JP4276360B2 - ステレオ画像撮影用システム - Google Patents
ステレオ画像撮影用システム Download PDFInfo
- Publication number
- JP4276360B2 JP4276360B2 JP2000190513A JP2000190513A JP4276360B2 JP 4276360 B2 JP4276360 B2 JP 4276360B2 JP 2000190513 A JP2000190513 A JP 2000190513A JP 2000190513 A JP2000190513 A JP 2000190513A JP 4276360 B2 JP4276360 B2 JP 4276360B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- photographing
- shooting
- camera
- stereo image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Landscapes
- Measurement Of Optical Distance (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Description
【発明の属する技術分野】
本発明は、ステレオ画像撮影用システムに係り、特に、ステレオ画像から三次元データを得るために必要な情報と測定データを容易に得ることができるステレオ画像撮影用システムに関するものである。
【0002】
【従来の技術】
近年では、電子平板に代表されるような測量機とポータブルコンピュータとの組み合わせにより、計測現場の線画図面が作成されていた。このような従来の電子平板では、トータルステーションやGPSなどの測量機を利用してポータブルコンピュータ上で、線画を描画することで図化を行っていた。そして、計測現場の図化を行う際、現地にて現況を見ながら図化したり、別途写真撮影して、それらを見ながらオフィスにて図化を行っていた。また、航空写真などでは、ステレオ撮影していた画像から、解析図化機等を用いて図化を行っていた。そして、地上写真測量においてはステレオ画像から三次元計測する際、従来は、基線長やカメラの向きが厳格に固定されたステレオカメラで撮影、解析、計測を行なっていた。
【0003】
【発明が解決しようとする課題】
しかしながら、従来の技術では、ステレオカメラは基線長等が固定されてしまい、撮影範囲や精度(対象物)が限定された。また、従来において、基線等を固定せず計測を行なおうとすると、ステレオ撮影を行なって三次元解析する際、2枚の画像をオーバーラップさせて撮影しても、ステレオ解析可能な画像とすることは困難であった。すなわち、大抵の場合、解析出来ない画像であったり、解析できても不安定で、精度が悪く、いちじるしく信頼性の低いものであった。特にバルーンや車、その他移動体等にカメラを載せ、撮影する場合、信頼性が高く解析可能な画像を取得するのは大変困難であった。
【0004】
【課題を解決するための手段】
本発明の解決手段によると、
タイミングを示すタイミング信号により対象物の画像を撮影するカメラ及び反射部材が載置されている移動可能な撮影部と、
上記撮影部から離れた位置に置かれ、測定光を上記撮影部の反射部材に向けて放出し、この反射部材から反射された反射光に基づき上記撮影部の位置を測定する測定部と、
撮影対象に関係する撮影条件データに基づき、撮影位置データを演算する撮影位置演算部と、
上記撮影位置演算部により演算された撮影位置データに基づき上記撮影部を所定位置へ移動させる駆動部と、
上記駆動部を制御する移動制御部と、
上記測定部が測定した上記撮影部の位置を示す位置データと、上記撮影位置演算部により演算された撮影位置データとが一致又は略一致した際に、上記撮影部のカメラにタイミング信号を出力する撮影制御部と
を備えたステレオ画像撮影用システムを提供する。
【0005】
【発明の実施の形態】
本発明の実施の形態について以下説明する。
図1に、ステレオ画像撮影用システムの第一の実施の形態の構成図を示す。この実施の形態は、撮影部10、画像データ記憶部30、信号処理部200、測定部100、条件設定部70、撮影位置演算部40、撮影制御部50、移動制御部80、駆動部90を備える。
【0006】
