CN112850113A - 一种可调式旋转机械手 - Google Patents
一种可调式旋转机械手 Download PDFInfo
- Publication number
- CN112850113A CN112850113A CN202011394198.8A CN202011394198A CN112850113A CN 112850113 A CN112850113 A CN 112850113A CN 202011394198 A CN202011394198 A CN 202011394198A CN 112850113 A CN112850113 A CN 112850113A
- Authority
- CN
- China
- Prior art keywords
- fixed
- clamping jaw
- baffle plate
- optical axis
- rotating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/904—Devices for picking-up and depositing articles or materials provided with rotary movements only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/22—Devices influencing the relative position or the attitude of articles during transit by conveyors
- B65G47/24—Devices influencing the relative position or the attitude of articles during transit by conveyors orientating the articles
- B65G47/244—Devices influencing the relative position or the attitude of articles during transit by conveyors orientating the articles by turning them about an axis substantially perpendicular to the conveying plane
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/03—Stacking of articles by adding to the top of the stack from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
- B65G2201/0238—Bags
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明公开了一种可调式旋转机械手,包括连接座、转动机构及两组夹持机构,所述转动机构包括转动电机、同步轮、旋转轴及同步带,所述旋转轴一端设置于连接座内,所述旋转轴通过轴承与连接座转动连接,所述旋转轴另一端延伸至连接座下方,所述同步轮固定于旋转轴另一端,所述转动电机固定于连接座一侧,所述同步轮与转动电机通过同步带传动连接,所述同步轮下方设有固定座,所述固定座内固定设有光轴,所述光轴贯穿于固定座两侧,所述固定座位于光轴中部,所述夹持机构分别相对设置于光轴两端。本发明提供了一种可调式旋转机械手,能够将机械手进行转动,从而使机械手所夹持的编织袋也能一同进行转向,便于人们进行搬运和堆垛。
Description
技术领域
本发明涉及编织袋生产设备技术领域,尤其涉及一种可调式旋转机械手。
背景技术
编织袋在进行生产加工之后,需要从而生产线上转移至存放的区域,在此过程中,需要对编织袋进行移动和堆垛。而现有对编织袋进行搬运的方式主要有两种,一种采用人工的方式对编织袋进行堆垛和搬运,但是采用人工的方式不仅效率低,也容易出现堆放不整齐,堆放高度较低的情况;另一种采用机械设备的方式对编织袋进行堆垛和搬运,通过机械手对编织袋进行抓取,再通过移动装置带动机械手进行移动,从而完成转移堆垛的目的,但是现有的机械手只能进行抓取的动作,在一些特殊的情况时,需要将编织袋的方向进行变化时,无法进行转动,从而无法对编织袋进行堆垛和搬运。
发明内容
本发明的目的在于提供一种可调式旋转机械手,能够将机械手进行转动,从而使机械手所夹持的编织袋也能一同进行转向,便于人们进行搬运和堆垛。
本发明公开的一种可调式旋转机械手所采用的技术方案是:
一种可调式旋转机械手,包括连接座、转动机构及两组夹持机构,所述转动机构包括转动电机、同步轮、旋转轴及同步带,所述旋转轴一端设置于连接座内,所述旋转轴通过轴承与连接座转动连接,所述旋转轴另一端延伸至连接座下方,所述同步轮固定于旋转轴另一端,所述转动电机固定于连接座一侧,所述同步轮与转动电机通过同步带传动连接,所述同步轮下方设有固定座,所述固定座内固定设有光轴,所述光轴贯穿于固定座两侧,所述固定座位于光轴中部,所述夹持机构分别相对设置于光轴两端。
作为优选方案,所述光轴数量至少为两根,所述光轴两端分别于夹持机构固定连接。
作为优选方案,所述夹持机构包括挡板、气缸、转动杆、夹爪及固定块,所述固定块设置于挡板上方,所述挡板通过固定块与光轴固定连接,所述气缸设置于挡板靠近固定座一侧,所述气缸与挡板转动连接,所述气缸的输出轴朝向挡板另一侧,所述气缸的输出轴通过连接块与转动杆进行连接,所述连接块一端与转动杆固定连接,所述连接块另一端与气缸的输出轴转动连接,所述转动杆通过固定杆固定于挡板上方,所述转动杆与固定杆转动连接,所述夹爪成L型结构,所述夹爪上端与转动杆固定连接,所述夹爪下端位于挡板下方。
作为优选方案,所述夹爪与转动杆之间通过调整杆进行固定连接,所述调整杆一端与转动杆固定连接,所述夹爪靠近转动杆一端的表面开设有腰形孔,所述夹爪通过紧固件穿过腰形孔与调整杆固定连接。
作为优选方案,所述夹爪数量为若干个。
作为优选方案,所述气缸数量为两个,所述气缸分别设置于挡板两端。
作为优选方案,所述挡板靠近固定座一侧设有用于检测产品的传感器。
本发明公开的一种可调式旋转机械手的有益效果是:转动机构的转动电机设置于连接座一侧,通过转动电机和同步带传递同步轮一同进行转动,同步轮与旋转轴固定连接,旋转轴一端与连接柱转动连接,从而旋转轴也一同进行转动,固定在旋转轴下方的固定座在旋转轴的带动下,固定座也一同进行转动,通过光轴固定于固定座两侧的夹持机构,跟随固定座进行转动。在生产过程中,通过夹持机构对生产好的编织袋进行抓取,再通过转动电机带动旋转轴进行转动,使夹持机构也进行转动,从而将编织袋的角度方向进行调整,便于人们更好地进行搬运和堆垛。
附图说明
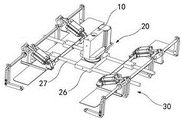
图1是本发明一种可调式旋转机械手的结构示意图;
图2是本发明一种可调式旋转机械手转动机构的结构示意图;
图3是本发明一种可调式旋转机械手夹持结构的结构示意图。
具体实施方式
下面结合具体实施例和说明书附图对本发明做进一步阐述和说明:
请参考图1和图2,一种可调式旋转机械手,包括连接座10、转动机构20及两组夹持机构30。
转动机构20包括转动电机21、同步轮22、旋转轴23及同步带24,旋转轴23一端设置于连接座10内,旋转轴23通过轴承25与连接座10转动连接,旋转轴23另一端延伸至连接座10下方,同步轮22固定于旋转轴23另一端,转动电机21固定于连接座10一侧,同步轮22与转动电机21通过同步带24传动连接,同步轮22下方设有固定座26,固定座26内固定设有光轴27,光轴27贯穿于固定座26两侧,固定座26位于光轴27中部,夹持机构30分别相对设置于光轴27两端。
转动机构20的转动电机21设置于连接座10一侧,通过转动电机21和同步带24传递同步轮22一同进行转动,同步轮22与旋转轴23固定连接,旋转轴23一端与连接柱转动连接,从而旋转轴23也一同进行转动,固定在旋转轴23下方的固定座26在旋转轴23的带动下,固定座26也一同进行转动,通过光轴27固定于固定座26两侧的夹持机构30,跟随固定座26进行转动。
在生产过程中,通过夹持机构30对生产好的编织袋进行抓取,再通过转动电机21带动旋转轴23进行转动,使夹持机构30也进行转动,从而将编织袋的角度方向进行调整,便于人们更好地进行搬运和堆垛。
光轴27数量至少为两根,光轴27两端分别于夹持机构30固定连接,使夹持机构30能够更加稳定的固定在光轴27上,确保有足够地支撑力对夹持机构30进行支撑。
请参考图3,夹持机构30包括挡板31、气缸32、转动杆33、夹爪34及固定块35,固定块35设置于挡板31上方,挡板31通过固定块35与光轴27固定连接,气缸32设置于挡板31靠近固定座26一侧,气缸32与挡板31转动连接,气缸32的输出轴朝向挡板31另一侧,气缸32的输出轴通过连接块36与转动杆33进行连接,连接块36一端与转动杆33固定连接,连接块36另一端与气缸32的输出轴转动连接,转动杆33通过固定杆37固定于挡板31上方,转动杆33与固定杆37转动连接,夹爪34成L型结构,夹爪34上端与转动杆33固定连接,夹爪34下端位于挡板31下方。
通过气缸32的输出轴朝向挡板31远离固定座26一侧推动,使转动杆33在固定杆37上朝挡板31外侧进行转动,从而带动夹爪34朝向挡板31靠近固定座26一侧进行转动,通过夹爪34和挡板31将编织袋进行夹持固定。反之,当气缸32的输出轴朝向挡板31靠近固定座26一侧进行收缩时,即将夹爪34夹持的编织袋进行松开,从而完成搬运的目的。
并且挡板31可通过固定块35在光轴27上进行调整,使两个夹持机构30之间的距离进行调整,满足不同尺寸的编织袋进行夹持的目的。
上述方案中,夹爪34与转动杆33之间通过调整杆38进行固定连接,调整杆38一端与转动杆33固定连接,夹爪34靠近转动杆33一端的表面开设有腰形孔341,夹爪34通过紧固件穿过腰形孔341与调整杆38固定连接。
通过夹爪34上的腰形孔341可调整夹爪34在调整杆38上的位置,从而改变夹爪34另一端与挡板31之间的距离,用于夹持不同堆叠厚度的编织袋。
上述夹爪34数量为若干个,提高夹爪34在抓取编织袋时的抓取力,确保编织袋在抓取时能够更加牢固。
并且气缸32数量为两个,气缸32分别设置于挡板31两端,转动杆33两端能够避免发生偏差,利用两个气缸32同时带动转动杆33两端进行转动,使转动杆33上的夹爪34能够同步进行夹持。
在挡板31靠近固定座26一侧设有用于检测产品的传感器39,利用传感器39能够检测夹持机构30是否在进行夹持时,准确位于编织袋的上方,并且在夹持机构30松开之后,编织袋是否能顺利掉落的情况。
本发明提供一种可调式旋转机械手,转动机构的转动电机设置于连接座一侧,通过转动电机和同步带传递同步轮一同进行转动,同步轮与旋转轴固定连接,旋转轴一端与连接柱转动连接,从而旋转轴也一同进行转动,固定在旋转轴下方的固定座在旋转轴的带动下,固定座也一同进行转动,通过光轴固定于固定座两侧的夹持机构,跟随固定座进行转动。在生产过程中,通过夹持机构对生产好的编织袋进行抓取,再通过转动电机带动旋转轴进行转动,使夹持机构也进行转动,从而将编织袋的角度方向进行调整,便于人们更好地进行搬运和堆垛。
最后应当说明的是,以上实施例仅用以说明本发明的技术方案,而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细地说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
Claims (7)
1.一种可调式旋转机械手,其特征在于,包括连接座、转动机构及两组夹持机构,所述转动机构包括转动电机、同步轮、旋转轴及同步带,所述旋转轴一端设置于连接座内,所述旋转轴通过轴承与连接座转动连接,所述旋转轴另一端延伸至连接座下方,所述同步轮固定于旋转轴另一端,所述转动电机固定于连接座一侧,所述同步轮与转动电机通过同步带传动连接,所述同步轮下方设有固定座,所述固定座内固定设有光轴,所述光轴贯穿于固定座两侧,所述固定座位于光轴中部,所述夹持机构分别相对设置于光轴两端。
2.如权利要求1所述的一种可调式旋转机械手,其特征在于,所述光轴数量至少为两根,所述光轴两端分别于夹持机构固定连接。
3.如权利要求1所述的一种可调式旋转机械手,其特征在于,所述夹持机构包括挡板、气缸、转动杆、夹爪及固定块,所述固定块设置于挡板上方,所述挡板通过固定块与光轴固定连接,所述气缸设置于挡板靠近固定座一侧,所述气缸与挡板转动连接,所述气缸的输出轴朝向挡板另一侧,所述气缸的输出轴通过连接块与转动杆进行连接,所述连接块一端与转动杆固定连接,所述连接块另一端与气缸的输出轴转动连接,所述转动杆通过固定杆固定于挡板上方,所述转动杆与固定杆转动连接,所述夹爪成L型结构,所述夹爪上端与转动杆固定连接,所述夹爪下端位于挡板下方。
4.如权利要求3所述的一种可调式旋转机械手,其特征在于,所述夹爪与转动杆之间通过调整杆进行固定连接,所述调整杆一端与转动杆固定连接,所述夹爪靠近转动杆一端的表面开设有腰形孔,所述夹爪通过紧固件穿过腰形孔与调整杆固定连接。
5.如权利要求4所述的一种可调式旋转机械手,其特征在于,所述夹爪数量为若干个。
6.如权利要求3所述的一种可调式旋转机械手,其特征在于,所述气缸数量为两个,所述气缸分别设置于挡板两端。
7.如权利要求3所述的一种可调式旋转机械手,其特征在于,所述挡板靠近固定座一侧设有用于检测产品的传感器。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011394198.8A CN112850113A (zh) | 2020-12-02 | 2020-12-02 | 一种可调式旋转机械手 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011394198.8A CN112850113A (zh) | 2020-12-02 | 2020-12-02 | 一种可调式旋转机械手 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112850113A true CN112850113A (zh) | 2021-05-28 |
Family
ID=75996912
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011394198.8A Pending CN112850113A (zh) | 2020-12-02 | 2020-12-02 | 一种可调式旋转机械手 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112850113A (zh) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997004928A1 (fr) * | 1995-07-27 | 1997-02-13 | Ken Yanagisawa | Mecanisme de deplacement |
| CN1923472A (zh) * | 2006-09-08 | 2007-03-07 | 清华大学 | 一种袋类包装搬运码垛机器人手部 |
| CN103144119A (zh) * | 2013-03-26 | 2013-06-12 | 广州创研自动化设备有限公司 | 机器人搬运夹手机构 |
| CN203973530U (zh) * | 2013-12-31 | 2014-12-03 | 浙江工业大学 | 一种转位夹持机械手 |
| CN204384375U (zh) * | 2014-12-29 | 2015-06-10 | 湖州盟泰物流设备有限公司 | 袋装米面转包机 |
| CN105775687A (zh) * | 2016-05-20 | 2016-07-20 | 河北晓进机械制造股份有限公司 | 锚杆捆扎整理设备 |
| CN106348009A (zh) * | 2016-11-18 | 2017-01-25 | 山东爱而生智能科技有限公司 | 一种栈板抓取机构及能抓取栈板的机械手 |
| US9868219B1 (en) * | 2017-02-25 | 2018-01-16 | Citic Dicastal Co., Ltd | Self-adjusting robot clamping jaw for grabbing hub |
| CN110775587A (zh) * | 2018-07-30 | 2020-02-11 | 深圳市聚能自动化设备有限公司 | 一种零件换向转料机构 |
| CN211073651U (zh) * | 2019-09-09 | 2020-07-24 | 肇庆富丰包装有限公司 | 一种编织袋抓手 |
| CN214358849U (zh) * | 2020-12-02 | 2021-10-08 | 和诚工业发展(深圳)有限公司 | 一种可调式旋转机械手 |
-
2020
- 2020-12-02 CN CN202011394198.8A patent/CN112850113A/zh active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1997004928A1 (fr) * | 1995-07-27 | 1997-02-13 | Ken Yanagisawa | Mecanisme de deplacement |
| CN1923472A (zh) * | 2006-09-08 | 2007-03-07 | 清华大学 | 一种袋类包装搬运码垛机器人手部 |
| CN103144119A (zh) * | 2013-03-26 | 2013-06-12 | 广州创研自动化设备有限公司 | 机器人搬运夹手机构 |
| CN203973530U (zh) * | 2013-12-31 | 2014-12-03 | 浙江工业大学 | 一种转位夹持机械手 |
| CN204384375U (zh) * | 2014-12-29 | 2015-06-10 | 湖州盟泰物流设备有限公司 | 袋装米面转包机 |
| CN105775687A (zh) * | 2016-05-20 | 2016-07-20 | 河北晓进机械制造股份有限公司 | 锚杆捆扎整理设备 |
| CN106348009A (zh) * | 2016-11-18 | 2017-01-25 | 山东爱而生智能科技有限公司 | 一种栈板抓取机构及能抓取栈板的机械手 |
| US9868219B1 (en) * | 2017-02-25 | 2018-01-16 | Citic Dicastal Co., Ltd | Self-adjusting robot clamping jaw for grabbing hub |
| CN110775587A (zh) * | 2018-07-30 | 2020-02-11 | 深圳市聚能自动化设备有限公司 | 一种零件换向转料机构 |
| CN211073651U (zh) * | 2019-09-09 | 2020-07-24 | 肇庆富丰包装有限公司 | 一种编织袋抓手 |
| CN214358849U (zh) * | 2020-12-02 | 2021-10-08 | 和诚工业发展(深圳)有限公司 | 一种可调式旋转机械手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN214358849U (zh) | 一种可调式旋转机械手 | |
| CN109573611A (zh) | 一种可调节的搬运机器人抓手 | |
| CN212558244U (zh) | 箱体夹持翻转装置 | |
| CN115319785B (zh) | 一种旋转型夹爪 | |
| CN108247665A (zh) | 一种用于重型桁架机械手的勾手爪 | |
| CN105887777A (zh) | 一种全自动水利发电工程排水管夹取一体机 | |
| CN215508464U (zh) | 钢管折弯装置 | |
| CN116754261B (zh) | 一种汽车顶棚检测工装 | |
| CN112850113A (zh) | 一种可调式旋转机械手 | |
| CN109434518A (zh) | 一种基于电机驱动的高精度铜管铣面自动翻转装置 | |
| CN209476534U (zh) | 一种板材夹取翻转装置 | |
| CN111168711A (zh) | 定子夹取翻转机械手 | |
| CN207368067U (zh) | 一种极耳找正机构 | |
| CN215149250U (zh) | 一种包装袋加工用抓手 | |
| CN212527778U (zh) | 一种多角度调节机械手爪 | |
| CN108748126A (zh) | 一种搬砖机器人 | |
| CN105397395B (zh) | U式夹持爪自定心回转装置 | |
| CN210998743U (zh) | 一种解魔方机器人 | |
| CN209632442U (zh) | 一种装配单元 | |
| CN209601412U (zh) | 一种动力电池等间距分离机构 | |
| CN208729111U (zh) | 用于蓄电池的充电螺钉拆卸装置 | |
| CN213397620U (zh) | 一种齿轮方向检测与调整装置 | |
| CN208274157U (zh) | 一种手套机械摘取装置 | |
| CN214980405U (zh) | 一种汽车发电机皮带轮生产用固定夹具 | |
| CN203127773U (zh) | 堆垛钢板的磁力分张装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |