JP3705227B2 - 車輌用自動操舵装置 - Google Patents
車輌用自動操舵装置 Download PDFInfo
- Publication number
- JP3705227B2 JP3705227B2 JP2002060749A JP2002060749A JP3705227B2 JP 3705227 B2 JP3705227 B2 JP 3705227B2 JP 2002060749 A JP2002060749 A JP 2002060749A JP 2002060749 A JP2002060749 A JP 2002060749A JP 3705227 B2 JP3705227 B2 JP 3705227B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- auxiliary turning
- target
- torque
- automatic steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008859 change Effects 0.000 claims description 15
- 238000004260 weight control Methods 0.000 claims description 9
- 238000006243 chemical reaction Methods 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 238000013459 approach Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000006557 surface reaction Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
- B62D6/008—Control of feed-back to the steering input member, e.g. simulating road feel in steer-by-wire applications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/008—Changing the transfer ratio between the steering wheel and the steering gear by variable supply of energy, e.g. by using a superposition gear
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
【発明の属する技術分野】
本発明は、自動車等の車輌の操舵装置に係り、更に詳細には必要に応じて操舵輪を自動的に操舵する自動操舵装置に係る。
【0002】
【従来の技術】
例えば特開平11−78949号公報に記載されている如く、電動式パワーステアリング装置の電動機の駆動トルクにより、運転者による操舵時に操舵アシストを行うと共に、必要に応じてステアリングホイールに対し相対的に操舵輪を転舵して自動操舵を行うよう構成された電動式パワーステアリング装置が従来より知られている。
【0003】
【発明が解決しようとする課題】
上記公開公報に記載された電動式パワーステアリング装置によれば、一つの電動機により操舵アシストを行うと共に必要に応じて自動操舵を行うことができるが、電動式パワーステアリング装置が操舵輪を転舵する際に発生する反力トルクがステアリングホイールに伝達されること及びこれに起因して運転者が違和感を感じることを防止することが困難であり、また運転者による操舵と自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクが急激に変化するという問題がある。
【0004】
この問題を解消すべく、例えば特開平5−777751号公報に記載されている如く、ステアリングホイールと操舵輪との間の操舵系に設けられ、ステアリングホイールに対し相対的に操舵輪を転舵駆動する転舵駆動手段としての伝達比可変装置(転舵角可変機構)と、操舵系に設けられた操舵補助力発生手段としての動力操舵装置とを有し、伝達比可変装置によって操舵輪を転舵駆動することにより操舵輪を自動操舵すると共に、自動操舵時に伝達比可変装置により発生される反力トルクを動力操舵装置による操舵補助力により打ち消すよう構成された自動操舵装置が従来より知られている。
【0005】
しかしこの種の自動操舵装置に於いては、自動操舵時に伝達比可変装置により発生される反力トルクを正確に推定することが困難であるため、動力操舵装置による操舵補助力によって反力トルクを正確に打ち消すことが困難であり、そのため運転者が違和感を感じることを効果的に防止することが困難であり、また運転者による操舵と自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクが変化することを効果的に防止することも困難である。
【0006】
本発明は、ステアリングホイールと操舵輪との間の操舵系に設けられステアリングホイールに対し相対的に操舵輪を補助転舵する補助転舵手段と、操舵系に設けられ操舵輪の転舵を補助する補助転舵力を発生する補助転舵力発生手段とを有するセミステアバイワイヤ式の車輌用自動操舵装置に於ける上述の如き問題に鑑みてなされたものであり、本発明の主要な課題は、自動操舵時にはステアリングホイールに作用するトルクが自動操舵時の目標トルクになるよう補助転舵力発生手段を制御することにより、自動操舵時に運転者が違和感を感じることを効果的に防止すると共に、運転者による操舵と自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクの変化を効果的に低減することである。
【0007】
【課題を解決するための手段】
上述の主要な課題は、本発明によれば、請求項1の構成、即ちステアリングホイールと操舵輪との間の操舵系に設けられ前記ステアリングホイールに対し相対的に前記操舵輪を補助転舵し自動操舵する補助転舵手段と、前記操舵系に設けられ前記操舵輪の転舵を補助する補助転舵力を発生する補助転舵力発生手段と、前記補助転舵手段及び前記補助転舵力発生手段を制御する制御手段とを有するセミステアバイワイヤ式の車輌用自動操舵装置にして、前記制御手段は前記補助転舵手段の目標補助転舵量を演算する目標補助転舵量演算手段と、前記操舵系のトルクを検出する手段と、前記検出されたトルクに基づき前記ステアリングホイールに作用するトルクを非自動操舵時の目標トルクに制御するための第一の目標補助転舵力を演算する第一の目標補助転舵力演算手段と、前記目標補助転舵量及び車輌の走行状態に基づき前記ステアリングホイールに作用するトルクを自動操舵時の目標トルクに制御するための第二の目標補助転舵力を演算する第二の目標補助転舵力演算手段と、前記第一及び第二の目標補助転舵力の重み和として最終目標補助転舵力を演算する最終目標補助転舵力演算手段と、前記目標補助転舵量に基づいて前記補助転舵手段を制御する補助転舵制御手段と、前記最終目標補助転舵力に基づいて前記補助転舵力発生手段を制御する補助転舵力制御手段と、自動操舵時には非自動操舵時に比して前記第一の目標補助転舵力の重みを小さくすると共に前記第二の目標補助転舵力の重みを大きくする重み制御手段とを有することを特徴とする車輌用自動操舵装置によって達成される。
【0008】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項1の構成に於いて、前記重み制御手段は非自動操舵時には前記第二の目標補助転舵力の重みを0に設定し、自動操舵時には前記第一の目標補助転舵力の重みを0に設定し、非自動操舵時と自動操舵時との間の変化時には前記第一及び第二の目標補助転舵力の重みを徐々に変化させるよう構成される(請求項2の構成)。
【0009】
また本発明によれば、上述の主要な課題を効果的に達成すべく、上記請求項2の構成に於いて、前記制御手段は前記操舵輪が路面より受けるセルフアライニングトルクを求める手段を有し、前記重み制御手段はセルフアライニングトルクの大きさが大きいほど前記第一及び第二の目標補助転舵力の重みの変化勾配を小さくするよう構成される(請求項3の構成)。
【0010】
【発明の作用及び効果】
上記請求項1の構成によれば、検出された操舵系のトルクに基づきステアリングホイールに作用するトルクを非自動操舵時の目標トルクに制御するための第一の目標補助転舵力が演算され、補助転舵手段の目標補助転舵量及び車輌の走行状態に基づきステアリングホイールに作用するトルクを自動操舵時の目標トルクに制御するための第二の目標補助転舵力が演算され、第一及び第二の目標補助転舵力の重み和として最終目標補助転舵力が演算され、目標補助転舵量に基づいて補助転舵手段が制御されると共に、最終目標補助転舵力に基づいて補助転舵力発生手段が制御され、自動操舵時には非自動操舵時に比して第一の目標補助転舵力の重みを小さくされると共に第二の目標補助転舵力の重みが大きくされるので、非自動操舵時にはステアリングホイールに作用するトルクを非自動操舵時の目標トルクに近い値に制御し、自動操舵時にはステアリングホイールに作用するトルクを自動操舵時の目標トルクに近い値に制御することができ、従って自動操舵時の目標トルクを補助転舵手段の目標補助転舵量及び車輌の走行状態に基づいて適宜に設定することにより、自動操舵時に運転者が違和感を感じることを効果的に防止することができる。
【0011】
特に上記請求項2の構成によれば、非自動操舵時には第二の目標補助転舵力の重みが0に設定され、自動操舵時には第一の目標補助転舵力の重みが0に設定され、非自動操舵時と自動操舵時との間の変化時には第一及び第二の目標補助転舵力の重みが徐々に変化されるので、運転者による操舵と自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクの変化を効果的に低減することができる。
【0012】
また一般に、上記請求項1の構成に従って補助転舵力発生手段が制御される場合には、操舵輪が路面より受けるセルフアライニングトルクの大きさが大きいほど自動操舵と非自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクの変化が大きくなる。
【0013】
上記請求項3の構成によれば、操舵輪が路面より受けるセルフアライニングトルクが求められ、セルフアライニングトルクの大きさが大きいほど第一及び第二の目標補助転舵力の重みの変化勾配が小さくされるので、セルフアライニングトルクの大きさが大きいほど自動操舵と非自動操舵との間に操舵モードが変化する際に於ける第一及び第二の目標補助転舵力の重みの変化がゆっくりと行われるので、セルフアライニングトルクの大きさに拘わらず自動操舵と非自動操舵との間に操舵モードが変化する際に運転者がステアリングホイールより感じるトルクが急激に変化することを確実に且つ効果的に低減することができる。
【0014】
【課題解決手段の好ましい態様】
本発明の一つの好ましい態様によれば、上記請求項1の構成に於いて、制御手段は操舵輪のセルフアライニングトルクを求める手段と、運転者の操舵状況を検出する手段とを有し、第二の目標補助転舵力演算手段は補助転舵手段が目標補助転舵量に基づいて操舵輪を補助転舵し自動操舵する際の反力がステアリングホイールに作用することを防止する力と、セルフアライニングトルクを相殺してセルフアライニングトルクがステアリングホイールへ伝達されることを防止する力と、運転者の操舵状況に応じて発生することが望ましい操舵トルクを発生させる力とに基づき第二の目標補助転舵力を演算するよう構成される(好ましい態様1)。
【0015】
本発明の他の一つの好ましい態様によれば、上記好ましい態様2の構成に於いて、運転者の操舵状況を検出する手段は操舵角を検出する手段であり、第二の目標補助転舵力演算手段は操舵角に基づき運転者の操舵状況に応じて発生することが望ましい操舵トルクを発生させる力を演算するよう構成される(好ましい態様2)。
【0016】
本発明の他の一つの好ましい態様によれば、上記請求項1の構成に於いて、重み制御手段は目標補助転舵量に基づいて自動操舵時であるか非自動操舵時であるかを判定するよう構成される(好ましい態様3)。
【0017】
本発明の他の一つの好ましい態様によれば、上記請求項1乃至3の何れかの構成に於いて、第一の目標補助転舵力の重み及び第二の目標補助転舵力の重みの和は一定であるよう構成される(好ましい態様4)。
【0018】
本発明の他の一つの好ましい態様によれば、上記請求項1又は2の構成に於いて、第一の目標補助転舵力の重み及び第二の目標補助転舵力の重みの和は一定であり、重み制御手段は目標補助転舵量の大きさが大きくなるにつれて第二の目標補助転舵力の重みが漸次大きくなるよう、目標補助転舵量の大きさに応じて第二の目標補助転舵力の重みを可変設定するよう構成される(好ましい態様5)。
【0019】
本発明の他の一つの好ましい態様によれば、上記請求項3の構成に於いて、第一の目標補助転舵力の重み及び第二の目標補助転舵力の重みの和は一定であり、重み制御手段は操舵輪が路面より受ける力に起因するセルフアライニングトルクを検出する手段を有し、目標補助転舵量の大きさが大きくなるにつれて第二の目標補助転舵力の重みが漸次大きくなるよう、目標補助転舵量の大きさに応じて第二の目標補助転舵力の重みを可変設定すると共に、セルフアライニングトルクの大きさが大きいほど目標補助転舵量の変化量に対する第二の目標補助転舵力の重みの変化量の大きさが小さくなるよう、セルフアライニングトルクの大きさに応じて第二の目標補助転舵力の重みを可変設定するよう構成される(好ましい態様6)。
【0020】
本発明の他の一つの好ましい態様によれば、上記請求項1の構成に於いて、補助転舵力発生手段は補助転舵手段と操舵輪との間の操舵系に設けられるよう構成される(好ましい態様7)。
【0021】
本発明の他の一つの好ましい態様によれば、上記好ましい態様7の構成に於いて、操舵系はステアリングホイールに連結された第一のステアリングシャフト及び第二のステアリングシャフトを含み、補助転舵手段は第一及び第二のステアリングシャフトの一方に連結されたハウジングと第一及び第二のステアリングシャフトの他方に連結されハウジングに対し相対回転する回転子とを有する補助転舵用電動機を含み、第一のステアリングシャフトに対し相対的に第二のステアリングシャフトを回転駆動するよう構成される(好ましい態様8)。
【0022】
本発明の他の一つの好ましい態様によれば、上記好ましい態様8の構成に於いて、目標補助転舵量演算手段は第一のステアリングシャフトに対する第二のステアリングシャフトの目標相対回転角度として補助転舵手段の目標補助転舵量を演算するよう構成される(好ましい態様9)。
【0023】
本発明の他の一つの好ましい態様によれば、上記請求項1の構成に於いて、転舵力発生手段は電動式パワーステアリング装置であるよう構成される(好ましい態様10)。
【0024】
【発明の実施の形態】
以下に添付の図を参照しつつ、本発明を好ましい実施形態について詳細に説明する。
【0025】
図1は転舵角可変装置及び電動式パワーステアリング装置を備えたセミステアバイワイヤ式の車輌に適用された本発明による車輌用自動操舵装置の一つの実施形態を示す概略構成図である。
【0026】
図1に於て、10FL及び10FRはそれぞれ車輌12の左右の前輪を示し、10RL及び10RRはそれぞれ車輌の左右の後輪を示している。操舵輪である左右の前輪10FL及び10FRは運転者によるステアリングホイール14の操作に応答して駆動されるラック・アンド・ピニオン型の電動式パワーステアリング装置16によりラックバー18及びタイロッド20L及び20Rを介して転舵される。
【0027】
図示の実施形態に於いては、電動式パワーステアリング装置16はラック同軸型の電動式パワーステアリング装置であり、電動機22と、電動機22の回転トルクをラックバー18の往復動方向の力に変換する例えばボールねじ式の変換機構24とを有し、ハウジング26に対し相対的にラックバー18を駆動する補助転舵力を発生することにより、運転者の操舵負担を軽減する補助転舵力発生手段として機能する。尚補助転舵力発生手段は当技術分野に於いて公知の任意の構成のものであってよく、また後述の転舵角可変装置30より左右前輪側に於いて補助転舵力を発生することが好ましいが、転舵角可変装置30よりステアリングホイール14の側に於いて補助転舵力を発生するよう配設されてもよい。
【0028】
ステアリングホイール14は第一のステアリングシャフトとしてのアッパステアリングシャフト28A、転舵角可変装置30、第二のステアリングシャフトとしてのロアステアリングシャフト28B、ジョイント32を介して電動式パワーステアリング装置16のピニオンシャフト34に駆動接続されている。図示の実施形態に於いては、転舵角可変装置30はハウジング36Aの側にてアッパステアリングシャフト28Aの下端に連結され、回転子36Bの側にてロアステアリングシャフト28Bの上端に連結された補助転舵駆動用の電動機36を含んでいる。
【0029】
かくして転舵角可変装置30は第一のステアリングシャフトに対し相対的に第二のステアリングシャフトを回転駆動することにより、操舵輪である左右の前輪10FL及び10FRをステアリングホイール14に対し相対的に補助転舵駆動する補助転舵手段として機能する。
【0030】
特に転舵角可変装置30は、通常時にはハウジング36A及び回転子36Bの相対回転を阻止する保持電流が電動機36に通電されることにより、アッパステアリングシャフト22Aに対するロアステアリングシャフト22Bの相対回転角度(単に相対回転角度という)を0に維持するが、自動操舵時には電動機36によりアッパステアリングシャフト22Aに対し相対的にロアステアリングシャフト22Bを積極的に回転させ、これにより運転者の操舵操作に依存せずに左右の前輪10FL及び10FRを自動操舵する。
【0031】
図示の実施形態に於ては、アッパステアリングシャフト22Aには該アッパステアリングシャフトの回転角度を操舵角θsとして検出する操舵角センサ40及び操舵トルクTsを検出するトルクセンサ42が設けられており、ロアステアリングシャフト22Bには該ロアステアリングシャフトの回転角度を左右前輪の実操舵角θaとして検出する操舵角センサ44が設けられており、これらのセンサの出力は操舵制御装置46へ供給される。操舵制御装置46には車速センサ48により検出された車速Vを示す信号及びヨーレートセンサ50により検出された車輌のヨーレートγを示す信号も入力される。
【0032】
尚操舵角θaを示す信号及び車速Vを示す信号は操舵制御装置46より転舵角可変装置30を制御する転舵角可変制御装置52にも入力され、操舵トルクTsを示す信号及び車速Vを示す信号は操舵制御装置46より電動式パワーステアリング装置16を制御する電動パワーステアリング(電動PS)制御装置54にも入力される。また操舵角センサ44により検出される操舵角θaを示す信号は自動操舵完了後に左右の前輪10FL及び10FRの直進位置をステアリングホイール14の中立位置に合せるために使用される。
【0033】
後述の如く、操舵制御装置46は車輌の目標ヨーレートγtを演算すると共に、目標ヨーレートγtとヨーレートセンサ50により検出された車輌のヨーレートγとの偏差Δγを低減するための転舵角可変装置30の目標補助転舵量としてアッパステアリングシャフト22Aに対するロアステアリングシャフト22Bの目標相対回転角度θrを演算し、目標相対回転角度θrを示す指令信号を転舵角可変制御装置52へ出力する。
【0034】
また操舵制御装置46は左右前輪の路面反力によるセルフアライニングトルクTsatを演算し、操舵角θsに基づきステアリングホイールの目標トルクTswを演算し、目標相対回転角度θr、セルフアライニングトルクTsat、目標トルクTswに基づき自動操舵時の目標トルクTtcを演算し、目標トルクTtcに基づき自動操舵時に於ける電動パワーステアリング制御装置54の電動機22に対するトルク制御用目標電流Itcを第二の目標補助転舵力に対応する目標電流として演算し、トルク制御用目標電流Itcを示す指令信号を電動パワーステアリング制御装置54へ出力する。
【0035】
転舵角可変制御装置52は運転者による通常操舵時には転舵角可変装置30の相対回転角度を0に維持し、操舵制御装置46より目標相対回転角度θrを示す信号が入力されたときには、ロアステアリングシャフト22Bがアッパステアリングシャフト22Aに対し相対的に目標相対回転角度θr回転するよう目標相対回転角度θrに基づき転舵角可変装置30の電動機36を制御し、これにより左右の前輪10FL及び10FRを自動操舵し、車輌のヨーレート偏差Δγを低減して車輌の旋回時の走行安定性を向上させる。
【0036】
電動パワーステアリング制御装置54は操舵トルクTs及び車速Vに応じて運転者の操舵負荷を軽減するための電動式パワーステアリング装置16の電動機22に対する補助転舵用目標電流Ipsを第一の目標補助転舵力に対応する目標電流として演算し、目標相対回転角度θrに基づきトルク制御用目標電流Itcの重みωを演算し、重みωに基づく補助転舵用目標電流Ips及びトルク制御用目標電流Itcの重み和として最終目標電流Itを演算し、最終目標電流Itに基づき電動式パワーステアリング装置16の電動機22を制御する。
【0037】
特に図示の実施形態に於いては、電動パワーステアリング制御装置54は補助転舵用目標電流Ipsの重みを(1−ω)とし、トルク制御用目標電流Itcの重みをωとして最終目標電流Itを演算し、非自動操舵時には重みωを0に設定し、自動操舵時には重みωを1に設定し、目標相対回転角度θrの大きさが大きいほど重みωが1に近づくよう目標相対回転角度θrの大きさに応じて重みωを可変設定することにより、操舵モードが非自動操舵時と自動操舵時との間に変化する際には重みωを徐々に変化させる。
【0038】
また電動パワーステアリング制御装置54はセルフアライニングトルクTsatの大きさが大きいほど目標相対回転角度θrの変化量に対する重みωの変化量の比を小さくすることにより、セルフアライニングトルクTsatの大きさが大きいほど操舵モードが非自動操舵時と自動操舵時との間に変化する際に於ける重みωの変化速度を小さくする。
【0039】
尚図1には詳細に示されていないが、操舵制御装置46、転舵角可変制御装置52、電動パワーステアリング制御装置54はそれぞれCPUとROMとRAMと入出力ポート装置とを有し、これらが双方向性のコモンバスにより互いに接続されたマイクロコンピュータ及び駆動回路よりなっていてよい。また操舵角センサ40及び44、トルクセンサ42、ヨーレートセンサ50はそれぞれ車輌の左旋回方向への操舵の場合を正として操舵角θs及びθa、操舵トルクTs、ヨーレートγを検出する。
【0040】
次に図2に示されたフローチャートを参照して図示の実施形態に於いて操舵制御装置46により達成される目標相対回転角度演算及びトルク制御用目標電流演算ルーチンについて説明する。尚図2に示されたフローチャートによる制御は図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0041】
まずステップ10に於いては操舵角θsを示す信号等の読み込みが行われ、ステップ20に於いては操舵角θsに基づき前輪の実舵角δが演算され、Hを車輌のホイールベースとし、Khをスタビリティファクタとして下記の式1に従って車輌の目標ヨーレートγtが演算され、目標ヨーレートγtと検出ヨーレートγとの偏差Δγ(=γt−γ)が演算される。
γt=V・δ/(1+Kh・V2)H ……(1)
【0042】
ステップ30に於いてはヨーレート偏差Δγに基づき図3に示されたグラフに対応するマップより転舵角可変装置30の目標補助転舵量、即ちアッパステアリングシャフト22Aに対するロアステアリングシャフト22Bの目標相対回転角度θrが演算される。
【0043】
ステップ40に於いては当技術分野に於いて公知のFialaモデルに基づく理論式に従って左右の前輪が路面より受ける力に起因するセルフアライニングトルクTsatが演算される。尚セルフアライニングトルクTsatは電動式パワーステアリング装置16のアシストトルクTapsとピニオン34又はロアステアリングシャフト28Bに於いて検出されるトルクTpとの和として演算されてもよく、また例えばタイロッド20L及び20Rに於いて検出される軸力に基づき推定されてもよい。
【0044】
ステップ50に於いては例えば本願出願人の出願にかかる特開2000−108917号公報に記載されている如く、Kp、Kd、Kddをそれぞれ正の定数とし、θsd及びθstdをそれぞれ操舵角θsの微分値及び二階微分値として、操舵角θsに基づくステアリングホイールの目標トルクTsw(操舵角θsに応じて演出したいトルク)が下記の式2に従って演算される。
Tsw=Kpθs+Kdθsd+Kddθstd ……(2)
【0045】
ステップ60に於いてはIを転舵角可変装置30の電動機36等の慣性モーメントとし、Cを転舵角可変装置30等の粘性係数とし、θrd及びθrtdをそれぞれ目標相対回転角度θrの微分値及び二階微分値とし、Ksatを正の係数として、下記の式3に従って自動操舵時のステアリングホイールの目標トルクTtcが演算される。尚下記の式3の第1項及び第2項は転舵角可変装置30による自動操舵を補助し、自動操舵の反力トルクがステアリングホイールに作用しないようにするためのトルクである。
Ttc=Iθrtd+Cθrd+KsatTsat+Tsw ……(3)
【0046】
ステップ70に於ては目標トルクTtcを変数として電動式パワーステアリング装置16の電動機22に対する自動操舵時のトルク制御用目標電流Itcを演算する関数をf(Ttc)として、下記の式4に従って自動操舵時のトルク制御用目標電流Itcが演算される。
Itc=f(Ttc) ……(4)
【0047】
ステップ80に於ては転舵角可変制御装置52へ目標相対回転角度θrを示す指令信号が送信されると共に、電動パワーステアリング制御装置54へ目標相対回転角度θrを示す信号、セルフアライニングトルクTsatを示す信号、自動操舵時のトルク制御用目標電流Itcを示す指令信号が送信される。
【0048】
尚図には示されていないが、転舵角可変制御装置52は操舵制御装置46より目標相対回転角度θrを示す指令信号を受信すると、電動機36を制御することによりロアステアリングシャフト22Bをアッパステアリングシャフト22Aに対し相対的に目標相対回転角度θr回転させ、これにより左右の前輪10FL及び10FRを自動操舵する。
【0049】
次に図4に示されたフローチャートを参照して図示の実施形態に於いて電動パワーステアリング制御装置54により達成される補助転舵力制御ルーチンについて説明する。尚図4に示されたフローチャートによる制御も図には示されていないイグニッションスイッチの閉成により開始され、所定の時間毎に繰返し実行される。
【0050】
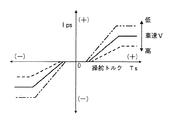
まずステップ110に於いてはトルクセンサ42により検出された操舵トルクTsを示す信号等の読み込みが行われ、ステップ120に於いては操舵トルクTs及び車速Vに基づき図5に示されたグラフに対応するマップより運転者の操舵負担を軽減するための電動式パワーステアリング装置16の電動機22に対する補助転舵用目標電流Ipsが演算される。この場合図5より解る如く、補助転舵用目標電流Ipsの大きさは、操舵トルクTsの大きさが大きいほど大きくなり、同一の操舵トルクTsについて見て車速Vが高いほど小さくなるよう演算される。
【0051】
ステップ130に於いては操舵制御装置46より送信された目標相対回転角度θrを示す信号、セルフアライニングトルクTsatを示す信号、自動操舵時のトルク制御用目標電流Itcを示す指令信号の読み込みが行われる。
【0052】
ステップ140に於いては図6に示されている如くセルフアライニングトルクTsatの絶対値に応じて重みωを演算するためのマップが選択されると共に、選択されたマップより重みωが演算される。この場合図6より解る如く、何れのマップに於いても重みωは目標相対回転角度θrの絶対値が大きくなるにつれて0より漸次1に近づくよう設定される。またセルフアライニングトルクTsatの絶対値が大きいほど、目標相対回転角度θrの大きさが小さい領域に於ける重みωが小さくなるマップが選択される。
【0053】
ステップ150に於いては下記の式5に従って電動式パワーステアリング装置16の電動機22に対する最終目標電流Itが補助転舵用目標電流Ips及び自動操舵時のトルク制御用目標電流Itcの重み和として演算され、ステップ160に於いては最終目標電流Itに基づき電動式パワーステアリング装置16の電動機22が制御される。
It=(1−ω)Ips+ω・Itc ……(5)
【0054】
かくして図示の実施形態によれば、ステップ20及び30に於いて車輌のヨーレートγを目標ヨーレートγtにして車輌を安定的に旋回走行させるべく左右前輪を自動操舵するための目標制御量として転舵角可変装置30の目標補助転舵量、即ちアッパステアリングシャフト22Aに対するロアステアリングシャフト22Bの目標相対回転角度θrが演算され、ステップ40〜60に於いて目標相対回転角度θrに基づく転舵角可変装置30の駆動トルク、セルフアライニングトルクTsat、操舵角θsに基づくステアリングホイールの目標トルクTswに基づき自動操舵時のステアリングホイールの目標トルクTtcが演算され、ステップ70に於て電動式パワーステアリング装置16の電動機22に対する自動操舵時のトルク制御用目標電流Itc、即ち自動操舵時にステアリングホイール14に作用するトルクを自動操舵時の目標トルクに制御するための第二の目標補助転舵力に対応する目標電流が演算される。
【0055】
そしてステップ120に於いて運転者の操舵負担を軽減するための補助転舵トルクに対応する値として電動式パワーステアリング装置16の電動機22に対する補助転舵用目標電流Ips、即ち非自動操舵時にステアリングホイール14に作用するトルクを非自動操舵時の目標トルクに制御するための第一の目標補助転舵力に対応する目標電流が演算され、ステップ140に於いてトルク制御用目標電流Itcの重みωが目標相対回転角度θrの絶対値が大きいほど大きい値になるよう演算され、ステップ150に於いて補助転舵用目標電流Ips及び自動操舵時のトルク制御用目標電流Itcの重みをそれぞれ(1−ω)及びωとして電動式パワーステアリング装置16の電動機22に対する最終目標電流Itがこれらの目標電流Ips及びItcの重み和として演算され、ステップ160に於いて最終目標電流Itに基づき電動式パワーステアリング装置16の電動機22が制御される。
【0056】
この場合自動操舵時のステアリングホイールの目標トルクTtcは、上述の式3に従って、転舵角可変装置30による自動操舵を補助しステアリングホイール14に自動操舵の反力が作用することを防止するトルク(Iθrtd+Cθrd)、左右前輪のセルフアライニングトルクに起因してステアリングホイール14に作用するトルクを相殺するトルク(KsatTsat)、操舵角θsに応じて演出したいトルク(Tsw)の和として演算され、補助転舵用目標電流Ipsは目標トルクTtcに基づき演算される。
【0057】
上記トルク(Iθrtd+Cθrd)は自動操舵の反力トルクがステアリングホイール14に作用することを防止し、トルク(KsatTsat)は自動操舵時に左右前輪の実際の転舵角に応じて発生するセルフアライニングトルクがステアリングホイール14に作用することを防止し、トルク(Tsw)は操舵角θs、即ち運転者のステアリングホイール14の操作に応じて演出したいトルクをステアリングホイール14に与えるので、自動操舵時に自動操舵の反力ステアリングホイール14に作用すること及び左右前輪の実際の転舵角が操舵角θsに対応せず実際のセルフアライニングトルクが操舵角θsに対応するセルフアライニングトルクとは異なることに起因して運転者が違和感を感じることを効果的に防止することができる。
【0058】
特に図示の実施形態によれば、操舵モードが非自動操舵より自動操舵へ変化する際には、目標相対回転角度θrの絶対値の増大につれて補助転舵用目標電流Ipsの重み(1−ω)が1より漸次減少すると共にトルク制御用目標電流Itcの重みωが0より漸次増大し、操舵モードが自動操舵より非自動操舵へ変化する際には、目標相対回転角度θrの絶対値の減少につれてトルク制御用目標電流Itcの重みωが1より漸次減少すると共に補助転舵用目標電流Ipsの重み(1−ω)が0より漸次増大するので、操舵モードが非自動操舵と自動操舵との間に変化する際に電動式パワーステアリング装置16の補助転舵力が急激に変化すること及びこれに起因して運転者が違和感を感じることを確実に且つ効果的に防止することができる。
【0059】
また図示の実施形態によれば、セルフアライニングトルクTsatの絶対値が大きいほど、目標相対回転角度θrの大きさが小さい領域に於ける重みωが小さくなるマップが選択されるので、セルフアライニングトルクTsatの絶対値が大きく操舵輪が受ける路面反力が高いほど操舵モードが非自動操舵と自動操舵との間に変化する際に於ける補助転舵用目標電流Ips及びトルク制御用目標電流Itcの重みの変化が穏やかになり、従って操舵モードが非自動操舵と自動操舵との間に変化する際に最終目標電流Itが急激に変化しステアリングホイール14に作用するトルクが急激に変化することに起因して運転者が違和感を感じることを確実に且つ効果的に防止することができる。
【0060】
また前述の特開平5−777751号公報に記載されている如く、補助転舵力発生手段が補助転舵手段としての転舵角可変装置30に対しステアリングホイール14の側に設けられている場合には、補助転舵力発生手段の補助転舵力により操舵アシストも行おうとすると、補助転舵力は転舵角可変装置30を介して操舵輪へ伝達されなければならず、転舵角可変装置に比較的大きい負荷がかかるため、転舵角可変装置は高強度のものでなければならず、転舵角可変装置として小型の歯車装置を使用することができず、また操舵系を小型化することができない。またこの問題を解消しようとすると、転舵角可変装置30に対しステアリングホイール14の側に設けられる補助転舵力発生手段に加えて転舵角可変装置に対し操舵輪の側に操舵アシスト用の補助転舵力発生手段が設けられなければならない。
【0061】
図示の実施形態によれば、補助転舵力発生手段としての電動式パワーステアリング装置16は補助転舵手段としての転舵角可変装置30に対し操舵輪の側に設けられているので、補助転舵手段に対しステアリングホイールの側に他の補助転舵力発生手段を設ける必要がなく、電動式パワーステアリング装置16を非自動操舵時には操舵アシストトルクを発生するための手段として機能させ、自動操舵時には転舵角可変装置30と共働して操舵輪を自動操舵すると共にステアリングホイールに作用するトルクを目標トルクに制御するための手段として機能させることができる。
【0062】
以上に於いては本発明を特定の実施形態について詳細に説明したが、本発明は上述の実施形態に限定されるものではなく、本発明の範囲内にて他の種々の実施形態が可能であることは当業者にとって明らかであろう。
【0063】
例えば上述の実施形態に於いては、自動操舵時の第二の目標補助転舵力に対応するステアリングホイールの目標トルクTtcは上述の式3に従って演算されるようになっているが、目標補助転舵量及び車輌の走行状態に基づきステアリングホイールに作用するトルクを自動操舵時の目標トルクに制御するための第二の目標補助転舵力に対応する目標電流として演算される限り、好ましくは目標補助転舵量に基づいて操舵輪を補助転舵し自動操舵する際の反力がステアリングホイールに作用することを防止する力と、セルフアライニングトルクを相殺してセルフアライニングトルクがステアリングホイールへ伝達されることを防止する力と、運転者の操舵状況に応じて発生することが望ましい操舵トルクを発生させる力とに基づき演算される第二の目標補助転舵力に対応する目標電流として演算される限り、任意の態様にて演算されてよい。
【0064】
また上述の実施形態に於いては、セルフアライニングトルクTsatの絶対値が大きいほど、目標相対回転角度θrの大きさが小さい領域に於ける重みωが小さくなるマップが選択されることにより、重みωはセルフアライニングトルクTsatの絶対値によっても可変設定されるようになっているが、セルフアライニングトルクTsatの絶対値に応じた重みωの可変設定は省略されてもよい。
【0065】
また上述の実施形態に於いては、重みωは目標相対回転角度θrの絶対値に基づき可変設定され、目標相対回転角度θrの絶対値に基づき自動操舵時であるか非自動操舵時であるかが判定されるようになっているが、重みωは転舵角可変装置30による自動操舵の目標転舵量に相当する値である限り任意の値により可変設定されてもよく、例えば図6のグラフの横軸が上記式3の第1項と第2項との和に置き換えられてもよい。
【0066】
また上述の実施形態に於いては、目標トルクTtcに基づき上述の式4に従って演算されるトルク制御用目標電流Itcが電動パワーステアリング制御装置54へ出力されるようになっているが、目標相対回転角度θrを示す指令信号が転舵角可変制御装置52及び電動パワーステアリング制御装置54へ出力され、電動パワーステアリング制御装置54に於いて上記式3及び4に従ってトルク制御用目標電流Itcが演算されるよう修正されてもよい。
【0067】
また上述の実施形態に於いては、転舵角可変制御装置52は運転者による通常操舵時には転舵角可変装置30の相対回転角度を0に維持するようになっているが、転舵角可変装置30は自動操舵が行われない通常操舵時にはアッパステアリングシャフト22Aの回転角度に対するロアステアリングシャフト22Bの回転角度の比が例えば車速Vが高いほど小さくなるよう、車輌の走行状況に応じてギヤ比可変装置として使用されてもよい。
【0068】
また上述の実施形態に於いては、操舵輪の目標転舵量は車輌の実ヨーレートと車輌の目標ヨーレートとの偏差を低減するための目標転舵量であるが、例えば前述の特開平11−73597号公報に記載されている如く、車輌を走行車線に沿って走行させるための目標転舵量や、例えば特開平10−31799号公報に記載されている如く、レーザレーダ等により車輌前方の障害物が検出される場合には、車輌前方の障害物を回避するための目標転舵量であってよく、更にはこれら以外の任意の目標転舵量であってもよい。
【0069】
また上述の実施形態に於いては、転舵角可変装置30は転舵角可変制御装置52により制御され、電動式パワーステアリング装置16は電動パワーステアリング制御装置54により制御され、転舵角可変制御装置52及び電動パワーステアリング制御装置54は操舵制御装置46により制御されるようになっているが、これらの少なくとも二つの制御装置が一つの制御装置に統合されてもよい。
【図面の簡単な説明】
【図1】転舵角可変装置及び電動式パワーステアリング装置を備えたセミステアバイワイヤ式の車輌に適用された本発明による車輌用自動操舵装置の一つの実施形態を示す概略構成図である。
【図2】実施形態に於ける操舵制御装置により達成される目標相対回転角度演算及びトルク制御用目標電流演算ルーチンを示すフローチャートである。
【図3】ヨーレート偏差Δγと目標相対回転角度θrとの間の関係を示すグラフである。
【図4】実施形態に於ける電動パワーステアリング制御装置により達成される補助転舵力制御ルーチンを示すフローチャートである。
【図5】非自動操舵時に於ける車速V及び操舵トルクTsと補助転舵用目標電流Ipsとの間の関係を示すグラフである。
【図6】目標相対回転角度θrの絶対値及びセルフアライニングトルクTsatの絶対値と重みωとの間の関係を示すグラフである。
【符号の説明】
10FR〜10RL…車輪
16…電動式パワーステアリング装置
28A…アッパステアリングシャフト
28B…ロアステアリングシャフト
30…転舵角可変装置
40、44…操舵角センサ
42…トルクセンサ
46…操舵制御装置
48…車速センサ
50…ヨーレートセンサ
52…転舵角可変制御装置
54…電動パワーステアリング(電動PS)制御装置
Claims (3)
- ステアリングホイールと操舵輪との間の操舵系に設けられ前記ステアリングホイールに対し相対的に前記操舵輪を補助転舵し自動操舵する補助転舵手段と、前記操舵系に設けられ前記操舵輪の転舵を補助する補助転舵力を発生する補助転舵力発生手段と、前記補助転舵手段及び前記補助転舵力発生手段を制御する制御手段とを有するセミステアバイワイヤ式の車輌用自動操舵装置にして、前記制御手段は前記補助転舵手段の目標補助転舵量を演算する目標補助転舵量演算手段と、前記操舵系のトルクを検出する手段と、前記検出されたトルクに基づき前記ステアリングホイールに作用するトルクを非自動操舵時の目標トルクに制御するための第一の目標補助転舵力を演算する第一の目標補助転舵力演算手段と、前記目標補助転舵量及び車輌の走行状態に基づき前記ステアリングホイールに作用するトルクを自動操舵時の目標トルクに制御するための第二の目標補助転舵力を演算する第二の目標補助転舵力演算手段と、前記第一及び第二の目標補助転舵力の重み和として最終目標補助転舵力を演算する最終目標補助転舵力演算手段と、前記目標補助転舵量に基づいて前記補助転舵手段を制御する補助転舵制御手段と、前記最終目標補助転舵力に基づいて前記補助転舵力発生手段を制御する補助転舵力制御手段と、自動操舵時には非自動操舵時に比して前記第一の目標補助転舵力の重みを小さくすると共に前記第二の目標補助転舵力の重みを大きくする重み制御手段とを有することを特徴とする車輌用自動操舵装置。
- 前記重み制御手段は非自動操舵時には前記第二の目標補助転舵力の重みを0に設定し、自動操舵時には前記第一の目標補助転舵力の重みを0に設定し、非自動操舵時と自動操舵時との間の変化時には前記第一及び第二の目標補助転舵力の重みを徐々に変化させることを特徴とする請求項1に記載の車輌用自動操舵装置。
- 前記制御手段は前記操舵輪が路面より受けるセルフアライニングトルクを求める手段を有し、前記重み制御手段はセルフアライニングトルクの大きさが大きいほど前記第一及び第二の目標補助転舵力の重みの変化勾配を小さくすることを特徴とする請求項2に記載の車輌用自動操舵装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002060749A JP3705227B2 (ja) | 2002-03-06 | 2002-03-06 | 車輌用自動操舵装置 |
| US10/356,539 US6782968B2 (en) | 2002-03-06 | 2003-02-03 | Automatic steering apparatus for vehicle and control method of same |
| EP03003682A EP1342642B1 (en) | 2002-03-06 | 2003-02-18 | Automatic steering apparatus for vehicle and control method of same |
| DE60308075T DE60308075T8 (de) | 2002-03-06 | 2003-02-18 | Automatische Lenkeinrichtung für ein Fahrzeug und Steuerverfahren dafür |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002060749A JP3705227B2 (ja) | 2002-03-06 | 2002-03-06 | 車輌用自動操舵装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003261054A JP2003261054A (ja) | 2003-09-16 |
| JP3705227B2 true JP3705227B2 (ja) | 2005-10-12 |
Family
ID=27751142
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002060749A Expired - Fee Related JP3705227B2 (ja) | 2002-03-06 | 2002-03-06 | 車輌用自動操舵装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6782968B2 (ja) |
| EP (1) | EP1342642B1 (ja) |
| JP (1) | JP3705227B2 (ja) |
| DE (1) | DE60308075T8 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220073135A1 (en) * | 2020-09-09 | 2022-03-10 | Hyundai Mobis Co., Ltd. | Steering control system and method for vehicle |
Families Citing this family (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7219761B2 (en) * | 2000-07-21 | 2007-05-22 | Nsk Ltd. | Motor-operated power steering apparatus |
| EP1541445B1 (en) * | 2002-09-19 | 2008-04-02 | NSK Ltd., | Control device for motorized power steering device |
| JP3964771B2 (ja) * | 2002-10-11 | 2007-08-22 | 株式会社豊田中央研究所 | 路面状態推定装置、及び該装置を備えた車両の運動制御装置 |
| JP3908144B2 (ja) * | 2002-10-11 | 2007-04-25 | 株式会社ジェイテクト | ステアリング制御装置 |
| JP4120427B2 (ja) * | 2003-03-06 | 2008-07-16 | トヨタ自動車株式会社 | 車輌用操舵制御装置 |
| DE10312513B4 (de) * | 2003-03-20 | 2008-09-04 | Daimler Ag | System zur Spurhaltelenkunterstützung in einem Fahrzeug |
| US20060124368A1 (en) * | 2003-03-28 | 2006-06-15 | Plishner Paul J | Vehicle with a distributed motor |
| JP2005306124A (ja) * | 2004-04-20 | 2005-11-04 | Hitachi Ltd | 車両制御装置 |
| DE102004045091A1 (de) | 2004-09-17 | 2006-04-13 | Audi Ag | Hydraulische Lenkvorrichtung für ein Kraftfahrzeug |
| US7530422B2 (en) | 2004-09-17 | 2009-05-12 | Delphi Technologies, Inc. | Force and position control for active front steering |
| JP4441909B2 (ja) * | 2004-10-25 | 2010-03-31 | 株式会社デンソー | 車両制御装置 |
| JP2006130940A (ja) * | 2004-11-02 | 2006-05-25 | Toyoda Mach Works Ltd | ステアバイワイヤシステム |
| US8762004B2 (en) * | 2006-08-03 | 2014-06-24 | Amir Khajepour | Vehicle dynamic control using pulsed active steering strategy |
| JP4916820B2 (ja) * | 2006-08-29 | 2012-04-18 | 富士重工業株式会社 | 車両の操舵制御装置 |
| JP5141025B2 (ja) * | 2007-02-01 | 2013-02-13 | トヨタ自動車株式会社 | 車両用操舵システム |
| JP4495739B2 (ja) * | 2007-02-16 | 2010-07-07 | 本田技研工業株式会社 | 操舵システム |
| JP4932558B2 (ja) * | 2007-03-26 | 2012-05-16 | 株式会社ショーワ | 電動パワーステアリング装置 |
| JP4425297B2 (ja) * | 2007-07-25 | 2010-03-03 | 株式会社デンソー | 操舵補助装置 |
| JP4623063B2 (ja) * | 2007-08-02 | 2011-02-02 | 株式会社デンソー | 操舵補助装置 |
| MX2008014783A (es) | 2008-02-05 | 2009-08-27 | Krueger Int Inc | Armazon para silla con soporte hueco ergonomico integral. |
| DE102010029222A1 (de) * | 2010-05-21 | 2011-11-24 | Bayerische Motoren Werke Aktiengesellschaft | Spurhalteassistenzsystem zur Querführungsunterstützung an einem nicht spurgebundenen Kraftfahrzeug |
| JP5224419B2 (ja) * | 2011-02-09 | 2013-07-03 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| US8954235B2 (en) * | 2011-05-05 | 2015-02-10 | GM Global Technology Operations LLC | System and method for enhanced steering override detection during automated lane centering |
| JP5533903B2 (ja) * | 2012-01-27 | 2014-06-25 | トヨタ自動車株式会社 | 車両制御装置 |
| JP5826680B2 (ja) * | 2012-03-09 | 2015-12-02 | Ntn株式会社 | ステアバイワイヤ式操舵機構の制御装置 |
| KR101349464B1 (ko) | 2012-07-05 | 2014-01-09 | 현대자동차주식회사 | 상용 하이브리드 전동 조향장치 및 이의 제어를 통한 성능 및 연비 개선방법 |
| JP6260815B2 (ja) * | 2014-02-12 | 2018-01-17 | 株式会社ジェイテクト | 操舵支援装置 |
| DE102015006491A1 (de) * | 2015-05-22 | 2016-11-24 | Thyssenkrupp Ag | Verfahren zur Regelung eines elektrischen Stellantriebs |
| WO2016088704A1 (ja) * | 2014-12-02 | 2016-06-09 | 日本精工株式会社 | 電動パワーステアリング装置 |
| DE102014226781A1 (de) * | 2014-12-22 | 2016-06-23 | Volkswagen Aktiengesellschaft | Verfahren und Vorrichtung zur Bestimmung eines resultierenden Sollwerts zur Regelung einer Lenkeinrichtung sowie Fahrzeug |
| DE102015202433B4 (de) * | 2015-02-11 | 2024-07-18 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Überwachen einer Lenkaktion eines Fahrers eines Fahrzeugs |
| JP2016203668A (ja) * | 2015-04-15 | 2016-12-08 | 日本精工株式会社 | ステアリング装置 |
| EP3147180B1 (fr) * | 2015-09-25 | 2020-02-19 | Siemens Mobility S.A.S. | Système et méthode d'aide à la conduite pour véhicule |
| CN106945719A (zh) * | 2017-01-16 | 2017-07-14 | 南京航空航天大学 | 一种复合转向系统及其模式切换方法 |
| DE102017213332A1 (de) * | 2017-08-02 | 2019-02-07 | Audi Ag | Verfahren zum Lenken eines Fahrzeugs |
| DE112020005295T5 (de) * | 2020-01-21 | 2022-10-27 | Hitachi Astemo, Ltd. | Lenksteuervorrichtung und lenkvorrichtung |
| JP7303153B2 (ja) * | 2020-05-18 | 2023-07-04 | トヨタ自動車株式会社 | 車両用運転支援装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3922527A1 (de) * | 1989-07-08 | 1991-01-17 | Daimler Benz Ag | Verfahren zur einstellung einer unterstuetzenden kraft in einer servolenkung in abhaengigkeit von mehreren fahrbedingungsparametern |
| JPH0577751A (ja) | 1991-09-17 | 1993-03-30 | Fuji Heavy Ind Ltd | 車両用ステアリング制御装置 |
| JP3034430B2 (ja) * | 1994-07-27 | 2000-04-17 | 本田技研工業株式会社 | 車両用操舵装置の操舵反力制御装置 |
| JP3574235B2 (ja) | 1995-08-31 | 2004-10-06 | 本田技研工業株式会社 | 車両の操舵力補正装置 |
| US6053270A (en) | 1995-11-02 | 2000-04-25 | Honda Giken Kogyo Kabushiki Kaisha | Steering angle correcting system in vehicle |
| JPH1031799A (ja) | 1996-07-15 | 1998-02-03 | Toyota Motor Corp | 自動走行制御装置 |
| JP4026887B2 (ja) * | 1997-07-24 | 2007-12-26 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3235527B2 (ja) | 1997-08-28 | 2001-12-04 | 三菱自動車工業株式会社 | 車線逸脱防止装置 |
| JP3314866B2 (ja) | 1997-09-13 | 2002-08-19 | 本田技研工業株式会社 | 車両用操舵装置 |
| US6240350B1 (en) * | 1998-07-24 | 2001-05-29 | Nsk Ltd. | Control apparatus for electric power steering system |
| JP4119058B2 (ja) * | 1999-09-07 | 2008-07-16 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| JP3663330B2 (ja) * | 2000-02-29 | 2005-06-22 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| JP2001260925A (ja) * | 2000-03-22 | 2001-09-26 | Toyoda Mach Works Ltd | 電動式パワーステアリング装置 |
| US6481526B1 (en) | 2000-11-13 | 2002-11-19 | Delphi Technologies, Inc. | Steer-by-wire handwheel actuator incorporating mechanism for variable end-of-travel |
| US6535806B2 (en) | 2001-01-30 | 2003-03-18 | Delphi Technologies, Inc. | Tactile feedback control for steer-by-wire systems |
| US6845309B2 (en) * | 2002-01-30 | 2005-01-18 | Visteon Global Technologies, Inc. | Electric power assist torque check |
| JP3850735B2 (ja) * | 2002-02-04 | 2006-11-29 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
-
2002
- 2002-03-06 JP JP2002060749A patent/JP3705227B2/ja not_active Expired - Fee Related
-
2003
- 2003-02-03 US US10/356,539 patent/US6782968B2/en not_active Expired - Lifetime
- 2003-02-18 DE DE60308075T patent/DE60308075T8/de active Active
- 2003-02-18 EP EP03003682A patent/EP1342642B1/en not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220073135A1 (en) * | 2020-09-09 | 2022-03-10 | Hyundai Mobis Co., Ltd. | Steering control system and method for vehicle |
| US11814122B2 (en) * | 2020-09-09 | 2023-11-14 | Hyundai Mobis Co., Ltd. | Steering control system and method for vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| DE60308075D1 (de) | 2006-10-19 |
| EP1342642A2 (en) | 2003-09-10 |
| US20030168275A1 (en) | 2003-09-11 |
| JP2003261054A (ja) | 2003-09-16 |
| US6782968B2 (en) | 2004-08-31 |
| EP1342642A3 (en) | 2004-04-21 |
| DE60308075T8 (de) | 2007-09-06 |
| DE60308075T2 (de) | 2007-04-05 |
| EP1342642B1 (en) | 2006-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3705227B2 (ja) | 車輌用自動操舵装置 | |
| EP1513718B1 (en) | Vehicular steering control apparatus | |
| JP4254777B2 (ja) | 車輌用操舵制御装置 | |
| EP1935757B1 (en) | Vehicle steering apparatus | |
| JP3738673B2 (ja) | 車輌用自動操舵装置 | |
| JP4811188B2 (ja) | 車両の操舵制御装置 | |
| JP2003261053A (ja) | 車輌用自動操舵装置 | |
| JP3862000B2 (ja) | 車輌用自動操舵装置 | |
| JP3843804B2 (ja) | 車輌用自動操舵装置 | |
| JPH0443165A (ja) | 車両のパワーステアリング装置 | |
| JP4349092B2 (ja) | 車両のパワーステアリング制御装置 | |
| JP2016107810A (ja) | パワーステアリング制御装置 | |
| JP4715472B2 (ja) | 車輌の操舵制御装置 | |
| JP4211056B2 (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2005255098A (ja) | 車輌の走行制御装置 | |
| JP4631649B2 (ja) | 車輌用操舵制御装置 | |
| JP4211054B2 (ja) | 自動車の操舵フィーリング設定装置 | |
| WO2021205575A1 (ja) | 制御装置、ステアリング装置 | |
| JP4211052B2 (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2005059688A (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2021151806A (ja) | 操舵制御装置、ステアリング装置 | |
| JP2005059692A (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2005059694A (ja) | 自動車の操舵フィーリング設定装置 | |
| JP2005059689A (ja) | 自動車の操舵フィーリング設定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050705 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050718 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 3705227 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080805 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090805 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100805 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110805 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110805 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120805 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130805 Year of fee payment: 8 |
|
| LAPS | Cancellation because of no payment of annual fees |