CN113474224A - 车辆控制装置 - Google Patents
车辆控制装置 Download PDFInfo
- Publication number
- CN113474224A CN113474224A CN202080015052.XA CN202080015052A CN113474224A CN 113474224 A CN113474224 A CN 113474224A CN 202080015052 A CN202080015052 A CN 202080015052A CN 113474224 A CN113474224 A CN 113474224A
- Authority
- CN
- China
- Prior art keywords
- braking force
- vehicle
- epb
- control
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000001133 acceleration Effects 0.000 claims abstract description 27
- 230000007246 mechanism Effects 0.000 claims description 23
- 230000008034 disappearance Effects 0.000 claims 2
- 101100222815 Hordeum vulgare EPB2 gene Proteins 0.000 description 37
- 239000012530 fluid Substances 0.000 description 11
- 230000008859 change Effects 0.000 description 9
- 238000001514 detection method Methods 0.000 description 9
- 230000002123 temporal effect Effects 0.000 description 8
- 238000000034 method Methods 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 3
- 238000007796 conventional method Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 230000001174 ascending effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/741—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on an ultimate actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/58—Combined or convertible systems
- B60T13/588—Combined or convertible systems both fluid and mechanical assistance or drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/662—Electrical control in fluid-pressure brake systems characterised by specified functions of the control system components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/035—Bringing the control units into a predefined state, e.g. giving priority to particular actuators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
- F16D65/18—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/10—Automatic or semi-automatic parking aid systems
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/02—Fluid pressure
- F16D2121/04—Fluid pressure acting on a piston-type actuator, e.g. for liquid pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/18—Electric or magnetic
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/18—Electric or magnetic
- F16D2121/24—Electric or magnetic using motors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Regulating Braking Force (AREA)
- Braking Systems And Boosters (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
本发明例如是一种车辆控制装置,具备:驱动力控制部,控制车辆的车轮产生的驱动力;以及制动力控制部,控制所述车轮产生的制动力,其中,通过由所述驱动力控制部产生第一规定量的所述驱动力,并且由所述制动力控制部产生第二规定量的所述制动力,将所述车辆的速度控制为恒定,通过进行由所述驱动力控制部对所述驱动力的控制以及由所述制动力控制部对所述制动力的控制中的一者,对加速和减速均能够进行控制。
