1. Introduction
With the easy access and high durability, concrete structures have become a ubiquitary sight in recent decades. Along with their presence everywhere, there is the inevitable need for a maintenance plan in order to ensure in-service safety and to prolong the lifetime of concrete structures. Numerous studies [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10] have been conducted by laboratories, companies, and individuals racing to identify solutions regarding the performance amelioration of structural health monitoring (SHM). By employing an effective monitoring scheme, it is possible to provide the user with more insight into the in-service system/structure, avoid near-future failures, and lessen downtime by a significant amount.
Among SHM topics, the remaining useful lifetime (RUL) prognosis is one of the most concerned problems, in which a solution is provided to predict how long a structure can be used until it is permanently out-of-service because of a failure(s). By predicting the future state of the structure, a user can approximate the time when a failure might occur, thus adjusting the usage and preparing a maintenance plan accordingly in advance. The most recent studies [
11,
12,
13,
14,
15,
16] regarding this topic focus on the development of an autonomous system that is capable of extracting feature(s) from data and constructing indicators based on these extracted features. A common scheme for this approach is as follows: initially, sensors are deployed, which are then utilized to collect and send the real-time data to the central brain where data processing and health indicator construction occur.
As nondestructive methods for SHM have become dominant in recent years, different methods have been investigated for concrete SHM such as ultrasonic [
5,
17,
18], vibration [
19,
20], image processing [
3,
21,
22], and acoustic emission (AE) [
4,
12,
23,
24,
25,
26,
27,
28,
29,
30,
31]. Even though ultrasonic testing can detect internal defects and their sizes, it is susceptible to complicated part geometry and certain materials, such as austenitic steel, which can mask defects by causing attenuation. Concerning vibration techniques, they are restricted by their limited band of frequency. In addition, although image processing techniques offer the most facile setup among all mentioned methods, they are only capable of detecting failures on the surface. In comparison to these nondestructive methods, AE techniques, which study and exploit the release of internal elastic energy by a discontinuity appearance, offer a nondirectional means of monitoring capable of achieving in-service testing without downtime [
32]. A single test of AE can allow users to track the specimen’s deterioration process dynamically, while highlighting the severity of the damage. The drawback of this method is that AE can only be utilized to detect the occurrence of new discontinuities, not existing ones. However, as the purpose of the AE test is to detect novelties to the current state of the specimen, this drawback can be considered insignificant in comparison to the benefits that it provides. In this study, we focus on employing a technique using AE sensors.
The data collected by AE sensors are then analyzed for health indicator (HI) construction. The approaches of HI construction for RUL prediction, similar to the prognosis and health management framework in general, can be roughly classified as model-based or data-based. The methods following the first category focus on real-life process imitation, which is established via mathematical means. Given the drawback of being increasingly problematic as the model becomes more complex, it is less favorable than the data-based approach, in which the interested patterns are derived from available data even in the absence of knowledge about the nature of the system or the fault. Therefore, the data-based approach is the main priority of this study. Further discussion on HI construction can be found in
Section 2.
To ensure the reliability of the constructed HI, an evaluation is needed. According to a previous survey [
33], the evaluation of HI can be performed by two approaches: one concerning the fitness analysis of the construction result and the other considering the RUL prognosis performance. Further discussion on the HI construction framework and evaluation is continued in
Section 2.
The HI construction and evaluation is presented in
Figure 1:
Initially, the raw data are collected from the specimen throughout its deterioration process. It is then utilized for the calculation of Kullback–Leibler divergence (KLD) at each time step of each run-to-fail signal. Afterward, the raw signal is fed to the HI constructor, where its spectrum is computed and used to reduce computation complexity. The stacked auto-encoder (SAE) takes the spectrum as input for the pretraining process, which is subsequently fine-tuned into the deep neural network (DNN) to construct the HI lines with the calculated KLD as the training label. Finally, the evaluation of HI is performed using both intrinsic measures and RUL prediction to test the proposed method’s reliability.
In summary, this study proposes a data-based approach for HI construction based on KLD, for which the expertise concerning concrete material and the nature of the fracturing process is not required. The constructed HI, through its ability to accurately describe the deterioration process of concrete structures, can be utilized for RUL prognosis and can allow users to plan maintenance prior to possible structural failures in the near future. The following contributions are proposed:
A novel HI construction process is proposed using KLD to describe the state of the concrete specimen during its lifetime directly from raw AE data, which has not been previously investigated to the extent of the authors’ knowledge.
Evaluation of the proposed HI construction using both fitness analysis and RUL prediction.
The arrangement of the following sections is as follows:
Section 2 discusses the general HI construction framework and evaluation; the process of HI construction is provided in detail in
Section 3;
Section 4 describes the experimental setup and HI evaluation using the two discussed methods; finally,
Section 5 provides a conclusion, along with a discussion of future research possibilities.
2. The General Health Indicator Construction Framework and Evaluation
HI construction is an essential part of the prognosis to portray the timeline of deterioration. HI shows the condition in which the specimen under investigation is. By analyzing the current HI, it is possible to predict future values and their timing, thus allowing the RUL to be estimated. Over the years, numerous studies have proposed different approaches to build a HI, especially in more recent studies [
34,
35,
36], and in summary, this process can be generally divided into two steps: (1) calculation of the HI-constructing factor(s) and (2) HI construction from the calculated factor(s).
The calculation of the HI-constructing factor(s) (also known as features) is often performed either in the time, frequency, or time–frequency domain. The time domain approaches [
27,
28,
37,
38] generally offer a fast and simple solution that can be widely applicable to systems and fault types. They often include statistical computation and impulse analysis. These methods, however, are susceptible to interferences, which are typically inevitable in real-life applications. Therefore, pre-processing techniques are necessary to minimize performance degradation. Frequency domain solutions [
39,
40] explore anomalies in the system with prior information of the fault characteristic frequencies already known. They are often adapted in model-based methods and can offer high efficiency; however, they are not widely applicable. The approaches following a time–frequency domain solution [
41] are the most powerful among these three and can be highly robust. Their downside is that such powerful methods often require high computational capability and experience concerning information extraction.
Afterward, the second step is to build the HI constructor. As briefed in the previous section, the construction of a HI can be roughly divided into two categories: model-based and data-based. Model-based methods focus on generating a mathematical representation that mimics a real-life process. The development of a HI in these studies requires expertise, knowledge about the system’s behavior, the nature of the faults, and the HI-constructing factors. Following this approach, the studies in [
11,
26,
40,
41] investigated the faults with respect to fault-related frequencies, which indicates that the comprehension of the system and fault nature is necessary. Another study in [
42] proposed an effective HI construction method with features manually chosen based on relevance. The aforementioned research and many others have been carried out with expertise in signal processing, and system and fault behavior, which can be troublesome to obtain in more sophisticated scenarios. Moreover, they cannot be adapted to a variation in systems, due to their construction imitating certain real-life processes. Unlike model-based approaches, data-based solutions focus on the nature of the data itself, with less concern for the system or fault nature. Due to their lower complexity and wider application toward different systems and faults, data-based methods have been more favorable in recent years, especially with the rise of artificial intelligence [
43]. Notable mentions in this category are statistical projection [
39,
44,
45], deep learning models [
12,
46,
47,
48], and evolutionary computation [
33,
49], etc. Different studies following these methods have achieved promising results in HI construction for the RUL prognosis task.
To verify the constructed HI, the evaluation process must be performed with suitable metrics. Concerning the HI construction for RUL prognosis, the evaluation can be generally divided into two categories: the investigation of the HI’s intrinsic nature from the construction result (fitness analysis) and the performance of HI in the RUL prognosis tasks. Fitness analysis is often performed with the following metrics: monotonicity [
12,
41] (measurement of the monotonic trend in HI), trendability [
12,
41] (the correlation of HI and time), and scale similarity [
12,
41,
48] (similarity of HI ranges), etc. The purpose of this type of evaluation is to self-reflect the HI properties via low computational complexity without concern of the prognosis task. Furthermore, the second category evaluates HI by its performance in RUL prognosis. This indirect assessment can be performed through the mean absolute error, mean square error, mean absolute deviation, etc. In comparison to the first category, it provides more information about the prognosis task as a whole; however, it requires more computational complexity because the whole prognosis block is added. The proposed method is verified in both categories, with monotonicity and trendability in the first and mean absolute error in the second evaluation.
3. The Proposed Health Indicator Construction
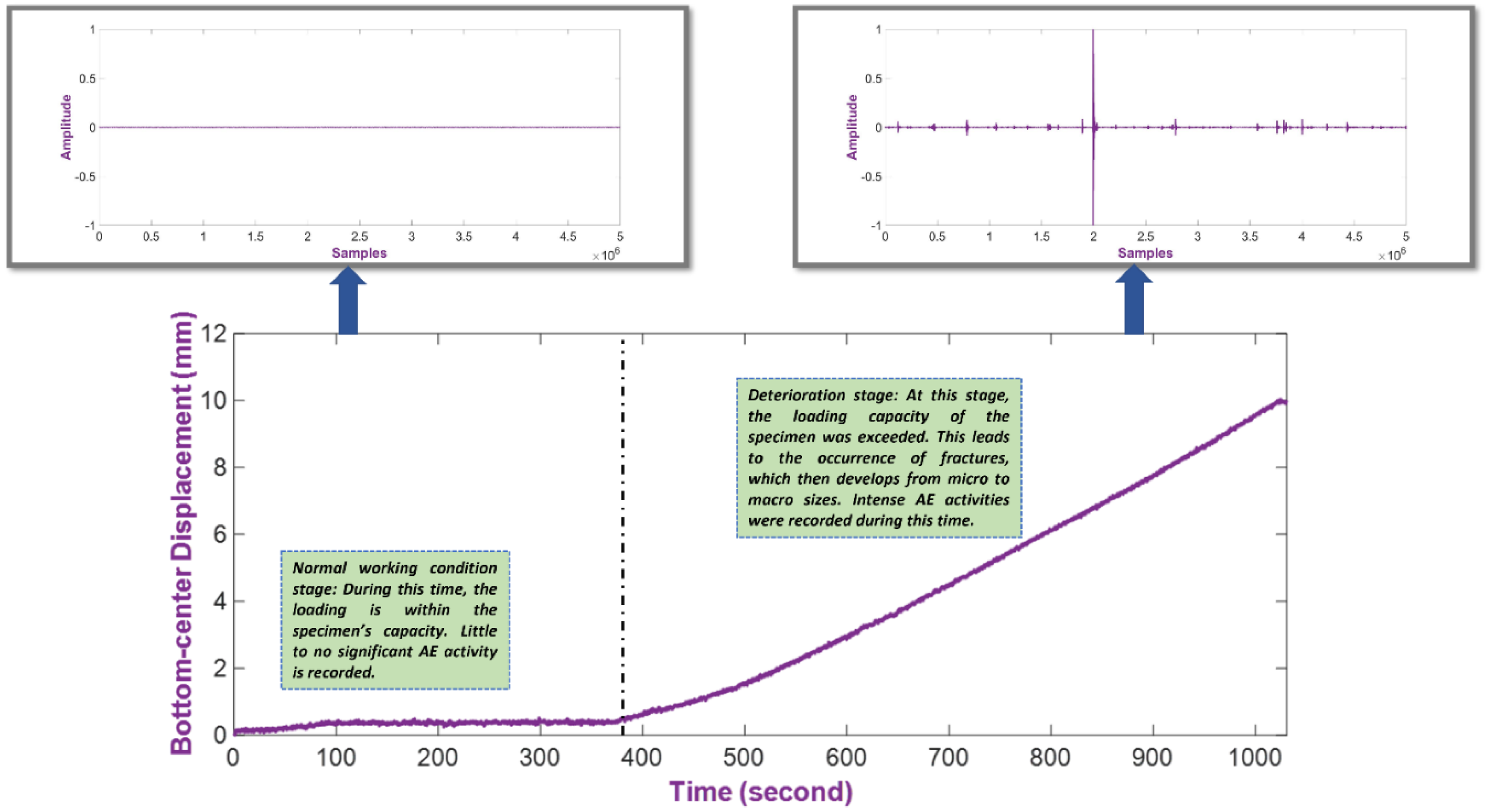
KLD is used to construct the HI to investigate how different an unknown signal is to a known normal condition. As the deterioration progresses during the loading test, it can be expected that the difference of the unknown signal to the reference one grows with the intensity of the AE activity. For that reason, this difference is suitable for the portrayal of the deterioration process from the run-to-failure signals.
Figure 2 shows a loading test’s stages of deterioration and highlights the difference between a reference signal to a signal in which significant AE activities are recorded. The detailed experimental setup and data description are discussed in
Section 4. As shown in
Figure 2, the vertical displacement of the specimen grows steadily during the deterioration stage, which indicates continuous damage being sustained; therefore, it is also evident that significant AE activities occur during this period.
In this study, the signal is segmented into one-second blocks (time steps) for the computations. The HI construction process initiates with the calculation of each run-to-fail signal’s probability distribution. A signal’s values are divided into segments of 1 × 10−3 width ranging from its minimum value to its maxima, at each of which the probability density function (PDF) of the signal is computed. The result of this computation is later utilized for the KLD calculation.
The divergence of two probability measures was originally defined by Harold Jeffreys [
50] in a symmetrized form (directed divergences, also known as the relative entropies in each direction), which is now referred to as the Jeffrey Divergence. Later in the 1950s, Solomon Kullback and Richard Leibler [
51] proposed exploring the mean information discrimination between two hypotheses by their according probability measures using relative entropy in an asymmetric manner. This concept later came to be known as the Kullback–Leibler Divergence. Its first context was developed for information theory and later widely adapted in optimization tasks of machine learning. The value of KLD falls within the range of 0 to 1, which indicates no difference and maximum divergence, respectively. Assuming two probability distributions
and
from the reference normal condition and unknown signal, their KLD calculation is as follows:
It is assumed that all of the run-to-fail signals start at a normal state with little to no significant AE activity recorded during this period. Therefore, a reference normal-conditioned signal can be arbitrarily selected from the very start of the recording.
With the KLD values, the process continues with the establishment of the DNN-based constructor, which outputs HI lines from the inputted signal spectrum. Initially, the signal spectrum is calculated using the fast Fourier transform and then equally separated into 2 × 103 size bands, whose energy can be approximated using the root mean square. By doing such an action, the computation capacity can be reduced for the following operations. Afterward, the pre-training of DNN commences as SAE is fed with the obtained vector of size 2 × 103. The SAE consists of an encoder and a decoder, both comprising three dense layers. The encoder processes the data through layers of diminishing sizes (1000-200-10) in the encoder and then layers of increasing size (200-1000-2000) in the decoder. Xavier initialization and an exponential linear unit activation are harnessed for the encoder. In addition, dropout layers of rate 0.1 are appended before the dense layers for the amelioration of the SAE’s regularization. The training of SAE is executed with the gradient-descent parameter update, Adam optimization, and a 0.1 fraction of masked zeros, along with an unlabeled signal spectrum as both the input and output. Noise is added to the training data, which forces the reconstruction of the noisy input, thus improving the learnt features’ robustness.
Once the SAE’s training concludes, fine-tuning of the DNN follows as the encoder’s layers are utilized as the DNN’s hidden layers, on top of which a logistic regression layer is placed. The calculated KLD value, which falls between the range of [0, 1], is utilized as the output for the DNN training, along with the input of the signal spectrum. In addition to freezing the reused layers for learning ability preservation, early stopping and checkpoint are also used to achieve better parameters. Similar to the KLD, the constructed HI is also within [0, 1], which indicates the damage the specimen has sustained from the least to the most in the severity scale.
4. Experimental Setup and Evaluation
4.1. Experimental Setup
To evaluate the reliability of the proposed method, data were collected from reinforced concrete beams, which were constructed and installed for the four-point bending test scenario. Each specimen was identically produced with concrete material having a compressive strength of 24 MPa, D16 (SD400) steel rebar, and gridded in 50 × 50 mm
2 squares for better visualization of deterioration monitoring. The AE data were acquired at 5 MHz from eight R3I-AST sensors placed around both ends of a specimen. The detailed four-point bending test setup and sensor placement are shown in
Figure 3.
Each specimen was subject to two-point concentrated loading. The loading points were placed 400 mm from the left and right of the specimen’s median, and the stress was applied at a speed of 1 mm/s. In addition, a linear variable differential transformer (LDVT) was set underneath the specimen at its center for vertical displacement measurement. This is an alternate way to track the damage sustained other than the visual monitoring of the specimen’s surface fractures. During the test, the specimens were loaded until the damage was high enough that maintenance was not efficient anymore; however, total collapse was prohibited from happening for the safety of the observers that included our team members and construction field specialists.
Figure 4 shows the damage sustained by a specimen during the test:
Data from three tests, α, β, and γ, were harnessed for this study. Each test was recorded with eight AE sensors with a total of 24 run-to-fail signals. For each test, signals from one side (recorded from four out of eight sensors) were used for the training processes, and the rest for testing. The durations of the tests were 600, 650, and 620 s, respectively.
4.2. Evaluation and Discussion
As aforementioned, the reliability of our proposed method was verified by two evaluations: fitness analysis of the construction result and RUL prognosis performance. In this section, these evaluations are demonstrated in comparison with other methods. The proposed and other HI-constructing factors are visualized in
Figure 5.
In order to analyze the HI construction result, trendability and monotonicity were utilized as the evaluation metrics. In the prognosis tasks, trendability can be perceived as the indicator of a feature’s variation with regard to time. High trendability can be witnessed in linear functions, whereas a constant function represents the minimum trendability. The resulting line of reliable HI construction is expected to be trendable, especially as the specimen progresses closer to its failure. In our study, this metric is computed as:
where
N is the observation number, and
and
are the feature and time index, respectively.
In addition, monotonicity characterizes the underlying decreasing or increasing trend. Its value is in the range of [0, 1], which indicates a higher level of monotonicity as it rises. A good HI result is expected to not possess a low level of monotonicity. The computation of this metric can be performed as follows:
where
N is the observation number.
To verify the fitness of the KLD-based HI, a comparison was made with various HI-constructing factors. The results based on the two metrics are shown in
Table 1.
From what can be witnessed in the table, the AE-hit-based HI and KLD-based HI are comparably outstanding from others in terms of the two concerned metrics. Most of the other HI-constructing factors can show a middle to high trendability (especially Crest Factor with trendability value of 0.7416, which is more than both AE-hit and KLD); however, they are lacking in terms of monotonicity. Such a behavior indicates a poor characterization of the underlying increasing trend toward the end of the specimen’s HI. The KLD HI presents a high level of monotonicity and trendability, especially toward the end of its useful lifetime, as shown in
Figure 5. This is an implication that the use of KLD is suitable for the portrayal of a concrete structure’s deterioration process.
In addition to the fitness analysis of the construction result, the HI was also evaluated by its performance concerning RUL prognosis. A long short-term memory recurrent neural network (LSTM-RNN) [
28] was chosen for this purpose. Because each run-to-fail signal is a sequence of values at the time steps, it can be deemed as a univariate time series. The LSTM-RNN takes in the signals in form of a 50-sample sliding window, which moves one sample at a time, and predicts the 51st sample. By performing such an action, the model is forced to predict not just the final value, but at each window of the signal. In addition, it also enhances the training speed and stabilization by enabling more error gradient. This model contains an input layer, two hidden size-of-20 LSTM layers, and a dense output layer using a linear activation function. Similar to DNN training, early stopping and checkpoint techniques are also used here.
The importance of RUL prognosis increases with time. During the normal working stage with no damage sustained yet, it is inessential to make a prediction. From the moment the specimen enters its deterioration stage, the importance of RUL prognosis grows significantly due to the need of maintenance planning. As a result, we chose two major time steps at 350 and 450 to perform the prediction, which are the first appearance of minor and major fractures, respectively.
Figure 6 displays the HI prediction from the three tests at these time steps.
In our study, the useful lifetime expiration is marked at the first occurrence of 0.95 along the HI line; therefore, the RUL can be calculated as follows:
where
is the time step when the HI reaches 0.95 and
is the time step at which RUL prognosis is being performed. Afterward, an error computation is needed to determine how much the RUL prediction differs from the actual RUL:
where
is the predicted RUL and
is the actual RUL. While this measurement is capable of demonstrating the distance between the predicted and actual RUL, it cannot show which of the predicted and the actual useful life expiration comes first.
The summarized prediction result at two time steps is shown in
Table 2. In addition to the plots shown in
Figure 6, it can be seen that the prediction closely follows the underlying trend of the actual HI, especially with the first two tests. The KLD based HI offers better prediction of the RUL in comparison to AE-hit based methods, with or without anomalous hits removal (AHR), by a significant margin. From the prediction performed at the 350th time step, the average errors are 28, 28, and 36, respectively, in the three tests. On the second prediction, the result is remarkably closer because the test errors are, on average, 11, 18, and 16. It is also worth noting that the KLD based approach does not require adept knowledge of AE phenomena analysis as it does in the AE-hit based approach. The better results using KLD as the HI-constructing factor in comparison to AE hits can be explained by the fact that even though the AE hits have a better description of the AE activities’ nature, it is very difficult to extract the exact number because multiple events are happening at the same time, which leads to overlapping hits in the time domain signal. Through this process of hit detection, useful information can still be neglected, whereas KLD still allows extraction whilst retaining most of the useful information. In addition, the computational complexity is significantly less using KLD because it does not require extensive analysis for the detection threshold, which is of paramount importance in the AE-hit approach. From this test of RUL prognosis and the fitness evaluation, it can be concluded that KLD is reliable as a HI-constructing factor. There is still one problem, which is that, in a few cases, unlike the AE-hit based HI, the prognosis using KLD based HI outputs a result in which the expected useful life expiration comes after the actual date. Even though this is undesirable in the context of prediction, the error is small and will be investigated in future studies.
5. Conclusions
This paper presented an autonomous health indicator (HI) constructor for remaining useful lifetime (RUL) prognosis on concrete structures using Kullback–Leibler Divergence (KLD) with in-service acoustic emission (AE) monitoring. By using a reliable HI for the prognosis task, the user can be warned of future failure and, thus, maintenance can be performed accordingly to minimize safety risks and financial concerns. The process of HI construction was initialized from raw data, which was processed by the Fast Fourier Transform and fed to a constructor to generate the HI. The constructor was a deep neural network (DNN) structure, whose parameters were obtained through pretraining and fine-tuning with a stacked autoencoder (SAE). KLD values of the data were calculated between a reference normal condition and unknown condition in a one-second window, which were then utilized as the training label for the DNN. The KLD was chosen to portray the deterioration of concrete specimens because of its ability to describe how much a signal is different from another. As the deterioration of the concrete specimens worsens, more significant activities can be expected in the AE signal.
Afterward, evaluation of the constructed HI was presented to verify its reliability in the prognosis task for concrete specimens. The evaluation was divided into two categories: fitness analysis of the construction result and RUL prognosis using the constructed HI. Trendability and monotonicity were utilized as the metrics for fitness analysis, which showed a result of 0.68 and 0.69, respectively, comparable to the AE-hit based HI (at 0.68 and 0.68) and significantly better than other compared factors. A comparison was also performed in the RUL prognosis on the proposed HI and AE-hit based HI at two major time steps (350th and 450th) that vaguely marked the initialization of the micro and major fractures on the specimens. In the first prediction, the RUL predictions using three tests’ data were 28, 28, and 36, while in the second, they were 11, 18, and 16, respectively. The result of this comparison presented an outperformance of the proposed HI, especially on the second prediction. Through this evaluation, KLD was concluded as a reliable factor for HI construction.
In future research, the proposed HI construction can be expanded to not just reinforced concrete beams, but also possibly bridges, walls, and buildings, etc. Pre-processing is also expected to provide a better representation of the specimen’s health state. Other optimization techniques and structures will also be investigated in future work to create a better construction model. We will also aim to approach the HI construction from the system- and fault-specific aspect, to which the finite element method (FEM) simulation shall be implemented along with Failure Mode, Effects and Criticality Analysis (FMECA).
Author Contributions
Conceptualization, T.-K.N., Z.A. and J.-M.K.; methodology, T.-K.N., Z.A. and J.-M.K.; validation, T.-K.N., Z.A. and J.-M.K.; formal analysis, T.-K.N., Z.A. and J.-M.K.; resources, T.-K.N., Z.A. and J.-M.K.; writing—original draft preparation, T.-K.N. and Z.A.; writing—review and editing, J.-M.K.; visualization, T.-K.N.; supervision, J.-M.K.; project administration, J.-M.K.; funding acquisition, J.-M.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the 2022 Research Fund of University of Ulsan.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data is available upon request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Abarkane, C.; Rescalvo, F.J.; Donaire-Ávila, J.; Galé-Lamuela, D.; Benavent-Climent, A.; Molina, A.G. Temporal Acoustic Emission Index for Damage Monitoring of RC Structures Subjected to Bidirectional Seismic Loadings. Materials 2019, 12, 2804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aggelis, D.G.; Mpalaskas, A.C.; Matikas, T.E. Investigation of different fracture modes in cement-based materials by acoustic emission. Cem. Concr. Res. 2013, 48, 1–8. [Google Scholar] [CrossRef]
- Flansbjer, M.; Lindqvist, J.E. Meso Mechanical Study of Cracking Process in Concrete Subjected to Tensile Loading. Nord. Concr. Res. 2018, 59, 13–29. [Google Scholar] [CrossRef] [Green Version]
- Ohno, K.; Ohtsu, M. Crack classification in concrete based on acoustic emission. Constr. Build. Mater. 2010, 24, 2339–2346. [Google Scholar] [CrossRef]
- Wolf, J.; Pirskawetz, S.; Zang, A. Detection of crack propagation in concrete with embedded ultrasonic sensors. Eng. Fract. Mech. 2015, 146, 161–171. [Google Scholar] [CrossRef]
- Han, Q.; Yang, G.; Xu, J.; Fu, Z.; Lacidogna, G.; Carpinteri, A. Acoustic emission data analyses based on crumb rubber concrete beam bending tests. Eng. Fract. Mech. 2019, 210, 189–202. [Google Scholar] [CrossRef]
- Ohtsu, M.; Isoda, T.; Tomoda, Y. Acoustic Emission Techniques Standardized for Concrete Structures. J. Acoust. Emiss. 2007, 25, 21–32. [Google Scholar]
- Sagar, R.V.; Prasad, B.K.R.; Kumar, S.S. An experimental study on cracking evolution in concrete and cement mortar by the b-value analysis of acoustic emission technique. Cem. Concr. Res. 2012, 42, 1094–1104. [Google Scholar] [CrossRef]
- Wang, J.; Basheer, P.A.M.; Nanukuttan, S.V.; Long, A.E.; Bai, Y. Influence of service loading and the resulting micro-cracks on chloride resistance of concrete. Constr. Build. Mater. 2016, 108, 56–66. [Google Scholar] [CrossRef] [Green Version]
- Karimipour, A.; Farhangi, V. Effect of EBR- and EBROG-GFRP laminate on the structural performance of corroded reinforced concrete columns subjected to a hysteresis load. Structures 2021, 34, 1525–1544. [Google Scholar] [CrossRef]
- Wang, Y.; Peng, Y.; Zi, Y.; Jin, X.; Tsui, K.L. A Two-Stage Data-Driven-Based Prognostic Approach for Bearing Degradation Problem. IEEE Trans. Ind. Inform. 2016, 12, 924–932. [Google Scholar] [CrossRef]
- Tra, V.; Nguyen, T.K.; Kim, C.H.; Kim, J.M. Health Indicators Construction and Remaining Useful Life Estimation for Concrete Structures Using Deep Neural Networks. Appl. Sci. 2021, 11, 4113. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Shu, T.; Wan, J.; De Silva, C.W.; Wang, Z. A Two-Stage Approach for the Remaining Useful Life Prediction of Bearings Using Deep Neural Networks. IEEE Trans. Ind. Inform. 2019, 15, 3703–3711. [Google Scholar] [CrossRef]
- Aye, S.A.; Heyns, P.S. An integrated Gaussian process regression for prediction of remaining useful life of slow speed bearings based on acoustic emission. Mech. Syst. Signal Process. 2017, 84, 485–498. [Google Scholar] [CrossRef]
- da Costa, P.R.D.O.; Akçay, A.; Zhang, Y.; Kaymak, U. Remaining useful lifetime prediction via deep domain adaptation. Reliab. Eng. Syst. Saf. 2020, 195, 106682. [Google Scholar] [CrossRef] [Green Version]
- Tornede, T.; Tornede, A.; Wever, M.; Hüllermeier, E. Coevolution of remaining useful lifetime estimation pipelines for automated predictive maintenance. In Proceedings of the GECCO 2021: Genetic and Evolutionary Computation Conference, Lille, France, 10–14 July 2021; pp. 368–376. [Google Scholar] [CrossRef]
- Suaris, W.; Fernando, V. Detection of crack growth in concrete from ultrasonic intensity measurements. Mater. Struct. 1987, 20, 214–220. [Google Scholar] [CrossRef]
- Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Early crack detection of reinforced concrete structure using embedded sensors. Sensors 2019, 19, 3879. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Xiong, Z. Crack Detection of Reinforced Concrete Structures Based on BOFDA and FBG Sensors. Shock Vib. 2018, 2018, 6563537. [Google Scholar] [CrossRef]
- Ahmad, Z.; Rai, A.; Maliuk, A.S.; Kim, J.M. Discriminant feature extraction for centrifugal pump fault diagnosis. IEEE Access 2020, 8, 165512–165528. [Google Scholar] [CrossRef]
- Mohan, A.; Poobal, S. Crack detection using image processing: A critical review and analysis. Alex. Eng. J. 2018, 57, 787–798. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, J.Y.; Liu, J.X.; Zhang, Y.; Chen, Z.P.; Li, C.G.; He, K.; Bin Yan, R. Research on Crack Detection Algorithm of the Concrete Bridge Based on Image Processing. Procedia Comput. Sci. 2018, 154, 610–616. [Google Scholar] [CrossRef]
- Bian, C.; Wang, J.-Y.; Guo, J.-Y. Damage mechanism of ultra-high performance fibre reinforced concrete at different stages of direct tensile test based on acoustic emission analysis. Constr. Build. Mater. 2021, 267, 120927. [Google Scholar] [CrossRef]
- Aggelis, D.G. Classification of cracking mode in concrete by acoustic emission parameters. Mech. Res. Commun. 2011, 38, 153–157. [Google Scholar] [CrossRef]
- Moradian, Z.; Li, B.Q. Hit-based acoustic emission monitoring of rock fractures: Challenges and solutions. Springer Proc. Phys. 2017, 179, 357–370. [Google Scholar] [CrossRef]
- Elforjani, M.; Shanbr, S. Prognosis of Bearing Acoustic Emission Signals Using Supervised Machine Learning. IEEE Trans. Ind. Electron. 2018, 65, 5864–5871. [Google Scholar] [CrossRef] [Green Version]
- Moctezuma, F.P.; Prieto, M.D.; Martinez, L.R. Performance analysis of acoustic emission hit detection methods using time features. IEEE Access 2019, 7, 71119–71130. [Google Scholar] [CrossRef]
- Nguyen, T.-K.; Ahmad, Z.; Kim, J.-M. A Scheme with Acoustic Emission Hit Removal for the Remaining Useful Life Prediction of Concrete Structures. Sensors 2021, 21, 7761. [Google Scholar] [CrossRef]
- van Steen, C.; Nasser, H.; Verstrynge, E.; Wevers, M. Acoustic emission source characterisation of chloride-induced corrosion damage in reinforced concrete. Struct. Health Monit. 2022, 21, 1266–1286. [Google Scholar] [CrossRef]
- Song, Z.; Frühwirt, T.; Konietzky, H. Fatigue characteristics of concrete subjected to indirect cyclic tensile loading: Insights from deformation behavior, acoustic emissions and ultrasonic wave propagation. Constr. Build. Mater. 2021, 302, 124386. [Google Scholar] [CrossRef]
- Xargay, H.; Ripani, M.; Folino, P.; Núñez, N.; Caggiano, A. Acoustic emission and damage evolution in steel fiber-reinforced concrete beams under cyclic loading. Constr. Build. Mater. 2021, 274, 121831. [Google Scholar] [CrossRef]
- Miller, R.K.; Hill, E.K.; Moore, P.O. Technical Editors, 3rd ed.; American Society for Nondestructive Testing: Columbus, OH, USA, 2005. [Google Scholar]
- Nguyen, K.T.P.; Medjaher, K. An automated health indicator construction methodology for prognostics based on multi-criteria optimization. ISA Trans. 2021, 113, 81–96. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zi, Y.; Wang, Y.; Yang, Y. Health Indicator Construction Method of Bearings Based on Wasserstein Dual-Domain Adversarial Networks Under Normal Data Only. IEEE Trans. Ind. Electron. 2022, 69, 10615–10624. [Google Scholar] [CrossRef]
- González-Muñiz, A.; Díaz, I.; Cuadrado, A.A.; García-Pérez, D. Health indicator for machine condition monitoring built in the latent space of a deep autoencoder. Reliab. Eng. Syst. Saf. 2022, 224, 108482. [Google Scholar] [CrossRef]
- Wen, P.; Zhao, S.; Chen, S.; Li, Y. A generalized remaining useful life prediction method for complex systems based on composite health indicator. Reliab. Eng. Syst. Saf. 2021, 205, 107241. [Google Scholar] [CrossRef]
- Shukla, S.; Yadav, R.N.; Sharma, J.; Khare, S. Analysis of statistical features for fault detection in ball bearing. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Madurai, India, 10–12 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Mahamad, A.K.; Hiyama, T. Development of artificial neural network based fault diagnosis of induction motor dearing. In Proceedings of the 2008 IEEE 2nd International Power and Energy Conference, Johor Bahru, Malaysia, 1–3 December 2008; pp. 1387–1392. [Google Scholar] [CrossRef]
- Yu, J. Local and Nonlocal Preserving Projection for Bearing Defect Classification and Performance Assessment. IEEE Trans. Ind. Electron. 2012, 59, 2363–2376. [Google Scholar] [CrossRef]
- Leite, V.C.M.N.; Borges Da Silva, J.G.; Veloso, G.F.C.; Borges Da Silva, L.E.; Lambert-Torres, G.; Bonaldi, E.L.; De Lacerda De Oliveira, L.E. Detection of Localized Bearing Faults in Induction Machines by Spectral Kurtosis and Envelope Analysis of Stator Current. IEEE Trans. Ind. Electron. 2015, 62, 1855–1865. [Google Scholar] [CrossRef]
- Duong, B.P.; Khan, S.A.; Shon, D.; Im, K.; Park, J.; Lim, D.-S.; Jang, B.; Kim, J.-M. A Reliable Health Indicator for Fault Prognosis of Bearings. Sensors 2018, 18, 3740. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Gebraeel, N.Z.; Shi, J. A Data-Level Fusion Model for Developing Composite Health Indices for Degradation Modeling and Prognostic Analysis. IEEE Trans. Autom. Sci. Eng. 2013, 10, 652–664. [Google Scholar] [CrossRef]
- Geron, A. Hands-On Machine Learning with Scikit-Learn and TensorFlow, 2nd ed.; O’Reilly Media: Boston, MA, USA, 2019. [Google Scholar]
- Thieullen, A.; Ouladsine, M.; Pinaton, J. A Survey of Health Indicators and Data-Driven Prognosis in Semiconductor Manufacturing Process. IFAC Proc. Vol. 2012, 45, 19–24. [Google Scholar] [CrossRef]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Data-driven prognostic method based on Bayesian approaches for direct remaining useful life prediction. J. Intell. Manuf. 2016, 27, 1037–1048. [Google Scholar] [CrossRef]
- Han, T.; Liu, C.; Yang, W.; Jiang, D. Learning transferable features in deep convolutional neural networks for diagnosing unseen machine conditions. ISA Trans. 2019, 93, 341–353. [Google Scholar] [CrossRef] [PubMed]
- Gugulothu, N.; Vishnu, T.R.; Malhotra, P.; Vig, L.; Agarwal, P.; Shroff, G.M. Predicting Remaining Useful Life using Time Series Embeddings based on Recurrent Neural Networks. arXiv 2017, arXiv:1709.01073. [Google Scholar] [CrossRef]
- Bektas, O.; Jones, J.A.; Sankararaman, S.; Roychoudhury, I.; Goebel, K. A neural network filtering approach for similarity-based remaining useful life estimation. Int. J. Adv. Manuf. Technol. 2019, 101, 87–103. [Google Scholar] [CrossRef] [Green Version]
- Liao, L. Discovering Prognostic Features Using Genetic Programming in Remaining Useful Life Prediction. IEEE Trans. Ind. Electron. 2014, 61, 2464–2472. [Google Scholar] [CrossRef]
- Jeffreys, H. Theory of Probability, 2nd ed.; The Clarendon Press: Oxford, UK, 1948. [Google Scholar]
- Kullback, S.; Leibler, R.A. On Information and Sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}