JP2020016619A - 圧力センサ - Google Patents
圧力センサ Download PDFInfo
- Publication number
- JP2020016619A JP2020016619A JP2018141768A JP2018141768A JP2020016619A JP 2020016619 A JP2020016619 A JP 2020016619A JP 2018141768 A JP2018141768 A JP 2018141768A JP 2018141768 A JP2018141768 A JP 2018141768A JP 2020016619 A JP2020016619 A JP 2020016619A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- diaphragm
- pressure sensor
- region
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000004891 communication Methods 0.000 claims description 16
- 230000015572 biosynthetic process Effects 0.000 claims description 5
- 230000001681 protective effect Effects 0.000 abstract description 12
- 238000010586 diagram Methods 0.000 abstract 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 17
- 229910052710 silicon Inorganic materials 0.000 description 17
- 239000010703 silicon Substances 0.000 description 17
- 230000035945 sensitivity Effects 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 5
- 238000002474 experimental method Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 239000000758 substrate Substances 0.000 description 3
- 238000001312 dry etching Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 239000012530 fluid Substances 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910001414 potassium ion Inorganic materials 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 229910001415 sodium ion Inorganic materials 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/0041—Transmitting or indicating the displacement of flexible diaphragms
- G01L9/0051—Transmitting or indicating the displacement of flexible diaphragms using variations in ohmic resistance
- G01L9/0052—Transmitting or indicating the displacement of flexible diaphragms using variations in ohmic resistance of piezoresistive elements
- G01L9/0054—Transmitting or indicating the displacement of flexible diaphragms using variations in ohmic resistance of piezoresistive elements integral with a semiconducting diaphragm
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/22—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using resistance strain gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L19/00—Details of, or accessories for, apparatus for measuring steady or quasi-steady pressure of a fluent medium insofar as such details or accessories are not special to particular types of pressure gauges
- G01L19/06—Means for preventing overload or deleterious influence of the measured medium on the measuring device or vice versa
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L7/00—Measuring the steady or quasi-steady pressure of a fluid or a fluent solid material by mechanical or fluid pressure-sensitive elements
- G01L7/02—Measuring the steady or quasi-steady pressure of a fluid or a fluent solid material by mechanical or fluid pressure-sensitive elements in the form of elastically-deformable gauges
- G01L7/08—Measuring the steady or quasi-steady pressure of a fluid or a fluent solid material by mechanical or fluid pressure-sensitive elements in the form of elastically-deformable gauges of the flexible-diaphragm type
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L9/00—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means
- G01L9/02—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means by making use of variations in ohmic resistance, e.g. of potentiometers, electric circuits therefor, e.g. bridges, amplifiers or signal conditioning
- G01L9/04—Measuring steady of quasi-steady pressure of fluid or fluent solid material by electric or magnetic pressure-sensitive elements; Transmitting or indicating the displacement of mechanical pressure-sensitive elements, used to measure the steady or quasi-steady pressure of a fluid or fluent solid material, by electric or magnetic means by making use of variations in ohmic resistance, e.g. of potentiometers, electric circuits therefor, e.g. bridges, amplifiers or signal conditioning of resistance-strain gauges
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measuring Fluid Pressure (AREA)
- Pressure Sensors (AREA)
Abstract
【解決手段】感圧部11を有するダイアフラム3を備える。感圧部11は、下面11a(表面と裏面とのうち一方の面)に凹部13が形成されることにより厚みが厚い領域Bと薄い領域とに分けられている。感圧部11の厚みが厚い領域Bであって、凹部13が形成されていない上面11bにピエゾ抵抗素子を含むセンサゲージ21が設けられている。
【選択図】 図1
Description
この圧力センサのピエゾ抵抗素子は、上述した凹部とともに感圧部の上記表面に設けられている。
一般的に、ダイアフラムのピエゾ抵抗素子が設けられている表面は、酸化膜で覆われていることが多い。
さらに、特許文献1に示す圧力センサでは、感度を高くするためにダイアフラムが撓み易くなるから、過大な圧力がダイアフラムに作用したときにダイアフラムが破損するおそれがあった。
センサゲージが設けられている面を保護膜で覆うにあたって、保護膜に角部が形成されることがなく、応力が集中することがない。このため、圧力センサの保護を十分に行うことが可能になる。
したがって、本発明によれば、出力値のヒステリシスが小さくなるとともに、表面を保護膜で確実に覆って保護することが可能な高感度の圧力センサを提供することができる。
以下、本発明に係る圧力センサの一実施の形態を図1〜図3を参照して詳細に説明する。図1の破断位置は、図2中にI−I線によって示した位置である。
図1に示す圧力センサ1は、図1において下側に位置するベース部材2と、このベース部材2に接合されたダイアフラム3と、このダイアフラム3に接合されたストッパ部材4とを備えている。図1は、圧力センサ1の中心線Cから一側方に位置する半分のみを図示している。この圧力センサ1の構成部品を説明するにあたっては、便宜上、図1の上側に位置する面を上面といい、図1において下側に位置する面を下面という。
凹陥部5は、圧力センサ1内に圧力室6を形成するためにベース部材2に設けられており、ベース部材2の上面に開口している。凹陥部5の形状は、ベース部材2の厚み方向から見て円形である。このベース部材2の幅方向の中央部には、圧力室6内に被測定圧力を導入するための貫通孔7が穿設されている。
ダイアフラム3の感圧部11は、表面と裏面とのうち一方の面(図1においては凹陥部5と対向する下面11a)に複数の凹部13が形成されている。この実施の形態による凹部13は、図2に示すように、感圧部11の中心Pの周囲の4箇所に設けられている。
凹部13は、感圧部11の下面に例えばドライエッチングを施すことによって、所定の形状、深さに形成することができる。
図1に示すように、感圧部11の厚い領域Bであって、表面と裏面とのうち凹部13が形成されていない面(図1においては上面11b)には、ピエゾ抵抗素子を含むセンサゲージ21が設けられている。このセンサゲージ21は、図2に示すように、上述した4箇所の端部E1〜E4にそれぞれ設けられている。4箇所の端部E1〜E4は、ダイアフラム3の厚み方向から見てセンサゲージ21の形成範囲より大きく形成されている。
センサゲージ21が形成されている部分を含めてダイアフラム3の上面3aには、図示してはいないが、酸化膜などの保護膜が設けられている。
このストッパ部材4は、ダイアフラム3の感圧部11と対向する部位に凹曲面によって形成された凹部22を有している。
凹部22は、ストッパ部材4の厚み方向から見て円形に形成されている。また、凹部22を構成する凹曲面は、いわゆる非球面で、ダイアフラム3の感圧部11が圧力室6内の圧力によって押されて変形したときの感圧部11に倣う形状に形成されている。このため、感圧部11は、圧力室6内の圧力で押されて変形することによって、その上面11bの全域が凹部22の凹曲面に密着するようになる。このような凹部22は、例えばドライエッチングによって形成することができる。
感圧部11が凹部22の凹曲面に密着する状態においては、感圧部11の中央部、すなわち厚い領域Bの円形部14が連通孔23と重なる。円形部14は、ダイアフラム3の厚み方向において、連通孔23より大きいから、上述したように感圧部11が凹曲面に密着するときには連通孔23の開口部分を覆うようになる。
圧力センサ1を製造するためは、先ず、図3(A)に示すように、ダイアフラム3の母材であるシリコンウェハ31の上面31aにセンサゲージ21を形成し、このシリコンウェハ31の上面31aにストッパ部材4を接合する。なお、図示してはいないが、センサゲージ21に接続する配線は、ストッパ部材4がシリコンウェハ31に接合される以前にシリコンウェハ31の上面31aに形成される。シリコンウェハ31の上面31aには、センサゲージ21や配線が設けられた後に酸化膜などの保護膜が設けられる。
したがって、この実施の形態によれば、出力値のヒステリシスが小さくなるとともに、表面を保護膜で確実に覆って保護することが可能な高感度の圧力センサを提供することができる。
このため、複数のピエゾ抵抗素子を使用して圧力を高い精度で検出可能な圧力センサを提供することができる。
このため、ダイアフラム3の感圧部11に圧力室6側から過大な圧力が加えられた場合は、感圧部11がストッパ部材4の凹部22に密着し、それ以上の感圧部11の変形が規制される。したがって、感度が高くなる構成を採りながら、ダイアフラム3が破損することを防ぐことが可能な圧力センサを提供することができる。
本発明に係る圧力センサは、図4および図5に示すように、第1の実施の形態で示したストッパ部材を使用することなく実現することができる。図4および図5において、図1〜図3によって説明したものと同一もしくは同等の部材については、同一符号を付し詳細な説明を適宜省略する。
この実施の形態による凹部13は、ダイアフラム3の上面3aに形成されている。ピエゾ抵抗素子を含むセンサゲージ21は、ダイアフラム3の下面3bに設けられている。凹部13と同一位置にある厚みが薄い領域Aの構成と、凹部13が形成されていない厚みが厚い領域Bの構成は、第1の実施の形態を採るときと同一である。
ダイアフラムの感圧部の厚い領域は、図6および図7に示すように形成することができる。図6および図7において、図1〜図3によって説明したものと同一もしくは同等の部材については、同一符号を付し詳細な説明を適宜省略する。
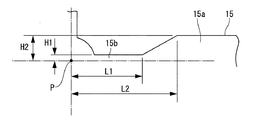
図6に示すダイアフラム3の感圧部11には、ダイアフラム3の厚み方向から見て十字状に厚い領域Bが形成されている。この厚い領域Bの4本の帯状部15は、センサゲージ21が設けられている外側部分15aと、センサゲージ21が設けられていない内側部分15bとで幅が異なっている。すなわち、センサゲージ21が設けられていない内側部分15bは、ダイアフラム3の厚み方向から見て、センサゲージ21が設けられている外側部分15aに較べて細く形成されている。外側部分15aと内側部分15bとの境界部分は、傾斜面によって形成されている。
この実験は、図7に示すように、長さL1,L2、幅H1,H2を定めて行った。長さL1は、感圧部11の中心Pからの内側部分15bの長さである。長さL2は、感圧部11の中心Pから外側部分15aの最も内側となる位置までの長さである。内側部分15bの幅H1は、内側部分15bの幅の1/2である。幅H2は、外側部分15aの幅の1/2である。この実験は、幅H2を一定として行った。
出力が最大になるときの長さL2は、図9に示すように、0に近く、出力が最大になる長さL1より僅かに長いことが判った。
出力が最大になるときの幅H1は、図10に示すように、最大幅と最小幅との間に存在することが判った。
ダイアフラム3の感圧部11の厚い領域Bの形状は、適宜変更することが可能である。帯状部15は、例えば図11〜図13に示すように形成することができる。
図11に示す厚い領域Bは、ダイアフラム3の厚み方向から見て十字状に形成されている。この厚い領域Bを構成する4本の帯状部15は、形成範囲の全域にわたって幅が一定になるように形成されている。
図13に示す厚い領域Bは、ダイアフラム3の厚み方向から見てL字状に形成されている。
厚い領域Bを図11〜図13に示すように形成したとしても、上述した各実施の形態を採る場合と同様に、出力値のヒステリシスが小さくなるとともに、表面を保護膜で確実に覆って保護することが可能な高感度の圧力センサが得られる。
Claims (5)
- 感圧部を有するダイアフラムを備え、
前記感圧部は、表面と裏面とのうち一方の面に凹部が形成されることにより厚みが厚い領域と薄い領域とに分けられ、
前記感圧部の厚みが厚い領域であって、表面と裏面とのうち前記凹部が形成されていない面にピエゾ抵抗素子を含むセンサゲージが設けられていることを特徴とする圧力センサ。 - 請求項1記載の圧力センサにおいて、
前記厚みが厚い領域は、前記ダイアフラムの厚み方向から見て前記感圧部の中心と、前記中心から離間した複数の端部とを結ぶ形状に形成され、
前記複数の端部は、前記ダイアフラムの厚み方向から見て前記センサゲージの形成範囲より大きく形成され、
前記センサゲージは、前記複数の端部にそれぞれ設けられていることを特徴とする圧力センサ。 - 請求項2記載の圧力センサにおいて、
前記厚みが厚い領域における前記センサゲージが設けられていない部分は、前記ダイアフラムの厚み方向から見て、前記センサゲージが設けられている部分に較べて細く形成されていることを特徴とする圧力センサ。 - 請求項1ないし請求項3のうちいずれか一つに記載の圧力センサにおいて、
さらに、前記ダイアフラムの前記凹部が形成されていない面に接合されたストッパ部材を備え、
前記ストッパ部材は、前記感圧部と対向する部位に凹曲面によって形成された凹部を有し、
前記凹部は、変形した前記感圧部に倣う形状に形成されていることを特徴とする圧力センサ。 - 請求項4記載の圧力センサにおいて、
前記ストッパ部材は、前記凹部の内外を連通する連通孔を有し、
前記感圧部は、変形することにより前記厚みが厚い領域が前記連通孔と重なるように形成されていることを特徴とする圧力センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018141768A JP2020016619A (ja) | 2018-07-27 | 2018-07-27 | 圧力センサ |
| KR1020190079930A KR102234831B1 (ko) | 2018-07-27 | 2019-07-03 | 압력 센서 |
| CN201910670884.4A CN110779638A (zh) | 2018-07-27 | 2019-07-24 | 压力传感器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018141768A JP2020016619A (ja) | 2018-07-27 | 2018-07-27 | 圧力センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2020016619A true JP2020016619A (ja) | 2020-01-30 |
Family
ID=69383898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018141768A Pending JP2020016619A (ja) | 2018-07-27 | 2018-07-27 | 圧力センサ |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP2020016619A (ja) |
| KR (1) | KR102234831B1 (ja) |
| CN (1) | CN110779638A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112444338A (zh) * | 2019-09-05 | 2021-03-05 | 三美电机株式会社 | 压力感测元件以及压力传感器 |
| JP2021039042A (ja) * | 2019-09-05 | 2021-03-11 | ミツミ電機株式会社 | 圧力感知素子及び圧力センサ |
| WO2024218902A1 (ja) * | 2023-04-19 | 2024-10-24 | 三菱電機株式会社 | 半導体圧力センサ |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5178016A (en) * | 1989-11-15 | 1993-01-12 | Sensym, Incorporated | Silicon pressure sensor chip with a shear element on a sculptured diaphragm |
| JPH07140027A (ja) * | 1993-11-18 | 1995-06-02 | Fujikura Ltd | 半導体圧力センサ |
| JP2002071492A (ja) * | 2000-08-31 | 2002-03-08 | Sony Corp | 圧力センサデバイス及び信号処理装置 |
| JP2005069736A (ja) * | 2003-08-20 | 2005-03-17 | Yamatake Corp | 圧力センサ装置 |
| JP2008039760A (ja) * | 2006-07-14 | 2008-02-21 | Denso Corp | 圧力センサ |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2049351U (zh) * | 1989-05-30 | 1989-12-13 | 复旦大学 | 十字梁岛结构的硅力传感器 |
| JPH06241930A (ja) * | 1993-02-17 | 1994-09-02 | Fuji Electric Co Ltd | 半導体圧力センサ |
| JPH075060A (ja) * | 1993-06-15 | 1995-01-10 | Fujikura Ltd | 半導体圧力センサ |
| JPH10142086A (ja) | 1996-11-07 | 1998-05-29 | Hitachi Ltd | 半導体圧力センサとその製造方法及びこれを用いた差圧伝送器 |
| JP3969228B2 (ja) | 2002-07-19 | 2007-09-05 | 松下電工株式会社 | 機械的変形量検出センサ及びそれを用いた加速度センサ、圧力センサ |
| JP2005043159A (ja) | 2003-07-25 | 2005-02-17 | Hitachi Unisia Automotive Ltd | 圧力センサ |
| JP2006003100A (ja) | 2004-06-15 | 2006-01-05 | Canon Inc | ピエゾ抵抗型圧力センサ |
| DE102007010913A1 (de) * | 2007-03-05 | 2008-09-11 | Endress + Hauser Gmbh + Co. Kg | Drucksensor |
| JP5436404B2 (ja) * | 2010-12-17 | 2014-03-05 | 三菱電機株式会社 | 半導体圧力センサ及びその製造方法 |
| CN102636298B (zh) * | 2012-03-16 | 2013-12-04 | 西安交通大学 | 一种梁膜四岛结构微压高过载传感器芯片 |
| US9267857B2 (en) * | 2014-01-07 | 2016-02-23 | Honeywell International Inc. | Pressure sensor having a bossed diaphragm |
| JP6034818B2 (ja) * | 2014-03-04 | 2016-11-30 | アズビル株式会社 | 圧力センサチップ |
| CN106404237B (zh) * | 2015-07-29 | 2021-06-01 | 浙江盾安人工环境股份有限公司 | 压力传感器芯片及制备方法、绝压传感器芯片 |
| CN105300573B (zh) * | 2015-11-06 | 2018-01-05 | 西安交通大学 | 一种梁膜结构压电传感器及其制作方法 |
| CN107941407B (zh) * | 2017-11-19 | 2019-05-21 | 东北大学 | 一种微压高过载传感器芯片 |
-
2018
- 2018-07-27 JP JP2018141768A patent/JP2020016619A/ja active Pending
-
2019
- 2019-07-03 KR KR1020190079930A patent/KR102234831B1/ko not_active Expired - Fee Related
- 2019-07-24 CN CN201910670884.4A patent/CN110779638A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5178016A (en) * | 1989-11-15 | 1993-01-12 | Sensym, Incorporated | Silicon pressure sensor chip with a shear element on a sculptured diaphragm |
| JPH07140027A (ja) * | 1993-11-18 | 1995-06-02 | Fujikura Ltd | 半導体圧力センサ |
| JP2002071492A (ja) * | 2000-08-31 | 2002-03-08 | Sony Corp | 圧力センサデバイス及び信号処理装置 |
| JP2005069736A (ja) * | 2003-08-20 | 2005-03-17 | Yamatake Corp | 圧力センサ装置 |
| JP2008039760A (ja) * | 2006-07-14 | 2008-02-21 | Denso Corp | 圧力センサ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112444338A (zh) * | 2019-09-05 | 2021-03-05 | 三美电机株式会社 | 压力感测元件以及压力传感器 |
| JP2021039042A (ja) * | 2019-09-05 | 2021-03-11 | ミツミ電機株式会社 | 圧力感知素子及び圧力センサ |
| JP7352076B2 (ja) | 2019-09-05 | 2023-09-28 | ミツミ電機株式会社 | 圧力感知素子及び圧力センサ |
| WO2024218902A1 (ja) * | 2023-04-19 | 2024-10-24 | 三菱電機株式会社 | 半導体圧力センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102234831B1 (ko) | 2021-04-01 |
| CN110779638A (zh) | 2020-02-11 |
| KR20200012728A (ko) | 2020-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9764947B2 (en) | Piezoresistive pressure sensor device | |
| US7395718B2 (en) | Reliable piezo-resistive pressure sensor | |
| US7997142B2 (en) | Low pressure sensor device with high accuracy and high sensitivity | |
| US11137299B2 (en) | Multi-axial force sensor including piezoresistive groups, method of manufacturing the multi-axial force sensor, and method for operating the multi-axial force sensor | |
| JP2020016619A (ja) | 圧力センサ | |
| US8671765B2 (en) | Pressure sensor having a diaphragm | |
| US9651441B2 (en) | Pressure sensor device with high sensitivity and high accuracy | |
| CN111704104A (zh) | 用于制造mems压力传感器的方法和相应的mems压力传感器 | |
| US10156489B2 (en) | Piezoresistive pressure sensor | |
| US8522619B2 (en) | Pressure sensor | |
| US20160033349A1 (en) | Pressure sensor having cap-defined membrane | |
| JP5220866B2 (ja) | 半導体圧力センサ | |
| JP3895937B2 (ja) | 差圧・圧力センサ | |
| US10737929B2 (en) | Trench-based microelectromechanical transducer and method for manufacturing the microelectromechanical transducer | |
| US9964458B2 (en) | Pressure sensor device with anchors for die shrinkage and high sensitivity | |
| CN116068026A (zh) | 传感器元件 | |
| JP2006003100A (ja) | ピエゾ抵抗型圧力センサ | |
| JP5151281B2 (ja) | 半導体圧力センサ | |
| JP6873879B2 (ja) | センサ素子及びその製造方法 | |
| US20210072105A1 (en) | Pressure sensing element and pressure sensor | |
| JP7627998B2 (ja) | 圧力感知素子及び圧力センサ | |
| CN222460886U (zh) | 压力传感装置 | |
| US20240125658A1 (en) | Membrane of a sensor with multiple ranges | |
| JP2006064532A (ja) | 半導体加速度センサ | |
| US10408780B2 (en) | Structure of gas sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220308 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220531 |