Description
技术领域
本发明涉及一种车辆控制装置。
背景技术
在当前的车辆中,提供在驻车过程中自主地进行速度控制的功能的情况与日俱增。该功能通过各种传感器来识别车辆的周边状况等并且自动地控制直至驻车位置为止的车辆速度调整。
此时,通常,通过对驱动力和制动力并行地动态进行控制,来调整车辆的速度。
进一步,在专利文献1中,公开了在自动地实施车辆的速度控制的系统中,当液压制动器由于不良情况而无法产生制动力时,电动制动器(停车制动器)取而代之响应良好地产生制动力,提高安全性。
现有技术文献
专利文献
专利文献1:日本专利第6408585号公报
发明内容
本发明所要解决的技术问题
然而,在以往技术中,根据坡道等、道路的状态,当对驱动力和制动力并行地动态进行控制时,由于各自的控制响应性和精度的差异有时产生控制干涉,存在为了防止控制干涉而控制变得复杂的情况。另外,在液压制动器中具有不良情况时,在电动制动器的控制装置对该不良情况的检测延迟,或液压制动器与电动制动器的控制装置被整合地构成的情况下,存在无法通过电动制动器来实现如预期那样的制动力的情况。
因此,本发明的技术问题在于提供一种车辆控制装置,其能够简化驱动力和制动力的控制并且安全性高。
用于解决技术问题的技术方案
本发明例如是一种车辆控制装置,具备:驱动力控制部,控制车辆的车轮产生的驱动力;以及制动力控制部,控制所述车轮产生的制动力,其中,通过由所述驱动力控制部产生第一规定量的所述驱动力,并且由所述制动力控制部产生第二规定量的所述制动力,将所述车辆的速度控制为恒定,通过进行由所述驱动力控制部对所述驱动力的控制、以及由所述制动力控制部对所述制动力的控制中的一者,对加速和减速均能够进行控制。此时,在将车辆的速度控制为恒定的情况下,如果是在平地行驶时,第一规定量和第二规定量为相同的值,如果是在上坡或者下坡行驶时,第二规定量成为考虑了重力加速度的与第一规定量不同的值。
附图说明
图1是示出第一实施方式的车辆用制动装置的整体概要的示意图。
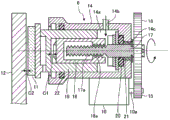
图2是第一实施方式的车辆用制动装置所具备的后轮系统的车轮制动机构的剖面示意图。
图3是示出第一实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。
图4是示出由第一实施方式的车辆控制装置进行的处理的流程图。
图5是示出第二实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。
图6是示出在第二实施方式中在车辆出发之前降低电动制动力时的各物理量的随时间变化的情形的例子的时序图。
图7是示出由第二实施方式的车辆控制装置进行的处理的流程图。
图8是示出第三实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。
图9是示出由第三实施方式的车辆控制装置进行的处理的流程图。
具体实施方式
以下,公开了本发明的示例性的实施方式(第一实施方式至第三实施方式)。以下所示的实施方式的结构、以及通过该结构产生的作用以及结果(效果)是例子。本发明也能够通过以下的实施方式所公开的结构以外来实现。另外,根据本发明,能够获得通过以下的结构获得的各种效果(还包括衍生的效果)中的至少一个。
(第一实施方式)
在第一实施方式中,以在后轮系统中应用了盘式制动型的EPB(Electric ParkingBrake:电子驻车制动器)的车辆用制动装置为例进行说明。图1是示出第一实施方式的车辆用制动装置的整体概要的示意图。图2是第一实施方式的车辆用制动装置上配备的后轮系统的车轮制动机构的剖面示意图。以下,参照这些附图进行说明。
如图1所示,第一实施方式的车辆用制动装置具备行车制动器1(液压制动装置)、以及EPB2。
行车制动器1是这样的液压制动机构,该液压制动机构基于驾驶员对制动踏板3的踩踏,朝向与车轮一体地旋转的制动盘12,通过液压按压制动块11,并产生行车制动力(液压制动力)。具体而言,行车制动器1在通过倍力装置4对与驾驶员对制动踏板3的踩踏相对应的踏力进行增倍之后,在主缸(以下,称为M/C。)5内产生与该增倍的踏力相对应的制动液压。然后,通过将该制动液压传递给各车轮的车轮制动机构上配备的轮缸(以下,称为W/C。)6来产生行车制动力。另外,在M/C5与W/C6之间设置有制动液压控制用的致动器7。致动器7调整由行车制动器1产生的行车制动力,并进行用于提高车辆的安全性的各种控制(例如,防滑件控制等)。
使用致动器7的各种控制由控制行车制动力的ESC(Electronic StabilityControl:电子稳定控制)-ECU8来执行。例如,通过由ESC-ECU8输出用于控制致动器7上配备的未图示的各种控制阀和泵驱动用的电机的控制电流,来控制致动器7上配备的液压电路,并控制向W/C6的W/C传递的压力。由此,进行对车轮打滑的避免等,提高车辆的安全性。
例如,致动器7针对每个车轮具备控制向W/C6施加在M/C5内产生的制动液压或者由泵驱动产生的制动液压的増压控制阀、通过向贮存器供给各W/C6内的制动液来减少W/C压力的减压控制阀等,并且致动器7设置为能够对W/C进行增压/保持/减压控制的结构。另外,致动器7能够实现行车制动器1的自动加压功能,并且基于泵驱动以及各种控制阀的控制,即使在没有制动操作的状态下也能够自动地对W/C6进行加压。
另一方面,EPB2通过由电机10驱动车轮制动机构来产生电动制动力,并且被构成为具有控制电机10的驱动的EPB-ECU9(制动力控制部)。具体而言,例如,EPB2朝向制动盘12通过驱动电机10来按压制动块11,并产生电动制动力,以使驻车时车辆不进行非预期的移动。此外,EPB-ECU9和ESC-ECU8例如通过CAN(Controller Area Network:控制器局域网)通信来进行信息的收发。
车轮制动机构是在第一实施方式的车辆用制动装置中产生制动力的机械构造,首先,前轮系统的车轮制动机构设置为通过行车制动器1的操作来产生行车制动力的构造。另一方面,后轮系统的车轮制动机构设置为对于行车制动器1的操作和EPB2的操作这两者产生制动力的共用的构造。前轮系统的车轮制动机构是相对于后轮系统的车轮制动机构,去除了基于EPB2的操作产生电动制动力的机构的、以往以来通常使用的车轮制动机构,因此在此省略说明,在下面对后轮系统的车轮制动机构进行说明。
在后轮系统的车轮制动机构中,不仅在使行车制动器1工作时,而且在使EPB2工作时,也按压图2所示的作为摩擦部件的制动块11,并通过制动块11夹住作为被摩擦部件的制动盘12(12RL、12RR、12FR、12FL),从而在制动块11与制动盘12之间产生摩擦力,并产生制动力。
具体而言,车轮制动机构在图1所示的制动钳13内,如图2所示,通过使直接固定在用于按压制动块11的W/C6的主体14的电机10旋转,来使电机10的驱动轴10a上配备的正齿轮15旋转。然后,通过向与正齿轮15啮合的正齿轮16传递电机10的旋转力(输出)来使制动块11移动,并产生基于EPB2的电动制动力。
在制动钳13内,除了W/C6以及制动块11之外,还以被制动块11夹住的方式收容制动盘12的端面的一部分。W/C6被构成为,通过将制动液压经过通路14b导入圆筒状的主体14的中空部14a内,从而在作为制动液收容室的中空部14a内产生W/C压力,并且在中空部14a内具备旋转轴17、推进轴18、活塞19等。
旋转轴17的一端穿过形成于主体14的插入孔14c与正齿轮16连接,当正齿轮16转动时,旋转轴17伴随着正齿轮16的转动而转动。在该旋转轴17中的与正齿轮16连接的端部的相反侧的端部中,在旋转轴17的外周面中形成有外螺纹槽17a。另一方面,旋转轴17的另一端通过插入到插入孔14c而被轴支承。具体而言,在插入孔14c中与O型圈20一起设置有轴承21,通过O型圈20不使制动液经由旋转轴17与插入孔14c的内壁面之间而漏出的同时,通过轴承21对旋转轴17的另一端进行轴支承。
推进轴18通过由中空状的筒部件构成的螺母构成,并且在内壁面形成有与旋转轴17的外螺纹槽17a进行螺纹连接的内螺纹槽18a。该推进轴18例如通过构成为具备防止旋转用键的圆柱状或者多边形柱状,成为即使旋转轴17转动也不以旋转轴17的转动中心为中心转动的构造。因此,当旋转轴17转动时,通过外螺纹槽17a与内螺纹槽18a的啮合,将旋转轴17的旋转力转换为使推进轴18在旋转轴17的轴方向上移动的力。当电机10的驱动停止时,推进轴18通过由外螺纹槽17a与内螺纹槽18a的啮合产生的摩擦力而在相同的位置停止,如果在成为作为目标的电动制动力时停止电机10的驱动,则推进轴18保持在该位置,能够保持期望的电动制动力并进行自锁(以下,简称为“锁定”。)。
活塞19被配置成包围推进轴18的外周,通过有底的圆筒部件或者多边形筒部件构成,并且被配置为外周面与形成于主体14的中空部14a的内壁面接触。为了不发生在活塞19的外周面与主体14的内壁面之间的制动液泄露,设置为在主体14的内壁面具备密封部件22,并且向活塞19的端面施加W/C压力的构造。密封部件22用于在锁定控制之后的释放控制时产生用于拉回活塞19的反力。由于具备该密封部件22,因此基本上即使由于在回转过程中倾斜了的制动盘12使制动块11以及活塞19在不超过密封部件22的弹性变形量的范围内被按压,也能够向制动盘12侧推回制动块11以及活塞19并且使制动盘12与制动块11之间保持在规定的间隙(图2的间隙C2)。
另外,为了即使旋转轴17旋转,活塞19也不以旋转轴17的转动中心为中心转动,在推进轴18上具备防止旋转用键的情况下,活塞19设置有该键滑动的键槽,并且在推进轴18为多边形柱状的情况下,活塞19设为与其相对应的形状的多边形筒状。
在该活塞19的顶端配置制动块11,使制动块11伴随着活塞19的移动在纸面左右方向上移动。具体而言,活塞19被构成为,能够伴随着推进轴18的移动向纸面左方向移动,并且能够通过向活塞19的端部(与配置有制动块11的端部相反侧的端部)施加W/C压力而与推进轴18独立地向纸面左方向移动。而且,在推进轴18位于作为通常释放时的待机位置的释放位置(电机10旋转之前的状态)时,如果处于未施加中空部14a内的制动液压的状态(W/C压力=0),通过将在后面进行说明的密封部件22的弹性力使活塞19向纸面右方向移动,使制动块11与制动盘12分离。
另外,在电机10旋转并且推进轴18从初始位置向纸面左方向移动时,即使W/C压力为零,通过移动了的推进轴18限制活塞19向纸面右方向的移动,制动块11被保持在该场所。此外,图2的间隙C1表示推进轴18的顶端与活塞19之间的距离。EPB的释放结束之后,推进轴18相对于主体14被进行位置固定。
在这样构成的车轮制动机构中,当行车制动器1被操作时,基于由此产生的W/C压力使活塞19向纸面左方向移动,由此制动块11向制动盘12按压,产生行车制动力。另外,当EPB2被操作时,通过驱动电机10使正齿轮15旋转,伴随于此,正齿轮16以及旋转轴17旋转,因此,基于外螺纹槽17a以及内螺纹槽18a的啮合使推进轴18向制动盘12侧(纸面左方向)移动。然后,伴随于此,推进轴18的顶端抵接于活塞19并按压活塞19,活塞19也向相同方向移动,由此制动块11按压制动盘12,产生电动制动力。因此,能够形成为对于行车制动器1的操作与EPB2的操作这两者产生制动力的共用的车轮制动机构。
此外,在第一实施方式的车辆用制动装置中,能够通过确认基于检测电机10的电流的电流传感器(未图示)的电流检测值,来确认基于EPB2的电动制动力的产生状态,或者识别该电流检测值。
前后G传感器25检测车辆的前后方向(行进方向)的G(加速度),并向EPB-ECU9发送检测信号。
M/C压力传感器26检测M/C5中的M/C压力,并向EPB-ECU9发送检测信号。
温度传感器28检测车轮制动机构(例如制动盘)的温度,并向EPB-ECU9发送检测信号。
车轮速度传感器29检测各车轮的旋转速度,并向EPB-ECU9发送检测信号。此外,车轮速度传感器29实际上与各车轮相对应地各设置一个,但是在此,省略详细的图示和说明。
EPB-ECU9由具备CPU、ROM、RAM、I/O等的公知的微型计算机构成,通过按照存储在ROM等中的程序控制电机10的旋转来进行驻车制动控制。
EPB-ECU9例如输入与车内的仪表盘(未图示)上配备的操作SW(开关)23的操作状态相对应的信号等,并根据操作SW23的操作状态来驱动电机10。进一步,EPB-ECU9基于电机10的电流检测值来执行锁定控制和释放控制等,并且基于该控制状态来识别是锁定控制中或者是通过锁定控制从而车轮为锁定状态,以及是释放控制中或者是通过释放控制从而车轮为释放状态(EPB解除状态)。然后,EPB-ECU9向仪表盘上配备的显示灯24输出用于进行各种显示的信号。
在如上构成的车辆用制动装置中,基本上,在车辆行驶时,进行由行车制动器1产生行车制动力从而使车辆产生制动力这样的动作。并且,在通过行车制动器1使车辆停车时,进行驾驶员按下操作SW23使EPB2动作来产生电动制动力从而维持停车状态,或者之后解除电动制动力这样的动作。即,作为行车制动器1的动作,当在车辆行驶时进行通过驾驶员对制动踏板3的操作时,在M/C5中产生的制动液压被传递给W/C6从而产生行车制动力。另外,作为EPB2的动作,通过对电机10进行驱动来移动活塞19,并且通过向制动盘12压接制动块11来产生电动制动力从而使车轮处于锁定状态,或者通过使制动块11离开制动盘12来解除电动制动力从而使车轮处于释放状态。
具体而言,通过锁定/释放控制,产生电动制动力或者解除电动制动力。在锁定控制中,通过使电机10正转来使EPB2动作,并且使电机10的旋转停止在通过EPB2产生期望的电动制动力的位置,并且维持该状态。由此,产生期望的电动制动力。在释放控制中,通过使电机10反转来使EPB2动作,并解除通过EPB2产生的电动制动力。
另外,即使是在车辆的行驶时,例如,紧急时、自动驾驶时、行车制动器1的故障时等,也存在使用EPB2是有效的情形,因此,也可以在这些情形下使用EPB2。另外,例如,在自动驾驶中,作为产生制动力的单元,也可以使用EPB2。
车辆控制装置具备:驱动力控制部(未图示),控制车辆的车轮产生的驱动力;以及制动力控制部(ESC-ECU8、EPB-ECU9),控制车轮产生的制动力。在该第一实施方式中,车辆控制装置通过由驱动力控制部产生第一规定量的驱动力,并且由制动力控制部产生第二规定量的制动力,将车辆的速度控制为恒定。在将车辆的速度控制为恒定的情况下,如果是在平地上的行驶时,第一规定量与第二规定量为相同的值,如果是在上坡或者下坡上的行驶时,第二规定量成为考虑了重力加速度的、与第一规定量不同的值。而且,通过进行基于驱动力控制部对驱动力的控制、以及基于制动力控制部对制动力的控制中的一者,对加速和减速均能够进行控制。也就是说,车辆控制装置能够通过以使驱动力与制动力平衡的方式控制驱动力与制动力来使车辆的速度恒定,并且,能够通过从该状态动态地控制驱动力与制动力中的任一者来实现加速与减速这两者。
图3是示出第一实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。在图3中,(a)表示车体速度,(b)表示车体加速度,(c)表示驱动力,(d)表示制动力(液压制动力、电动制动力)。
此外,以下的各实施方式示出了车辆在平地行驶的状况的实施例,因此由驱动力控制部产生的第一规定量与由制动力控制部产生的第二规定量为相同的值。如上述那样,在车辆在上坡或者下坡行驶的状况下,第一规定量与第二规定量将表示不同的值。
在车辆停止的时刻t1,产生驱动力与制动力这两者,但是能够通过使制动力变大来维持车辆的停车状态。之后,在时刻t2,使车辆出发的情况下,能够通过在将驱动力固定的状态下将制动力降低至驱动力以下,来使车辆出发。之后,直至时刻t9为止,通过在将驱动力固定的状态下动态地控制制动力,能够在驱动力大于制动力的时间段使车辆加速,在驱动力小于制动力的时间段使车辆减速。
之后,在时刻t9至时刻t10,通过平衡驱动力与制动力,能够使车体加速度为零,并使车体速度恒定。
另外,在时刻t10至时刻t13,通过在将制动力固定的状态下动态地控制驱动力,能够在驱动力比制动力大的时间段使车辆加速,在驱动力比制动力小的时间段使车辆减速。
之后,在时刻t13至时刻t14,通过平衡驱动力与制动力,能够使车体加速度为零,并且使车体速度恒定。
另外,在时刻t14以后,通过在将驱动力固定的状态下动态地控制制动力,能够在驱动力比制动力大的时间段使车辆加速,并且在驱动力比制动力小的时间段使车辆减速。
图4是示出由第一实施方式的车辆控制装置进行的处理的流程图。此外,在以下的说明中,省略驱动力控制的说明,但是设为产生如图3的(c)所示的驱动力。
在车辆的停车中,在步骤S1中(图3的时刻t1),制动力驱动部(ESC-ECU8、EPB-ECU9中的至少任意者)控制制动装置(行车制动器1、EPB2中的至少任意者),产生比第二规定量大的第四规定量(图3的(d)的时刻t1至t2的制动力的大小)的制动力。
接下来,在步骤S2中,车辆控制装置判定是否存在车辆的出发请求(例如,基于驾驶员的出发操作时、自动驾驶(包括自动驻车。)中的出发判断时),在“是”的情况下进入步骤S3,在“否”的情况下返回到步骤S2。
在步骤S3中(图3的时刻t2),制动力驱动部控制制动装置,使制动力降低至比第二规定量小的第三规定量(图3的(d)的时刻t2至t3的制动力的大小)。
在步骤S4中,车辆控制装置通过使驱动力与制动力中的一者固定并且使驱动力与制动力中的另一者可变的控制,来调整车辆的加速度、速度(图3的时刻t2以后)。
这样,根据第一实施方式的车辆控制装置,能够通过使驱动力与制动力中的一者固定并且使驱动力与制动力中的另一者可变的控制,来调整车辆的加速度、速度,因此能够简化驱动力与制动力的控制,并且能够提高安全性。
例如,在车辆在上坡下坡反复的道路上行驶的情况下,当如以往技术那样并行地动态控制驱动力与制动力时,存在不仅控制变得复杂,而且无用地产生驱动力和制动力,或者控制变得不稳定导致乘坐舒适度变差这样的问题。另一方面,根据第一实施方式的车辆控制装置,能够通过使驱动力与制动力中的一者固定并且使驱动力与制动力中的另一者可变的控制,来调整车辆的加速度、速度,因此控制被简化,能够避免或者减少这种问题的产生。
(第二实施方式)
接下来,对第二实施方式进行说明。对于与第一实施方式同样的事项适当省略说明。此外,行车制动器1与EPB2被构成为各自的制动力较大的一者选择性地发挥作用。具体而言,在图2所示的推进轴18向纸面左方向移动了的状态下电机10停止的情况下,即使没有液压也维持电动制动力,并且,当存在比该电动制动力大的液压制动力时产生该液压制动力。因此,如果推进轴18处于向纸面左方向发生了一定程度移动的状态,则在液压制动装置失效的情况下,也能够避免制动力变为零的事态,能够实现安全性更高的车辆控制。
另外,EPB2是带制动力保持机构的制动装置的一例,所述带制动力保持机构的制动装置在用于产生制动力的能量供给消失之后也能够保持能量供给消失之前的制动力。而且,在车辆的行驶中,制动力控制部通过控制EPB2产生比第二规定量小的第三规定量以上的电动制动力,能够减少对正常时的控制的影响。此外,带制动力保持机构的制动装置不限于EPB,例如,也可以是能够通过常闭的电磁阀等在故障时保持液压的结构。根据这种结构,产生第二规定量以上的制动力,即使在产生故障的情况下也能够保持该液压。在此,如果带制动力保持功能的制动装置为EPB2时,能量是指为了使电机10旋转而供给的电流,当带制动力保持功能的制动装置为电磁阀时,能量是指为了开闭该电磁阀而供给的电流。
图5是示出第二实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。在图5中,(a)表示车体速度,(b)表示车体加速度,(c)表示驱动力,(d)表示制动力。另外,(e)表示液压制动力,(f)表示电动制动力。而且,由于液压制动力与电动制动力中的较大的一者选择性地作为制动力发挥作用,因此,也就是说,(d)的制动力在各时刻与(e)的液压制动力和(f)的电动制动力中的较大的一者相对应。
在车辆停车的时刻t21,产生驱动力与制动力这两者,但是能够通过使制动力变大来维持车辆的停车状态。另外,电动制动力在时刻t21增加至第四规定量,在时刻t22降低至第三规定量,之后维持该状态。另一方面,液压制动力在时刻t21增加至第四规定量,在使车辆出发的时刻t23降低至第三规定量。也就是说,在时刻t23,通过在将驱动力固定的状态下使制动力降低为小于等于驱动力,能够使车辆出发。之后,直至时刻t30为止,通过在将驱动力固定的状态下动态地控制液压制动力,能够在驱动力比制动力大的时间段使车辆加速,在驱动力比制动力小的时间段使车辆减速。
之后,在时刻t30至时刻t31,通过将液压制动力维持为与驱动力相同,并且使驱动力与制动力平衡,能够使车体加速度为零,使车体速度恒定。
另外,在时刻t31至时刻t34,通过在将制动力固定的状态下动态地控制驱动力,能够在驱动力比制动力大的时间段使车辆加速,在驱动力比制动力小的时间段使车辆减速。
之后,在时刻t34至时刻t35,通过维持液压制动力与驱动力相同,并且使驱动力与制动力平衡,能够使车体加速度为零,使车体速度恒定。
另外,在时刻t35以后,通过在将驱动力固定的状态下动态地控制液压制动力,能够在驱动力比制动力大的时间段使车辆加速,在驱动力比制动力小的时间段使车辆减速。
在此,图6是示出在第二实施方式中车辆出发之前降低电动制动力时(图5的时刻t22)的各物理量的随时间变化的情形的例子的时序图。在图6中,(a)表示电动制动力,(b)表示EPB电机电流值(电机10的电流值)。
在车辆的停车中,EPB-ECU9控制EPB2产生比第二规定量大的第四规定量的电动制动力(图5的(f)的时刻t21),之后,在使车辆出发之前,控制EPB2使电动制动力降低至第三规定量(图5的(f)的时刻t22)。
另外,EPB-ECU9在使车辆出发之前控制EPB2将电动制动力降低至第三规定量的情况下,通过基于解除电动制动力的释放控制中的电机10(制动机构驱动电机)的电流特性(作为例子,图6的(b)的“EPB电机电流值”)估计电动制动力,能够调整电动制动力。也就是说,EPB-ECU9能够基于EPB电机电流值,在图6的时刻t21至t24进行了锁定控制之后,在时刻t25至t26进行释放控制并使电动制动力降低至期望的值。另外,之后,EPB-ECU9能够基于EPB电机电流值,在图6的时刻t27至t28进行释放控制并使电动制动力降低至其他的期望的值。
图7是示出由第二实施方式的车辆控制装置进行的处理的流程图。在此,将紧接图5的时刻t21之后作为起点。在车辆的停车中,在步骤S11中(图5的时刻t22),EPB-ECU9控制EPB2使电动制动力降低至第三规定量(图5的(d)的时刻t22以后的电动制动力的大小)。
接下来,在步骤S12中,车辆控制装置判断是否存在车辆的出发请求(例如,基于驾驶员的出发操作时、自动驾驶(包括自动驻车。)中的出发判断时),在“是”的情况下进入步骤S13,在否的情况下返回步骤S12。
在步骤S13中,车辆控制装置通过在将电动制动力固定的状态下,使驱动力与制动力中的一者固定并且使驱动力与制动力中的另一者可变的控制,来调整车辆的加速度、速度(图5的时刻t22以后)。
这样,根据第二实施方式的车辆控制装置,通过在将电动制动力固定的状态下,使驱动力与制动力中的一者固定并且使驱动力与制动力中的另一者可变的控制,能够调整车辆的加速度、速度,因此能够简化驱动力与制动力的控制。
另外,通过在释放控制的中途停止释放动作并调整电动制动力,与在释放控制结束之后进行锁定控制并调整电动制动力的以往方法相比,能够提高响应性。
另外,通过在车辆的行驶中也将电动制动力维持在第三规定量的状态,在行车制动器1失效(基于故障和断电等的停止)的情况下,也处于EPB2的空冲程和气隙被去除的状态,因此能够使EPB2迅速地运作从而实现需要的制动力。
例如,在以往技术的辅助系统(车辆控制装置)中,为了在执行自动驾驶之前去除制动装置的空冲程和气隙,在未产生制动作用的范围使驻车制动工作,并且在产生了作为通常制动装置的脚刹或者脚刹设备(液压制动装置)的故障的情况下,在上坡中部分地减少引擎的驱动转矩,在下坡中全面地减少驱动转矩。在液压制动装置失效的情况下,需要使车辆在安全的场所停车来确保乘坐者的安全,但是在该以往技术中未考虑这种技术问题,仅通过如上述那样的驱动转矩的减速控制无法高精度地控制车速,因此根据周边状况的变化有可能无法使车辆在安全的场所停车。
另一方面,根据第二实施方式的车辆控制装置,即使在液压制动装置无法工作的情况下,电动制动力也维持第三规定量,因此通过动态地控制驱动力,能够精度良好地实现车辆的加速与减速这两者,能够使车辆移动至符合周边状况的期望的场所(目的地、安全的场所等),因此能够确保乘坐者的安全。
另外,只要在车辆出发之前在没有液压制动力的状态下产生电动制动力,就能够不受基于液压的影响地高精度地进行EPB2中的间隙缩小。
(第三实施方式)
接下来,对第三实施方式进行说明。对于与第一实施方式、第二实施方式中的至少一者相同的事项,适当省略说明。在该第三实施方式中,在车辆的行驶中,EPB-ECU9在输出控制EPB2产生电动制动力的指示时,基于驱动力与车辆的加速度的关系,判断EPB2是否正常地工作。也就是说,在产生液压制动力时,不知晓EPB2能够产生多大的电动制动力,因此,如以下那样进行EPB2的故障检测。
图8是示出第三实施方式中的车辆控制时的各物理量的随时间变化的情形的例子的时序图。对于与图5同样的事项,适当省略说明。图8的时刻t41至t50、t52至59与图5的时刻t21至t38相对应。另外,在图8的(a)、(b)、(d)、(f)中,实线为目标值,虚线为实际值。
如图8的(f)所示,设在时刻t51中EPB2失效,之后,电动制动力变为零。在这种情况下,在时刻t54至t55,液压制动力与电动制动力中的较大的一者选择性地作为制动力发挥作用,因此如图8的(d)所示制动力的实际值与目标值不同并且变为零,与之相应地,如图8的(a)所示车体速度也是实际值与目标值不同,另外,如图8的(b)所示车体加速度也是实际值与目标值不同。EPB-ECU9对于该车体速度和车体加速度,基于实际值与目标值不同,能够判断为EPB2为异常。
图9是示出由第三实施方式的车辆控制装置进行的处理的流程图。在步骤S21中(图8的时刻t54),ESC-ECU8控制液压制动装置(行车制动器1),使液压制动力降低至规定值(例如零)。
接下来,在步骤S22中,EPB-ECU9判断车体速度的目标值与实际值之差是否小于等于第一阈值(规定的车体速度阈值),在“是”的情况下进入步骤S23,在“否”的情况下进入步骤S24。
在步骤S23中,EPB-ECU9判断车体加速度的目标值与实际值之差是否小于等于第二阈值(规定的车体加速度阈值),在“是”的情况下进入步骤S25,在“否”的情况下进入步骤S24。
在步骤S24中,EPB-ECU9将EPB2判断为异常。在这种情况下,例如,EPB-ECU9将EPB2为异常的旨意作为数据留在记录中,或者通过显示灯24等通知驾驶员。在步骤S25中,EPB-ECU9将EPB2判断为正常。
这样,根据第三实施方式的车辆控制装置,在产生了电动制动力的情况下,仅通过降低液压制动力并调查车辆状态量(车辆的加速度和速度)的目标值与实际值之差,就能够容易地判断EPB2是否正常地工作。因此,EPB2的可靠性提高。
以上,示例出本发明的实施方式,但是上述实施方式仅是例子,并不旨在限定发明的范围。上述实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、组合、变更。另外,能够适当地变更各结构、形状等规格(构造、种类、数量等)进行实施。
例如,作为由EPB进行制动的对象的车轮不限于后轮,也可以是前轮。另外,作为本发明的对象的车辆的车轮数不局限于四个,也可以是六个以上。
Claims (5)
1.一种车辆控制装置,具备:
驱动力控制部,控制车辆的车轮产生的驱动力;以及
制动力控制部,控制所述车轮产生的制动力,
其中,通过由所述驱动力控制部产生第一规定量的所述驱动力,并且由所述制动力控制部产生第二规定量的所述制动力,将所述车辆的速度控制为恒定,
通过进行由所述驱动力控制部对所述驱动力的控制、以及由所述制动力控制部对所述制动力的控制中的一者,对加速和减速均能够进行控制。
2.根据权利要求1所述的车辆控制装置,其中,
所述车辆具备带制动力保持机构的制动装置作为使所述车轮产生制动力的装置,所述带制动力保持机构的制动装置能够在用于产生制动力的能量供给消失之后也保持所述能量供给消失之前的制动力,
在所述车辆的行驶中,所述制动力控制部控制所述带制动力保持机构的制动装置产生比所述第二规定量小的第三规定量以上的制动力。
3.根据权利要求2所述的车辆控制装置,其中,
所述车辆具备作为所述带制动力保持机构的制动装置的EPB以及液压制动装置作为使所述车轮产生制动力的装置,所述EPB以及所述液压制动装置被构成为各自的制动力较大的一者选择性地发挥作用,
在所述车辆的行驶中,所述制动力控制部在输出控制所述EPB产生电动制动力的指示时,基于所述驱动力与所述车辆的加速度的关系,判断所述EPB是否正常地工作。
4.根据权利要求1所述的车辆控制装置,其中,
所述车辆具备EPB以及液压制动装置作为使所述车轮产生制动力的装置,所述EPB以及所述液压制动装置被构成为各自的制动力较大的一者选择性地发挥作用,
在所述车辆的停车中,所述制动力控制部控制所述EPB产生比所述第二规定量大的第四规定量的电动制动力,之后,在使所述车辆出发之前,控制所述EPB使所述电动制动力降低至比所述第二规定量小的第三规定量。
5.根据权利要求4所述的车辆控制装置,其中,
所述制动力控制部在使所述车辆出发之前,控制所述EPB将所述电动制动力降低至所述第三规定量的情况下,通过基于解除所述电动制动力的释放控制中的制动机构驱动电机的电流特性估计所述电动制动力,来调整所述电动制动力。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019032050A JP7331379B2 (ja) | 2019-02-25 | 2019-02-25 | 車両制御装置 |
| JP2019-032050 | 2019-02-25 | ||
| PCT/JP2020/007285 WO2020175419A1 (ja) | 2019-02-25 | 2020-02-25 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113474224A true CN113474224A (zh) | 2021-10-01 |
| CN113474224B CN113474224B (zh) | 2023-09-26 |
Family
ID=72238874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202080015052.XA Active CN113474224B (zh) | 2019-02-25 | 2020-02-25 | 车辆控制装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12187249B2 (zh) |
| JP (1) | JP7331379B2 (zh) |
| CN (1) | CN113474224B (zh) |
| WO (1) | WO2020175419A1 (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021205969B3 (de) * | 2021-06-11 | 2022-07-07 | Volkswagen Aktiengesellschaft | Verfahren, Vorrichtung und Computerprogrammprodukt zum verspannten Bewegen eines Fahrzeugs |
| FR3147766A1 (fr) * | 2023-04-17 | 2024-10-18 | Hitachi Astemo France | Systeme de commande d'un dispositif de freinage apte a mettre en œuvre une fonction de freinage d'immobilisation |
| WO2024257741A1 (ja) * | 2023-06-13 | 2024-12-19 | 株式会社デンソー | 車両用制御装置及び車両用制御方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030154014A1 (en) * | 2002-01-11 | 2003-08-14 | Aisin Seiki Kabushiki Kaisha | Vehicle traveling control system |
| US20090069995A1 (en) * | 2007-09-06 | 2009-03-12 | Advics Co., Ltd. | Vehicle drive control device |
| CN101454171A (zh) * | 2006-06-07 | 2009-06-10 | 丰田自动车株式会社 | 用于控制车辆的系统及方法 |
| JP2018090064A (ja) * | 2016-12-01 | 2018-06-14 | 本田技研工業株式会社 | 走行制御装置、車両、走行制御装置の制御方法、プログラム |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5615933A (en) * | 1995-05-31 | 1997-04-01 | General Motors Corporation | Electric vehicle with regenerative and anti-lock braking |
| US7822524B2 (en) * | 2003-12-26 | 2010-10-26 | Toyota Jidosha Kabushiki Kaisha | Vehicular drive system |
| WO2006029353A2 (en) * | 2004-09-09 | 2006-03-16 | Kelsey-Hayes Company | Vehicular system having regenerative brake control |
| JP4831475B2 (ja) * | 2006-04-14 | 2011-12-07 | 新東工業株式会社 | 治具パレット |
| JP4858310B2 (ja) * | 2007-05-29 | 2012-01-18 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP5137897B2 (ja) * | 2009-05-20 | 2013-02-06 | 本田技研工業株式会社 | 車両の走行制御装置 |
| US8700241B2 (en) * | 2009-10-19 | 2014-04-15 | Toyota Jidosha Kabushiki Kaisha | Drive control device for standby four-wheel drive vehicle |
| WO2012032605A1 (ja) * | 2010-09-07 | 2012-03-15 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| JP5699041B2 (ja) * | 2011-06-15 | 2015-04-08 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| DE102013201691A1 (de) * | 2012-10-25 | 2014-04-30 | Robert Bosch Gmbh | Verfahren zum Bremsen eines Fahrzeuges und ein ein solches Verfahren verwendendes Bremssystem |
| JP5430732B2 (ja) | 2012-11-13 | 2014-03-05 | 本田技研工業株式会社 | 車両の走行制御装置 |
| DE102013218401A1 (de) | 2013-09-13 | 2015-03-19 | Robert Bosch Gmbh | Fahrassistenzsystem mit gesteigerter Ausfallsicherheit und Verfügbarkeit |
| JP6020482B2 (ja) * | 2014-02-13 | 2016-11-02 | 株式会社デンソー | 車両走行制御装置 |
| US10167015B2 (en) * | 2015-05-11 | 2019-01-01 | GM Global Technology Operations LLC | System for retrofitting vehicle automation |
| US10065641B2 (en) * | 2016-04-15 | 2018-09-04 | Ford Global Technologies, Llc | Brake fade and brake capacity based powertrain operation |
| JP6610525B2 (ja) | 2016-12-15 | 2019-11-27 | トヨタ自動車株式会社 | 走行支援装置 |
| DE112018006742T5 (de) * | 2017-12-31 | 2020-09-24 | ZF Active Safety U.S. Inc. | Fahrzeugbremsanlage und verfahren zum erfassen der kolbenstellung einer plungerbaugruppe |
| DE112018006744T5 (de) * | 2017-12-31 | 2020-09-24 | ZF Actice Safety U.S. Inc. | Fahrzeugbremssystem und Verfahren zur Bestimmung einer Undichtigkeit davon |
| DE102018002990A1 (de) * | 2018-04-12 | 2019-10-17 | Lucas Automotive Gmbh | Hydraulische Kraftfahrzeug-Bremsanlage und Verfahren zum Betreiben derselben |
| US10759431B2 (en) * | 2018-06-21 | 2020-09-01 | Deere & Company | Enhanced braking method and apparatus for hybrid machine |
-
2019
- 2019-02-25 JP JP2019032050A patent/JP7331379B2/ja active Active
-
2020
- 2020-02-25 CN CN202080015052.XA patent/CN113474224B/zh active Active
- 2020-02-25 WO PCT/JP2020/007285 patent/WO2020175419A1/ja active Application Filing
- 2020-02-25 US US17/429,020 patent/US12187249B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030154014A1 (en) * | 2002-01-11 | 2003-08-14 | Aisin Seiki Kabushiki Kaisha | Vehicle traveling control system |
| CN101454171A (zh) * | 2006-06-07 | 2009-06-10 | 丰田自动车株式会社 | 用于控制车辆的系统及方法 |
| US20090069995A1 (en) * | 2007-09-06 | 2009-03-12 | Advics Co., Ltd. | Vehicle drive control device |
| JP2018090064A (ja) * | 2016-12-01 | 2018-06-14 | 本田技研工業株式会社 | 走行制御装置、車両、走行制御装置の制御方法、プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7331379B2 (ja) | 2023-08-23 |
| CN113474224B (zh) | 2023-09-26 |
| US12187249B2 (en) | 2025-01-07 |
| JP2020132096A (ja) | 2020-08-31 |
| WO2020175419A1 (ja) | 2020-09-03 |
| US20220017056A1 (en) | 2022-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7056301B2 (ja) | 制動制御装置 | |
| CN107646001B (zh) | 用于在车辆中提供制动力的方法 | |
| JP4881807B2 (ja) | 液圧ブレーキ装置 | |
| WO2013180107A1 (ja) | 車両用ブレーキ装置 | |
| CN113474224A (zh) | 车辆控制装置 | |
| CN112041203B (zh) | 制动控制装置 | |
| CN113874262B (zh) | 制动控制装置 | |
| JP2022173338A (ja) | ブレーキ制御装置 | |
| JP7230523B2 (ja) | ブレーキ制御装置 | |
| JP7091887B2 (ja) | 制動制御装置 | |
| JP7327105B2 (ja) | 制動制御装置 | |
| WO2024122634A1 (ja) | 電動駐車ブレーキ装置 | |
| JP2019026126A (ja) | 制動制御装置 | |
| JP2024065594A (ja) | 車両のブレーキ装置 | |
| JP2024048594A (ja) | 車両のブレーキ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |