カメラ又は半球カメラとして統合されていてもよい。
コントローラ30は、物体検知装置70の出力に基づき、ショベル100と物体との間の距離を算出する際に、ショベル100及び物体のそれぞれの全体的且つ立体的な外形(外表面)を認識するように構成されていてもよい。ショベル100の外表面は、例えば、下部走行体1の外表面、上部旋回体3の外表面、及び、掘削アタッチメントATの外表面を含む。コントローラ30には、姿勢センサの取り付け位置と下部走行体1の外表面、上部旋回体3の外表面、及び、掘削アタッチメントATの外表面との位置関係が予め設定されている。そのため、コントローラ30は、姿勢センサの位置の変化を所定の周期で算出することにより、下部走行体1の外表面、上部旋回体3の外表面、及び、掘削アタッチメントATの外表面の位置の変化も算出できる。
具体的には、コントローラ30は、例えば、ポリゴンモデル又はワイヤーフレームモデル等の仮想的な三次元モデルを用いてショベル100の全体的且つ立体的な外形(外表面)を認識して外表面上の点の座標を算出する。なお、下部走行体1の外表面は、例えば、クローラ1Cの前面、上面、底面、及び後面等を含む。上部旋回体3の外表面は、例えば、側面カバーの表面、エンジンフードの上面、並びに、カウンタウェイトの上面、左側面、右側面、及び後面等を含む。掘削アタッチメントATの外表面は、例えば、ブーム4の背面、左側面、右側面、及び腹面、並びに、アーム5の背面、左側面、右側面、及び腹面等を含む。
図18は、ポリゴンモデルを用いて認識されるショベル100の全体的且つ立体的な外表面の構成例を示す。図形18Aは、上部旋回体3及び掘削アタッチメントATのポリゴンモデルの上面図であり、図形18Bは、下部走行体1のポリゴンモデルの上面図であり、図形18Cは、ショベル100のポリゴンモデルの左側面図である。図18では、下部走行体1の外表面は、斜線パターンで表され、上部旋回体3の外表面は、粗いドットパターンで表され、掘削アタッチメントATの外表面は、細かいドットパターンで表されている。
ポリゴンモデルとしてのショベル100の外表面は、実際のショベル100の外表面よりも所定の余裕距離だけ外側にある表面として認識されてもよい。すなわち、ポリゴンモデルとしてのショベル100は、例えば、実際の下部走行体1、上部旋回体3、及び掘削アタッチメントATのそれぞれが別々に相似拡大されたものとして認識されてもよい。この場合、余裕距離は、ショベル100の動き(例えば、掘削アタッチメントATの動き)等に応じて変化する距離であってもよい。そして、コントローラ30は、この相似拡大されたポリゴンモデルと物体検知装置70が検知した物体のポリゴンモデルとが接触した或いは接触するおそれがあると判定した場合に、警報を出力してもよく、上述の自動制動処理等によって被駆動体の動きを制動してもよい。
コントローラ30は、例えば、ショベル100の外表面を構成する3つの部分(下部走行体1の外表面、上部旋回体3の外表面、及び、掘削アタッチメントATの外表面)のそれぞれについて、機体の一部が物体と接触するおそれがあるか否かを別々に判定してもよい。また、コントローラ30は、ショベル100の作業内容によっては、3つの部分のうちの少なくとも1つについて、機体の一部が物体と接触するおそれがあるか否かの判定を省略してもよい。
例えば、図10A1、図10A2、図10B1、及び図10B2に示す例では、コントローラ30は、所定の制御周期毎に、掘削アタッチメントATの外表面上の各点と物体OBとの間の距離を算出してもよい。この場合、コントローラ30は、下部走行体1の外表面上の各点及び上部旋回体3の外表面上の各点と物体OBとの間の距離の算出を省略してもよい。
或いは、ショベル100の上空にある電線とショベル100とが接触するおそれのある作業現場では、コントローラ30は、掘削アタッチメントATの外表面上の各点(例えばブーム先端の外表面上の各点)と電線との間の距離を所定の制御周期毎に算出するように構成されてもよい。この場合、コントローラ30は、下部走行体1の外表面上の各点及び上部旋回体3の外表面上の各点と電線との間の距離の算出を省略してもよい。
或いは、ショベル100の後方又は側方にある物体とショベル100とが接触するおそれのある作業現場では、コントローラ30は、上部旋回体3の外表面上の各点(例えばカウンタウェイトの外表面上の各点)とその物体との間の距離を所定の制御周期毎に算出するように構成されてもよい。この場合、コントローラ30は、下部走行体1の外表面上の各点及び掘削アタッチメントATの外表面上の各点とその物体との間の距離の算出を省略してもよい。
或いは、クローラ1Cの近くにあるクローラ1Cよりも低い物体とショベル100とが接触するおそれのある作業現場では、コントローラ30は、下部走行体1の外表面上の各点(例えばクローラ1Cの外表面上の各点)とその物体との間の距離を所定の制御周期毎に算出するように構成されてもよい。この場合、コントローラ30は、上部旋回体3の外表面上の各点及び掘削アタッチメントATの外表面上の各点とその物体との間の距離の算出を省略してもよい。
ここで、図19を参照し、ショベル100の外表面を構成する3つの部分のそれぞれと、周囲監視装置としての物体検知装置70によって検知された物体との間の距離に基づいて被駆動体の動きを制限する機能の一例について説明する。図19は、コントローラ30の構成の一例を示す図である。なお、周囲監視装置は、撮像装置80であってもよい。
図19に示す例では、コントローラ30は、物体判定部30A、制動要否判定部30B、速度指令生成部30E、状態認識部30F、距離判定部30G、制限対象決定部30H、及び速度制限部30Sを機能要素として有する。そして、コントローラ30は、ブーム角度センサS1、アーム角度センサS2、バケット角度センサS3、機体傾斜センサS4、旋回角速度センサS5、電気式の左操作レバー26L、物体検知装置70、及び撮像装置80等が出力する信号を受け、様々な演算を実行し、比例弁31等に制御指令を出力できるように構成されている。
比例弁31は、コントローラ30が出力する電流指令に応じて動作するように構成されている。比例弁31は、左比例弁31L及び右比例弁31Rを含む。具体的には、左比例弁31Lは、パイロットポンプ15から左比例弁31Lを介して制御弁173の左パイロットポートに導入される作動油によるパイロット圧を調整できるように構成されている。同様に、右比例弁31Rは、パイロットポンプ15から右比例弁31Rを介して制御弁173の右側パイロットポートに導入される作動油によるパイロット圧を調整できるように構成されている。比例弁31は、制御弁173を任意の弁位置で停止できるようにパイロット圧を調整可能である。なお、図19は、旋回用油圧モータ2Aに供給される作動油の流量を制御する制御弁173に関する構成を一例として示しているが、コントローラ30は、同様の構成により、走行用油圧モータ2M、ブームシリンダ7、アームシリンダ8、及びバケットシリンダ9のそれぞれに供給される作動油の流量を制御できる。
物体判定部30Aは、物体の種類を判定するように構成されている。図19に示す例では、物体判定部30Aは、物体検知装置70が検知した物体の種類を判定するように構成されている。
制動要否判定部30Bは、物体の種類に応じて制動の要否を判定するように構成されている。図19に示す例では、制動要否判定部30Bは、物体検知装置70が検知した物体が人であると判定された場合、被駆動体の制動が必要であると判定する。
速度指令生成部30Eは、操作装置26が出力する信号に基づいてアクチュエータの動作速度に関する指令を生成するように構成されている。図19に示す例では、速度指令生成部30Eは、左右方向に操作された左操作レバー26Lが出力する電気信号に基づいて旋回用油圧モータ2Aの回転速度に関する指令を生成するように構成されている。
状態認識部30Fは、ショベル100の現在の状態を認識するように構成されている。具体的には、状態認識部30Fは、アタッチメント状態認識部30F1、上部旋回体状態認識部30F2、及び下部走行体状態認識部30F3を有する。
アタッチメント状態認識部30F1は、掘削アタッチメントATの現在の状態を認識するように構成されている。具体的には、アタッチメント状態認識部30F1は、掘削アタッチメントATの外表面上の所定点の座標を算出するように構成されている。所定点は、例えば、掘削アタッチメントATの全頂点を含む。
上部旋回体状態認識部30F2は、上部旋回体3の現在の状態を認識するように構成されている。具体的には、上部旋回体状態認識部30F2は、上部旋回体3の外表面上の所定点の座標を算出するように構成されている。所定点は、例えば、上部旋回体3の全頂点を含む。
下部走行体状態認識部30F3は、下部走行体1の現在の状態を認識するように構成されている。具体的には、下部走行体状態認識部30F3は、下部走行体1の外表面上の所定点の座標を算出するように構成されている。所定点は、例えば、下部走行体1の全頂点を含む。
状態認識部30Fは、ショベル100の作業内容等に応じ、ショベル100の外表面を構成する3つの部分(下部走行体1の外表面、上部旋回体3の外表面、及び、掘削アタッチメントATの外表面)のうちの何れの状態の認識を実行し、何れの状態の認識を省略するかを決定してもよい。
距離判定部30Gは、状態認識部30Fが算出したショベル100の外表面上の各点と物体検知装置70によって検知された物体との間の距離が所定値を下回ったか否かを判定するように構成されている。図19に示す例では、距離判定部30Gは、制動要否判定部30Bによって被駆動体の制動が必要と判断された場合に、状態認識部30Fが算出したショベル100の外表面上の各点と物体検知装置70によって検知された物体との間の距離を算出する。
制限対象決定部30Hは、制限対象を決定するように構成されている。図19に示す例では、制限対象決定部30Hは、距離判定部30Gの出力、すなわち、ショベル100の外表面上の何れの点と物体との間の距離が所定値を下回ったかに基づき、動きを制限すべきアクチュエータ(以下、「制限対象アクチュエータ」とする。)を決定する。
速度制限部30Sは、1又は複数のアクチュエータの動作速度を制限するように構成されている。図19に示す例では、速度制限部30Sは、速度指令生成部30Eが生成した速度指令のうちの、制限対象決定部30Hにより制限対象アクチュエータとして決定されたアクチュエータに関する速度指令を変更し、変更後の速度指令に対応する制御指令を比例弁31に対して出力する。
具体的には、速度制限部30Sは、制限対象決定部30Hにより制限対象アクチュエータとして決定された旋回用油圧モータ2Aに関する速度指令を変更し、変更後の速度指令に対応する制御指令を比例弁31に対して出力する。旋回用油圧モータ2Aの回転速度を低減させ或いは旋回用油圧モータ2Aの回転を停止させるためである。
より具体的には、速度制限部30Sは、図6、図8、図11、及び図13のそれぞれで示したような制動パターンを用いて1又は複数のアクチュエータの動作速度を制限するように構成されている。
速度制限部30Sは、例えば、バケット6内に取り込まれた土砂等の被掘削物の重量と掘削アタッチメントATの姿勢とに応じて制動パターンを変化させてもよい。この場合、被掘削物の重量は、例えば、掘削アタッチメントATの姿勢と、ブームシリンダ7における作動油の圧力とに基づいて算出される。なお、被掘削物の重量は、掘削アタッチメントATの姿勢と、ブームシリンダ7における作動油の圧力、アームシリンダ8における作動油の圧力、及び、バケットシリンダ9における作動油の圧力の少なくとも1つとに基づいて算出されてもよい。
速度制限部30Sにより、図19に示すコントローラ30は、ショベル100の機体の一部が物体と接触するのを防止するために、アクチュエータの動きを減速させ或いは停止させることができる。
次に、図20を参照し、ショベル100の外表面を構成する3つの部分のそれぞれと、周囲監視装置としての物体検知装置70によって検知された物体との間の距離に基づいて被駆動体の動きを制限する機能の別の一例について説明する。図20は、コントローラ30の構成の別の一例を示す図である。なお、周囲監視装置は、撮像装置80であってもよい。
図20に示すコントローラ30は、油圧式パイロット回路を備えた油圧式操作レバーに接続される構成である点で、油圧式パイロット回路を備えた電気式操作レバーに接続される構成である図19に示すコントローラ30と異なる。具体的には、図20に示すコントローラ30の速度制限部30Sは、操作圧センサ29の出力に基づいて速度指令を生成し、生成した速度指令のうちの、制限対象決定部30Hにより制限対象アクチュエータとして決定されたアクチュエータに関する速度指令を変更し、変更後の速度指令に対応する制御指令をそのアクチュエータに関する電磁弁65に対して出力する。
電磁弁65は、電磁弁65L及び電磁弁65Rを含む。図20に示す例では、電磁弁65Lは、左操作レバー26Lが左右方向に操作されたときに作動油を吐出するリモコン弁の左側ポートと制御弁173の左側パイロットポートとを繋ぐ管路に配置される電磁比例弁である。電磁弁65Rは、左操作レバー26Lが左右方向に操作されたときに作動油を吐出するリモコン弁の右側ポートと制御弁173の右側パイロットポートとを繋ぐ管路に配置される電磁比例弁である。
具体的には、速度制限部30Sは、制限対象決定部30Hにより制限対象アクチュエータとして決定された旋回用油圧モータ2Aに関する速度指令を変更し、変更後の速度指令に対応する制御指令を電磁弁65に対して出力する。旋回用油圧モータ2Aの回転速度を低減させ或いは旋回用油圧モータ2Aの回転を停止させるためである。
速度制限部30Sにより、図20に示すコントローラ30は、図19に示すコントローラ30と同様に、ショベル100の機体の一部が物体と接触するのを防止するために、アクチュエータの動きを減速させ或いは停止させることができる。
以上、本発明の好ましい実施形態について詳説した。しかしながら、本発明は、上述した実施形態に制限されることはない。上述した実施形態は、本発明の範囲を逸脱することなしに、種々の変形又は置換等が適用され得る。また、別々に説明された特徴は、技術的な矛盾が生じない限り、組み合わせが可能である。
例えば、上述の実施形態では、油圧式パイロット回路を備えた油圧式操作システムが開示されている。例えば、左操作レバー26Lに関する油圧式パイロット回路では、図20に示すように、パイロットポンプ15から左操作レバー26Lへ供給される作動油が、左操作レバー26Lの左右方向への傾倒によって開閉されるリモコン弁の開度に応じた流量で、制御弁173のパイロットポートへ伝達される。或いは、右操作レバー26Rに関する油圧式パイロット回路では、パイロットポンプ15から右操作レバー26Rへ供給される作動油が、右操作レバー26Rの前後方向への傾倒によって開閉されるリモコン弁の開度に応じた流量で、制御弁175のパイロットポートへ伝達される。
但し、このような油圧式パイロット回路を備えた油圧式操作システムではなく、図19に示すような電気式操作レバーが採用されてもよい。この場合、電気式操作レバーのレバー操作量は、例えば、電気信号としてコントローラ30へ入力される。この構成により、電気式操作レバーを用いた手動操作が行われると、コントローラ30は、レバー操作量に対応する電気信号によって電磁弁を制御してパイロット圧を増減させることで各制御弁を移動させることができる。
図15に示される油圧システムは、パイロットポンプ15と操作装置26のそれぞれに対応する各リモコン弁との間に、制御弁60A~60Fを配置させることで、制動の対象となるアクチュエータに関するスプール弁を所定の制動パターンにしたがって動かし、アクチュエータを滑らかに減速させ、或いは、停止させることができるように構成されている。しかしながら、油圧システムは、操作装置26のそれぞれに対応する各リモコン弁と制御弁171~176との間において、制御弁60A~60Fが配置される構成であってもよい。例えば、左操作レバー26Lのリモコン弁と制御弁176との間に、制御弁60Aが設けられていてもよい。この構成においても、コントローラ30は、制動の対象となるアクチュエータに関するスプール弁を所定の制動パターンにしたがって動かすことで、アクチュエータを滑らかに減速させ、或いは、停止させることができる。
また、ショベル100が取得する情報は、図21に示すようなショベルの管理システムSYSを通じ、管理者及び他のショベルの操作者等と共有されてもよい。図21は、ショベルの管理システムSYSの構成例を示す概略図である。管理システムSYSは、ショベル100を管理するシステムである。本実施形態では、管理システムSYSは、主に、ショベル100、支援装置200、及び管理装置300で構成される。ショベル100、支援装置200、及び管理装置300のそれぞれは、通信装置を備え、携帯電話通信網、衛星通信網、又は近距離無線通信網等を介して互いに直接的に或いは間接的に接続されている。管理システムSYSを構成するショベル100、支援装置200、及び管理装置300は、それぞれ1台であってもよく、複数台であってもよい。図12の例では、管理システムSYSは、1台のショベル100と、1台の支援装置200と、1台の管理装置300とを含む。
支援装置200は、典型的には携帯端末装置であり、例えば、施工現場にいる作業者等が携帯するノートPC、タブレットPC又はスマートフォン等のコンピュータである。支援装置200は、ショベル100の操作者が携帯するコンピュータであってもよい。但し、支援装置200は、固定端末装置であってもよい。
管理装置300は、典型的には固定端末装置であり、例えば、施工現場外の管理センタ等に設置されるサーバコンピュータである。管理装置300は、可搬性のコンピュータ(例えば、ノートPC、タブレットPC又はスマートフォン等の携帯端末装置)であってもよい。
支援装置200及び管理装置300の少なくとも一方(以下、「支援装置200等」とする。)は、モニタと遠隔操作用の操作装置とを備えていてもよい。この場合、操作者は、遠隔操作用の操作装置を用いつつ、ショベル100を操作する。遠隔操作用の操作装置は、例えば、携帯電話通信網、衛星通信網、又は近距離無線通信網等の通信網を通じ、コントローラ30に接続される。
上述のようなショベルの管理システムSYSでは、ショベル100のコントローラ30は、例えば、自動制動処理に関する情報を支援装置200等に送信してもよい。自動制動処理に関する情報は、例えば、被駆動体の制動を開始した時刻(以下、「制動開始時刻」とする。)に関する情報、制動開始時刻におけるショベル100の位置に関する情報、制動開始時刻におけるショベル100の作業内容に関する情報、制動開始時刻における作業環境に関する情報、及び、制動開始時刻及びその前後の期間に測定されたショベル100の動きに関する情報等の少なくとも1つを含む。作業環境に関する情報は、例えば、地面の傾斜に関する情報、及び、天気に関する情報等の少なくとも1つを含む。ショベル100の動きに関する情報は、例えば、パイロット圧、及び、油圧アクチュエータにおける作動油の圧力等の少なくとも1つを含む。
コントローラ30は、撮像装置80が撮像した画像を支援装置200等に送信してもよい。画像は、例えば、制動開始時刻を含む所定期間に撮像された複数の画像であってもよい。所定期間は、制動開始時刻に先行する期間を含んでいてもよい。
更に、コントローラ30は、制動開始時刻を含む所定期間におけるショベル100の作業内容に関する情報、ショベル100の姿勢に関する情報、及び掘削アタッチメントの姿勢に関する情報等の少なくとも1つを支援装置200等に送信してもよい。支援装置200等を利用する管理者が、作業現場に関する情報を入手できるようにするためである。すなわち、ショベル100の動きを減速或いは停止させなければならない状況が発生した原因等を管理者が分析できるようにするためであり、更には、そのような分析結果に基づいて管理者がショベル100の作業環境を改善できるようにするためである。
本願は、2018年3月28日に出願した日本国特許出願2018-062806号に基づく優先権を主張するものであり、この日本国特許出願の全内容を本願に参照により援用する。