JP2025008146A - Home delivery management system, control device, flying object, position designation unit, terminal, user device - Google Patents
Home delivery management system, control device, flying object, position designation unit, terminal, user device Download PDFInfo
- Publication number
- JP2025008146A JP2025008146A JP2023110070A JP2023110070A JP2025008146A JP 2025008146 A JP2025008146 A JP 2025008146A JP 2023110070 A JP2023110070 A JP 2023110070A JP 2023110070 A JP2023110070 A JP 2023110070A JP 2025008146 A JP2025008146 A JP 2025008146A
- Authority
- JP
- Japan
- Prior art keywords
- package
- location
- delivery
- management system
- aircraft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/083—Shipping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/60—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons
- B64U2101/64—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons for parcel delivery or retrieval
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Economics (AREA)
- Quality & Reliability (AREA)
- Tourism & Hospitality (AREA)
- Human Resources & Organizations (AREA)
- Marketing (AREA)
- Operations Research (AREA)
- Development Economics (AREA)
- Strategic Management (AREA)
- Entrepreneurship & Innovation (AREA)
- Physics & Mathematics (AREA)
- General Business, Economics & Management (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
【課題】
ドローンを用いた宅配配送における配達側と受取側の負担の軽減を図ること。
【解決手段】
この宅配管理システムは、荷物を配達する飛行体と、飛行体に行き先を指示する制御装置と、着陸位置を指示する位置指定部と、位置指定部の識別子と配達する荷物を紐づける端末と、を備える。そして、この宅配管理システムは、配達先の荷物に紐づけられた位置指定部の場所に、配達先から指示された時間あるいは時刻に基づき飛行体を用いて前記荷物を配達する。
【選択図】 図2
【assignment】
To reduce the burden on both the deliverer and recipient when using drones for home delivery.
SOLUTION
This home delivery management system includes an aircraft that delivers packages, a control device that instructs the aircraft of a destination, a location designation unit that instructs a landing location, and a terminal that links an identifier of the location designation unit to the package to be delivered.The home delivery management system delivers the package to the location of the location designation unit linked to the package of the delivery destination using the aircraft based on the time or time designated by the delivery destination.
[Selected figure] Figure 2
Description
本発明は、宅配管理システム、制御装置、飛行体、位置指定部、端末、および、ユーザ装置に関する。 The present invention relates to a home delivery management system, a control device, an aircraft, a position designation unit, a terminal, and a user device.
例えばコロナ禍にともなう社会動態の変化に伴い、通信販売などの需要が増加し、それにより宅配業が扱う荷物の量は増加している。一方で、物流業界の人員の高齢化などにより、今後配送に関する人員が不足し、社会システムに影響が出ることが考えられる。このような宅配業務の人員不足に対し、ロボットなどによる無人配送への期待が高まっている。特にドローンのような飛行体を用いた宅配は、交通事情に左右されず短時間で効率よく配送することが可能なため積極的に実証実験が行われている。 For example, with the changes in social dynamics brought about by the COVID-19 pandemic, demand for mail order shopping and other services has increased, resulting in an increase in the volume of packages handled by the delivery industry. On the other hand, due to factors such as the aging of the workforce in the logistics industry, there will likely be a shortage of delivery personnel in the future, which will have an impact on social systems. In response to this shortage of delivery personnel, there are growing hopes for unmanned delivery using robots and other methods. In particular, delivery using flying objects such as drones is actively being tested, as it allows for efficient delivery in a short amount of time regardless of traffic conditions.
しかし、現在の宅配業務を全てドローンによる配送に切り替えるためには非常に多数の機体を同時に運航する必要があり、それは安全な飛行を実現する管制面だけでなく、ドローンを多数揃えるという調達面からも実現が容易ではない。また、ドローンの着陸地点についてはあらかじめ決められたドローンポートを用いる技術が多く、ドローン配送の移動の自由度を十分に生かせていない。特許文献1では端末からの短距離信号を用いてドローンの配送先を誘導する技術が示されているが、ドローンの着陸可否を判断できないため空中からの荷物吊り下げでの受け渡ししかできず、重量のある荷物には対応できない。
However, in order to switch all current parcel delivery operations to drone delivery, a large number of aircraft would need to be operated simultaneously, which is not easy to achieve not only from the perspective of controlling safe flights but also from the perspective of procuring a large number of drones. Furthermore, many technologies use predetermined drone ports as landing points for drones, which does not fully utilize the freedom of movement that drone delivery offers.
また宅配業務においては、受取人不在に伴う再配達荷物の増加も問題となっている。配達側からみると同じ荷物を何度も配達することは物理的な負担だけでなく配達員の心理的な負担も大きい。また荷物の受け取り側から見ると、再配達を依頼した時間には必ず在宅している必要があり、また時間指定の幅も大きいため長時間拘束されるという問題があった。 In addition, in the home delivery business, an increase in redelivery packages due to recipients being absent has become an issue. From the delivery side, delivering the same package multiple times is not only a physical burden but also a heavy psychological burden for the delivery person. From the perspective of the package recipient, there is also the problem that they must be at home at the time of the redelivery request, and there is a wide range of time slots to specify, which means they are tied up for long periods of time.
ドローンを用いた宅配配送では、ドローンの着陸位置を受取人が自由に設定できないため、不自由が生じる。また、受取人が不在の場合の荷物の再配達については、例えば、配達側では同じ荷物を何回も運ぶ必要があり物理的に心理的の負担が大きく、受け取り側は受取位置や時間を自由に設定できないため負担が大きいという課題があった。 When using drones for home delivery, recipients are unable to freely set the drone's landing location, which causes inconvenience. In addition, when redelivering a package when the recipient is absent, for example, the delivery party has to carry the same package multiple times, which places a heavy physical and psychological burden, and the recipient is also burdened by not being able to freely set the pickup location or time, which poses an issue.
本発明の第1の態様によれば、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体と、飛行体に行き先を指示する制御装置と、着陸位置を指示する位置指定部と、位置指定部の識別子と配達する荷物を紐づける端末と、を備える。そして、宅配管理システムは、配達先の荷物に紐づけられた位置指定部の場所に、配達先から指示された時間あるいは時刻に基づき飛行体を用いて荷物を配達する。 According to a first aspect of the present invention, the following home delivery management system is provided. This home delivery management system includes an aircraft that delivers packages, a control device that instructs the aircraft of a destination, a position designation unit that instructs a landing position, and a terminal that links an identifier of the position designation unit to the package to be delivered. The home delivery management system then uses the aircraft to deliver the package to the location of the position designation unit linked to the package at the delivery destination based on the time or time specified by the delivery destination.
本発明の第2の態様によれば、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体と、飛行体に行き先を指示する制御装置と、配送の指示に用いるアプリケーションを格納するユーザ装置と、を備える。ユーザ装置は、アプリケーションを用いて飛行体の着陸可否を判断し、着陸可能な配達先の場所と配達時間あるいは配達時刻を制御装置に出力する。そして、宅配管理システムは、アプリケーションにより伝えられた場所に、配達先から指示された配達時間あるいは配達時刻に基づき飛行体を用いて荷物を配達する。 According to a second aspect of the present invention, the following delivery management system is provided. This delivery management system includes an aircraft that delivers packages, a control device that instructs the aircraft of the destination, and a user device that stores an application used to instruct the delivery. The user device uses the application to determine whether the aircraft can land, and outputs the location of the delivery destination where it can land and the delivery time or delivery time to the control device. The delivery management system then uses the aircraft to deliver the package to the location communicated by the application, based on the delivery time or delivery time instructed by the delivery destination.
本発明の第3の態様によれば、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体と、飛行体に行き先を指示する制御装置と、荷物の受け取り場所に配置される位置指定部と、配送の指示に用いるユーザ装置と、を備える。ユーザ装置は、複数の荷物の受け取り場所を荷物の受取人に提示し、荷物の受取人によって選択された受け取り場所、および、配達時間あるいは配達時刻を制御装置に出力する。制御装置は、受け取り場所に紐づいた位置指定部を配達先に設定する。飛行体は、指示された配達時間あるいは配達時刻に、設定された位置指定部の場所に荷物を配達する。 According to a third aspect of the present invention, the following home delivery management system is provided. This home delivery management system includes an aircraft that delivers packages, a control device that instructs the aircraft of the destination, a location designation unit that is placed at the package receiving location, and a user device used to instruct the delivery. The user device presents a plurality of package receiving locations to the package recipient, and outputs the receiving location selected by the package recipient and the delivery time or delivery time to the control device. The control device sets the location designation unit linked to the receiving location as the delivery destination. The aircraft delivers the package to the location set in the location designation unit at the instructed delivery time or delivery time.
本発明によれば、配達側は、荷物の再配達はドローンに任せられるので、基本的に1つの荷物は1回だけ配達すればよくなり、負担を大きく軽減できる。受け取り側は、受取時間(あるいは時刻)を設定でき、荷物を受け取る場所をピンポイントで設定できるため、利便性が向上する。なお、上記した以外の課題、構成および効果は、以下の発明を実施するための形態の説明により明らかにされる。 According to the present invention, the delivery party can leave the redelivery of the package to the drone, so basically each package only needs to be delivered once, greatly reducing the burden on the delivery party. The recipient can set the pickup time (or time of day) and pinpoint the location to receive the package, improving convenience. Problems, configurations, and effects other than those described above will be made clear in the description of the embodiment of the invention below.
以下、図面を参照して本発明の実施形態を説明する。実施形態は、本発明を説明するための例示であって、説明の明確化のため、適宜、省略および簡略化がなされている。本発明は、他の種々の形態でも実施することが可能である。特に限定しない限り、各構成要素は単数でも複数でも構わない。
図面において示す各構成要素の位置、大きさ、形状、範囲などは、発明の理解を容易にするため、実際の位置、大きさ、形状、範囲などを表していない場合がある。このため、本発明は、必ずしも、図面に開示された位置、大きさ、形状、範囲などに限定されない。
各種情報の例として、「テーブル」、「リスト」、「キュー」等の表現にて説明することがあるが、各種情報はこれら以外のデータ構造で表現されてもよい。例えば、「XXテーブル」、「XXリスト」、「XXキュー」等の各種情報は、「XX情報」としてもよい。識別情報について説明する際に、「識別情報」、「識別子」、「名」、「ID」、「番号」等の表現を用いるが、これらについてはお互いに置換が可能である。
同一あるいは同様の機能を有する構成要素が複数ある場合には、同一の符号に異なる添字を付して説明する場合がある。また、これらの複数の構成要素を区別する必要がない場合には、添字を省略して説明する場合がある。
実施形態において、プログラムを実行して行う処理について説明する場合がある。ここで、計算機は、プロセッサ(例えばCPU、GPU)によりプログラムを実行し、記憶資源(例えばメモリ)やインターフェースデバイス(例えば通信ポート)等を用いながら、プログラムで定められた処理を行う。そのため、プログラムを実行して行う処理の主体を、プロセッサとしてもよい。同様に、プログラムを実行して行う処理の主体が、プロセッサを有するコントローラ、装置、システム、計算機、ノードであってもよい。プログラムを実行して行う処理の主体は、演算部であれば良く、特定の処理を行う専用回路を含んでいてもよい。ここで、専用回路とは、例えばFPGA(Field Programmable Gate Array)やASIC(Application Specific Integrated Circuit)、CPLD(Complex Programmable Logic Device)等である。
プログラムは、プログラムソースから計算機にインストールされてもよい。プログラムソースは、例えば、プログラム配布サーバまたは計算機が読み取り可能な記憶メディアであってもよい。プログラムソースがプログラム配布サーバの場合、プログラム配布サーバはプロセッサと配布対象のプログラムを記憶する記憶資源を含み、プログラム配布サーバのプロセッサが配布対象のプログラムを他の計算機に配布してもよい。また、実施例において、2以上のプログラムが1つのプログラムとして実現されてもよいし、1つのプログラムが2以上のプログラムとして実現されてもよい。
Hereinafter, an embodiment of the present invention will be described with reference to the drawings. The embodiment is an example for explaining the present invention, and appropriate omissions and simplifications are made for clarity of explanation. The present invention can be implemented in various other forms. Unless otherwise specified, each component may be singular or plural.
In order to facilitate understanding of the invention, the position, size, shape, range, etc. of each component shown in the drawings may not represent the actual position, size, shape, range, etc. Therefore, the present invention is not necessarily limited to the position, size, shape, range, etc. disclosed in the drawings.
As examples of various information, expressions such as "table", "list", and "queue" may be used, but the various information may be expressed in other data structures. For example, various information such as "XX table", "XX list", and "XX queue" may be expressed as "XX information". When explaining identification information, expressions such as "identification information", "identifier", "name", "ID", and "number" are used, but these are interchangeable.
When there are multiple components having the same or similar functions, they may be described by using the same reference numerals with different subscripts, or when there is no need to distinguish between these multiple components, the subscripts may be omitted.
In the embodiment, the processing performed by executing a program may be described. Here, the computer executes the program by a processor (e.g., CPU, GPU), and performs the processing defined by the program while using a storage resource (e.g., memory) and an interface device (e.g., a communication port). Therefore, the subject of the processing performed by executing the program may be the processor. Similarly, the subject of the processing performed by executing the program may be a controller, device, system, computer, or node having a processor. The subject of the processing performed by executing the program may be a calculation unit, and may include a dedicated circuit that performs a specific processing. Here, the dedicated circuit is, for example, an FPGA (Field Programmable Gate Array), an ASIC (Application Specific Integrated Circuit), or a CPLD (Complex Programmable Logic Device).
The program may be installed on the computer from a program source. The program source may be, for example, a program distribution server or a computer-readable storage medium. When the program source is a program distribution server, the program distribution server may include a processor and a storage resource for storing the program to be distributed, and the processor of the program distribution server may distribute the program to be distributed to other computers. In addition, in the embodiments, two or more programs may be realized as one program, and one program may be realized as two or more programs.
<第1実施形態>
図1-図11を参照しながら、第1実施形態について説明する。図1は、システム構成の一例を示す。図1に示すように、宅配管理システムは、ドローンによる再配達を指示する制御装置1と、受取人に荷物を配達するドローン3と、位置指定部の一例であり、ドローン着陸位置を指定する位置指定装置4と、配達員が持ち荷物と位置指定装置とを紐づける機能を持つ端末5と、受取人が再配達方法を指示するアプリケーション6(アプリ6と呼ぶことがある)を格納するユーザ装置と、を備える。なお、この例では、制御装置1は、再配達センタ2に設置されている。
First Embodiment
The first embodiment will be described with reference to Figs. 1 to 11. Fig. 1 shows an example of a system configuration. As shown in Fig. 1, the home delivery management system includes a
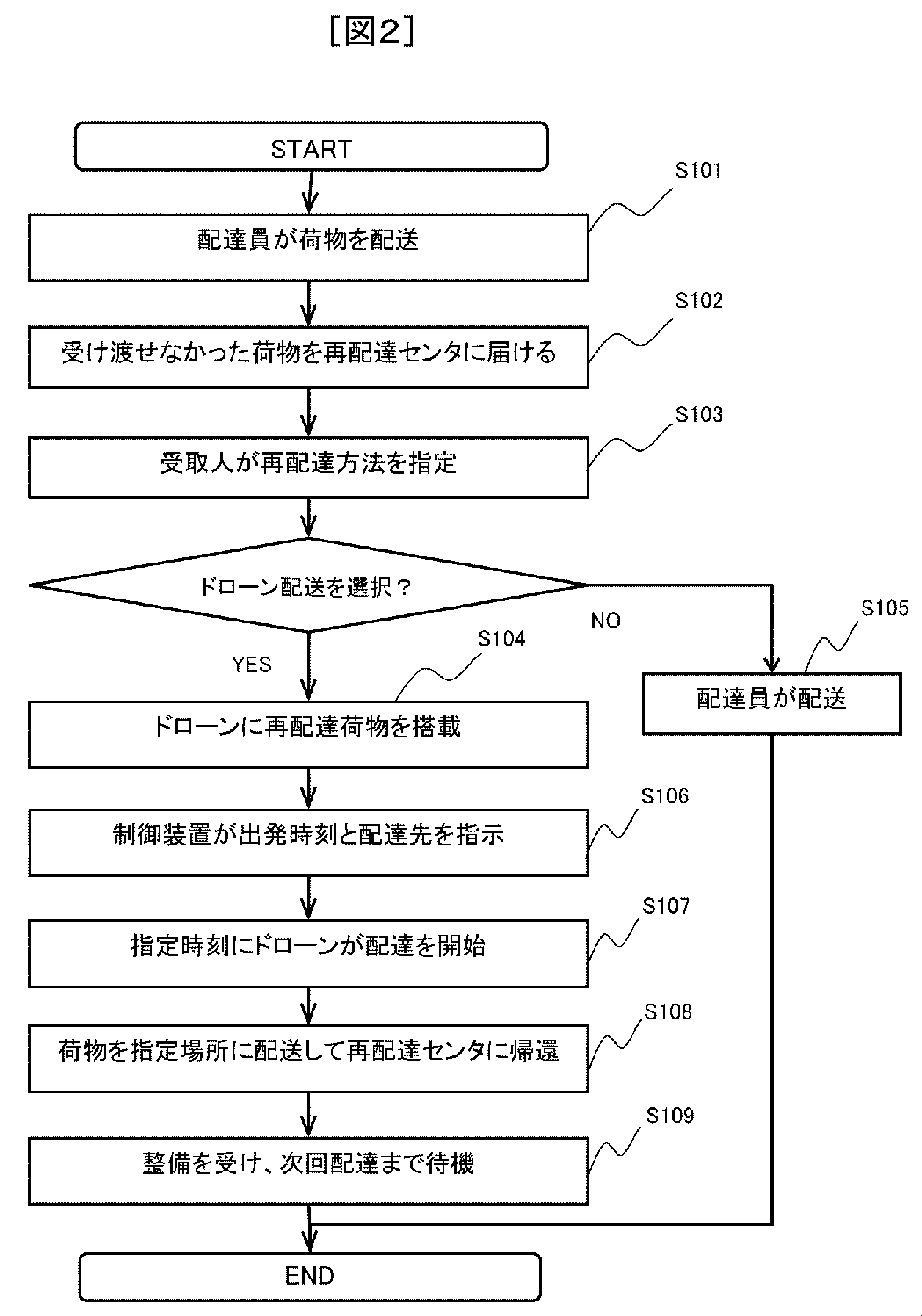
図2を参照しながら、荷物配達の流れの一例を説明する。配達員は、担当エリアの荷物配達を行い(S101)、その際に顧客が受け取れなかった再配達荷物を再配達センタ2に届ける(S102)。受取人は、荷物の再配達依頼をアプリ6などにより行う際、ドローン3による配達か人による配達かを指定する(S103)。人手での配達を指定された場合、再度配達員が配送する(S105)。ドローン3による配送を指定された場合、再配達センタ2では再配達荷物が配送用のドローン3に積み込まれ(S104)、ドローン3が離発着可能なポートに設置される。制御装置1は、顧客からの指示を基に各ドローン3に配達先と出発時刻を指定する(S106)。ドローン3は指定に基づいて出発し(S107)、顧客に荷物を渡した後、再び再配達センタ2に帰還する(S108)。帰還したドローン3は充電などの整備を受けた後、次の配達指示を受けるまで再配達センタ2で待機する(S109)。
An example of the flow of parcel delivery will be described with reference to FIG. 2. A delivery person delivers parcels in his/her assigned area (S101), and delivers parcels that the customer was unable to receive at that time to the redelivery center 2 (S102). When the recipient requests redelivery of the parcel using the
図3を参照しながら、制御装置の機能構成の一例を説明する。制御装置1は、一例として、顧客アプリやドローンと通信を行う通信機能11、ドローンに充電などの整備を行う整備機能12、荷物の大きさ、届け先の状況などに応じて配達するドローンを選定するドローン選定機能13、ドローンの移動時間と配達指定時間に基づいて移動経路や発進時刻を策定するスケジュール策定機能14、荷物の配達先を指示する目的地指示機能15、ドローンの発進指示や運行状況を随時管理する運行管理機能16、配達が完了し再配達センタに帰還したドローンを回収することで、当該ドローンを回収済みとするドローン回収機能17、及び、荷物とドローンの状況を管理する荷物管理DB18を含む。
An example of the functional configuration of the control device will be described with reference to FIG. 3. The
制御装置1は、これらの機能(11~17)を複数のモジュールの組み合わせで実現しても良い。あるいは一部の機能は外部サービスを用いて実現しても良い。例えば運行管理機能16はドローン用の運行管理オペレータが提供するサービスを用いて実現しても良い。
The
図4を参照しながら、荷物管理DBの内容例を説明する。荷物管理DB18は、通常の宅配業務に必要な荷物情報、配送情報に加え、顧客が選んだ配送方法及びそれに応じて割り当てた配送手段のIDを記録する。またドローン配送の場合、着陸位置を指定する位置指定装置のIDも記録する。
An example of the contents of the parcel management DB will be described with reference to Figure 4. In addition to the parcel information and delivery information required for normal home delivery operations, the
図5を参照しながら、荷物の受取人の再配達時の手順の一例を説明する。受取人が不在の際に荷物が配送された場合(S201)、配達人は不在通知と位置指定装置4を受取人に届ける。位置指定装置4は、不在通知と同様に郵便受けや新聞受けに入れたり、ドアの前に置いたりする。もし盗難などにより受取人が位置指定装置4を受け取れなかった場合、その旨がアプリ6などで再配達センタ2に通知され、受取人は荷物もしくは位置指定装置4の再配達などの措置を受ける。
With reference to Figure 5, an example of the procedure for redelivery to a recipient of a package will be described. If a package is delivered when the recipient is absent (S201), the delivery person will deliver an absence notice and a
受取人は、位置指定装置4と不在通知を受け取ると(S202)、アプリ6から再配達方法、配送時間などを指定する(S203)。アプリ6は顧客が持つユーザ装置(スマートフォンやPCなど)で動作し、受取人の本人証明ともなる。
When the recipient receives the
受取人は、荷物受け取りに際し、ドローン3が着陸できる位置に位置指定装置4を設置する(S205)。ドローン3は位置指定装置4が指定した位置に着陸し、受取人は荷物を受け取る(S206)。荷物受け取り後、受取人はドローン3に位置指定装置4を搭載し(S207)、発進を指示する。発進指示の方法としてはドローン上のボタンを押す方法や、アプリ6で指示する方法、位置指定装置4を積み込んだのち一定時間後に自動的に発進させる方法などがある。ドローン3は位置指定装置4を回収して再配達センタ2に帰還する(S208)。
When receiving the package, the recipient sets up the
なお、もし受取人が手渡しによる再配達を希望した場合、受取人は配達員による再配達時に位置指定装置4を返却する(S204)。
If the recipient requests redelivery by hand, the recipient returns the
図6を参照しながら、再配達を行うドローンの機能構成の一例を説明する。再配達を行うドローン3は、配達する荷物を搭載する荷物搭載機能31、搭載した荷物を受取人に渡す荷物受け渡し機能32、制御装置1に指定された場所に荷物を配達する自動配達機能33、配達後に再配達センタ2に帰還する自動帰還機能34、再配達センタ2や運行管理を行う機関と通信を行う通信機能35、位置指定装置4の指示する着陸場所を選定して着陸する着陸場所選定機能36を備える。
An example of the functional configuration of a drone performing redelivery will be described with reference to FIG. 6. The
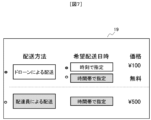
受取人は追加料金を支払うことにより、配送方法や配送時間指定方法を選択することができる。次に、図7を参照しながら、この選択方法の一例について説明する。図7は、顧客が持つアプリケーションにおける再配達方法選択画面19の例を示す。
By paying an additional fee, the recipient can select a delivery method and a delivery time designation method. Next, an example of this selection method will be described with reference to Figure 7. Figure 7 shows an example of a redelivery
例えばドローン3での配送に不安を感じる場合などでは、顧客は配達員による配達を選択できる。ただし、この場合、人件費がかかるため、追加料金が発生する。また、配送時間(配達時間)の指定について、通常、10:00から12:00のように時間帯での指定となるが、ドローン配送ではピンポイントに時刻(配達時刻)を指定することもできる。しかし、この場合、ドローン3の発進スケジュールを優先的に設定する必要があるため、追加料金が発生する。このようにアプリ6の画面上で受取人に選択可能なオプションとそれにより発生する費用を明示し、受取人が柔軟に荷物を受け取ることを可能にする。
For example, if a customer feels uneasy about delivery by
図8-図9を参照しながら、位置指定装置について説明する。本実施形態におけるドローンの着陸位置を決める位置指定装置4の一例を図8に、その機能構成図を図9に示す。
The position designation device will be described with reference to Figures 8 and 9. Figure 8 shows an example of the
本実施形態では、位置指定装置4は、一例として、形状センサからなる着陸地点確認機能41、光により着陸位置を受取人に示す着陸位置表示機能42、上空からドローン3が侵入可能なことを確認する上空確認機能43、ドローン3を着陸位置に誘導するビーコン発信機能44を備える。
In this embodiment, the
位置指定装置4は、受取人により設置されたとき、受取人にその設置場所での着陸地点を光などで示すとともに、その着陸地点にドローン3が着陸できるかどうかを形状センサにより判断する。位置指定装置4は、着陸が可能な場合はそのことを受取人に示し、ドローン3が接近してきたときにビーコンによりドローン3を着陸地点に誘導する。着陸が不可能だと判断した場合、そのことを受取人に示し、別の場所に設置することを促す。また、着陸地点上空からドローン3が侵入可能かどうかも上空確認機能43で調べ、同様に可否を受取人に示す。上空確認の方法の例としては、カメラにより上空に障害物がないか確認し、あわせてGPS電波の受信状況により屋外であることを確認する方法などがある。
When the
図10を参照しながら、配達員が持つ端末の一例を説明する。図10は、配達員が持つ端末の一例の機能構成図を示す。端末5は、荷物のIDを認識するID読み取り機能51、位置指定装置4のIDを認識する位置指定装置認識機能52、荷物と位置指定装置4を紐づける紐づけ機能53、紐づけ結果を再配達センタ2の制御装置1に通知する通信機能54を備える。
An example of a terminal held by a delivery person will be described with reference to FIG. 10. FIG. 10 shows a functional configuration diagram of an example of a terminal held by a delivery person. The
配達員は受取人が不在で荷物の再配達が必要な場合、位置指定装置4を受取人に届ける。この際、配達員は、配達する荷物のIDと受取人に届けた位置指定装置4のIDを端末5でそれぞれ読み取り、この位置指定装置4のところに配達する荷物のIDを明確化する処理が行われる。そして、端末5は、再配達センタ2の制御装置1にその紐づけ結果を通知する。
When the recipient is absent and redelivery of the package is necessary, the delivery person delivers the
制御装置1はこの紐づけ結果を荷物管理DB18に記載する。これにより再配達センタ2でドローン3による荷物の再配達を指示する際に、ドローン3がどの位置指定装置4のもとに荷物を届ければいいかを設定することができる。
The
次に、図11を参照しながら、本実施形態における宅配管理システムの具体的な構成の一例を説明する。制御装置1は、適宜の計算機として構成され、例えば、プロセッサ101と、記憶装置102と、通信装置103と、を備える。プロセッサ101は、所定の処理を実行する主体であり、適宜の半導体デバイス(例えば、CPU)を用いて構成される。記憶装置102は、所定の処理の実行に用いるプログラム等のデータを格納し、例えば、主記憶装置および補助記憶装置を用いて構成される。通信装置103は、通信に用いる構成であり、制御装置1は、通信装置103を介して、データの入出力が可能である。
Next, with reference to FIG. 11, an example of a specific configuration of the home delivery management system in this embodiment will be described. The
制御装置1の各機能(11~17)は、一例として、上記した各種の構成を適宜に用いて実現することができる。なお、一部の機能は外部サービスを用いて実現しても良い。例えば運行管理機能16はドローン用の運行管理オペレータが提供するサービスを用いて実現しても良い。また、荷物管理DB18は、補助記憶装置に構築されてもよい。
The functions (11 to 17) of the
ドローン3は、一例として、プロセッサ301と、記憶装置302と、通信装置303と、飛行装置304と、センサ装置305と、バッテリ306と、ビーコン受信装置307と、を備える。プロセッサ301は、所定の処理を実行する主体であり、適宜の半導体デバイス(例えば、CPU)を用いて構成される。記憶装置302は、所定の処理の実行に用いるプログラム等のデータを格納し、例えば、主記憶装置および補助記憶装置を用いて構成される。通信装置303は、通信に用いる構成であり、ドローン3は、通信装置303を介して、データの入出力が可能である。飛行装置304は、例えば、複数のプロペラと、各プロペラを駆動させる複数のモータと、を備える構成とすることができる。また、飛行装置304は、プロセッサ301からの出力に基づいて飛行制御を行うコントローラを備えてもよい。センサ装置305は、例えば、GPS装置、カメラ、ジャイロセンサ等の飛行制御などに利用する各種のセンサを含む。なお、荷物は、適宜に搭載され、ドローン3には、例えば、荷物を収容する収容部が形成されてもよい。
The
ドローン3の各機能(31~36)は、一例として、上記した各種の構成を適宜に用いて実現することができる。また、ドローン3には、受取人による荷物の受け取りを検知する機能を備えてもよい。ドローン3は、例えば、重量センサを備え、プロセッサ301は、重量センサが検知する荷物受け取りの前後のデータに基づいて、受取人による荷物の受け取りを判断してもよい。
Each of the functions (31 to 36) of the
位置指定装置4は、一例として、プロセッサ401と、記憶装置402と、センサ装置403と、照射装置404と、バッテリ405と、ビーコン発信装置406と、を備える。プロセッサ401は、所定の処理を実行する主体であり、適宜の半導体デバイス(例えば、CPU)を用いて構成される。記憶装置402は、所定の処理の実行に用いるプログラム等のデータを格納し、例えば、主記憶装置および補助記憶装置を用いて構成される。センサ装置403は、例えば、形状センサ、GPS装置、カメラ等を含む。照射装置404は、例えば、LED光源を用いて構成され、着陸位置を受取人に示す光を照射する。また、位置指定装置4は、例えば、照射装置404の照射の態様により、着陸位置が適切であり、着陸可能であることを示してもよい。また、位置指定装置4は、照射装置404の照射の態様により、受取人に該位置指定装置4を別の場所に設置することを促してもよい。
The
位置指定装置4の各機能(41~44)は、一例として、上記した各種の構成を適宜に用いて実現することができる。位置指定装置4は、通信装置を備え、該通信装置を用いて位置情報を制御装置1に出力し、制御装置1は、取得した位置指定装置4の位置情報に基づいて、ドローン3に指示を出力してもよい。また、位置指定装置4は、荷物管理DB18のデータから配送先の住所のデータをドローン3に出力し、ドローン3は、配送先の住所の上空で着陸位置を確認し、着陸してもよい。
The functions (41-44) of the
配達人が使用する端末5は、一例として、プロセッサ501と、記憶装置502と、通信装置503と、を備える。端末5の機能(53、54)は、一例として、上記した各種の構成を適宜に用いて実現することができる。なお、端末5は、配達員が情報を入力する入力装置を備え、この入力装置を用いて荷物のIDを認識するID読み取り機能51、位置指定装置4のIDを認識する位置指定装置認識機能52が実現されてもよい。また、端末5は、コードに格納されたデータを読み取るリーダーを備え、このリーダーを用いて、IDが格納されたコードが付された荷物、位置指定装置4に対して、機能(51、52)を実現してもよい。
The
受取人が使用するアプリ6がインストールされたユーザ装置は、例えば、プロセッサ601と、記憶装置602と、通信装置603と、入力装置604と、出力装置605と、を備える。配達人が使用する端末5、および、ユーザ装置は、例えば、スマートフォン、タブレット等であってもよい。ここで、スマートフォン、タブレット等の入力装置と出力装置が、タッチパネル等により、一体的に構成されてもよい。
The user device on which the
<第2実施形態>
次に、図12-図13を参照しながら、第2実施形態を説明する。なお、上記の説明と同様の内容の説明を省略することがある。第2実施形態では、位置指定部として、位置指定装置4に代えてシートを使用する。このシートは、IDを有し、このIDに対応するコードを備える。
Second Embodiment
Next, a second embodiment will be described with reference to Figures 12 and 13. Note that the description of the same contents as those described above may be omitted. In the second embodiment, a sheet is used as the position designation unit instead of the
本実施形態での位置指定部の例を図12に示す。位置指定部として2次元コードを備えるシートを用いる場合、軽量で安価であるため盗難などによる被害を抑えることができる。また配達員の負担も軽減できる。配達完了後、受取人に二次元コードシート7を処分してもらうことにより、回収が不要となる。また、受取人の混同を避けるため、各二次元コードシート7に受取人が認識できる形式でIDを記載しておくことで、複数の荷物が届き複数の二次元コードシート7を受け取った場合にも、受取人がそれぞれの荷物の受け取り場所を個別に指定することもできる。
An example of the position designation unit in this embodiment is shown in FIG. 12. When a sheet with a two-dimensional code is used as the position designation unit, it is lightweight and inexpensive, and therefore damage caused by theft and the like can be reduced. It also reduces the burden on the delivery person. After delivery is completed, the recipient can dispose of the two-
本実施形態での受取人の荷物受け取り手順の一例を図13に示す。不在時の荷物配送があり(S301)、配達員によって、不在通知と二次元コードシート7が届けられる。受取人の不在時において、配達員は、端末5を用いて、配達する荷物のIDと受取人に届けた二次元コードシート7のIDを紐づける。
An example of the procedure for a recipient to receive a package in this embodiment is shown in FIG. 13. A package is delivered when the recipient is not at home (S301), and the delivery person delivers a notice of absence and a two-
そして、受取人は、不在通知と合わせて二次元コードシート7をドローン着陸位置指定手段として受け取る(S302)。受取人がドローン配送を希望する場合、その旨を指定し(S303)、配送希望位置に二次元コードシート7を設置する(S305)。
The recipient then receives the two-
次に、受取人は、アプリ6を用いて、シート設置位置にドローン3が着陸できるかを判断する。まず、受取人は、シート設置位置の形状をアプリ6で読み取り、着陸が可能かを判断する(S306)。次に、受取人は、シート設置場所上空からドローン3が侵入可能かどうかをアプリ6により判断する(S307)。S306およびS307でのアプリによる判断方法としては、例えばカメラで取得したデータに基づく画像認識での判断などの方法がある。なお、このカメラは、ユーザ装置に設けられ、ユーザ装置が画像認識での判断を行ってもよい。また、カメラが取得したデータがユーザ装置に出力され、ユーザ装置が画像認識での判断を行ってもよい。
Next, the recipient uses the
ドローン3がシート上に着陸して受取人が荷物を受取り(S308)、ドローンが帰還した後に受取人が二次元コードシート7を廃棄する。またドローン配送を選択せず配達員が荷物を配送した(S304)場合、二次元コードシート7は配達員に返却しても良いし、受取人が処分しても良い。
The
なお、二次元コードを用いたシートが説明されたが、適宜の変更が行われてもよく、例えば、位置指定部として、二次元コードに代えて一次元コード(バーコード)が付されたシートが用いられてもよい。 Although a sheet using a two-dimensional code has been described, appropriate modifications may be made. For example, a sheet with a one-dimensional code (barcode) instead of a two-dimensional code may be used as the position designation section.
本実施形態での制御装置1、ドローン3等の具体的な構成は、第1実施形態の場合と同様とすることができる。なお、構成は適宜に変更してもよい。例えば、位置指定部としてコードが付されたシートを使用し、位置指定装置4は使用しないので、位置指定装置4に関する構成が省略されてもよい。本実施形態では、ドローン3がカメラを用いて位置指定部のコードの画像を認識することで、着陸場所の選定が可能である。従って、ビーコンの送受信に関する構成は省略されてもよい。
The specific configuration of the
<第3実施形態>
次に、図14-図16を参照しながら、第3実施形態を説明する。なお、上記の説明と同様の内容の説明を省略することがある。第3実施形態では、受取人のアプリで再配達位置を指示する場合について説明する。アプリにより再配達位置を指定する場合、配達人は位置指定部を受取人に届ける必要がなくなる。これにより、盗難の危険性をなくし、配達、回収のコストを削減できる。
Third Embodiment
Next, a third embodiment will be described with reference to Figs. 14 to 16. Note that the same content as the above description may be omitted. In the third embodiment, a case where a redelivery location is specified by a recipient's app will be described. When a redelivery location is specified by an app, the delivery person does not need to deliver the location specification unit to the recipient. This eliminates the risk of theft and reduces delivery and collection costs.
本実施形態でのシステム構成の一例を図14に示す。図14に示すように、宅配管理システムは、ドローンによる再配達を指示する制御装置1と、顧客に荷物を配達するドローン3と、顧客が再配達方法とドローン着陸位置を指示するアプリケーション6を格納するユーザ装置と、を備える。制御装置1は、再配達センタ2に設置されている。
An example of the system configuration in this embodiment is shown in FIG. 14. As shown in FIG. 14, the home delivery management system includes a
本実施形態での受取人の荷物受け取り手順の一例を図15に示す。また、受取人のアプリ6の着陸位置指定画面の例を図16に示す。
An example of the recipient's procedure for receiving luggage in this embodiment is shown in FIG. 15. Also, an example of the landing location designation screen of the recipient's
不在時の荷物配送があり(S401)、配達員によって、不在通知が届けられる。そして、受取人は、不在通知を受け取り(S402)、受取人がドローン配送を希望する場合、その旨を指定する(S403)。なお、ドローン配送を希望しない場合、受取人は、再配達する配送員から荷物を受け取る(S404)。 When a package is delivered when the recipient is not at home (S401), the delivery person will leave a notice of absence. The recipient then receives the notice of absence (S402), and if the recipient wishes to use drone delivery, they can specify this (S403). If the recipient does not wish to use drone delivery, the recipient will receive the package from the delivery person who will redeliver it (S404).
受取人は、アプリ6で再配達位置を指定する際(S405)、希望の受け取り位置の画像を撮影する。その際に、アプリは、GPSなどから位置座標を取得し、地図上に表示し、受取人は、確認、修正等を行う。アプリは、撮影された画像から着陸が可能か、ドローンが上空から侵入可能かを判断し、その可否を受取人に示す。 When the recipient specifies a redelivery location in the app 6 (S405), they take an image of the desired pickup location. At that time, the app obtains the location coordinates from a GPS or similar device and displays them on a map, and the recipient can confirm and correct them. From the captured image, the app determines whether landing is possible and whether a drone can enter from the sky, and notifies the recipient of this possibility.
具体的に説明すると、図16に示すように、アプリ6の画面(詳細には、本実施形態では、アプリ6がインストールされたスマートフォンであるユーザ装置の画面)には、取得した位置座標を含むマップ情報61と撮影画像62が含まれる。受取人は、希望の受け取り位置を撮影し、撮影画像62を表示させる。そして、受取人は、撮影画像62上で希望する着陸位置に枠63を合わせ、決定ボタン64を押す。なお、ユーザ装置はカメラを備え、該カメラを用いて撮影画像62が取得されてもよい。また、カメラが取得したデータがユーザ装置に出力され、撮影画像62が取得されてもよい。
To be more specific, as shown in FIG. 16, the screen of the app 6 (more specifically, the screen of the user device, which is a smartphone on which the
そして、枠63内の形状が読み取られ、アプリ6により着陸可能かどうかが判断される。ここで、着陸不可と判断された場合、アプリ6は着陸位置の再設定を促す出力を行う。着陸可能と判断された場合、アプリ6はその旨を出力し、受取人は上空を撮影する。ここで、ユーザ装置がカメラを備え、該カメラを用いて上空の撮影が行われてもよい。また、受取人は、適宜のカメラを用いて上空を撮影し、該カメラが取得したデータがユーザ装置に出力されてもよい。
Then, the shape inside the
そして、ドローンの侵入可能の判断が行われ、アプリ6はその結果を出力する。ドローンが侵入不可であることを判断した場合、アプリ6は着陸位置の再設定を促す出力を行う。なお、アプリ6による判断は、例えば、公知の画像認識に基づいて行うことができる。
Then, a determination is made as to whether the drone can enter, and the
受取位置として適当とアプリ6に判断された場合、アプリ6は、撮影地点の座標情報と撮影画像62を再配達センタ2の制御装置1に通知する。制御装置1は、座標情報と画像情報をドローン3に出力し、ドローン3に着陸位置の指示をする。ドローンは、指定された座標において、画像認識技術を用いて、着陸地点として指示された撮影画像62と一致する場所を捜索(判断)し、その場所に着陸する(S406)。そして、ドローン3は荷物を受け渡し後、再配達センタ2に帰還する(S407)。
If the
本実施形態での制御装置1、ドローン3等の具体的な構成は、第1実施形態の場合と同様とすることができる。なお、構成は適宜に変更してもよい。例えば、アプリ6を用いて位置の指定が行われ、位置指定装置4は使用しないので、位置指定装置4に関する構成が省略されてもよい。本実施形態では、ドローン3がカメラを用いて取得する画像と、アプリ6から取得する撮影画像62と、を用いた画像認識により、着陸場所の選定が可能である。従って、ビーコンの送受信に関する構成は省略されてもよい。
The specific configuration of the
<第4実施形態>
次に、図17-図19を参照しながら、第4実施形態を説明する。なお、上記の説明と同様の内容の説明を省略することがある。第4実施形態では、再配達希望位置を選択可能な場所から選択する場合を説明する。
Fourth Embodiment
Next, a fourth embodiment will be described with reference to Figures 17 to 19. Note that the description of the same contents as those described above may be omitted. In the fourth embodiment, a case where a desired redelivery location is selected from selectable locations will be described.
本実施形態では、配達事業者は、あらかじめドローン3が着陸可能な場所を配達エリア内に確保し、位置指定部(例えば、位置指定装置4、コードが付されたシート)を設置しておく。受取人は、その着陸可能な場所から都合の良い場所を選択し、希望受け取り時刻(あるいは、時間帯)の情報等と共に制御装置1に通知する。
In this embodiment, the delivery company reserves a location within the delivery area where the
制御装置1は、受取人が指定した場所に設置されている位置指定部と配達する荷物を紐づけし、例えば受取人が指定した時刻(あるいは、時間帯)に基づいて、ドローン3に荷物の配達を指示する。受取人は、指定した時刻(あるいは、時間帯)にその場所でドローン3から荷物を受け取る。受取人は、自身でドローン3の着陸地点を設定する必要がないため、都市部、集合住宅など、ドローン3の着陸場所確保が困難な地域でも、迅速に再配達荷物を受け取ることができる。
The
本実施形態でのシステム構成の一例を図17に示す。図17に示すように、宅配管理システムは、ドローンによる再配達を指示する制御装置1と、顧客に荷物を配達するドローン3と、位置指定部の一例であり、ドローン着陸位置を指定する位置指定装置4と、を備える。なお、制御装置1は、再配達センタ2に設置されている。このシステムにおいて、位置指定装置4は、位置指定部である二次元コードシート7(あるいは、一次元コードシート)に変更されてもよい。
An example of the system configuration in this embodiment is shown in FIG. 17. As shown in FIG. 17, the home delivery management system includes a
本実施形態での受取人の荷物受け取り手順の一例を図18に示す。また、再配達場所指定画面の例を図19に示す。 An example of the procedure for the recipient to receive the package in this embodiment is shown in Figure 18. Also, an example of the redelivery location designation screen is shown in Figure 19.
不在時の荷物配送があり(S501)、配達員によって、不在通知が届けられる。そして、受取人は、不在通知を受け取り(S502)、受取人がドローン配送を希望する場合、その旨を指定し、再配達場所指定画面8を用いて希望時間を指定する(S503)。また、指定画面から再配達位置を選択する(S505)。なお、ドローン配送を希望しない場合、受取人は、再配達する配送員から荷物を受け取る(S504)。
When a package is delivered when the recipient is not at home (S501), the delivery person delivers a notice of absence. The recipient then receives the notice of absence (S502), and if the recipient wishes to use drone delivery, the recipient specifies this and uses the redelivery
再配達場所指定画面8は、受取人のアプリ6、PC(パーソナルコンピュータ)等からアクセス可能である。受取人は、指定画面に表示された配達可能スポット81から自身が荷物を受け取るのに都合の良い場所を指定し、不在通知に記載された荷物のIDと希望配達日時を入力する。そして、入力情報が制御装置1に送信され、制御装置1は、入力情報に従ってドローン3に対し荷物の配達を指示する。
The redelivery
そして、受取人は、指定した日時にその場所に赴きドローン3から荷物を受け取る(S506)。ドローン3は、荷物を配達後、再配達センタ2に帰還する(S507)。
Then, the recipient goes to the location at the specified date and time to receive the package from the drone 3 (S506). After delivering the package, the
本実施形態での制御装置1、ドローン3等の具体的な構成は、第1実施形態の場合と同様とすることができる。なお、構成は適宜に変更してもよい。例えば、位置指定部の構成に応じて、システムの構成が適宜に変更されてもよい。
The specific configuration of the
以上の実施形態の説明によれば、配達側は、荷物の再配達はドローンに任せられるので、基本的に1つの荷物は1回だけ配達すればよくなり、負担を大きく軽減できる。受け取り側は、受取時間(あるいは時刻)を設定でき、荷物を受け取る場所をピンポイントで設定できるため、利便性が向上する。 According to the above description of the embodiment, the delivery party can leave the redelivery of the package to the drone, so basically each package only needs to be delivered once, greatly reducing the burden on the delivery party. The recipient can set the pick-up time (or time of day) and pinpoint the location where the package will be picked up, improving convenience.
また、ドローンの使用を再配達にのみ適用することで、サービス提供開始のために必要なドローンの機体数を低減することができる。また、荷物の受け渡しは機体の着陸後とすることで、空中での受け渡しと比べて運べる荷物が多様となる。 In addition, by limiting the use of drones to redelivery, the number of drones required to start providing the service can be reduced. Also, by handing over packages after the drone has landed, a wider variety of packages can be transported compared to delivery in the air.
また、配達員の心理的な負担を軽減することで、社会的な観点で貢献することができる。また、再配達の費用を抑制し、経済的な観点で貢献することができる。 In addition, it will contribute from a social perspective by reducing the psychological burden on delivery personnel. It will also contribute from an economic perspective by reducing the cost of redelivery.
以上の実施形態によれば、一例として、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体(ドローン3)と飛行体に行き先を指示する制御装置1と着陸位置を指示する位置指定部(例えば、位置指定装置4、コードが付されたシート)と位置指定部の識別子と配達する荷物を紐づける端末5とを含む宅配管理システムであり、配達先からの指示された時刻(あるいは、時間帯)に基づき飛行体3がその荷物に紐づけられた位置指定装置4の場所に荷物を配達する。
According to the above embodiment, the following delivery management system is provided as an example. This delivery management system includes an aircraft (drone 3) that delivers packages, a
これによれば、宅配業務において受取人が不在の場合、受取人がドローンの着陸位置を確保し、配達員がドローンを誘導する位置指定部を不在票と共に受取人に届けることで、ドローンを用いた自動再配達システムが実現する。 According to this, when a recipient is not at home during a parcel delivery operation, the recipient secures a landing position for the drone, and the delivery person delivers a location designation unit for guiding the drone to the recipient along with a delivery slip, thereby realizing an automatic redelivery system using drones.
また、一例として、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体(ドローン3)と飛行体に行き先を指示する制御装置1と着陸位置を指示する位置指定のアプリケーション6を含む宅配管理システムであり、荷物の受取人が持つアプリケーション6が飛行体の着陸可否を判断し、着陸可能な配達先の場所と配達希望時刻(あるいは、配達希望時間帯)を制御装置1に連絡し、制御装置1が配達先からの指示された時刻(あるいは、時間帯)に基づき飛行体に発進を指示し、飛行体がアプリ6より伝えられた配達先に荷物を配達する。
As an example, the following delivery management system is provided. This delivery management system includes an aircraft (drone 3) that delivers packages, a
これによれば、受取人が位置指定のアプリを利用して着陸位置および配達時間(あるいは、配達時刻)を設定することができる自動再配達システムが実現する。 This will realize an automatic redelivery system that allows recipients to set the landing location and delivery time (or delivery time) using a location-designated app.
また、一例として、下記の宅配管理システムが提供される。この宅配管理システムは、荷物を配達する飛行体(ドローン3)と飛行体に行き先を指示する制御装置1と着陸位置を指示する位置指定部(例えば、位置指定装置4、コードが付されたシート)とを含む宅配管理システムであり、荷物の受取人は宅配管理システムに提示された選択肢の中から希望する受け取り場所を選択し、制御装置1は選択された受け取り場所に紐づいた位置指定部を配達先に設定し、飛行体は指示された時刻(あるいは、時間帯)に基づき指定された位置指定部の場所に荷物を配達する。
As an example, the following delivery management system is provided. This delivery management system includes an aircraft (drone 3) that delivers packages, a
これによれば、予め位置指定部が配置された受け取り場所から受取人が選択した受け取り場所に、ドローンを用いて荷物を配送することができる自動再配達システムが実現する。 This will realize an automatic redelivery system that can use a drone to deliver parcels from a receiving location where a location designation unit has been placed in advance to a receiving location selected by the recipient.
以上、実施形態について説明されたが、本発明は前述した実施形態に限定されるものではなく、添付した特許請求の範囲の趣旨内における様々な変形例及び同等の構成が含まれる。例えば、前述した実施形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに本発明は限定されない。また、例えば、実施形態の構成の一部について、他の構成の追加、削除、置換をしてもよい。 Although the embodiments have been described above, the present invention is not limited to the above-described embodiments, and includes various modified examples and equivalent configurations within the spirit of the appended claims. For example, the above-described embodiments have been described in detail to clearly explain the present invention, and the present invention is not necessarily limited to having all of the configurations described. Also, for example, other configurations may be added to, deleted from, or replaced with part of the configuration of the embodiments.
1 制御装置
2 再配達センタ
3 ドローン
4 位置指定装置
5 端末
6 アプリケーション
7 二次元バーコードシート
8 再配達場所指定画面
18 荷物管理DB
19 再配達方法選択画面
1
19 Redelivery method selection screen
Claims (15)
荷物を配達する飛行体と、
飛行体に行き先を指示する制御装置と、
着陸位置を指示する位置指定部と、
位置指定部の識別子と配達する荷物を紐づける端末と、
を備え、
前記宅配管理システムは、
配達先の荷物に紐づけられた位置指定部の場所に、配達先から指示された時間あるいは時刻に基づき飛行体を用いて前記荷物を配達する、
ことを特徴とする宅配管理システム。 A home delivery management system,
An aircraft that delivers luggage;
A control device that instructs the aircraft on its destination;
A position designation unit that designates a landing position;
a terminal that links the identifier of the location specification unit with the package to be delivered;
Equipped with
The home delivery management system includes:
Delivering the package to a location specified by a location designation unit associated with the package by using an aircraft based on a time or a time designated by the package recipient;
A home delivery management system characterized by the above.
前記位置指定部は、
前記飛行体が着陸可能であるかを判断し、前記飛行体を着陸位置に誘導する位置指定装置である、
ことを特徴とする宅配管理システム。 The home delivery management system according to claim 1,
The position designation unit is
A position designation device that determines whether the aircraft is able to land and guides the aircraft to a landing position.
A home delivery management system characterized by the above.
前記位置指定部は、
識別子に対応するコードを備え、
前記飛行体は、
前記コードを上空から確認して自機の着陸位置と認識し、そこに着陸して荷物を配送する、
ことを特徴とする宅配管理システム。 The home delivery management system according to claim 1,
The position designation unit is
A code corresponding to the identifier is provided;
The flying object is
The code is confirmed from the air, the aircraft recognizes the landing position, lands there and delivers the package.
A home delivery management system characterized by the above.
荷物を配達後に受取人が位置指定部を飛行体に搭載することで飛行体が帰還可能になる、
ことを特徴とする宅配管理システム。 The home delivery management system according to claim 1,
After delivering the package, the recipient can mount the location designation unit on the aircraft, allowing the aircraft to return home.
A home delivery management system characterized by the above.
荷物を配達する飛行体と、
飛行体に行き先を指示する制御装置と、
配送の指示に用いるアプリケーションを格納するユーザ装置と、
を備え、
前記ユーザ装置は、
前記アプリケーションを用いて飛行体の着陸可否を判断し、着陸可能な配達先の場所と配達時間あるいは配達時刻を制御装置に出力し、
前記宅配管理システムは、
前記アプリケーションにより伝えられた場所に、配達先から指示された配達時間あるいは配達時刻に基づき飛行体を用いて前記荷物を配達する、
ことを特徴とする宅配管理システム。 A home delivery management system,
An aircraft that delivers luggage;
A control device that instructs the aircraft on its destination;
A user device that stores an application used for instructing delivery;
Equipped with
The user device includes:
Using the application, determine whether the aircraft can land, and output the location of the delivery destination where landing is possible and the delivery time or delivery time slot to a control device;
The home delivery management system includes:
Delivering the package to the location communicated by the application using an aircraft based on the delivery time or delivery time instructed by the delivery destination;
A home delivery management system characterized by the above.
飛行体に行き先を指示する制御装置と、
荷物の受け取り場所に配置される位置指定部と、
配送の指示に用いるユーザ装置と、
を備え、
前記ユーザ装置は、
複数の荷物の受け取り場所を荷物の受取人に提示し、荷物の受取人によって選択された受け取り場所、および、配達時間あるいは配達時刻を制御装置に出力し、
前記制御装置は、
前記の受け取り場所に紐づいた位置指定部を配達先に設定し、
前記飛行体は、
指示された配達時間あるいは配達時刻に、設定された位置指定部の場所に荷物を配達する、
ことを特徴とする宅配管理システム。 An aircraft that delivers luggage;
A control device that instructs the aircraft on its destination;
A location designation unit disposed at a baggage receiving location;
A user device used to give delivery instructions;
Equipped with
The user device includes:
presenting a plurality of locations for receiving the package to the recipient of the package, and outputting the location for receiving the package selected by the recipient of the package and the delivery time or delivery time slot to the control device;
The control device includes:
A location designation unit associated with the receiving location is set as a delivery destination,
The flying object is
Deliver the package to the location specified in the designated location section at the designated delivery time or delivery time;
A home delivery management system characterized by the above.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023110070A JP2025008146A (en) | 2023-07-04 | 2023-07-04 | Home delivery management system, control device, flying object, position designation unit, terminal, user device |
| PCT/JP2024/022849 WO2025009432A1 (en) | 2023-07-04 | 2024-06-24 | Home delivery management system, control device, aircraft, location designation unit, terminal, and user device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023110070A JP2025008146A (en) | 2023-07-04 | 2023-07-04 | Home delivery management system, control device, flying object, position designation unit, terminal, user device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2025008146A true JP2025008146A (en) | 2025-01-20 |
Family
ID=94172020
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023110070A Pending JP2025008146A (en) | 2023-07-04 | 2023-07-04 | Home delivery management system, control device, flying object, position designation unit, terminal, user device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2025008146A (en) |
| WO (1) | WO2025009432A1 (en) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6201092B1 (en) * | 2017-03-10 | 2017-09-20 | 忍 有田 | Unattended automatic delivery device for delivery |
| CN112005261A (en) * | 2019-03-11 | 2020-11-27 | 乐天株式会社 | Distribution system, control device, distribution method and control method |
| JP7100755B1 (en) * | 2021-12-01 | 2022-07-13 | 株式会社長栄 | Delivery box |
-
2023
- 2023-07-04 JP JP2023110070A patent/JP2025008146A/en active Pending
-
2024
- 2024-06-24 WO PCT/JP2024/022849 patent/WO2025009432A1/en active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| WO2025009432A1 (en) | 2025-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10650342B2 (en) | Machine-readable delivery platform for automated package delivery | |
| KR101869500B1 (en) | Automated package relocation from an unmanned kiosk | |
| EP3859654B1 (en) | Baggage management system and server used for baggage management system | |
| US20160012393A1 (en) | Parcel delivery method using an unmanned aerial vehicle | |
| US11625664B2 (en) | Apparatus and method for freight delivery and pick-up | |
| JP6786130B2 (en) | Unmanned aerial vehicle reservation management device | |
| JP6778847B1 (en) | Cargo port management system, cargo port management method, and program | |
| US20180330323A1 (en) | Automated package delivery to unmanned kiosk | |
| US20180299880A1 (en) | Information processing device, information processing method, and transportation system | |
| JP6556532B2 (en) | COMMUNICATION DEVICE, CARRYING AUXILIARY DEVICE AND CARRYING SYSTEM | |
| JP2020135028A (en) | Information processing device | |
| WO2020067433A1 (en) | Baggage management system and server used for baggage management system | |
| JP2025008146A (en) | Home delivery management system, control device, flying object, position designation unit, terminal, user device | |
| CN114072828A (en) | Improved consignment delivery at mobile transport units | |
| WO2018212315A1 (en) | Baggage management system | |
| JP7588430B2 (en) | Data relay terminal, computer program, and system for implementing drone delivery service | |
| JP7776748B2 (en) | security system | |
| JP2020042581A (en) | Information processing device, information processing method, and program | |
| JP2024005381A5 (en) | ||
| CN119604879A (en) | Information processing system, information processing device, information processing method and program product |