撮影部10は、画像を撮影するカメラと全周プリズムを有する。画像データ記憶部30は、撮影部10のカメラにより撮影された画像データと、測定部100により測定された位置データを対応づけて記憶する。また、信号処理部200は、ステレオ撮影された画像データ及び位置データをもとに三次元計測・解析を行う。測定部100は、測量機であるトータルステーション等が用いられ、撮影部10上のプリズムを視準として、その位置データ(測定値)を計測する。ここで、自動視準トータルステーションを利用することにより、自動計測を行う。条件設定部70は、撮影範囲、精度、カメラの規格値、等の撮影条件を設定する。撮影位置演算部40は、条件設定部70で設定された撮影対象の範囲や必要精度、カメラ・レンズ等の撮影条件に基づき適切な撮影位置を演算する。また、測定部100の予備測定結果に基づき、撮影予定位置を演算、決定する。撮影制御部50は、測定部100が測定した撮影部10の位置データ(測定値)と、撮影位置演算部40により演算された撮影位置データとが一致又は略一致するように、移動制御部80及び駆動部90により撮影部10を移動させる。そして、測定された位置データと演算された撮影位置データとが一致又は略一致した際に、撮影部10及び測定部100に撮影のためのタイミング信号を出力する。また、撮影制御部50は、撮影したタイミングでの位置データ(測定値)を画像データ記憶部30に与える。また、このとき撮影部10から画像データ記憶部30に撮影された画像データが記憶される。移動制御部80は、駆動部90に、撮影部10の移動量を与える。駆動部90は、撮影部10を移動可能とする。
【0007】
図2に、撮影部10の構成図を示す。カメラ1は、市販のフィルムカメラやデジタルカメラ、計測用カメラ等が用いられる。全周プリズム2は、どこからでもその位置を測定部100により計測できるようにプリズムが各方向に多数取り付けられている。さらに、撮影部10は駆動部90により移動可能となっている。
【0008】
つぎに、図3に駆動部の構成図を示す。例えば、その駆動部90は、図3(a)に示すように、車、キャタピラのようなものや、図3(b)に示すようなバルーン、その他移動可能なものに取り付けられ、プラットホームを構成することができる。さらに、撮影部10のカメラ1に後述のような撮影姿勢位置補正部を設け、そこで使用するジャイロセンサや傾斜計を利用して、得られる加速度や角速度を累積演算することもできる。
【0009】
撮影のためのプラットホームには、少なくとも撮影部10が搭載され、さらに、画像データ記憶部30、信号処理部200等が適宜搭載されうる。プラットホームと測定部100との間では、それぞれに設けられた送受信器により、計測指令のための位置、計測データ等の各信号が送受される。これら送受信器は、撮影部10、画像データ記憶部30、その他の適宜の位置に取り付けられる。送受信器は、光送受信器を用いた光通信による伝送の他、適宜の無線又は有線の伝送方式を用いることができる。
【0010】
各構成部の搭載例としては、例えば、プラットホームに測定部100以外の構成部を搭載する場合、プラットホームと測定部100との間は、タイミング信号及び測定された位置データが送受信器により伝送される。また、他の例としては、プラットホームに、撮影部10、駆動部90、移動制御部80、画像データ記憶部30、信号処理部200を搭載し、撮影制御部50、撮影位置演算部40、条件設定部70を測定部100側に搭載してもよい。この場合、プラットホームと測定部側との間は、タイミング信号、測定された位置データ及び移動制御部80の制御信号が送受信器により伝送される。さらに、他の例としては、プラットホーム、測定部100側以外の他のブロックとして、適宜の構成部を搭載してもよい。この場合、例えば、プラットホームに、撮影部10、駆動部90、移動制御部80を、一方、他のブロックに撮影制御部50、撮影位置演算部40、条件設定部70、画像データ記憶部30、信号処理部200を搭載することもできる。
【0011】
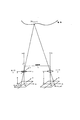
図4は、計測の様子を示す説明図である。この図のように、撮影部10は、ステレオ撮影を行なうために、最低でも2個所以上から撮影をする。そして、撮影部10に搭載された全周プリズム2を用いて、それぞれの撮影位置を測定部100の測量機で計測する。また、計測対象物に最低1個以上基準点を配置すれば、対象物までのカメラ1位置と撮影部10、測定部100の位置関係が正確に測定できる。
【0012】
つぎに、フローチャートに従って自動計測の動作を説明する。図5は、自動計測のフローチャートである。さらに、図6は、自動計測による撮影位置についての説明図である。
まず、測定部100とプラットホーム(撮影部10)を設置する(S100)。測定部100は、計測対象に対して撮影部10の撮影位置が見通せ、かつ邪魔にならない位置へ設置する。例えば、図6の測定部100に示す位置とする。なお、概略の撮影開始位置におけば、より効率的となる。つぎに、計測したい対象物の計測範囲(基準位置)、例えば図6で位置a,bを測定部100によって計測する(S110)。更に、測定部100により撮影部10の全周プリズム2の位置を計測する(S110)。そして、測定部100は、これら計測データを撮影制御部50に転送する。条件設定部70は、撮影対象に関係する撮影条件データを撮影位置演算部40に設定する(S120)。ここで設定するのは、レンズの画角θ、焦点距離f、デジタルカメラの画素ピッチδp、平面方向必要精度δxy、奥行き方向必要精度δz、等である。撮影位置演算部40は、これらの条件により、撮影位置データを演算する(S130)。ここで、撮影位置データの演算について説明する。簡単のために、デジタルカメラは計測対象物に平行であると想定する。撮影位置演算部40では、ステップS120で設定された、撮影部10に取り付けられたデジタルカメラの画素サイズδp、レンズの焦点距離f、画角θ、必要精度により撮影位置が算出される。
【0013】
例えば、計測対象物の平面方向の必要精度δxyとすると撮影距離Hは、
H=δxy×f/δp ▲1▼
奥行き方向をδzとすると、基線長Bは、
B=H×H×δp/(f×δz) ▲2▼
撮影範囲Rは、
R=2Htan(θ/2) ▲3▼
で算出される。オーバーラップ範囲Oは、
O=R−B ▲4▼
となる。
【0014】
これらから、撮影枚数は、
n=エリア/O 余り≠0であればn+1 ▲5▼
となる。
従って、全撮影範囲は、
if 余り=0、全エリア=O×n+2B ▲6▼
if 余り≠0、全エリア=O×(n+1)+2B ▲7▼
計測範囲a〜bは、すべてオーバーラップ領域とすることにより撮影位置が決められる。余り≠0のときは▲7▼式の限りではない。また、オーバーラップ方法もこの限りではない。尚、ステップS120、S130は、あらかじめ撮影範囲がわかっていれば、このステップより前のステップで事前に条件設定し概略計算しておいてもよい。また、必要精度や現場の条件等からレンズやカメラを選択したいときは、現地作業の前にこれら諸条件から最適条件を求め決定しておく。
【0015】
再びフローチャートに戻り説明をする。ステップS130で撮影位置データが演算されると、先に計測したプラットホーム(撮影部10)の位置データと撮影位置演算部40により計算された撮影位置データを撮影制御部50により比較する(S140)。両者が一致又は略一致ならば、撮影信号が適当(OK)と判定され、ステップS180へ進む。OKでなければ、次のステップS145へ進む。ステップS145では、計測した撮影部10を含むプラットホームの位置データ(測定値)と撮影位置演算部40で計算された撮影予定位置との変位量(移動量)を撮影制御部50により計算する。つぎに、撮影制御部50は、移動量を移動制御部80に送る。移動制御部80は、撮影制御部50からの指示に基づき、駆動部90により撮影位置へ撮影部10を移動させる(S150)。移動制御部80は、移動が終了すると、必要に応じて移動終了信号を撮影制御部50に送出する。つぎに、測定部100は、プラットホーム(撮影部10)の位置を計測する(S160)。受信したプラットホーム(撮影部10)の位置データ(測定値)と撮影位置演算部40により計算された撮影位置データ(演算値)を撮影制御部50により比較する(S170)。両者が一致又は略一致ならば、撮影信号が適当(OK)と判定され、ステップS180へ進む。OKでなければ、ステップS145へ進む。ステップS140又はS170で撮影位置がOKであれば、撮影部10により撮影を行なう(S180)。このとき画像データ記憶部30があるシステム構成であれば、画像データ記憶部30に撮影画像データと位置データ(測定値)を同時に書き込みする。つぎに、撮影枚数が条件を満たしていれば、撮影を終了し、次の撮影が必要であれば、ステップS145へ進む(S190)。撮影が終了すれば、信号処理部200で三次元計測を行なうこととなる。以上で、自動的にステレオ画像を撮影することが可能となる。
【0016】
ここで、図7に自動計測のフローチャート中、ステップS110及びS160の撮影部10位置計測の詳細フローチャートを示す。
【0017】
図5のステップS100あるいはS150にて撮影位置へ移動すると、プラットホーム側から、測定部100へ撮影タイミングに合せタイミング信号が送出される(S41)。つぎに、撮影部10の位置を測定部100により計測する(S45)。すなわち、位置計測の指令信号を受信した測定部100は、撮影部10の全周プリズム2を自動視準、位置計測を行なう。測定部100は、位置計測を行なった後、プラットホーム側へ計測位置データを送出する(S46)。画像データ記憶部30は、計測位置データを受け取り、撮影された画像データと関連付けて記憶する(S48)。以上の作業は、自動で行なうことが可能である。
【0018】
ここで、ステレオ法による三次元計測の基本原理について示す。図8に、ステレオ法の説明図を示す。ここでは、簡単のために、同じCCDカメラを2台使用する。それぞれの光軸は平行で、カメラレンズの主点からCCD面までの距離aが等しいものとする。さらに、CCDは光軸に直角に置かれているものとする。これらの条件を用いて、ステレオ法の原理について以下に説明する。
【0019】
2つの光軸間距離(基線長)をLとする。物体上の点P1(x1、y1)、P2(x2、y2)の座標の間には、以下のような関係がある。
x1=ax/z (1)
y1=y2=ay/z (2)
x2−x1=a×L/z (3)
但し、全体の座標系(x、y、z)の原点をカメラ1のレンズ主点にとるものとする。(3)式よりzを求める。この結果から(1)式、(2)式よりx、yが求められる。
【0020】
ステレオ撮影する際には、取得された2枚の画像(オーバーラップ画像)によりステレオモデルが形成できるような撮影としなければならない。さらに計測精度を向上させるためには、なるべく適切な条件で撮影をする必要がある。そのために撮影部10上のカメラ1をx,y,zの3軸方向に制御、更に上下動が可能であり、レンズ倍率も可変の構造とした撮影姿勢位置補正部6を上記撮影部10のカメラ1に設けることができる。
【0021】
図9に、撮影姿勢位置補正部を有する撮影部の構成図を示す。この構成は、カメラ1、撮影姿勢位置補正部6を備える。
撮影姿勢位置補正部6は、カメラ1の姿勢、向きをセンサー(ジャイロ等)により計測して、その姿勢、向きを補正する。その結果、計測対象物に対してステレオ計測が容易となるように保たれた撮影データ位置のデータにより、かなり信頼性の高い計測が可能となる。あるいは、カメラ1の姿勢、向きをそれらセンサーにより計測して信号処理部200にて姿勢、向きを計算補正すれば自動三次元計測が可能となる。さらに、撮影姿勢位置補正部6には、3軸方向(方位、傾斜角)を計測するセンサ部と3軸及び上下方向に可変な可動部があり、更にカメラレンズの倍率制御も行なうことができる。
【0022】
3軸方向の計測は、傾斜計や方向計等、各種の姿勢センサを使用することにより行なう。あるいは、整準台に撮影部10のカメラ1を載せることによって3軸方向を補正しても良い。上下方向及び倍率補正は、これらのセンサを使用したり、あるいはGPS500等も使用できるが、測定部100の計測値を利用することによって、さらに精度良く補正できる。
【0023】
これらを以下説明する。図10に、上下方向の補正についての説明図を示す。図10(a)に示されるように、2つの撮影位置で高低差がついたとき、撮影される上下の範囲が異なってしまい計測に不具合な画像となってしまう。撮影部10位置を測定部100で計測する際に、高低差がわかる。撮影姿勢位置補正部6は、この3次元データをもとに撮影部10のカメラ1の上下動を行うことで、図10(b)のような適切な高さに移動させる。
【0024】
図11に、水平(左右)方向の補正についての説明図を示す。図11(a)に示されるように、水平方向に移動するにつれ、オーバーラップする部分が減少する。所定の位置に撮影部10をうまく制御できればよい。しかし、なんらかの原因から撮影部10を適切な位置に持っていけない場合、カメラ1を所定の計測範囲の方向へ向け、撮影を行なう(図11(b))。撮影位置補正部6のジャイロによってその方位を知ることができるので、これと測定部100により計測した撮影位置により、適切な方向を計算し、その方向へ撮影部10のカメラ1を向ける。
【0025】
図12に、スイング方向(傾斜)の補正についての説明図を示す。進行方向の上下あるいは、左右に傾斜があった場合、撮影画像は図12(a)、(b)のようになる。
上下方向は、例えば図12(c)に図示するような状態に撮影部10がなった場合である。
これらを回避させるために、撮影姿勢位置補正部6の上下−左右方向の傾斜計により、カメラ1の傾斜分を計測し、補正させて撮影させる。
【0026】
図13に、倍率の補正についての説明図を示す。図13(a)に示されるように、2枚の画像で倍率が異なると不具合が生じる。例えば、2枚目の画像を図13(b)の撮影部10と撮影部10’の位置で撮影しなければならないときに何らかの理由で撮影部10’の位置で撮影できず、撮影部10’’の位置に来た場合等がある。この場合は、測定部100により撮影部10から計測対象物までの距離がわかるので、撮影姿勢位置補正部6は、カメラ1のレンズの倍率を調整する。これにより、2枚の画像の倍率の違いを補正し、計測範囲を適切にして撮影を行なう。
【0027】
このように、撮影部10のカメラ1に撮影姿勢補正部6を設け、各種姿勢センサーと測定部の計測値を用いることにより、ステレオ撮影に適した撮影条件とすることが可能となる。
【0028】
つぎに、障害物検出について説明する。計測したい範囲の撮影位置に障害物があった場合、測定部100にノンプリズムトータルステーション(TS)を使うことによって、以下の手順により障害物を回避させ撮影することが可能となる。
【0029】
図14に、障害物検出のための計測フローチャートを示す。また、図15に、障害物検出の説明図を示す。この障害物検出の処理は、自動測定の処理の前又は途中に適宜実行することができる。以下、図14のフローチャートに従って説明する。
最初に、測定部100とプラットホーム(撮影部10)を適当な位置に設定する(S200)。条件設定部70により、撮影条件を設定する(S210)。このとき図5のステップS110で設定している撮影パラメータ以外に、測定対象範囲a〜b(図6参照)を概略入力する。測定範囲の基準位置をノンプリズムTSによって測定する(S220)。測定範囲の基準位置は、測定対象範囲a〜bが入力してあれば、始点、終点の区別がつけば、どちらか一点でも良いし、両方でも良い。さらに、計測を確実にするために、ここで撮影部10位置も計測する。但し、プリズム程の反射物体が測定対象物に無い場合は、次のステップS230の自動スキャンで撮影部10の位置を計測しても良い。撮影部10の位置は、全周プリズム2により、ノンプリズムTSの受光光量が一番強い所で検出される。しかしながら、ここでプラットホーム(撮影部10)の位置計測等を行うことにより、作業の短縮化(スキャンニング検出時間)が可能となる。つぎに、ノンプリズムTSを測定範囲内で自動スキャンニングさせる(S230)。このときに、障害物位置(図15の領域300)を自動検出する。障害物検出は、ノンプリズムTSによる測距値が大きく不連続となる点(図15のラインc、d)とそれら距離の連続性によって検出することが可能である。つぎに、撮影条件、測定範囲基準位置より撮影位置の計算を行なう(S240)。撮影位置の計算後、障害物検出範囲と撮影位置が重複していないか、さらに予定移動ルートに障害物がないか計算する。仮に撮影位置と障害物が重複する場合は、撮影可能位置とレンズ倍率より等価撮影位置を決定する(例えば図15の撮影部の10’の位置)。対象物に近づくときは広角側に、遠ざかる場合は望遠側に調整する。調整しきれないときは、さらに水平方向のカメラ1の角度を計算し、図11(b)のようにカメラ1を水平方向に動かす。撮影位置移動ルートに障害物がある場合は、障害物の手前を回避ルートと設定して移動する。これ以降の処理は、図5の自動計測フローチャートのステップS140からの処理と同様になる。
【0030】
以上説明してきたように、本発明によれば、今まで三次元計測するためのステレオ撮影が困難であったものを簡便かつ信頼性高く行なうことが可能となり、更に自動化が行なえるようになる。
【0031】
【発明の効果】
本発明によると、以上のように、通常のカメラで三次元計測する際に、安定して、信頼性が高く、かつ精度良いステレオ画像を容易に取得することができる。
【図面の簡単な説明】
【図1】自動計測の全体構成図。
【図2】撮影部の構成図。
【図3】駆動部の構成図。
【図4】計測の様子の説明図。
【図5】自動計測のフローチャート。
【図6】撮影位置の説明図。
【図7】位置計測のフローチャート。
【図8】ステレオ法の説明図。
【図9】撮影部のカメラの構成図。
【図10】上下方向補正の説明図。
【図11】左右方向補正の説明図。
【図12】スイング方向(傾斜)補正の説明図。
【図13】倍率の補正の説明図。
【図14】障害物検出のフローチャート。
【図15】障害物検出時の計測の説明図。
【符号の説明】
10 撮影部
30 画像データ記憶部
40 撮影位置演算部
50 撮影制御部
70 条件設定部
80 移動制御部
90 駆動部
100 測定部
200 信号処理部
Claims (11)
- タイミングを示すタイミング信号により対象物の画像を撮影するカメラ及び反射部材が載置されている移動可能な撮影部と、
上記撮影部から離れた位置に置かれ、測定光を上記撮影部の反射部材に向けて放出し、この反射部材から反射された反射光に基づき上記撮影部の位置を測定する測定部と、
撮影対象に関係する撮影条件データに基づき、撮影位置データを演算する撮影位置演算部と、
上記撮影位置演算部により演算された撮影位置データに基づき上記撮影部を所定位置へ移動させる駆動部と、
上記駆動部を制御する移動制御部と、
上記測定部が測定した上記撮影部の位置を示す位置データと、上記撮影位置演算部により演算された撮影位置データとが一致又は略一致した際に、上記撮影部のカメラにタイミング信号を出力する撮影制御部と
を備えたステレオ画像撮影用システム。 - 請求項1に記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、少なくとも2カ所でのステレオ撮影を行い、
上記測定部は、その撮影された少なくとも2カ所の位置の測定を行うことを特徴とするステレオ画像撮影用システム。 - 請求項1又は2に記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、上記駆動部の移動に応じて、ステレオ撮影に適した条件を維持するように、向き、上下、倍率の少なくともいずれかの撮影条件を変更可能とするための位置補正部を
さらに備えたステレオ画像撮影用システム。 - 請求項1乃至3のいずれかに記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、上記駆動部による移動の高低に応じて、ステレオ撮影に適した条件を維持するように、撮影条件としてのカメラの上下方向の向きを調整可能に構成されていることを特徴とするステレオ画像撮影用システム。 - 請求項1乃至4のいずれかに記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、上記駆動部による移動の距離に応じてステレオ撮影に適した条件を維持するように、撮影条件としてのカメラの水平方向の向きを調整可能に構成されていることを特徴とするステレオ画像撮影用システム。 - 請求項1乃至5のいずれかに記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、上記駆動部による移動の際の上記撮影部の傾斜に応じてステレオ撮影に適した条件を維持するように、撮影条件としてのカメラのスウイング方向の向きを調整可能に構成されていることを特徴とするステレオ画像用撮影システム。 - 請求項1乃至6のいずれかに記載のステレオ画像撮影用システムにおいて、
上記撮影部のカメラは、撮影対象からカメラまでの距離に応じてステレオ撮影に適した条件を維持するように、撮影条件としてのカメラの倍率を調整可能に構成されていることを特徴とするステレオ画像撮影用システム。 - 請求項1乃至7のいずれかに記載のステレオ画像撮影用システムにおいて、
上記測定部は、撮影対象範囲及び撮影位置近傍の障害物を検出する予備測定を行い、その予備測定の結果に基づき、上記撮影位置演算部は、撮影予定位置を演算して決定するように構成されていることを特徴とするステレオ画像撮影用システム。 - 請求項1乃至8のいずれかに記載のステレオ画像撮影用システムにおいて、
上記測定部は、さらに、測定された撮影位置の位置データを上記撮影部側に送出するように構成されたことを特徴とするステレオ画像撮影用システム。 - 請求項1乃至9のいずれかに記載のステレオ画像撮影用システムにおいて、
上記測定部により測定された位置データと上記撮影部のカメラで撮影された撮影画像データとを関連付けて記憶するための画像記憶部を
さらに備えたステレオ画像撮影用システム。 - 請求項1乃至10のいずれかに記載のステレオ画像撮影用システムにおいて、
撮影のためのプラットホームに、少なくとも上記撮影部、上記駆動部、上記移動制御部が搭載され、
上記プラットホームと上記測定部との間とのデータの送出のための送受信器を
さらに備えたステレオ画像撮影用システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000190513A JP4276360B2 (ja) | 2000-06-26 | 2000-06-26 | ステレオ画像撮影用システム |
| US09/887,267 US6611664B2 (en) | 2000-06-26 | 2001-06-25 | Stereo image photographing system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000190513A JP4276360B2 (ja) | 2000-06-26 | 2000-06-26 | ステレオ画像撮影用システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002006424A JP2002006424A (ja) | 2002-01-09 |
| JP4276360B2 true JP4276360B2 (ja) | 2009-06-10 |
Family
ID=18689968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000190513A Expired - Fee Related JP4276360B2 (ja) | 2000-06-26 | 2000-06-26 | ステレオ画像撮影用システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4276360B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002010297A (ja) * | 2000-06-26 | 2002-01-11 | Topcon Corp | ステレオ画像撮影システム |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6367522B2 (ja) | 2013-02-28 | 2018-08-01 | 株式会社トプコン | 航空写真システム |
| JP5882951B2 (ja) | 2013-06-14 | 2016-03-09 | 株式会社トプコン | 飛行体誘導システム及び飛行体誘導方法 |
| JP6316568B2 (ja) | 2013-10-31 | 2018-04-25 | 株式会社トプコン | 測量システム |
| JP6326237B2 (ja) | 2014-01-31 | 2018-05-16 | 株式会社トプコン | 測定システム |
| JP6490401B2 (ja) | 2014-11-12 | 2019-03-27 | 株式会社トプコン | 傾斜検出システム及び傾斜検出方法 |
-
2000
- 2000-06-26 JP JP2000190513A patent/JP4276360B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002010297A (ja) * | 2000-06-26 | 2002-01-11 | Topcon Corp | ステレオ画像撮影システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002006424A (ja) | 2002-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8224030B2 (en) | Position measuring method and position measuring instrument | |
| JP7022559B2 (ja) | 無人航空機の制御方法および無人航空機の制御用プログラム | |
| JP3731123B2 (ja) | 物体の位置検出方法及び装置 | |
| JP6994879B2 (ja) | 測量システム | |
| US6611664B2 (en) | Stereo image photographing system | |
| KR100888716B1 (ko) | 지피에스 수신기와 항공촬영 정보를 이용한 지아이에스수치지도 보정시스템 | |
| JP5650942B2 (ja) | 点検システムおよび点検方法 | |
| JP6823482B2 (ja) | 三次元位置計測システム,三次元位置計測方法,および計測モジュール | |
| CN112334733B (zh) | 拍摄装置的校正装置、监视装置、作业机械及校正方法 | |
| JP6930840B2 (ja) | 測量システム | |
| JP2022171677A5 (ja) | ||
| JP2019132769A (ja) | 測量システム | |
| JP7050425B2 (ja) | 測量システム | |
| KR102152720B1 (ko) | 3차원 모델링용 촬영장치 및 촬영방법 | |
| JP4276360B2 (ja) | ステレオ画像撮影用システム | |
| US20180003820A1 (en) | Three-dimensional position measuring system, three-dimensional position measuring method, and measuring module | |
| JP4430789B2 (ja) | ステレオ画像撮影用のシステム | |
| JP2002010297A (ja) | ステレオ画像撮影システム | |
| JP2016139914A (ja) | 表示装置、携帯端末及び制御方法 | |
| JP2622089B2 (ja) | 測量装置 | |
| JP2010043961A (ja) | 三次元画像計測システム | |
| JP2003042760A (ja) | 計測装置、計測方法及び計測システム | |
| JP3122777B2 (ja) | 無人走行車の測距装置 | |
| JP2021169989A (ja) | 自己位置測定システム、車両、及び、自己位置測定方法 | |
| JPH112521A (ja) | 傾斜センサを備えた位置計測作図装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080416 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090303 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090306 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4276360 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120313 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120313 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130313 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130313 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140313 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |