JP4518833B2 - 回転角センサ - Google Patents
回転角センサ Download PDFInfo
- Publication number
- JP4518833B2 JP4518833B2 JP2004134430A JP2004134430A JP4518833B2 JP 4518833 B2 JP4518833 B2 JP 4518833B2 JP 2004134430 A JP2004134430 A JP 2004134430A JP 2004134430 A JP2004134430 A JP 2004134430A JP 4518833 B2 JP4518833 B2 JP 4518833B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- calculated
- value
- detection
- steering shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/02—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using mechanical means
- G01D5/04—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using mechanical means using levers; using cams; using gearing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
- B62D15/0215—Determination of steering angle by measuring on the steering column
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Steering Controls (AREA)
Description
以下、本発明の第1の実施の形態を図面に基づいて説明する。まず、図1〜図7に基づいて、本第1の実施の形態に係る回転角センサ1の構成及び各構成要素の主な機能を説明する。なお、以下の説明では、ステアリングシャフトの絶対角度は、ステアリングシャフトが中立状態となる場合にゼロとなる。
ここで、磁気センサ32の周期c3は、検出用ギア3が一回転する間にステアリングシャフトが回転する角度を意味し、磁気センサ22の周期c2は、検出用ギア2が一回転する間にステアリングシャフトが回転する角度を意味する。具体的には、周期c2、c3は、以下の式(1)、(2)で表される。ここで、mはメインギア1aの歯数であり、n2は検出用ギア2の歯数であり、n3は検出用ギア3の歯数である。
c3=360*n3/m …(2)
最小公倍数LCMの範囲内では、デジタル信号の値S2、S3の組は一意に定まるので、この条件を満たす場合、図2(a)、(b)に示すように、デジタル信号の値S2、S3の組は操舵角測定範囲内で一意に定まる。
演算処理部5は、回転角センサ1への電源投入時点に、選択信号及びクロック信号を生成して磁気センサ22、32に出力する。そして、当該出力に応じて磁気センサ22、32から与えられたデジタル信号を読み込んで、図2に示すように、磁気センサ22、32の当該時点での周期値j2(0)、j3(0)を算出する。
MARKrevo3={(S3*i2/i3−S2+a3)/2^rez3}の余り …(4)
i2=m/n2 …(5)
i3=m/n3 …(6)
a2=△t2/2=2^rez/x2/2 …(7)
a3=△t3/2=2^rez/x3/2 …(8)
x2=LCM/c2 …(9)
x3=LCM/c3 …(10)
そして、演算処理部5は、周期値判定値MARKrevo2、MARKrevo3に基づいて、周期値j2(0)、j3(0)を算出する。
θ3(0)=S3(0)*360*n3/2^rez3/m+j3(0)*360*n3/m−θoffset …(12)
θoffset=LCM/2 …(13)
ここで、周期値j2(0)、j3(0)は、上述したように、磁気センサ22及び磁気センサ32から出力されるデジタル信号の値S2、S3に基づいて算出されるものである。したがって、周期値絶対角度は、磁気センサ22及び磁気センサ32から出力されるデジタル信号の値S2、S3に基づいて算出されるステアリングシャフトの絶対角度を意味する。
演算処理部5は、周期値絶対角度算出処理を何回か行った後、所定のn回目のサンプリング時点で、選択信号及びクロック信号を生成して磁気センサ22、32に出力する。そして、当該出力に応じて磁気センサ22、32から与えられたデジタル信号を読み込み、当該読み込んだデジタル信号と、前回読み込んだデジタル信号と、前回算出された周期値j2(n−1)、j3(n−1)に基づいて、磁気センサ22、32のn回目のサンプリング時点での(即ち、今回の)周期値j2(n)、j3(n)を算出する。さらに、今回読み込んだデジタル信号と、当該算出された周期値j2(n)、j3(n)に基づいて、ステアリングシャフトの今回のカウント絶対角度θ2(n)、θ3(n)を算出する。
△S2(n) > Sx2 …(15)
△S2(n) <−Sx2 …(16)
同様に、演算処理部5は、差△S3(n)が式(17)を満たす場合、今回の周期値j3(n)を前回の周期値j3(n−1)と同じ値として算出し、差△S3(n)が式(18)を満たす場合、今回の周期値j3(n)を前回の周期値j3(n−1)より1小さい値として算出する。また、演算処理部5は、差△S3(n)が式(19)を満たす場合、今回の周期値j3(n)を前回の周期値j3(n−1)よりも1大きな値として算出する。
△S3(n) > Sx3 …(18)
△S3(n) <−Sx3 …(19)
ここで、Sx2、Sx3は、以下の式(20)、(21)を満たす定数である。
Sx3 < 2^rez3/2 …(21)
ここで、サンプリング間隔の設定方法について、図7に基づいて説明する。図7は、時刻と磁気センサ32から出力されるデジタル信号の値S3(T)との関係を示すグラフL3を、時刻を横軸、磁気センサ32から出力されるデジタル信号の値S3(T)を縦軸とした平面上に描いたものである。図7中、時間Txは、検出用ギア3が所定の回転範囲(磁気センサ32が検出可能な回転範囲で、本第1の実施の形態及び後述する第2〜第3の実施の形態では360(deg)となる)を回転するのに要する最短時間である。
同様の考え方により、演算処理部5が磁気センサ22から出力されたデジタル信号のみを読み込む場合、サンプリング間隔Tsam2は、以下の式(23)を満たす必要がある。
本願では、演算処理部5は、磁気センサ22、32の双方から出力されたデジタル信号を読み込んで周期値j2(n)、j3(n)を算出するので、サンプリング間隔Tsamは、以下の式(24)を満たすように設定される。
演算処理部5は、上述した処理により算出された周期値j2(n)、j3(n)及び今回読み込んだデジタル信号の値S2(n)、S3(n)に基づいて、以下の式(25)、(26)によりカウント絶対角度θ2(n)、θ3(n)を算出する。そして、当該算出されたカウント絶対角度θ2(n)、θ3(n)に関するカウント絶対角度信号を生成して車両側の上位システムに出力する。
θ3(n)=S3(n)*360*n3/2^rez3/m+j3(n)*360*n3/m−θoffset …(26)
ここで、式(14)〜(26)に示すように、カウント絶対角度θ2(n)は、前回算出された周期値j2(n−1)と、前回及び今回のデジタル信号の値S2(n−1)、S2(n)とに基づいて算出されるステアリングシャフトの絶対角度を意味する。同様に、カウント絶対角度θ3(n)は、前回算出された周期値j3(n−1)と、前回及び今回のデジタル信号の値S3(n−1)、S3(n)とに基づいて算出されるステアリングシャフトの絶対角度を意味する。
演算処理部5は、磁気センサ22、32に選択信号及びクロック信号を出力した際に、磁気センサ22、32のうち、少なくとも一方から磁界強度異常信号を与えられた場合には、算出された周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)を異常値と判定する。
演算処理部5は、カウント絶対角度θ2(n)とカウント絶対角度θ3(n)との角度差△θを算出する。
△Θ=c3/x2/2 …(28)
|△θ|>△Θ …(29)
ここで、演算処理部5が上述した判定を行うことが出来るのは、以下の理由による。即ち、カウント絶対角度θ2(n)、θ3(n)が正確に算出されている場合、カウント絶対角度θ2(n)とカウント絶対角度θ3(n)とは一致するから、デジタル信号の値S2(n)、S3(n)から算出される周期値j2、j3の組と、カウント絶対角度θ2(n)、θ3(n)を算出する際に使用される周期値j2、j3の組とは一致する。
例えば、回転角センサ1への電源投入時に算出された周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)が正常値であっても、この時点で式(29)が満たされる場合、演算処理部5は、当該周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)を異常値と判定することが出来る。したがって、演算処理部5は、回転角センサ1への電源投入時に算出された周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)が異常値であるかどうかを、ステアリングが操作される前に判定することが出来る。
演算処理部5は、算出された周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)が以下の式(30)〜(33)のいずれかを満たす場合、当該算出された周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)を異常値と判定する。
|θ3(0)|>α …(31)
|θ2(n)|>α …(32)
|θ3(n)|>α …(33)
なお、演算処理部5が上述した判定を行うことが出来るのは以下の理由による。即ち、上述したように、演算処理部5は、操舵角測定範囲内におけるステアリングシャフトの実際の絶対角度を、周期値絶対角度θ2(0)、θ3(0)またはカウント絶対角度θ2(n)、θ3(n)として一意に算出するものである。したがって、通常であれば、周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)は操舵角測定範囲を超えることはない。したがって、演算処理部5は、上述した判定を行うことが出来る。
演算処理部5は、周期値絶対角度θ2(0)、θ3(0)、カウント絶対角度θ2(n)、θ3(n)のそれぞれについて、以下の式(34)〜(37)により、角速度ω21、ω22、ω31、ω32を算出する。ここで、θ2’(0)は式(11)を用いて前回算出された周期値絶対角度であり、θ’3(0)は式(12)を用いて前回算出された周期値絶対角度である。
ω31=|θ3(0)−θ3’(0)|/Tsam …(35)
ω22=|θ2(n)−θ2(n−1)|/Tsam …(36)
ω32=|θ3(n)−θ3(n−1)|/Tsam …(37)
そして、演算処理部5は、角速度ω21、ω22、ω31、ω32が以下の式(40)〜(43)のいずれかを満たす場合、周期値絶対角度θ2(0)、θ3(0)、カウント絶対角度θ2(n)、θ3(n)を異常値と判定する。ここで、式(40)〜(43)中、基準角速度Ω2、Ω3は、以下の式(38)、(39)で表される。
Ω3=LCM/x3/Tsam …(39)
ω21>Ω2 …(40)
ω22>Ω2 …(41)
ω31>Ω3 …(42)
ω32>Ω3 …(43)
なお、演算処理部5は、ステアリングシャフトの最大角速度ω(図7参照)を基準角速度として設定し、角速度ω21、ω22、ω31、ω32のいずれかが最大角速度ωを超えた場合に、周期値絶対角度θ2(0)、θ3(0)、カウント絶対角度θ2(n)、θ3(n)を異常値と判定してもよい。なお、最大角速度ωは、基準角速度Ω2、Ω3のうち、小さい方の値よりも小さいことが望ましい。
c3=360*34/135=90.666…(deg) …(45)
LCM=360*24*17*2/135=2176(deg) …(46)
x2=2176/128=17 …(47)
x3=2176/90.666…=24 …(48)
式(46)が示すように、本第1〜第3の具体例では、式(0)を満たす。したがって、演算処理部5は、周期値絶対角度θ2(0)、θ3(0)及びカウント絶対角度θ2(n)、θ3(n)を操舵角測定範囲内で一意に算出することが出来る。
磁気センサ22、32に対して磁石21、31の回転軸がずれたり、磁気センサ22、32が回転角センサ1の外部に存在する磁界の影響を受けると、デジタル信号の値S2、S3の誤差は、図10及び図11に示すようになる。以下、図10、図11に示す誤差を「デジタル信号の出力誤差」と称する。
E3=c3*(±7)=90.666…*(±7)=±634.66 …(50)
また、演算処理部5は、上述したように、周期値絶対角度算出処理において算出された周期値j2(0)、j3(0)を増加減していくことで、周期値j2(n)、j3(n)を算出する。したがって、周期値絶対角度算出処理で周期値飛びが発生すると、カウント絶対角度θ2(n)にも、角度誤差E2が発生し、カウント絶対角度θ3(n)にも、角度誤差E3が発生する。
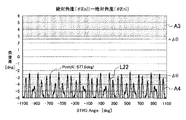
次に、第2の具体例について説明する。回転角センサ1への電源投入時でのステアリングシャフトの実際の絶対角度が−677.8(deg)である場合(図18及び図19に示すポイントA)、図18及び図19に示すように、演算処理部5が周期値絶対角度算出処理において周期値j2(0)、j3(0)を算出すると、周期値j2(0)、j3(0)に周期値飛びが発生する。
一方、この状態では、周期値飛びが発生しているのであるから、式(51)によれば、角度差△θは式(29)を満たすはずである。しかし、この状態では、角度差△θは式(29)を満たさない。これは、以下の理由による。即ち、式(25)〜(26)に示すように、カウント絶対角度θ2(n)、θ3(n)は、上述した角度誤差E2、E3の他、デジタル信号の出力誤差に基づく誤差が発生する。言い換えれば、カウント絶対角度θ2(n)、θ3(n)は、デジタル信号の出力誤差の影響も受ける。一方、この状態では、デジタル信号の出力誤差が大きい。したがって、角度差△θは、デジタル信号の出力誤差の影響が強くなるので、式(29)を満たさなくなる。
次に、第3の具体例を説明する。回転角センサ1への電源投入時でのステアリングシャフトの実際の絶対角度が−750(deg)である場合(図22及び図23に示すポイントB)、図22及び図23に示すように、演算処理部5は周期値j2(0)、j3(0)を正確に算出することができる。この状態ではデジタル信号の出力誤差が小さいので、周期値飛びが発生しないからである。
次に、本発明の第2の実施の形態を図面に基づいて説明する。第2の実施の形態に係る回転角センサ1−2は、回転角センサ1とほぼ同様であるが、カウント絶対角度θ2(n)、θ3(n)等の異常判定処理において異なる。まず、図26〜図28に示すフローチャートに沿って、回転角センサ1−2による処理の手順を説明する。
Tsam’>Tsam …(53)
ステップST2042にて、回転角センサ1−2は、ステップST2041にて算出されたカウント絶対角度θ2(n)、θ3(n)について、図8に示すステップST5と同様の処理を行う。
|△θ3|≦△Θa …(55)
この結果、演算処理部5は、式(54)〜(55)が共に満たされていると判断した場合(ステップST206:YES)には、ステップST208に進み、満たされていないと判断した場合(ステップST206:NO)には、ステップST207に進む。
次に本発明の第3の実施の形態を図面に基づいて説明する。第3の実施の形態に係る回転角センサ1−3は、回転角センサ1とほぼ同様であるが、キーシリンダにイグニッションキーが挿入されたかどうかを検出するシリンダセンサを備える点、及び周期値絶対角度θ2(0)、θ3(0)等の異常判定処理において異なる。また、回転角センサ1−3は、ロック機構(ロック手段)を備える車両に搭載される。
1a…メインギア
2、3…検出用ギア
21…磁石(第1の磁石)
22…磁気センサ(第1の検出手段)
31…磁石(第2の磁石)
32…磁気センサ(第2の検出手段)
5…演算処理部(演算手段、判定手段)
10…ケース
Claims (9)
- ステアリングシャフトに連動して回転する第1の検出用ギア及び第2の検出用ギアと、
前記第1の検出用ギアの回転角度を検出する第1の検出手段と、
前記第2の検出用ギアの回転角度を検出する第2の検出手段と、
前記第1の検出手段により検出された回転角度及び前記第2の検出手段により検出された回転角度に基づいて、前記ステアリングシャフトの回転角度を算出する演算手段と、
前記演算手段により算出されたステアリングシャフトの回転角度が異常値であるかどうかを判定する判定手段と、を備え、
前記演算手段は、
前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の周期値、及び前記第2の検出手段の周期値を算出し、
前記第1の検出手段の周期値及び前記第1の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第1の回転角度を算出し、且つ、前記第2の検出手段の周期値及び前記第2の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第2の回転角度を算出する機能を備え、
更に、該演算手段は、
前回算出された前記第1の検出手段の周期値、及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、
且つ、前回算出された前記第2の検出手段の周期値、及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出する機能を備え、
更に、車両のイグニッションがオフとなる前に、前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の前回の周期値及び前記第2の検出手段の前回の周期値を算出し、前記車両のイグニッションがオフとなった時に、前回算出された前記第1の検出手段の周期値及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、且つ、前回算出された前記第2の検出手段の周期値及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出し、前記第1の検出手段の今回の周期値、及び前記第2の検出手段の今回の周期値に基づいて、前記ステアリングの回転角を求め、
更に、前記車両のイグニッションがオフからオンになった際に、前記車両のイグニッションがオフの時に算出された前記ステアリングシャフトの第1または第2の回転角度と、前記車両のイグニッションがオンの時に算出された前記ステアリングシャフトの第1または第2の回転角度との第1角度差を算出し、
前記判定手段は、
前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度が異常値であるかどうかを判定し、
且つ、前記演算手段により算出された第1角度差が所定の第1基準角度差を超えた場合には、前記演算手段により算出された前記ステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定し、
前記第1の検出手段の周期と前記第2の検出手段の周期との最小公倍数は、操舵角測定範囲以上であることを特徴とする回転角センサ。 - ステアリングシャフトに連動して回転する第1の検出用ギア及び第2の検出用ギアと、
前記第1の検出用ギアの回転角度を検出する第1の検出手段と、
前記第2の検出用ギアの回転角度を検出する第2の検出手段と、
前記第1の検出手段により検出された回転角度及び前記第2の検出手段により検出された回転角度に基づいて、前記ステアリングシャフトの回転角度を算出する演算手段と、
前記演算手段により算出されたステアリングシャフトの回転角度が異常値であるかどうかを判定する判定手段と、を備え、
前記演算手段は、
前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の周期値、及び前記第2の検出手段の周期値を算出し、
前記第1の検出手段の周期値及び前記第1の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第1の回転角度を算出し、且つ、前記第2の検出手段の周期値及び前記第2の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第2の回転角度を算出する機能を備え、
更に、該演算手段は、
前回算出された前記第1の検出手段の周期値、及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、
且つ、前回算出された前記第2の検出手段の周期値、及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出する機能を備え、
更に、車両のイグニッションがオフとなる前に、前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の前回の周期値及び前記第2の検出手段の前回の周期値を算出し、前記車両のイグニッションがオフとなった時に、前回算出された前記第1の検出手段の周期値及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、且つ、前回算出された前記第2の検出手段の周期値及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出し、前記第1の検出手段の今回の周期値、及び前記第2の検出手段の今回の周期値に基づいて、前記ステアリングの回転角を求め、
更に、前記車両のイグニッションがオフからオンになった際に、前記車両のイグニッションがオフの時に算出された前記第1または第2の検出手段の周期値に基づいて、前記ステアリングシャフトの第1または第2の回転角度を算出し、且つ、前記車両のイグニッションがオンの時に算出された前記第1または第2の検出手段の周期値に基づいて、前記ステアリングシャフトの第1または第2の回転角度を算出し、且つ、当該算出されたステアリングシャフトの第1または第2の回転角度どうしの第2角度差を算出し、
前記判定手段は、
前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度が異常値であるかどうかを判定し、
且つ、前記演算手段により算出された第2角度差が所定の第1基準角度差を超えた場合には、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定し、
前記第1の検出手段の周期と前記第2の検出手段の周期との最小公倍数は、操舵角測定範囲以上であることを特徴とする回転角センサ。 - ステアリングシャフトに連動して回転する第1の検出用ギア及び第2の検出用ギアと、
前記第1の検出用ギアの回転角度を検出する第1の検出手段と、
前記第2の検出用ギアの回転角度を検出する第2の検出手段と、
前記第1の検出手段により検出された回転角度及び前記第2の検出手段により検出された回転角度に基づいて、前記ステアリングシャフトの回転角度を算出する演算手段と、
前記演算手段により算出されたステアリングシャフトの回転角度が異常値であるかどうかを判定する判定手段と、を備え、
前記演算手段は、
前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の周期値、及び前記第2の検出手段の周期値を算出し、
前記第1の検出手段の周期値及び前記第1の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第1の回転角度を算出し、且つ、前記第2の検出手段の周期値及び前記第2の検出手段により検出された回転角度のみに基づいて、前記ステアリングシャフトの第2の回転角度を算出する機能を備え、
更に、該演算手段は、
前回算出された前記第1の検出手段の周期値、及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、
且つ、前回算出された前記第2の検出手段の周期値、及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出する機能を備え、
更に、車両のイグニッションがオフとなる前に、前記第1の検出手段及び前記第2の検出手段により検出された回転角度に基づいて、前記第1の検出手段の前回の周期値及び前記第2の検出手段の前回の周期値を算出し、前記車両のイグニッションがオフとなった時に、前回算出された前記第1の検出手段の周期値及び前記第1の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第1の検出手段の今回の周期値を算出し、且つ、前回算出された前記第2の検出手段の周期値及び前記第2の検出手段により前回及び今回検出された回転角度のみに基づいて、前記第2の検出手段の今回の周期値を算出し、前記第1の検出手段の今回の周期値、及び前記第2の検出手段の今回の周期値に基づいて、前記ステアリングの回転角を求め、
前記判定手段は、
前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度が異常値であるかどうかを判定し、
更に、前記演算手段及び前記判定手段は、所定の動作間隔で動作し、
前記車両のイグニッションがオフの時での前記演算手段及び前記判定手段の動作間隔は、前記車両のイグニッションがオンの時での前記演算手段及び前記判定手段の動作間隔よりも長く設定され、
前記第1の検出手段の周期と前記第2の検出手段の周期との最小公倍数は、操舵角測定範囲以上であることを特徴とする回転角センサ。 - 請求項1〜3のいずれか1項に記載の回転角センサにおいて、
前記演算手段は、前記算出されたステアリングシャフトの第1の回転角度と、前記算出されたステアリングシャフトの第2の回転角度との第3角度差を算出し、
前記判定手段は、前記演算手段により算出された第3角度差が所定の第2基準角度差を超えた場合には、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定することを特徴とする回転角センサ。 - 請求項4記載の回転角センサにおいて、
前記第2基準角度差は、以下の式(27−1)
△Θ<c2/x3/2 …(27−1)
△Θ:前記第2基準角度差、c2:前記第1の検出手段の周期、x3:前記第2の検出手段の周期数、を満たすことを特徴とする回転角センサ。 - 請求項1〜5のいずれか1項に記載の回転角センサにおいて、
前記演算手段は、前記算出されたステアリングシャフトの第1の回転角度のみに基づいて、ステアリングシャフトの第1の角速度を算出し、且つ、前記算出されたステアリングシャフトの第2の回転角度のみに基づいて、ステアリングシャフトの第2の角速度を算出し、
前記判定手段は、前記演算手段により算出されたステアリングシャフトの第1の角速度及び第2の角速度のうち、少なくとも一方が所定の基準角速度を超える場合、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定することを特徴とする回転角センサ。 - 請求項1〜6のいずれか1項に記載の回転角センサにおいて、
前記第1の検出用ギアに設けられた第1の磁石と、前記第2の検出用ギアに設けられた第2の磁石と、を備え、
前記第1の検出手段は、前記第1の磁石の磁界強度を検出し、当該検出された第1の磁石の磁界強度に基づいて、前記第1の検出用ギアの回転角度を検出し、
前記第2の検出手段は、前記第2の磁石の磁界強度を検出し、当該検出された第2の磁石の磁界強度に基づいて、前記第2の検出用ギアの回転角度を検出し、
前記判定手段は、前記第1の検出手段により検出された前記第1の磁石の磁界強度及び前記第2の検出手段により検出された前記第2の磁石の磁界強度のうち、少なくとも一方が所定の強度範囲を超える場合に、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定することを特徴とする回転角センサ。 - 請求項1〜7のいずれか1項に記載の回転角センサにおいて、
前記判定手段は、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度のうち、少なくとも一方が操舵角測定範囲を超える場合に、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定することを特徴とする回転角センサ。 - 請求項1〜8のいずれか1項に記載の回転角センサにおいて、
イグニッションキーがキーシリンダから抜かれた時には、前記ステアリングシャフトを所定のロック範囲内でのみ回転可能とするロック手段を備える車両に搭載され、
前記演算手段は、前記イグニッションキーが前記キーシリンダに挿入された際に、前記ステアリングシャフトの第1または第2の回転角度を算出し、且つ、前記ロック範囲に対応するロック基準範囲を算出し、
前記判定手段は、前記イグニッションキーが前記キーシリンダに挿入された際に算出されたステアリングシャフトの第1または第2の回転角度が前記ロック基準範囲を超えた場合には、前記演算手段により算出されたステアリングシャフトの第1の回転角度及び第2の回転角度を異常値と判定することを特徴とする回転角センサ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004134430A JP4518833B2 (ja) | 2004-02-03 | 2004-04-28 | 回転角センサ |
| DE602005016477T DE602005016477D1 (de) | 2004-02-03 | 2005-02-02 | Drehwinkelsensor |
| EP05002133A EP1564110B1 (en) | 2004-02-03 | 2005-02-02 | Rotation angle sensor |
| US11/049,082 US7200515B2 (en) | 2004-02-03 | 2005-02-03 | Rotation angle sensor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004026714 | 2004-02-03 | ||
| JP2004134430A JP4518833B2 (ja) | 2004-02-03 | 2004-04-28 | 回転角センサ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005249769A JP2005249769A (ja) | 2005-09-15 |
| JP4518833B2 true JP4518833B2 (ja) | 2010-08-04 |
Family
ID=34703354
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004134430A Expired - Fee Related JP4518833B2 (ja) | 2004-02-03 | 2004-04-28 | 回転角センサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7200515B2 (ja) |
| EP (1) | EP1564110B1 (ja) |
| JP (1) | JP4518833B2 (ja) |
| DE (1) | DE602005016477D1 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10213224A1 (de) * | 2002-03-25 | 2003-10-16 | Delphi Tech Inc | Lenkstockmodul für ein Kraftfahrzeug |
| JP4567575B2 (ja) | 2005-11-07 | 2010-10-20 | 株式会社東海理化電機製作所 | 回転角度検出装置 |
| JP4746461B2 (ja) * | 2006-03-29 | 2011-08-10 | ナイルス株式会社 | 回転角度検出装置 |
| FR2899862B1 (fr) * | 2006-04-13 | 2009-06-05 | Siemens Vdo Automotive Sas | Procede et dispositif de mesure de la position angulaire, entre deux butees de braquage,d'un volant de direction d'un vehicule |
| EP2020840A2 (en) * | 2006-05-24 | 2009-02-11 | TT Electronics Technology Limited | Multiturn rotational sensor |
| US8278914B2 (en) | 2006-06-14 | 2012-10-02 | The Furukawa Electric Co., Ltd | Rotation angle detector |
| US7841231B2 (en) * | 2006-07-25 | 2010-11-30 | Lg Innotek Co., Ltd. | Steering angle sensing apparatus and method thereof |
| KR100765087B1 (ko) | 2006-12-01 | 2007-10-09 | 현대모비스 주식회사 | 차량의 조향 각 센서 어셈블리 |
| JP2009192456A (ja) * | 2008-02-18 | 2009-08-27 | Panasonic Corp | 回転角度検出装置 |
| US8418662B2 (en) * | 2008-07-18 | 2013-04-16 | Korea Plant Service & Engineering Co., Ltd. | Apparatus for visually inspecting and removing foreign substance from gap of heat tube bundle in upper part of tube sheet of second side of steam generator |
| EP2159549B1 (de) * | 2008-08-27 | 2015-10-07 | SICK STEGMANN GmbH | Vorrichtung zur Messung der Relativposition zwischen einer Massverkörperung und einem Lesekopf |
| CN101376405B (zh) * | 2008-09-05 | 2010-06-02 | 卢灿光 | 一种旋转角度传感器 |
| JP4893721B2 (ja) * | 2008-10-06 | 2012-03-07 | トヨタ自動車株式会社 | 回転角検出装置 |
| JP5016625B2 (ja) * | 2009-03-11 | 2012-09-05 | 株式会社ショーワ | 検出装置及びパワーステアリング装置 |
| KR101096313B1 (ko) * | 2009-05-15 | 2011-12-20 | 주식회사 신창전기 | 차량의 조향각 검출장치 |
| CN101709960B (zh) * | 2009-11-16 | 2012-01-04 | 河南省电力公司商丘供电公司 | 一种袖珍测高测距仪 |
| JP5618885B2 (ja) * | 2011-03-28 | 2014-11-05 | 株式会社ケーヒン | 車両のアクセル開度検出装置 |
| KR101789820B1 (ko) * | 2011-04-15 | 2017-10-25 | 엘지이노텍 주식회사 | 앵글센서 |
| JP6360380B2 (ja) * | 2014-08-06 | 2018-07-18 | 太陽誘電株式会社 | 変位計測装置、信号処理装置および信号処理方法 |
| CN109398484B (zh) * | 2017-08-18 | 2023-08-08 | 凯尔西-海耶斯公司 | 绝对转向角传感器组件 |
| US11926376B2 (en) * | 2018-02-02 | 2024-03-12 | Thyssenkrupp Presta Ag | Run-time stability monitoring of a steering angle sensor based on nonius principle |
| JP7000263B2 (ja) * | 2018-06-20 | 2022-01-19 | 株式会社東海理化電機製作所 | 初期設定方法及び初期設定装置 |
| JP7228405B2 (ja) * | 2019-02-21 | 2023-02-24 | 株式会社ジェイテクト | 制御回路及びモータ制御装置 |
| JP7302274B2 (ja) * | 2019-05-14 | 2023-07-04 | 株式会社ジェイテクト | 回転角検出装置 |
| CN111060000B (zh) * | 2019-12-11 | 2022-04-08 | 维沃移动通信有限公司 | 一种转动角度检测装置、方法及电子设备 |
| KR20210113758A (ko) * | 2020-03-09 | 2021-09-17 | 주식회사 만도 | 조향각 센서의 고장 검출장치 및 그 제어방법 |
| DE102022108293A1 (de) | 2022-04-06 | 2023-10-12 | Schaeffler Technologies AG & Co. KG | Verfahren zur Optimierung der Erfassungsgenauigkeit eines Lenkwinkels |
| KR102667924B1 (ko) * | 2022-06-07 | 2024-05-22 | 현대모비스 주식회사 | 조향각 센서의 고장 진단 장치 및 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001174212A (ja) * | 1999-12-21 | 2001-06-29 | Denso Corp | 回転角度検出センサのフェイルモード調整方法 |
| JP2002531858A (ja) * | 1998-12-04 | 2002-09-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体の角度位置を測定するための方法及び装置 |
| JP2003148949A (ja) * | 2001-11-15 | 2003-05-21 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2003202224A (ja) * | 2001-12-28 | 2003-07-18 | Niles Parts Co Ltd | 回転角検出装置 |
| JP2003269953A (ja) * | 2002-01-08 | 2003-09-25 | Toyota Motor Corp | 車両用操舵装置 |
| JP2003344100A (ja) * | 2002-05-28 | 2003-12-03 | Niles Co Ltd | 回転検出装置及びその製造方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3606234A1 (de) * | 1985-02-26 | 1986-09-18 | Honda Motor Co Ltd | Motorgetriebenes servolenksystem |
| JP2758324B2 (ja) * | 1992-10-30 | 1998-05-28 | 株式会社三協精機製作所 | エンコーダ |
| DE19506938A1 (de) * | 1995-02-28 | 1996-08-29 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Winkelmessung bei einem drehbaren Körper |
| JP3370845B2 (ja) * | 1996-04-30 | 2003-01-27 | 山洋電気株式会社 | アブソリュートエンコーダ |
| DE19962241A1 (de) * | 1999-12-22 | 2001-07-12 | Ruf Electronics Gmbh | Positionssensor |
| JP2005114481A (ja) * | 2003-10-06 | 2005-04-28 | Yazaki Corp | 回転角センサ |
-
2004
- 2004-04-28 JP JP2004134430A patent/JP4518833B2/ja not_active Expired - Fee Related
-
2005
- 2005-02-02 EP EP05002133A patent/EP1564110B1/en not_active Ceased
- 2005-02-02 DE DE602005016477T patent/DE602005016477D1/de not_active Expired - Lifetime
- 2005-02-03 US US11/049,082 patent/US7200515B2/en not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002531858A (ja) * | 1998-12-04 | 2002-09-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 回転体の角度位置を測定するための方法及び装置 |
| JP2001174212A (ja) * | 1999-12-21 | 2001-06-29 | Denso Corp | 回転角度検出センサのフェイルモード調整方法 |
| JP2003148949A (ja) * | 2001-11-15 | 2003-05-21 | Matsushita Electric Ind Co Ltd | 回転角度検出装置 |
| JP2003202224A (ja) * | 2001-12-28 | 2003-07-18 | Niles Parts Co Ltd | 回転角検出装置 |
| JP2003269953A (ja) * | 2002-01-08 | 2003-09-25 | Toyota Motor Corp | 車両用操舵装置 |
| JP2003344100A (ja) * | 2002-05-28 | 2003-12-03 | Niles Co Ltd | 回転検出装置及びその製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE602005016477D1 (de) | 2009-10-22 |
| US20050171727A1 (en) | 2005-08-04 |
| EP1564110A1 (en) | 2005-08-17 |
| US7200515B2 (en) | 2007-04-03 |
| JP2005249769A (ja) | 2005-09-15 |
| EP1564110B1 (en) | 2009-09-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4518833B2 (ja) | 回転角センサ | |
| US8453518B2 (en) | Inductive torque sensor | |
| US5930905A (en) | Method and device for angular measurement of a rotatable body | |
| JP4474872B2 (ja) | 絶対回転角およびトルク検出装置 | |
| KR101497740B1 (ko) | 관통축을 포함하는 비접촉 멀티-회전 절대 위치 자기 센서 | |
| US10647353B2 (en) | Electromechanical power steering system, method for determining an absolute angle of rotation, and method for calibrating a measuring device for measuring an absolute angle of rotation | |
| EP2960141B1 (en) | Steering system | |
| US7471080B2 (en) | Magnetic absolute encoder | |
| EP1325858B1 (en) | Steering apparatus for a vehicle | |
| US7366636B2 (en) | Rotational angle detector | |
| US6519549B1 (en) | Method and device for determining absolute angular position of a rotating body | |
| US20090021246A1 (en) | Rotation angle detection device and rotation angle correction method | |
| US8798861B2 (en) | Electric power steering apparatus | |
| JP2009098094A (ja) | 回転角度検出装置 | |
| US20190346287A1 (en) | Angle computing device and computing device | |
| CN101101222A (zh) | 方向舵偏角传感器 | |
| JP7458144B2 (ja) | 角度演算装置 | |
| US20050075828A1 (en) | Rotation angle sensor | |
| US7201069B2 (en) | Angle sensor | |
| JP4982925B2 (ja) | 回転角度検出装置 | |
| US6697680B2 (en) | Method for compensating signals from an absolute angular position sensor assembly | |
| US20240167805A1 (en) | Method for determining the angular position of a shaft of a motor vehicle | |
| JP4119153B2 (ja) | 回転角度検出装置及び検出方法 | |
| KR100824027B1 (ko) | 차량용 조향축의 조향각 측정장치 및 그 측정 방법 | |
| WO2007094196A1 (ja) | トルク検出装置および回転角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060904 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100427 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100518 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130528 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |