CN116419162A - Non-networked UAV tracking and monitoring method and system based on new generation core network - Google Patents
Non-networked UAV tracking and monitoring method and system based on new generation core network Download PDFInfo
- Publication number
- CN116419162A CN116419162A CN202310419867.XA CN202310419867A CN116419162A CN 116419162 A CN116419162 A CN 116419162A CN 202310419867 A CN202310419867 A CN 202310419867A CN 116419162 A CN116419162 A CN 116419162A
- Authority
- CN
- China
- Prior art keywords
- information
- unmanned aerial
- monitoring
- aerial vehicle
- core network
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/181—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a plurality of remote sources
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/025—Services making use of location information using location based information parameters
- H04W4/027—Services making use of location information using location based information parameters using movement velocity, acceleration information
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02D—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN INFORMATION AND COMMUNICATION TECHNOLOGIES [ICT], I.E. INFORMATION AND COMMUNICATION TECHNOLOGIES AIMING AT THE REDUCTION OF THEIR OWN ENERGY USE
- Y02D30/00—Reducing energy consumption in communication networks
- Y02D30/70—Reducing energy consumption in communication networks in wireless communication networks
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computational Linguistics (AREA)
- Molecular Biology (AREA)
- Artificial Intelligence (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Health & Medical Sciences (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Multimedia (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
本发明公开了一种基于新一代通信网的非联网无人机跟踪监控方法及系统,该方法包括:核心网根据所要监测无人机执行任务的基本信息生成与所要监测无人机相对应的通信小区信息;根据通信小区信息,确定与各个途经点相对应的目标基站;各个目标基站将获得的监测信息反馈给核心网;核心网对监测信息进行处理,以获得与当前监测信息相对应的无人机的身份信息;当预测到的无人机的身份信息与基本信息相匹配时,将与该监测信息相对应的无人机的位置、飞行高度、飞行速度以及监测到的时间信息反馈给用户终端。根据上述方法,可根据用户所指定的非联网无人机的机型,为用户反馈相对应的跟踪监控信息,以有效降低私有用户的非联网无人机的跟踪监控成本。
The invention discloses a method and system for tracking and monitoring a non-networked UAV based on a new generation of communication network. Communication cell information; according to the communication cell information, determine the target base station corresponding to each passing point; each target base station will feed back the obtained monitoring information to the core network; the core network processes the monitoring information to obtain the current monitoring information corresponding to The identity information of the drone; when the predicted identity information of the drone matches the basic information, the position, flight altitude, flight speed and monitored time information of the drone corresponding to the monitoring information will be fed back to the user terminal. According to the above method, according to the model of the unnetworked UAV specified by the user, corresponding tracking and monitoring information can be fed back to the user, so as to effectively reduce the tracking and monitoring cost of the non-networked UAV for private users.
Description
技术领域technical field
本发明涉及无人机监控技术领域,尤其涉及一种基于新一代核心网的非联网无人机跟踪监控方法及系统。The invention relates to the technical field of unmanned aerial vehicle monitoring, in particular to a method and system for tracking and monitoring unnetworked unmanned aerial vehicles based on a new generation core network.
背景技术Background technique
随着5G网络的普及,5G网络与无人机技术的融合,给无人机的应用带来了新的机遇,极大丰富了无人机的应用领域和服务场景,例如农业、电力、水利、交通、公安、消防等,为大众的生活带来了新的变化。对于具有网络通信能力的无人机来说,可以直接利用当前广泛覆盖的蜂窝网络跟踪其飞行路线,以确保无人机顺利完成任务以及飞行过程中的安全性。With the popularization of 5G network, the integration of 5G network and drone technology has brought new opportunities to the application of drones, greatly enriching the application fields and service scenarios of drones, such as agriculture, electric power, water conservancy , transportation, public security, fire protection, etc., have brought new changes to the lives of the public. For UAVs with network communication capabilities, the current wide-coverage cellular network can be directly used to track their flight routes to ensure the UAVs can successfully complete their missions and be safe during flight.
然而,如今市面上仍有一些缺乏网络连接能力的无人机或执行任务过程中无需联网进行数据传输的无人机。使用此类无人机执行任务时,若无法对其飞行路线进行跟踪,可能存在一定的安全隐患。However, there are still some drones on the market that lack internet connectivity or drones that do not need to be connected to the Internet for data transmission during missions. When using such drones to perform missions, if the flight path cannot be tracked, there may be certain security risks.
对此,现如今,基于5G通信感知一体化技术,利用5G基站海量部署优势,实现了通过5G基站进行低空无人机的有效探测,该技术相比传统无人机探测技术有大范围连续覆盖、低成本、易部署等多方面优势,可为低空监管部门提供有效监控手段,探测半径达到1000米以上。In this regard, nowadays, based on the 5G communication perception integration technology, taking advantage of the mass deployment of 5G base stations, the effective detection of low-altitude drones through 5G base stations has been realized. Compared with traditional drone detection technology, this technology has a large-scale continuous coverage. , low cost, easy deployment and many other advantages, it can provide effective monitoring means for low-altitude supervision departments, and the detection radius can reach more than 1000 meters.
然而,现有技术中基于5G基站对无人机进行监控的方式,只能监控到基站通信服务范围内是否具有无人机,而无法获取无人机的机型。因此,对于无人机系统服务提供商来说,也就无法根据5G基站跟踪监控自家的非联网无人机的飞行状态,只能通过其它高成本的监控方式进行跟踪。However, in the prior art, the method of monitoring drones based on 5G base stations can only monitor whether there are drones within the communication service range of the base station, but cannot obtain the model of the drone. Therefore, for drone system service providers, it is impossible to track and monitor the flight status of their own non-networked drones based on 5G base stations, and can only track them through other high-cost monitoring methods.
发明内容Contents of the invention
本发明的目的是提供一种基于通信基站对非联网无人机的飞行状态进行跟踪监控且可自动获知所监控到的无人机的身份的基于新一代核心网的非联网无人机跟踪监控方法及系统。The purpose of the present invention is to provide a new generation of core network-based non-networked UAV tracking and monitoring based on the communication base station to track and monitor the flight status of the non-networked UAV and automatically know the identity of the monitored UAV methods and systems.
为了实现上述目的,本发明公开了一种基于新一代通信网的非联网无人机跟踪监控方法,所述通信网包括核心网和与所述核心网通信连接的基站,所述跟踪监控方法包括:In order to achieve the above object, the present invention discloses a new-generation communication network-based non-networked UAV tracking and monitoring method, the communication network includes a core network and a base station communicatively connected to the core network, and the tracking and monitoring method includes :
核心网根据所要监测无人机执行任务的基本信息生成与所要监测无人机相对应的通信小区信息;The core network generates communication cell information corresponding to the UAV to be monitored based on the basic information of the UAV to be monitored;
根据所述通信小区信息,确定与各个途经点相对应的目标基站,所述目标基站上设置有监控摄像装置;According to the communication cell information, determine the target base station corresponding to each passing point, and the target base station is provided with a monitoring camera device;
各个所述目标基站将获得的监测信息反馈给所述核心网,所述监测信息包括无人机的位置、飞行高度、飞行速度以及照片;Each of the target base stations feeds back the obtained monitoring information to the core network, and the monitoring information includes the position, flight height, flight speed and photos of the drone;
所述核心网基于预设的预测模型对所述监测信息进行处理,以获得与当前所述监测信息相对应的无人机的身份信息;The core network processes the monitoring information based on a preset prediction model to obtain the identity information of the UAV corresponding to the current monitoring information;
当预测到的无人机的身份信息与所述基本信息相匹配时,将与该监测信息相对应的无人机的位置、飞行高度、飞行速度以及监测到的时间信息反馈给用户终端。When the predicted identity information of the UAV matches the basic information, the UAV's position, flight altitude, flight speed and monitored time information corresponding to the monitoring information are fed back to the user terminal.
较佳地,所述通信小区信息的生成方法包括:Preferably, the method for generating the communication cell information includes:
所述核心网通过所述用户终端接收所述基本信息;The core network receives the basic information through the user terminal;
将所述区域范围和预期飞行路线中的途经点映射到通信网络中,以生成所述通信小区信息。Mapping the area range and the via points in the expected flight path to a communication network to generate the communication cell information.
较佳地,所述基本信息还包括所检测无人机执行任务的开始时间、预期飞行路线中的途径点、飞行速度以及飞行高度;所述区域范围包括该执行任务所覆盖的地理区域以及各个途经点之间的距离;Preferably, the basic information also includes the start time of the detected UAV mission, the way points in the expected flight route, the flight speed and the flight altitude; the area range includes the geographical area covered by the mission and each the distance between the passing points;
所述核心网还根据执行任务的区域范围、开始时间、途径点、飞行速度,估算所述无人机到达各个途径点的时间段;The core network also estimates the time period for the UAV to reach each way point according to the area range, start time, way point, and flight speed of the task;
所述目标基站根据所述时间段信息定时进入监控状态,以获得所述监测信息。The target base station regularly enters a monitoring state according to the time period information, so as to obtain the monitoring information.
较佳地,所述预测模型基于智能神经网络模型构建。Preferably, the prediction model is constructed based on an intelligent neural network model.
本发明还公开一种基于新一代核心网的非联网无人机跟踪监控系统,所述通信网包括核心网和与所述核心网通信连接的基站,所述跟踪监控系统包括设置于所述核心网中的小区生成模块、基站定位模块、分析处理模块、判断模块以及反馈模块;The present invention also discloses a new-generation core network-based non-networking UAV tracking and monitoring system. The communication network includes a core network and a base station communicatively connected to the core network. The tracking and monitoring system includes Cell generation module, base station positioning module, analysis and processing module, judgment module and feedback module in the network;
所述小区生成模块,用于根据所要监测无人机执行任务的基本信息生成与所要监测无人机相对应的通信小区信息;所述基本信息包括无人机的身份以及执行任务的区域范围和预期飞行路线中的途径点;The cell generation module is used to generate communication cell information corresponding to the UAV to be monitored according to the basic information of the UAV to be monitored; the basic information includes the identity of the UAV and the area range and Waypoints in the intended flight path;
所述基站定位模块,用于根据所述通信小区信息,确定与各个途经点相对应的目标基站,所述目标基站上设置有摄像装置;The base station positioning module is used to determine the target base station corresponding to each passing point according to the communication cell information, and the target base station is provided with a camera device;
所述分析处理模块,用于基于预设的预测模型对所述目标基站反馈的监测信息进行处理,以获得与当前所述监测信息相对应的无人机的身份信息;所述监测信息包括无人机的位置、飞行高度、飞行速度以及图像;The analysis and processing module is configured to process the monitoring information fed back by the target base station based on a preset prediction model, so as to obtain the identity information of the UAV corresponding to the current monitoring information; the monitoring information includes The position, flight altitude, flight speed and image of the man-machine;
所述判断模块,用于判断所述分析处理模块预测到的无人机的身份信息与所述基本信息是否匹配;The judging module is used to judge whether the identity information of the drone predicted by the analyzing and processing module matches the basic information;
所述反馈模块,用于当所述判断模块的判断结果为是时,将与该监测信息相对应的无人机的位置、飞行高度、飞行速度以及监测到的时间信息反馈给用户终端。The feedback module is configured to feed back the position, flight height, flight speed and monitored time information of the drone corresponding to the monitoring information to the user terminal when the judgment result of the judgment module is yes.
较佳地,所述小区生成模块将所述区域范围和预期飞行路线中的途经点映射到通信网络中,以生成所述通信小区信息。Preferably, the cell generating module maps the area range and the passing points in the expected flight route to a communication network to generate the communication cell information.
较佳地,所述基本信息还包括所检测无人机执行任务的开始时间、预期飞行路线中的途径点、飞行速度以及飞行高度;所述区域范围包括该执行任务所覆盖的地理区域以及各个途经点之间的距离;Preferably, the basic information also includes the start time of the detected UAV mission, the way points in the expected flight route, the flight speed and the flight altitude; the area range includes the geographical area covered by the mission and each the distance between the passing points;
所述核心网中还设置有时间估算模块,所述时间估算模块用于根据执行任务的区域范围、开始时间、途径点、飞行速度,估算所述无人机到达各个途径点的时间段;The core network is also provided with a time estimation module, and the time estimation module is used to estimate the time period for the drone to reach each way point according to the area range, start time, way points, and flight speed of the task;
所述目标基站根据所述时间段信息定时进入监控状态,以获得所述监测信息。The target base station regularly enters a monitoring state according to the time period information, so as to obtain the monitoring information.
较佳地,所述预测模型基于智能神经网络模型构建。Preferably, the prediction model is constructed based on an intelligent neural network model.
本发明还公开一种非联网无人机跟踪监控系统,其包括:The invention also discloses a non-networked UAV tracking and monitoring system, which includes:
一个或多个处理器;one or more processors;
存储器;memory;
以及一个或多个程序,其中一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如上所述的非联网无人机跟踪监控方法的指令。and one or more programs, wherein the one or more programs are stored in the memory and are configured to be executed by the one or more processors, the programs including for performing the non-networked wireless Instructions for human-machine tracking and monitoring methods.
本发明还公开一种计算机可读存储介质,其包括计算机程序,所述计算机程序可被处理器执行以完成如上所述的非联网无人机跟踪监控方法。The present invention also discloses a computer-readable storage medium, which includes a computer program, and the computer program can be executed by a processor to complete the above-mentioned non-networked UAV tracking and monitoring method.
与现有技术相比,本发明上述技术方案,基于新一代通信网的基站感知其通信服务范围内的无人机,且通过核心网的数据分析功能对基站获取到的监测信息进行智能分析,以获得当前所监控到的无人机的身份信息,从而可为用户提供差异化的无人机跟踪监控服务,也即,根据用户所指定的非联网无人机的机型,为用户反馈相对应的跟踪监控信息,以有效降低私有用户的非联网无人机的跟踪监控成本。Compared with the prior art, the above-mentioned technical solution of the present invention is based on the base station of the new generation communication network to sense the drones within its communication service range, and intelligently analyze the monitoring information obtained by the base station through the data analysis function of the core network, To obtain the identity information of the currently monitored UAV, so as to provide users with differentiated UAV tracking and monitoring services, that is, according to the model of the non-networked UAV specified by the user, provide the user with relevant feedback. Corresponding tracking and monitoring information to effectively reduce the tracking and monitoring costs of non-networked UAVs for private users.
附图说明Description of drawings
图1为本发明实施例中非联网无人机跟踪监控方法流程图。FIG. 1 is a flowchart of a method for tracking and monitoring a non-networked UAV in an embodiment of the present invention.
图2为本发明实施例中非联网无人机跟踪监控方法在核心网中的执行流程图。Fig. 2 is a flow chart of execution in the core network of the non-networked UAV tracking and monitoring method in the embodiment of the present invention.
具体实施方式Detailed ways
为详细说明本发明的技术内容、构造特征、所实现目的及效果,以下结合实施方式并配合附图详予说明。In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
本实施例公开了一种基于新一代通信网的非联网无人机跟踪监控方法,以用于基于通信基站对低空飞行的无人机进行跟踪监控,且自动分析出所监控到的无人机的机型。本实施例中的新一代通信网包括5GS系统以及兼容5GS系统的下一代通信系统。以5GS系统为例,其包括核心网和与核心网通信连接的基站。This embodiment discloses a method for tracking and monitoring non-networked UAVs based on a new generation of communication network, which is used to track and monitor low-altitude UAVs based on communication base stations, and automatically analyze the monitored UAVs. model. The new generation communication network in this embodiment includes the 5GS system and the next generation communication system compatible with the 5GS system. Taking the 5GS system as an example, it includes a core network and a base station communicating with the core network.
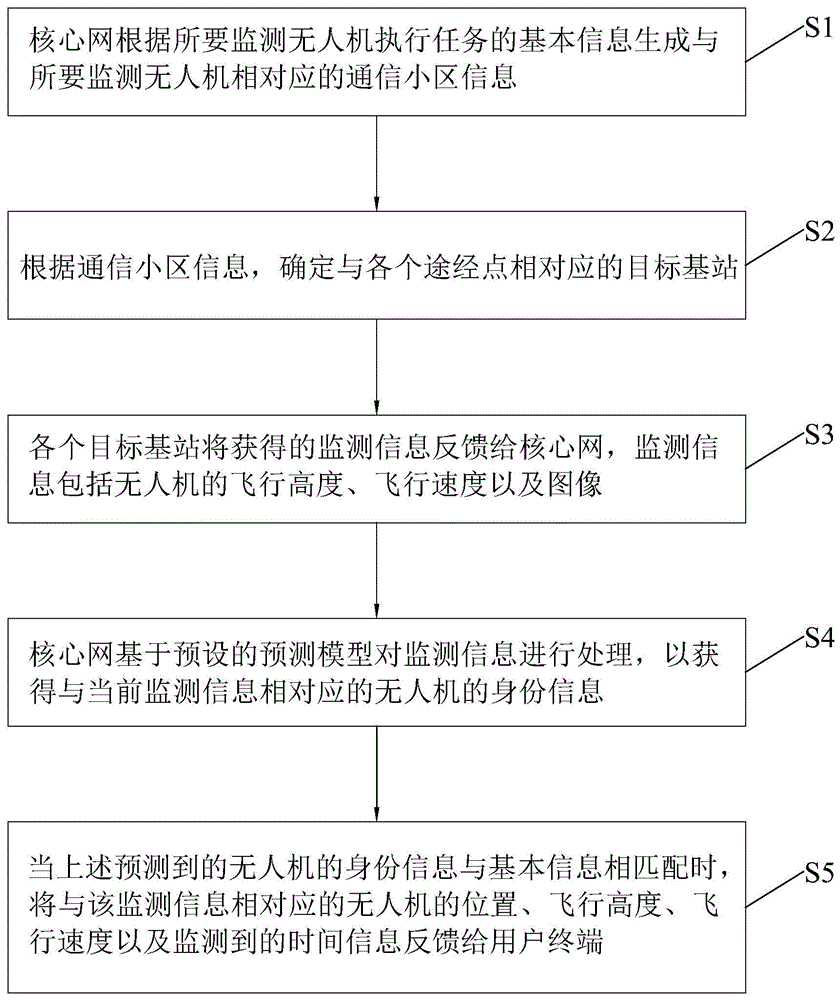
如图1,本实施例中的跟踪监控方法包括如下步骤:As shown in Figure 1, the tracking and monitoring method in the present embodiment includes the following steps:
S1:核心网根据所要监测无人机执行任务的基本信息生成与所要监测无人机相对应的通信小区信息,该基本信息包括无人机的身份以及执行任务的区域范围和预期飞行路线中的途径点;S1: The core network generates communication cell information corresponding to the UAV to be monitored based on the basic information of the UAV to be monitored. way point;
S2:根据通信小区信息,确定与各个途经点相对应的目标基站,目标基站上设置有摄像装置,该摄像装置用于拍摄基站通信服务范围内的无人机的图像;S2: According to the communication cell information, determine the target base station corresponding to each passing point, the target base station is provided with a camera device, and the camera device is used to take images of drones within the communication service range of the base station;
S3:各个目标基站将获得的监测信息反馈给核心网,监测信息包括无人机的位置、飞行高度、飞行速度以及图像;S3: Each target base station feeds back the obtained monitoring information to the core network. The monitoring information includes the position, flight altitude, flight speed and image of the drone;
S4:核心网基于预设的预测模型对监测信息进行处理,以获得与当前监测信息相对应的无人机的身份信息;S4: The core network processes the monitoring information based on the preset prediction model to obtain the identity information of the UAV corresponding to the current monitoring information;
S5:当上述步骤S4中预测到的无人机的身份信息与基本信息相匹配时,将与该监测信息相对应的无人机的位置、飞行高度、飞行速度以及监测到的时间信息反馈给用户终端。由于无人机处于运动过程中,本实施例中无人机的位置指的是目标基站感应到无人机那一刻所对应的位置。S5: When the identity information of the UAV predicted in the above step S4 matches the basic information, feed back the position, flight altitude, flight speed and monitored time information of the UAV corresponding to the monitoring information to user terminal. Since the drone is in motion, the position of the drone in this embodiment refers to the corresponding position at the moment when the target base station senses the drone.
基于上述结构的跟踪监控方法,基于5G基站感知其通信服务范围内的无人机,且通过核心网的数据分析功能对基站获取到的监测信息进行智能分析,以获得当前所监控到的无人机的身份信息,从而可为用户提供差异化的非联网无人机跟踪监控服务,也即,根据用户所指定的无人机的机型,为用户反馈相对应的跟踪监控信息,以有效降低私有用户的非联网无人机的跟踪监控成本。The tracking and monitoring method based on the above structure is based on the perception of unmanned aerial vehicles within its communication service range based on the 5G base station, and intelligently analyzes the monitoring information obtained by the base station through the data analysis function of the core network to obtain the currently monitored unmanned aerial vehicles. The identity information of the drone can provide users with differentiated tracking and monitoring services for non-networked drones, that is, according to the model of the drone specified by the user, the corresponding tracking and monitoring information will be fed back to the user to effectively reduce the Tracking and monitoring costs of non-networked drones for private users.
具体地,通信小区信息的生成方法包括:Specifically, the method for generating communication cell information includes:
核心网通过用户终端接收基本信息;The core network receives basic information through the user terminal;
将区域范围和预期飞行路线中的途经点映射到通信网络中,以生成通信小区信息。本实施例中的通信小区为通信服务区域的基本单位。在通信服务网络中,基站包含小区,小区包含扇区。一个基站可以是360度的全向小区,也可分为多个小区。Area ranges and via points in the intended flight path are mapped into the communication network to generate communication cell information. The communication cell in this embodiment is the basic unit of the communication service area. In a communication service network, a base station includes a cell, and a cell includes a sector. A base station can be a 360-degree omni-directional cell, or it can be divided into multiple cells.
进一步地,基本信息还包括所检测无人机执行任务的开始时间、预期飞行路线中的途径点、飞行速度以及飞行高度等信息。本实施例中的区域范围包括该执行任务所覆盖的地理区域以及各个途经点之间的距离。Further, the basic information also includes information such as the start time of the detected drone's mission, the waypoints in the expected flight route, the flight speed, and the flight altitude. The area range in this embodiment includes the geographic area covered by the execution task and the distance between various passing points.
对此,核心网还根据执行任务的区域范围、开始时间、途径点、飞行速度等信息,估算无人机到达各个途径点的时间段。目标基站根据该时间段信息定时进入监控状态,以获得监测信息。在本实施例中,核心网对目标基站发出监测请求时,同时把估算出的时间段信息发送给相应的目标基站,目标基站根据该时间段信息定时对其服务范围内的低空环境进行无人机的监测,因此,可有效降低目标基站的能耗。另外,当基站在核心网发送的定时时间段范围内未监测到无人机时,核心网向用户终端反馈异常报告信息。In this regard, the core network also estimates the time period for the drone to reach each way point based on information such as the area where the mission is performed, the start time, the way point, and the flight speed. The target base station regularly enters the monitoring state according to the time period information to obtain monitoring information. In this embodiment, when the core network sends a monitoring request to the target base station, the estimated time period information is sent to the corresponding target base station at the same time, and the target base station regularly monitors the low-altitude environment within its service range according to the time period information. Therefore, it can effectively reduce the energy consumption of the target base station. In addition, when the base station does not monitor the UAV within the timing period sent by the core network, the core network feeds back abnormal report information to the user terminal.
更进一步地,预测模型基于智能神经网络模型构建。对于该预测模型,基于海量数据集进行训练,以无人机的位置、飞行高度、飞行速度、无人机的照片或视频等信息作为特征指标,以无人机的机型作为标签,构成监督数据,经由机器学习算法进行训练,并选取不同的模型评价指标对模型效果进行评估,以得到性能优异的模型。Furthermore, the prediction model is built based on the intelligent neural network model. For this predictive model, it is trained based on a massive data set, with the UAV's position, flight height, flight speed, UAV's photo or video and other information as feature indicators, and the UAV's model as a label to form a supervisory model. The data is trained by machine learning algorithms, and different model evaluation indicators are selected to evaluate the model effect to obtain a model with excellent performance.
如图2,上述实施例提供的对非联网无人机的跟踪监控方法的执行流程如下:As shown in Figure 2, the implementation process of the tracking and monitoring method for non-networked drones provided by the above-mentioned embodiment is as follows:
01.无人机系统服务提供商(USS)向核心网中的网络功能NF发起事件报告请求,该请求消息中包括事件ID(非联网无人机路线跟踪)、报告条件(监测到无人机时进行状态上报、在预期到达途经点的时间段内未监测到无人机进行异常状态上报)、对于所要监控的无人机的机型ID、型号、执行任务的开始时间、预期飞行路线的途经点、飞行速度、飞行高度、区域范围等信息;01. The UAV system service provider (USS) initiates an event report request to the network function NF in the core network. The request message includes the event ID (non-networked UAV route tracking), report condition (monitored UAV Report the status when it is expected to arrive at the passing point, and report the abnormal status of the drone if it is not detected within the time period expected to arrive at the passing point), for the model ID, model, start time of the mission, and expected flight route of the drone to be monitored Passing point, flight speed, flight altitude, area range and other information;
02.NF授权USS的请求;02. NF authorizes the request of USS;
03.NF响应USS;03. NF responds to USS;
04.NF根据无人机预期飞行路线的区域范围、途径点信息,映射成通信小区信息,并根据无人机执行任务的开始时间、飞行速度、区域范围估算无人机到达各途经点的时间段信息,然后将上述信息(通信小区信息、预计到达各途经点的时间段信息以及步骤01中USS发起的请求中的信息)转发至网络数据分析功能NWDAF;04. NF maps the information of the area and way points of the expected flight route of the UAV into communication cell information, and estimates the time when the UAV arrives at each way point based on the start time, flight speed, and area range of the UAV's mission. segment information, and then forward the above information (communication cell information, time segment information expected to arrive at each passing point, and information in the request initiated by the USS in step 01) to the network data analysis function NWDAF;
05.NWDAF向接入和移动性管理功能AMF发起监测请求,该监测请求消息中包括监测事件ID、无人机的机械、型号、通信小区、预计到达各途经点的时间段信息等;05. NWDAF initiates a monitoring request to the access and mobility management function AMF, and the monitoring request message includes the monitoring event ID, the drone’s machine, model, communication cell, and the expected arrival time at each passing point, etc.;
06.AMF根据监测请求中的通信小区信息确定各途经点的RAN(目标基站),并将监测请求转发给各个RAN,RAN接收到的监测请求消息中包括监测事件ID、无人机预计到达该RAN服务范围的时间段信息;06. AMF determines the RAN (target base station) of each passing point according to the communication cell information in the monitoring request, and forwards the monitoring request to each RAN. The monitoring request message received by the RAN includes the monitoring event ID, the UAV’s expected arrival at the Time period information of RAN service scope;
07.RANs响应AMF;07. RANs respond to AMF;
08.AMF响应NWDAF;08. AMF responds to NWDAF;
09.NWDAF响应NF;09. NWDAF responds to NF;
10.各RAN在其服务范围内基于无线信号对无人机进行监测,当RAN在预计到达该RAN服务范围的时间段内监测到无人机时,RAN将监测到的UAV信息上报给AMF,监测信息包括无人机的位置、飞行高度、飞行速度以及照片或视频;当RAN在预计到达该RAN服务范围的时间段内未监测到无人机时,RAN进行异常信息上报;10. Each RAN monitors the UAV based on wireless signals within its service area. When the RAN monitors the UAV within the expected time period of reaching the RAN service area, the RAN reports the monitored UAV information to the AMF. The monitoring information includes the UAV's position, flight altitude, flight speed, and photos or videos; when the RAN does not monitor the UAV within the time period expected to reach the RAN's service range, the RAN will report the abnormal information;
11.AMF将RAN上报的监测信息/异常信息转发至NWDAF;11. AMF forwards the monitoring information/abnormal information reported by RAN to NWDAF;
12.NWDAF通过内置的预先训练好的预测模型对监测信息进行分析,输出无人机的机型,并将该无人机的机型与USS提供的请求信息进行匹配,以判断该无人机是否是USS要求监控的目标。12. NWDAF analyzes the monitoring information through the built-in pre-trained prediction model, outputs the model of the drone, and matches the model of the drone with the request information provided by the USS to judge the drone. Whether it is the target that USS requires monitoring.
13.NWDAF将分析结果发送给NF,若分析结果表明监测到的无人机为USS服务请求中的U无人机,则进行无人机状态信息报告,报告信息包括无人机的位置、飞行高度、飞行速度、监测到该无人机的时间等;若分析结果为否,或者NWDAF在步骤11中接收到异常信息时,则进行异常状态上报;13. NWDAF sends the analysis results to the NF. If the analysis results show that the monitored UAV is the U UAV in the USS service request, it will report the status information of the UAV. The report information includes the UAV’s position, flight Altitude, flight speed, time when the UAV was detected, etc.; if the analysis result is no, or when NWDAF receives abnormal information in step 11, it will report the abnormal status;
14.NF将分析结果转发至USS。14. The NF forwards the analysis results to the USS.
根据上述服务流程,USS可以在5GS的帮助下获取非联网无人机执行任务过程中的飞行路线跟踪信息以及异常信息,从而根据信息上报结果做出决策调整。According to the above service process, with the help of 5GS, USS can obtain flight route tracking information and abnormal information during the mission execution process of non-networked drones, so as to make decision-making adjustments based on the information reported results.
本发明还公开一种基于新一代核心网的非联网无人机跟踪监控系统,所述通信网包括核心网和与所述核心网通信连接的基站,该跟踪监控系统包括设置于所述核心网中的小区生成模块、基站定位模块、分析处理模块、判断模块以及反馈模块。The present invention also discloses a new-generation core network-based non-networked UAV tracking and monitoring system. The communication network includes a core network and a base station communicatively connected to the core network. The tracking and monitoring system includes The cell generation module, the base station positioning module, the analysis and processing module, the judgment module and the feedback module in the system.
所述小区生成模块,用于根据所要监测无人机执行任务的基本信息生成与所要监测无人机相对应的通信小区信息。所述基本信息包括无人机的身份以及执行任务的区域范围和预期飞行路线中的途径点。The cell generation module is used to generate communication cell information corresponding to the UAV to be monitored according to the basic information of the mission performed by the UAV to be monitored. The basic information includes the identity of the drone, the range of the area where the task is performed, and the waypoints in the expected flight route.
所述基站定位模块,用于根据所述通信小区信息,确定与各个途经点相对应的目标基站,所述目标基站上设置有摄像装置。The base station positioning module is used to determine the target base station corresponding to each passing point according to the communication cell information, and the target base station is provided with a camera device.
所述分析处理模块,用于基于预设的预测模型对所述目标基站反馈的监测信息进行处理,以获得与当前所述监测信息相对应的无人机的身份信息;所述监测信息包括无人机的位置、飞行高度、飞行速度以及图像。The analysis and processing module is configured to process the monitoring information fed back by the target base station based on a preset prediction model, so as to obtain the identity information of the UAV corresponding to the current monitoring information; the monitoring information includes The position, flight altitude, flight speed and image of the man-machine.
所述判断模块,用于判断所述分析处理模块预测到的无人机的身份信息与所述基本信息是否匹配。The judging module is used to judge whether the identity information of the UAV predicted by the analyzing and processing module matches the basic information.
所述反馈模块,用于当所述判断模块的判断结果为是时,将与该监测信息相对应的无人机的位置、飞行高度、飞行速度以及监测到的时间信息反馈给用户终端。The feedback module is configured to feed back the position, flight height, flight speed and monitored time information of the drone corresponding to the monitoring information to the user terminal when the judgment result of the judgment module is yes.
进一步地,所述小区生成模块将所述区域范围和预期飞行路线中的途经点映射到通信网络中,以生成所述通信小区信息。Further, the cell generating module maps the area range and the passing points in the expected flight route to a communication network, so as to generate the communication cell information.
进一步地,所述基本信息还包括所检测无人机执行任务的开始时间、预期飞行路线中的途径点、飞行速度以及飞行高度。所述区域范围包括该执行任务所覆盖的地理区域以及各个途经点之间的距离。Further, the basic information also includes the start time of the detected drone's mission, the waypoints in the expected flight route, the flight speed and the flight altitude. The area range includes the geographical area covered by the execution task and the distance between various passing points.
所述核心网中还设置有时间估算模块,所述时间估算模块用于根据执行任务的区域范围、开始时间、途径点、飞行速度,估算所述无人机到达各个途径点的时间段。所述目标基站根据所述时间段信息定时进入监控状态,以获得所述监测信息。The core network is also provided with a time estimation module, and the time estimation module is used to estimate the time period for the UAV to reach each way point according to the area range, start time, way points, and flight speed of the task. The target base station regularly enters a monitoring state according to the time period information, so as to obtain the monitoring information.
另外需要说明的是,本实施例中非联网无人机跟踪监控系统的工作原理和工作方式详见上述非联网无人机跟踪监控方法,在此不再赘述。In addition, it should be noted that the working principle and working method of the non-networked UAV tracking and monitoring system in this embodiment are detailed in the above-mentioned non-networked UAV tracking and monitoring method, and will not be repeated here.
本发明还公开另一种非联网无人机跟踪监控系统,其包括一个或多个处理器、存储器以及一个或多个程序,其中一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行如上所述的非联网无人机跟踪监控方法的指令。处理器可以采用通用的中央处理器(Central Processing Unit,CPU),微处理器,应用专用集成电路(Application Specific Integrated Circuit,ASIC),或者一个或多个集成电路,用于执行相关程序,以实现本申请实施例的非联网无人机跟踪监控系统中的模块所需执行的功能,或者执行本申请方法实施例的非联网无人机跟踪监控方法。The present invention also discloses another non-networked UAV tracking and monitoring system, which includes one or more processors, memory and one or more programs, wherein one or more programs are stored in the memory and configured To be executed by the one or more processors, the program includes instructions for executing the above-mentioned non-networked UAV tracking and monitoring method. The processor may adopt a general-purpose central processing unit (Central Processing Unit, CPU), a microprocessor, an application-specific integrated circuit (Application Specific Integrated Circuit, ASIC), or one or more integrated circuits for executing related programs to realize The functions to be performed by the modules in the non-networked UAV tracking and monitoring system in the embodiment of the present application, or the method for tracking and monitoring the non-networked UAV in the method embodiment of the present application.
本发明还公开一种计算机可读存储介质,其包括计算机程序,所述计算机程序可被处理器执行以完成如上所述的非联网无人机跟踪监控方法。该计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。该可用介质可以是只读存储器(read-onlymemory,ROM),或随机存取存储器(random access memory,RAM),或磁性介质,例如,软盘、硬盘、磁带、磁碟、或光介质,例如,数字通用光盘(digital versatile disc,DVD)、或者半导体介质,例如,固态硬盘(solid state disk,SSD)等。The present invention also discloses a computer-readable storage medium, which includes a computer program, and the computer program can be executed by a processor to complete the above-mentioned non-networked UAV tracking and monitoring method. The computer-readable storage medium may be any available medium that can be accessed by a computer, or a data storage device such as a server or a data center integrated with one or more available media. The available medium may be a read-only memory (read-only memory, ROM), or a random access memory (random access memory, RAM), or a magnetic medium, for example, a floppy disk, a hard disk, a magnetic tape, a magnetic disk, or an optical medium, for example, A digital versatile disc (digital versatile disc, DVD), or a semiconductor medium, for example, a solid state disk (solid state disk, SSD).
本申请实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。电子设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该电子设备执行上述非联网无人机跟踪监控方法。The embodiment of the present application also discloses a computer program product or computer program, where the computer program product or computer program includes computer instructions, and the computer instructions are stored in a computer-readable storage medium. The processor of the electronic device reads the computer instructions from the computer-readable storage medium, and the processor executes the computer instructions, so that the electronic device executes the above-mentioned non-networked UAV tracking and monitoring method.
以上所揭露的仅为本发明的优选实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等同变化,仍属本发明所涵盖的范围。What is disclosed above is only a preferred embodiment of the present invention, and of course it cannot limit the scope of rights of the present invention. Therefore, equivalent changes made according to the patent scope of the present invention still fall within the scope of the present invention.
Claims (10)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310419867.XA CN116419162A (en) | 2023-04-18 | 2023-04-18 | Non-networked UAV tracking and monitoring method and system based on new generation core network |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310419867.XA CN116419162A (en) | 2023-04-18 | 2023-04-18 | Non-networked UAV tracking and monitoring method and system based on new generation core network |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN116419162A true CN116419162A (en) | 2023-07-11 |
Family
ID=87059399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310419867.XA Pending CN116419162A (en) | 2023-04-18 | 2023-04-18 | Non-networked UAV tracking and monitoring method and system based on new generation core network |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116419162A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118642184A (en) * | 2024-05-29 | 2024-09-13 | 北京中电联达信息技术有限公司 | A method and system for detecting the flight angle of a low, slow, small target based on radio detection |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109001673A (en) * | 2018-05-30 | 2018-12-14 | 北京邮电大学 | A kind of method and base station equipment of unmanned plane detection |
| CN109272755A (en) * | 2018-09-30 | 2019-01-25 | 侍雨 | A kind of additional transport Command Management System based on unmanned plane |
| CN111213103A (en) * | 2017-08-11 | 2020-05-29 | 联想(北京)有限公司 | Aerial vehicle identification |
| CN111954252A (en) * | 2019-04-29 | 2020-11-17 | 华为技术有限公司 | Methods, devices and systems for detection of unauthorized drones |
| KR20230018150A (en) * | 2021-07-29 | 2023-02-07 | 한국전자통신연구원 | Detection method of unauthorized unmanned aerial vehicle and uav base station and backhaul terminal using same |
-
2023
- 2023-04-18 CN CN202310419867.XA patent/CN116419162A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111213103A (en) * | 2017-08-11 | 2020-05-29 | 联想(北京)有限公司 | Aerial vehicle identification |
| CN109001673A (en) * | 2018-05-30 | 2018-12-14 | 北京邮电大学 | A kind of method and base station equipment of unmanned plane detection |
| CN109272755A (en) * | 2018-09-30 | 2019-01-25 | 侍雨 | A kind of additional transport Command Management System based on unmanned plane |
| CN111954252A (en) * | 2019-04-29 | 2020-11-17 | 华为技术有限公司 | Methods, devices and systems for detection of unauthorized drones |
| KR20230018150A (en) * | 2021-07-29 | 2023-02-07 | 한국전자통신연구원 | Detection method of unauthorized unmanned aerial vehicle and uav base station and backhaul terminal using same |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118642184A (en) * | 2024-05-29 | 2024-09-13 | 北京中电联达信息技术有限公司 | A method and system for detecting the flight angle of a low, slow, small target based on radio detection |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200209871A1 (en) | Method and Apparatus for Analyzing Driving Risk and Sending Risk Data | |
| Wu et al. | ADDSEN: Adaptive data processing and dissemination for drone swarms in urban sensing | |
| US11250335B2 (en) | Joint processing for embedded data inference | |
| CN117056558A (en) | Distributed video storage and search using edge computing | |
| Liu et al. | Cost-and-quality aware data collection for edge-assisted vehicular crowdsensing | |
| Wei et al. | Survey of connected automated vehicle perception mode: from autonomy to interaction | |
| US20250175823A1 (en) | Methods and apparatuses for sensing area identification | |
| CN116419162A (en) | Non-networked UAV tracking and monitoring method and system based on new generation core network | |
| CN120213011A (en) | A Beidou-based patrol and inspection drone positioning system | |
| Fu et al. | AI-Powered CPS-Enabled Urban Transportation Digital Twin: Methods and Applications | |
| KR101867548B1 (en) | A method of retrieving a user's context using a mobile device based on wireless signal characteristics | |
| Oka et al. | Spatial feature-based prioritization for transmission of point cloud data in 3D-image sensor networks | |
| WO2025174311A1 (en) | Machine learning based geolocation | |
| CN115620179A (en) | Unmanned aerial vehicle-based fire detection method and device, electronic equipment and medium | |
| Farhat et al. | Cooperative forward collision avoidance system based on deep learning | |
| CN114564037B (en) | A multi-UAV self-organizing collaborative system and method | |
| CN118921698A (en) | Communication method and device | |
| CN120019676A (en) | Electronic device, communication method and storage medium | |
| Velavan et al. | 5G and Edge Computing Enabled Search and Rescue Drones | |
| CN110308978B (en) | A kind of automatic driving software deployment method, device, terminal and server | |
| Zoghlami | Enhancing V2X communication systems for cooperative perception: road users safety | |
| US20260043886A1 (en) | Computing localization uncertainty for devices operating in dynamic environments | |
| Lim et al. | Trajectory prediction of neighboring vehicles via periodic beaconing with inaccurate GPS data | |
| US20240389067A1 (en) | Information communication system, control device, and information communication method | |
| CN120434701B (en) | Data processing method, device, equipment, system and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |