JP2012099082A - 多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法 - Google Patents
多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法 Download PDFInfo
- Publication number
- JP2012099082A JP2012099082A JP2011000336A JP2011000336A JP2012099082A JP 2012099082 A JP2012099082 A JP 2012099082A JP 2011000336 A JP2011000336 A JP 2011000336A JP 2011000336 A JP2011000336 A JP 2011000336A JP 2012099082 A JP2012099082 A JP 2012099082A
- Authority
- JP
- Japan
- Prior art keywords
- machine
- program
- mechanism data
- sets
- machines
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001360 synchronised effect Effects 0.000 title claims abstract description 80
- 238000000034 method Methods 0.000 title claims abstract description 44
- 230000007246 mechanism Effects 0.000 claims abstract description 63
- 238000006243 chemical reaction Methods 0.000 claims abstract description 28
- 238000003754 machining Methods 0.000 claims description 24
- 238000003860 storage Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000007429 general method Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/408—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by data handling or data format, e.g. reading, buffering or conversion of data
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36242—Convert program for different machines with different M-code, G-code, header
Landscapes
- Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Numerical Control (AREA)
Abstract
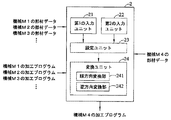
【解決手段】第1の機械と第2の機械との間でプログラムの変換を行うための多軸同期動作機械のプログラム変換モジュールであって、複数組の第1の機械の加工プログラム及びメカニズムデータが入力される第1の入力ユニットと、複数組の第2の機械のメカニズムデータが入力される第2の入力ユニットと、第1の機械のうちの少なくとも1つをソースマシンに設定するとともに、第2の機械のうちの1つをターゲットマシンに設定する設定ユニットと、ソース及びターゲットマシンのメカニズムデータに基づいて、運動学的方法を利用してソースマシンの加工プログラムをターゲットマシンに適用される加工プログラムに変換する変換ユニットと、を備える。これにより、複数台の異機種である多軸同期動作機械の間において加工プログラムの相互変換を行うことができる。
【選択図】図2
Description
12 工作機械A制御器
2、5 プログラム変換モジュール
21、51 第1の入力ユニット
22、52 第2の入力ユニット
23、53 設定ユニット
24、54 変換モジュール
241 順方向変換部
242 逆方向変換部
4 ヒューマンインタフェース
6 制御器
61 インタプリタモジュール
62 制御モジュール
71、72 多軸同期動作機械
A、B、C 回転軸
S31−S34 工程
Claims (16)
- 多軸同期動作機械に用いられ、異機種である第1の機械と第2の機械との間において加工プログラムの変換を行うためのプログラム変換モジュールであって、
複数組の前記第1の機械の加工プログラム及びメカニズムデータが入力されるための第1の入力ユニットと、
複数組の前記第2の機械のメカニズムデータが入力されるための第2の入力ユニットと、
前記複数組の第1の機械のうちの少なくとも1つをソースマシンに設定するとともに、前記複数組の第2の機械のうちの1つをターゲットマシンに設定するための設定ユニットと、
前記設定ユニットによって設定された前記ソースマシン及び前記ターゲットマシンのメカニズムデータに基づいて、運動学的方法を利用して前記ソースマシンの加工プログラムを前記ターゲットマシンに適用される加工プログラムに変換するための変換ユニットと、
を備えることを特徴とする多軸同期動作機械のプログラム変換モジュール。 - 前記第1の機械及び前記第2の機械のメカニズムデータは、GMコード、マクロ(Macro)、グローバル変数又はローカル変数、機械パラメータ又は加工プログラム領域関数(Region Function)であることを特徴とする請求項1に記載のプログラム変換モジュール。
- 前記複数組の第1の機械の加工プログラムとメカニズムデータ及び前記複数組の第2の機械のメカニズムデータを蓄積するための蓄積ユニットをさらに備えることを特徴とする請求項1に記載のプログラム変換モジュール。
- 前記複数組の第1の機械の加工プログラムは、関節座標系であることを特徴とする請求項1に記載のプログラム変換モジュール。
- 前記変換ユニットは、
前記ソースマシンのメカニズムデータに基づいて、順運動学的方法を利用して前記ソースマシンの加工プログラムを関節座標系からカルテシアン座標系に変換するための順方向変換部と、
前記ターゲットマシンに適用される加工プログラムを生成するために前記ターゲットマシンのメカニズムデータに基づいて、逆運動学的方法を利用してカルテシアン座標系に変換された前記ソースマシンの加工プログラムを関節座標系に変換するための逆方向変換部と、
を備えることを特徴とする請求項4に記載のプログラム変換モジュール。 - 前記メカニズムデータは、軸機械形式、各軸回転軸方向定義又はワークの回転軸中心からのシフト量であることを特徴とする請求項1に記載のプログラム変換モジュール。
- 前記プログラム変換モジュールは、前記設定されたターゲットマシンの制御器が前記変換ユニットによって変換された前記ターゲットマシンに適用される加工プログラムを実行するために、前記ターゲットマシンの制御器の外部に接続されることを特徴とする請求項1に記載のプログラム変換モジュール。
- 前記プログラム変換モジュールは、前記設定されたターゲットマシンの制御器が前記変換ユニットによって変換された前記ターゲットマシンに適用される加工プログラムを実行するために、前記ターゲットマシンの制御器の内部に設置されることを特徴とする請求項1に記載のプログラム変換モジュール。
- 多軸同期動作機械に用いられ、異機種である第1の機械と第2の機械との間において加工プログラムの変換を行うためのプログラム変換方法であって、
(1)複数組の前記第1の機械の加工プログラム及びメカニズムデータを入力するとともに、複数組の前記第2の機械のメカニズムデータを入力する工程と、
(2)前記複数組の第1の機械のうちの少なくとも1つをソースマシンに設定するとともに、前記複数組の第2の機械のうちの1つをターゲットマシンに設定する工程と、
(3)前記ソースマシン及び前記ターゲットマシンのメカニズムデータに基づいて、運動学的方法を利用して前記ソースマシンの加工プログラムを前記ターゲットマシンに適用される加工プログラムに変換する工程と、
を備えることを特徴とする多軸同期動作機械のプログラム変換方法。 - 前記工程(1)には、前記複数組の第1の機械の加工プログラムとメカニズムデータ及び前記複数組の第2の機械のメカニズムデータを蓄積する工程をさらに備えることを特徴とする請求項9に記載のプログラム変換方法。
- 前記複数組の第1の機械の加工プログラムは、関節座標系であることを特徴とする請求項9に記載のプログラム変換方法。
- 前記工程(3)は、
(3−1)前記ソースマシンのメカニズムデータに基づいて、順運動学的方法を利用して前記ソースマシンの加工プログラムを関節座標系からカルテシアン座標系に変換する工程と、
(3−2)前記ターゲットマシンに適用される加工プログラムを生成するために前記ターゲットマシンのメカニズムデータに基づいて、逆運動学的方法を利用してカルテシアン座標系に変換された前記ソースマシンの加工プログラムを関節座標系に変換する工程と、
を備えることを特徴とする請求項11に記載のプログラム変換方法。 - 前記メカニズムデータは、軸機械形式、各軸回転軸方向定義又はワークの回転軸中心からのシフト量であることを特徴とする請求項9に記載のプログラム変換方法。
- 前記第1の機械及び前記第2の機械のメカニズムデータの入力方法は、GMコード、マクロ(Macro)、グローバル変数又はローカル変数、機械パラメータ、加工プログラム領域関数又はヒューマンインタフェースによる入力方法を含むことを特徴とする請求項9に記載のプログラム変換方法。
- 前記ヒューマンインタフェースによって入力されたデータは、多軸機械形式、各軸回転軸方向定義又はワークの回転軸中心からのシフト量であることを特徴とする請求項14に記載のプログラム変換方法。
- 前記ヒューマンインタフェースによって入力された多軸機械形式は、5軸機械形式であることを特徴とする請求項14に記載のプログラム変換方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW099137584A TWI427448B (zh) | 2010-11-02 | 2010-11-02 | 多軸同動機械之程式轉換模組及程式轉換方法 |
| TW099137584 | 2010-11-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012099082A true JP2012099082A (ja) | 2012-05-24 |
| JP5291727B2 JP5291727B2 (ja) | 2013-09-18 |
Family
ID=45997546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011000336A Active JP5291727B2 (ja) | 2010-11-02 | 2011-01-05 | 多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8667475B2 (ja) |
| JP (1) | JP5291727B2 (ja) |
| TW (1) | TWI427448B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017016500A (ja) * | 2015-07-03 | 2017-01-19 | 村田機械株式会社 | プログラム変換装置、板材加工システム、及び板材加工方法 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5906956B2 (ja) | 2012-06-20 | 2016-04-20 | 株式会社ミツトヨ | Nc工作機械の制御方法、制御プログラム、及び制御装置 |
| US10067497B2 (en) * | 2015-05-06 | 2018-09-04 | GM Global Technology Operations LLC | System and method for implementing compensation of global and local offsets in computer controlled systems |
| JP6696465B2 (ja) * | 2017-03-16 | 2020-05-20 | 株式会社安川電機 | コントロールシステム、コントローラ及び制御方法 |
| CN107450932B (zh) * | 2017-08-16 | 2020-12-08 | 上海维宏电子科技股份有限公司 | 基于精雕机控制系统的图形选择加工系统及其方法 |
| CN109032571A (zh) * | 2018-08-28 | 2018-12-18 | 苏州艾利特机器人有限公司 | 一种机器人工艺程序生成方法 |
| US20230405810A1 (en) * | 2022-05-26 | 2023-12-21 | Rivian Ip Holdings, Llc | Modular robot control architecture |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6125212A (ja) * | 1984-07-12 | 1986-02-04 | Hitachi Seiki Co Ltd | Nc加工情報の変換機 |
| JPS63239511A (ja) * | 1987-03-27 | 1988-10-05 | Yokogawa Electric Corp | ロボツト・システム |
| JPH01226005A (ja) * | 1988-03-07 | 1989-09-08 | Matsushita Electric Ind Co Ltd | データ変換装置 |
| JPH0224704A (ja) * | 1988-07-14 | 1990-01-26 | Fanuc Ltd | ロボットプログラム変換装置 |
| JPH03277452A (ja) * | 1990-03-27 | 1991-12-09 | Mitsubishi Materials Corp | 工作機械の群管理システム |
| JPH0947990A (ja) * | 1995-08-04 | 1997-02-18 | Yaskawa Electric Corp | 産業用ロボット及びその制御装置 |
| JP2000099123A (ja) * | 1998-09-22 | 2000-04-07 | Matsushita Electric Ind Co Ltd | 産業用ロボット |
| JP2009211369A (ja) * | 2008-03-04 | 2009-09-17 | Jtekt Corp | 数値制御機械の動作シミュレータ |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5453933A (en) * | 1993-09-08 | 1995-09-26 | Hurco Companies, Inc. | CNC control system |
| US7024666B1 (en) * | 2002-01-28 | 2006-04-04 | Roy-G-Biv Corporation | Motion control systems and methods |
| IL118804A0 (en) * | 1996-07-05 | 1996-10-31 | Orbot Instr Ltd | Data converter apparatus and method particularly useful for a database-to-object inspection system |
| JPH10177406A (ja) | 1996-12-17 | 1998-06-30 | Fanuc Ltd | 5軸加工機の制御装置 |
| US5828574A (en) * | 1997-05-19 | 1998-10-27 | General Electric Company | Adaptive feedrates from geometry modeling for NC machining |
| CA2389183C (en) * | 1999-10-27 | 2008-05-20 | Roy-G-Biv Corporation | Systems and methods for generating and communicating motion data through a distributed network |
| JP4291482B2 (ja) | 1999-12-15 | 2009-07-08 | 株式会社安川電機 | 複数種類の工作機械に適用可能な座標変換部を持つ数値制御装置 |
| JP2003044109A (ja) | 2001-07-27 | 2003-02-14 | Yaskawa Electric Corp | ワ−ク座標系設定手段を持つ多軸工作機械の数値制御装置 |
| US20030158622A1 (en) | 2002-02-21 | 2003-08-21 | Corey Gary John | Multi-axes tool compensation: 3D and 5-axis real-time interactive tool compensation inside the CNC machine tool controller |
| JP4112433B2 (ja) | 2003-05-22 | 2008-07-02 | スター精密株式会社 | 工作機械の数値制御装置と工作機械の数値制御方法 |
| JP2005305579A (ja) | 2004-04-20 | 2005-11-04 | Makino Milling Mach Co Ltd | Nc工作機械の制御方法及び制御装置 |
| US7571027B2 (en) | 2005-05-31 | 2009-08-04 | The Boeing Company | Kinematic singular point compensation systems and methods |
| JP2007179314A (ja) * | 2005-12-28 | 2007-07-12 | Star Micronics Co Ltd | 工作機械及びそのプログラム変換方法 |
| TW200805017A (en) | 2006-07-04 | 2008-01-16 | Top Work Industry Co Ltd | Human-machine interface for a multi-axis lathe controller. |
| TWI329246B (en) * | 2007-03-23 | 2010-08-21 | Univ Chung Yuan Christian | Measuring method and system for cnc machine |
| JP2008287471A (ja) | 2007-05-17 | 2008-11-27 | Fanuc Ltd | 5軸加工機の数値制御方法 |
| JP4351281B2 (ja) | 2007-12-13 | 2009-10-28 | ファナック株式会社 | 5軸加工機を制御する数値制御装置 |
| JP4406034B2 (ja) | 2008-03-07 | 2010-01-27 | ファナック株式会社 | 5軸加工機を制御する数値制御装置 |
| US8392002B2 (en) * | 2010-10-14 | 2013-03-05 | Delta Tau Data Systems, Inc. | Hybrid machine control incorporating fast-tool servos |
-
2010
- 2010-11-02 TW TW099137584A patent/TWI427448B/zh active
- 2010-12-20 US US12/972,812 patent/US8667475B2/en active Active
-
2011
- 2011-01-05 JP JP2011000336A patent/JP5291727B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6125212A (ja) * | 1984-07-12 | 1986-02-04 | Hitachi Seiki Co Ltd | Nc加工情報の変換機 |
| JPS63239511A (ja) * | 1987-03-27 | 1988-10-05 | Yokogawa Electric Corp | ロボツト・システム |
| JPH01226005A (ja) * | 1988-03-07 | 1989-09-08 | Matsushita Electric Ind Co Ltd | データ変換装置 |
| JPH0224704A (ja) * | 1988-07-14 | 1990-01-26 | Fanuc Ltd | ロボットプログラム変換装置 |
| JPH03277452A (ja) * | 1990-03-27 | 1991-12-09 | Mitsubishi Materials Corp | 工作機械の群管理システム |
| JPH0947990A (ja) * | 1995-08-04 | 1997-02-18 | Yaskawa Electric Corp | 産業用ロボット及びその制御装置 |
| JP2000099123A (ja) * | 1998-09-22 | 2000-04-07 | Matsushita Electric Ind Co Ltd | 産業用ロボット |
| JP2009211369A (ja) * | 2008-03-04 | 2009-09-17 | Jtekt Corp | 数値制御機械の動作シミュレータ |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017016500A (ja) * | 2015-07-03 | 2017-01-19 | 村田機械株式会社 | プログラム変換装置、板材加工システム、及び板材加工方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW201220009A (en) | 2012-05-16 |
| TWI427448B (zh) | 2014-02-21 |
| US8667475B2 (en) | 2014-03-04 |
| JP5291727B2 (ja) | 2013-09-18 |
| US20120109361A1 (en) | 2012-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5291727B2 (ja) | 多軸同期動作機械のプログラム変換モジュール及びプログラム変換方法 | |
| Martinov et al. | From classic CNC systems to cloud-based technology and back | |
| Grigoriev et al. | Research and development of a cross-platform CNC kernel for multi-axis machine tool | |
| Xiao et al. | A complete CAD/CAM/CNC solution for STEP-compliant manufacturing | |
| Minhat et al. | A novel open CNC architecture based on STEP-NC data model and IEC 61499 function blocks | |
| CN106502095B (zh) | 一种多工业机器人的协同控制方法 | |
| Braumann et al. | Parametric robot control | |
| Grigoriev et al. | Scalable open cross-platform kernel of PCNC system for multi-axis machine tool | |
| Ramesh et al. | Intelligent automation of design and manufacturing in machine tools using an open architecture motion controller | |
| GB2473129A (en) | Off-line robot teaching method | |
| CN104786221A (zh) | 一种基于以太网的开放式机械手控制方法 | |
| Nagata et al. | Development of CAM system based on industrial robotic servo controller without using robot language | |
| CN105573253A (zh) | 一种工业机器人群控系统及方法 | |
| US9342068B2 (en) | Motion controller and motor control system | |
| Yao et al. | Design of a machine tool control system for function reconfiguration and reuse in network environment | |
| CN101673104A (zh) | 基于g代码转换方法的工业机器人加工控制方法 | |
| CN104133400A (zh) | 一种基于数字总线的转盘磨刀机嵌入式控制器 | |
| Song et al. | Research on multi-robot open architecture of an intelligent CNC system based on parameter-driven technology | |
| Rea Minango et al. | Combining the STEP-NC standard and forward and inverse kinematics methods for generating manufacturing tool paths for serial and hybrid robots | |
| US7346478B2 (en) | Method of embedding tooling control data within mechanical fixture design to enable programmable logic control verification simulation | |
| CN107710082A (zh) | 用于控制和/或调节机器人系统的外部控制系统的自动配置方法 | |
| WO2017101700A1 (zh) | 与数控系统直接通讯的计算机辅助制造方法及装置和系统 | |
| CN107272614A (zh) | 一种教学加工型智能制造集成装置的控制系统 | |
| Solvang et al. | Shop-floor architecture for effective human-machine and inter-machine interaction | |
| Solvang et al. | STEP-NC based industrial robot CAM system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130508 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130607 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5291727 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |