Assessment of Multi-Scale SMOS and SMAP Soil Moisture Products across the Iberian Peninsula


 ,
,  , , , and
, , , and 
"> Figure 1
<p>CCI land cover map (at 300 m) over the Iberian Peninsula (left) and a close-up of the REMEDHUS area (right). Black dots depict the 20 in situ SSM stations of the REMEDHUS network available for the study period (from April 2015 to December 2017). The distribution of the land cover within the REMEDHUS area is: agriculture, 95.45% (cropland, 75.44%; irrigated, 16.11%; other, 3.90%); forest, 2.70%; grassland, 0.63%; wetland, 0%; settlement, 0.26%; and other, 0.95%.</p> "> Figure 2
<p>Daily evolution of the in situ SSM (black) and the three low-resolution (radiometer-only) SSM (SMAPL2_E, red; SMAPL2, green; and SMOSL3, blue) at three REMEDHUS stations with different land use: (<b>a</b>) J3 (vineyard), (<b>b</b>) K13 (irrigated), and (<b>c</b>) O7 (rainfed/fallow).</p> "> Figure 3
<p>Daily evolution of in situ SSM (black) and the three high-resolution SSM products (SMAP_AP1 at 1 km, red; SMAP_AP3 at 3 km, green; and SMOSL4 at 1 km, blue) after averaging time series of rainfed/fallow stations (F11, H13, J12, J14, K10, M09, and O07) and the pixel time series that contain these stations.</p> "> Figure 4
<p>Temporally-averaged map of daily SMAP (<b>a</b>) and SMOS (<b>b</b>) products at 1 km over the Iberian Peninsula for the period December 2016 to February 2017.</p> "> Figure 5
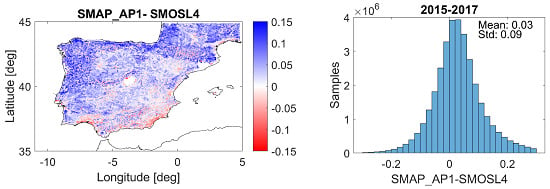
<p>(<b>a</b>) Temporally-averaged map of daily SSM differences between SMAP and SMOS at 1 km (SMAP_AP1 minus SMOSL4) and (<b>b</b>) histogram of daily SSM differences maps, for the period April 2015 to December 2017.</p> "> Figure 6
<p>(First row) The three most common land covers types over the Iberian Peninsula (<b>a</b>), agriculture; (<b>b</b>) forest; and (<b>c</b>), grassland) according to the CCI LC map. (Second row) Histograms of the daily SSM differences (SMAP_AP1 minus SMOSL4) for the respective land covers.</p> "> Figure 7
<p>(<b>a</b>) Temporally averaged map of daily T<sub>B</sub> differences between SMAP (40° incidence angle) and SMOS (42.5° incidence angle) at 25 km and (<b>b</b>) histogram of temporally-averaged daily T<sub>B</sub> differences, for the period April 2015 to December 2017.</p> "> Figure 8
<p>Temporally-averaged map (<b>a</b>) and histogram (<b>b</b>) of daily SMAP SSM differences (SMAP_AP1 at 1 km minus SMAPL2 at 36 km), for the period April 2015 to December 2017.</p> "> Figure 9
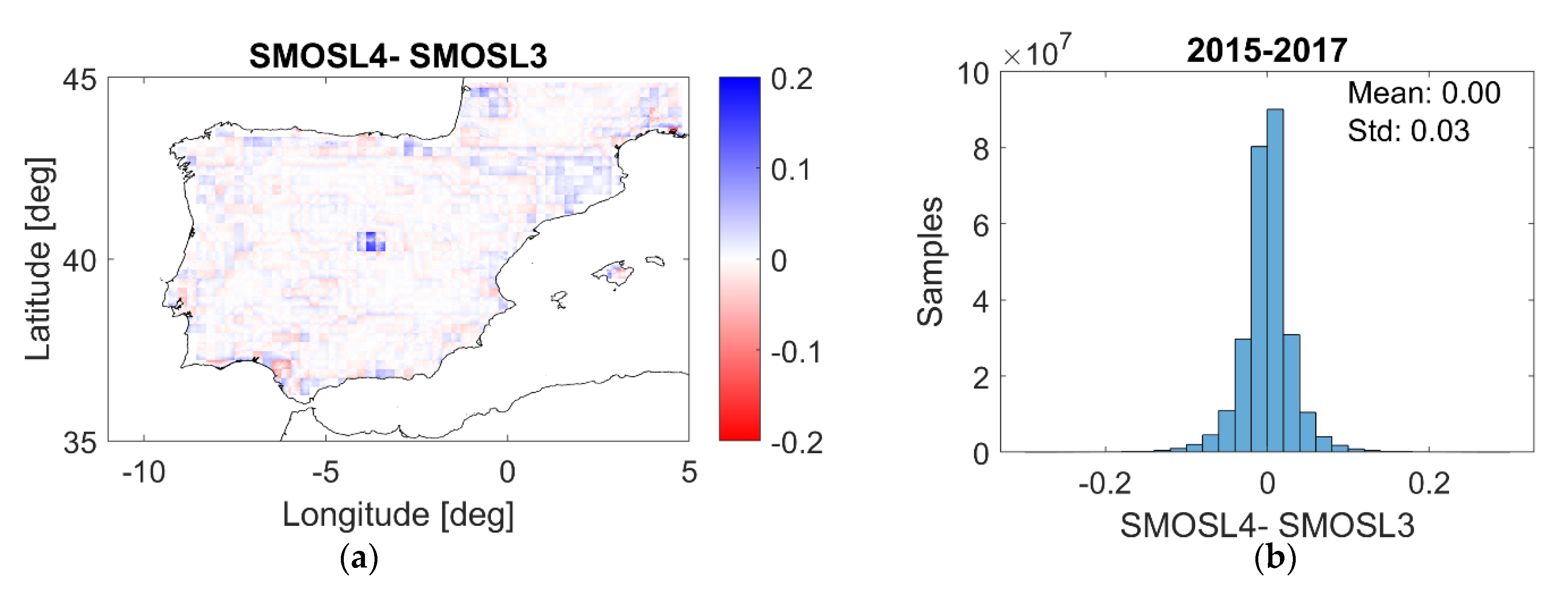
<p>Temporally averaged map (<b>a</b>) and histogram (<b>b</b>) of daily SMOS SSM differences (SMOSL4 at 1 km minus SMOSL3 at 25 km), for the period April 2015 to December 2017.</p> ">
Abstract
:
1. Introduction
2. Data Description
2.1. Soil Moisture Data
2.1.1. NASA SMAP Products
2.1.2. BEC SMOS Products
2.1.3. REMEDHUS Network
2.2. Ancillary Data
Climate Change Initiative: Land Cover
3. Methodology
3.1. Statistical Analysis of SSM Time Series at the Network Scale
3.2. Analysis of the SSM Spatial Patterns
4. Results
4.1. Statistical Analysis of SSM Time Series at the Network Scale
4.2. Analysis of the SSM Spatial Patterns
4.2.1. Comparison of SSM Enhanced Resolution Products
4.2.2. Downscaling Impact on SSM Differences
5. Discussion
6. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lahoz, W.; Blyverket, J.; Hamer, P. Product Validation and Intercomparison Report (PVIR) Revision 3 2018. Available online: https://www.esa-soilmoisture-cci.org/sites/default/files/documents/ESA_CCI_Soil_Moisture_D4.1.2_PVIR_Revision3_v2.6.pdf (accessed on 20 December 2019).
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) Mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Ulaby, F.; Long, D. Microwave Radar and Radiometric Remote Sensing; University of Michigan Library: Lansing, MI, USA, 2014. [Google Scholar]
- Konings, A.G.; Piles, M.; Das, N.; Entekhabi, D. L-band vegetation optical depth and effective scattering albedo estimation from SMAP. Remote Sens. Environ. 2017, 198, 460–470. [Google Scholar] [CrossRef]
- Jackson, T.; Schmugge, T. Vegetation effects on the microwave emission of soils. Remote Sens. Environ. 1991, 36, 203–212. [Google Scholar] [CrossRef]
- Escorihuela, M.J.; Merlin, O.; Stefan, V.; Moyano, G.; Eweys, O.A.; Zribi, M.; Kamara, S.; Benahi, A.S.; Ebbe, M.A.B.; Chihrane, J.; et al. SMOS based high resolution soil moisture estimates for desert locust preventive management. Remote Sens. Appl. Soc. Environ. 2018, 11, 140–150. [Google Scholar]
- Chaparro, D. Surface moisture and temperature trends anticipate drought conditions linked to wildfire activity in the Iberian Peninsula. Eur. J. Remote Sens. 2016, 49, 955–971. [Google Scholar] [CrossRef] [Green Version]
- Chaparro, D.; Vall-Llossera, M.; Piles, M.; Camps, A.; Rüdiger, C.; Riera-Tatché, R. Predicting the Extent of Wildfires Using Remotely Sensed Soil Moisture and Temperature Trends. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2818–2829. [Google Scholar] [CrossRef] [Green Version]
- Chaparro, D.; Vayreda, J.; Vall-Llossera, M.; Banque, M.; Piles, M.; Camps, A.; Martinez-Vilalta, J. The Role of Climatic Anomalies and Soil Moisture in the Decline of Drought-Prone Forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 503–514. [Google Scholar] [CrossRef]
- Sabaghy, S.; Walker, J.P.; Renzullo, L.J.; Jackson, T.J. Spatially enhanced passive microwave derived soil moisture: Capabilities and opportunities. Remote Sens. Environ. 2018, 209, 551–580. [Google Scholar] [CrossRef]
- Peng, J.; Loew, A.; Merlin, O.; Verhoest, N.E.C. A review of spatial downscaling of satellite remotely sensed soil moisture. Rev. Geophys. 2017, 55, 341–366. [Google Scholar] [CrossRef]
- Jagdhuber, T.; Baur, M.; Akbar, R.; Das, N.N.; Link, M.; He, L.; Entekhabi, D. Estimation of active-passive microwave covariation using SMAP and Sentinel-1 data. Remote Sens. Environ. 2019, 225, 458–468. [Google Scholar] [CrossRef]
- Portal, G.; Vall-Llossera, M.; Piles, M.; Camps, A.; Chaparro, D.; Pablos, M.; Rossato, L. A Spatially Consistent Downscaling Approach for SMOS Using an Adaptive Moving Window. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1883–1894. [Google Scholar] [CrossRef]
- Portal, G.; Vall-Llosscra, M.; Piles, M.; Camps, A.; Chaparro, D.; Pablos, M.; Rossato, L.; Aabouch, K. Microwave and Optical Data Fusion for Global Mapping of Soil Moisture at High Resolution. IGARSS 2018 IEEE Int. Geosci. Remote Sens. Symp. 2018, 11, 341–344. [Google Scholar]
- Piles, M.; Entekhabi, D.; Camps, A. A Change Detection Algorithm for Retrieving High-Resolution Soil Moisture From SMAP Radar and Radiometer Observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4125–4131. [Google Scholar] [CrossRef]
- Jagdhuber, T.; Konings, A.G.; McColl, K.A.; Alemohammad, S.H.; Das, N.N.; Montzka, C.; Link, M.; Akbar, R.; Entekhabi, D. Physics-Based Modeling of Active and Passive Microwave Covariations Over Vegetated Surfaces. IEEE Trans. Geosci. Remote Sens. 2019, 57, 788–802. [Google Scholar] [CrossRef]
- Piles, M.; McColl, K.A.; Entekhabi, D.; Das, N.; Pablos, M. Sensitivity of Aquarius Active and Passive Measurements Temporal Covariability to Land Surface Characteristics. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Das, N.N.; Entekhabi, D.; Dunbar, R.S.; Chaubell, M.J.; Colliander, A.; Yueh, S.; Jagdhuber, T.; Chen, F.; Crow, W.; O’Neill, P.E.; et al. The SMAP and Copernicus Sentinel 1A/B microwave active-passive high resolution surface soil moisture product. Remote Sens. Environ. 2019, 233, 111380. [Google Scholar] [CrossRef]
- Carlson, T.N.; Gillies, R.R.; Perry, E.M. A method to make use of thermal infrared temperature and NDVI measurements to infer surface soil water content and fractional vegetation cover. Remote Sens. Rev. 1994, 9, 161–173. [Google Scholar] [CrossRef]
- Piles, M.; Sánchez, N.; Vall-Llossera, M.; Camps, A.; Martínez-Fernández, J.; Martínez, J.; Gonzalez-Gambau, V. A Downscaling Approach for SMOS Land Observations: Evaluation of High-Resolution Soil Moisture Maps Over the Iberian Peninsula. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3845–3857. [Google Scholar] [CrossRef] [Green Version]
- Piles, M.; Petropoulos, G.P.; Sánchez, N.; González-Zamora, Á.; Ireland, G. Towards improved spatio-temporal resolution soil moisture retrievals from the synergy of SMOS and MSG SEVIRI spaceborne observations. Remote Sens. Environ. 2016, 180, 403–417. [Google Scholar] [CrossRef] [Green Version]
- Pablos, M.; Piles, M.; González-Haro, C. BEC SMOS Land Products Description. 2019. Available online: http://bec.icm.csic.es/doc/BEC-SMOS-0002-PD-Land.pdf (accessed on 20 December 2019).
- Entekhabi, D.; Yueh, S.; O’Neill, P.E.; Kellogg, K.H.; Allen, A.; Bindlish, R.; Brown, M.; Chan, S.; Colliander, A.; Crow, W.T.; et al. SMAP Handbook Soil Moisture Active Passive Mapping Soil Moisture and Freeze/Thaw from Space; National Aeronautics and Space Administration: Pasadena, CA, USA, 2014.
- SMAP L2 Radiometer Half-Orbit 36 km EASE-Grid Soil Moisture, Version 6|National Snow and Ice Data Center. Available online: https://nsidc.org/data/SPL2SMP/versions/6 (accessed on 13 October 2019).
- SMAP Enhanced L2 Radiometer Half-Orbit 9 km EASE-Grid Soil Moisture, Version 3|National Snow and Ice Data Center. Available online: https://nsidc.org/data/SPL2SMP_E/versions/3 (accessed on 13 October 2019).
- SMAP/Sentinel-1 L2 Radiometer/Radar 30-Second Scene 3 km EASE-Grid Soil Moisture, Version 2|National Snow and Ice Data Center. Available online: https://nsidc.org/data/SPL2SMAP_S/versions/2 (accessed on 13 October 2019).
- Chan, S. Level 2 Passive Soil Moisture Product Specification Document. 2019. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/D72547%20SMAP%20L2_SM_P%20PSD%20Version%205.1.pdf (accessed on 20 December 2019).
- Chan, S.; Njoku, E.; Colliander, A. Algorithm Theoretical Basis Document Level 1C Radiometer Data Product; 2014. Available online: https://smap.jpl.nasa.gov/system/internal_resources/details/original/279_L1C_TB_ATBD_RevA_web.pdf (accessed on 20 December 2019).
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Rodriguez-Fernandez, N.; Wigneron, J.P.; Al-Yaari, A.; Al Bitar, A.; Albergel, C.; Calvet, J.-C. Evaluation of SMOS, SMAP, ASCAT and Sentinel-1 Soil Moisture Products at Sites in Southwestern France. Remote Sens. 2018, 10, 569. [Google Scholar] [CrossRef] [Green Version]
- Chan, S. Enhanced Level 2 Passive Soil Moisture Product Specification Document. 2019. Available online: https://nsidc.org/sites/nsidc.org/files/technical-references/D56291%20SMAP%20L2_SM_P_E%20PSD%20Version%202.1.pdf (accessed on 20 December 2019).
- Jagdhuber, T.; Entekhabi, D.; Das, N.; Link, M.; Montzka, C.; Kim, S.; Yueh, S. Microwave covariation modeling and retrieval for the dual-frequency active-passive combination of sentinel-1 and SMAP. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 3996–3999. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.-J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements ofthe Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Kerr, Y.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Bircher, S.; Mahmoodi, A.; Mialon, A.; Richaume, P.; et al. Overview of SMOS performance in terms of global soil moisture monitoring after six years in operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- SMOS—eoPortal Directory—Satellite Missions. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/s/smos (accessed on 3 September 2019).
- Barcelona Expert Center|Remote Sensing Research, Data Distribution and Visualization Services. Available online: http://bec.icm.csic.es/ (accessed on 19 January 2020).
- International Soil Moisture Network. Available online: https://ismn.geo.tuwien.ac.at/en/data-access/ (accessed on 19 January 2020).
- Sanchez, N.; Perez-Gutierrez, C.; Martinez-Fernandez, J.; Scaini, A. Validation of the SMOS L2 Soil Moisture Data in the REMEDHUS Network (Spain). IEEE Trans. Geosci. Remote Sens. 2012, 50, 1602–1611. [Google Scholar] [CrossRef]
- Pablos, M.; Martínez-Fernández, J.; Piles, M.; Sánchez, N.; Vall-Llossera, M.; Camps, A. Multi-Temporal Evaluation of Soil Moisture and Land Surface Temperature Dynamics Using in Situ and Satellite Observations. Remote Sens. 2016, 8, 587. [Google Scholar] [CrossRef] [Green Version]
- ESA/CCI Viewer. Available online: https://maps.elie.ucl.ac.be/CCI/viewer/ (accessed on 20 December 2019).
- Objective|ESA Climate Change Initiative. Available online: http://cci.esa.int/objective (accessed on 20 December 2019).
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W.T. Performance Metrics for Soil Moisture Retrievals and Application Requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Davenport, I.; Fernandez-Galvez, J.; Gurney, R. A sensitivity analysis of soil moisture retrieval from the tau-omega microwave emission model. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1304–1316. [Google Scholar] [CrossRef]
- Cosh, M.H.; Jackson, T.J.; Bindlish, R.; Prueger, J.H. Watershed scale temporal and spatial stability of soil moisture and its role in validating satellite estimates. Remote Sens. Environ. 2004, 92, 427–435. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, K.; Qin, J.; Cui, Q.; Lu, H.; La, Z.; Han, M.; Tang, W. Evaluation of SMAP, SMOS, and AMSR2 soil moisture retrievals against observations from two networks on the Tibetan Plateau. J. Geophys. Res. Atmos. 2017, 122, 5780–5792. [Google Scholar] [CrossRef]
- Burgin, M.S.; Colliander, A.; Njoku, E.G.; Chan, S.K.; Cabot, F.; Kerr, Y.H.; Bindlish, R.; Jackson, T.J.; Entekhabi, D.; Yueh, S.H. A Comparative Study of the SMAP Passive Soil Moisture Product With Existing Satellite-Based Soil Moisture Products. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2959–2971. [Google Scholar] [CrossRef]
- Kim, S. Soil Moisture Active Passive (SMAP)—Ancillary Data Report (Landcover Classification); 2013. Available online: https://smap.jpl.nasa.gov/system/internal_resources/details/original/284_042_landcover.pdf (accessed on 20 December 2019).
- Faroux, S.; Tchuenté, A.T.K.; Roujean, J.-L.; Masson, V.; Martin, E.; Le Moigne, P. ECOCLIMAP-II/Europe: A twofold database of ecosystems and surface parameters at 1 km resolution based on satellite information for use in land surface, meteorological and climate models. Geosci. Model. Dev. 2013, 6, 563–582. [Google Scholar] [CrossRef] [Green Version]
- Merlin, O.; Malbéteau, Y.; Notfi, Y.; Bacon, S.; Khabba, S.E.-R.S.; Jarlan, L.; Er-Raki, S.; Khabba, S. Performance Metrics for Soil Moisture Downscaling Methods: Application to DISPATCH Data in Central Morocco. Remote Sens. 2015, 7, 3783–3807. [Google Scholar] [CrossRef] [Green Version]
- Qin, J.; Yang, K.; Lu, N.; Chen, Y.; Zhao, L.; Han, M. Spatial upscaling of in-situ soil moisture measurements based on MODIS-derived apparent thermal inertia. Remote Sens. Environ. 2013, 138, 1–9. [Google Scholar] [CrossRef]
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; De Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling sparse ground-based soil moisture observations for the validation of coarse-resolution satellite soil moisture products. Rev. Geophys. 2012, 50, 50. [Google Scholar] [CrossRef] [Green Version]
- Baur, M.; Jagdhuber, T.; Link, M.; Piles, M.; Akbar, R.; Entekhabi, D. Multi-Frequency Estimation of Canopy Penetration Depths from SMAP/AMSR2 Radiometer and Icesat Lidar Data. IGARSS 2018 IEEE Int. Geosci. Remote Sens. Symp. 2018, 365–368. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Acronym | Grid | Availability |
|---|---|---|---|
| BEC | |||
| SMOS L3 | SMOSL3 | 25 km | 3-day |
| SMOS/ERA5 | SMOSL4 | 1 km | 3-day |
| NASA | |||
| SMAP L2 Radiometer | SMAPL2 | 36 km | 3-day |
| SMAP Enhanced L2 Radiometer | SMAPL2_E | 9 km | 3-day |
| SMAP/Sentinel-1 L2 Radiometer/Radar | SMAP_AP3 | 3 km | 12-day |
| SMAP/Sentinel-1 L2 Radiometer/Radar | SMAP_AP1 | 1 km | 12-day |
| REMEDHUS | |||
| In situ SSM | Point | Hourly | |
| Ancillary Data | |||
| Land Cover | LC | 300 m | 1-year |
| H13 | H9 | J3 | K13 | N9 | O7 | F11 | J12 | J14 | K10 | M9 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 2015 | F | FP | V | I | R | R | R | R | R | R | R |
| 2016 | F | FP | V | I | R | F | F | F | F | F | F |
| 2017 | F | FP | V | I | R | R | R | R | R | R | R |
| In situ vs. SMAPL2_E | In situ vs. SMAPL2 | In situ vs. SMOSL3 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | |
| H13 | 540 | 0.83 | 0.052 | 0.044 | −0.028 | 492 | 0.83 | 0.056 | 0.044 | −0.035 | 497 | 0.80 | 0.086 | 0.052 | −0.068 |
| H09 | 524 | 0.64 | 0.136 | 0.075 | −0.114 | 506 | 0.62 | 0.137 | 0.077 | −0.113 | 504 | 0.58 | 0.167 | 0.081 | −0.146 |
| J03 | 550 | 0.85 | 0.115 | 0.046 | 0.106 | 537 | 0.85 | 0.112 | 0.045 | 0.103 | 516 | 0.73 | 0.075 | 0.048 | 0.057 |
| K13 | 502 | 0.46 | 0.166 | 0.086 | −0.142 | 483 | 0.48 | 0.167 | 0.086 | −0.143 | 510 | 0.46 | 0.201 | 0.083 | −0.183 |
| N09 | 502 | 0.67 | 0.087 | 0.052 | −0.069 | 536 | 0.65 | 0.076 | 0.055 | −0.052 | 512 | 0.60 | 0.117 | 0.057 | −0.102 |
| O07 | 490 | 0.79 | 0.048 | 0.038 | 0.030 | 486 | 0.79 | 0.047 | 0.038 | 0.027 | 510 | 0.70 | 0.048 | 0.048 | 0.004 |
| J3 (Vineyard) | K13 (Irrigated) | O7 (Rainfed/Fallow) | ||||
|---|---|---|---|---|---|---|
| Rainfed (%) | Irrigated (%) | Rainfed (%) | Irrigated (%) | Rainfed (%) | Irrigated (%) | |
| SMAPL2 (36 km) | 67.81 | 20.83 | 80.27 | 17.26 | 67.97 | 24.68 |
| SMOSL3 (25 km) | 61.06 | 30.51 | 92.54 | 6.47 | 61.06 | 30.51 |
| SMAPL2_E (9 km) | 39.71 | 52.16 | 93.08 | 6.66 | 68.69 | 23.27 |
| SMAP_AP3 (3 km) | 43.80 | 42.98 | 79.55 | 20.45 | 66.94 | 33.06 |
| SMOSL4 (1 km) | 56.25 | 43.75 | 68.75 | 31.25 | 75.00 | 25.00 |
| In Situ vs. SMAP_AP1 | In Situ vs. SMAP_AP3 | In Situ vs. SMOSL4 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | |
| H13 | 100 | 0.81 | 0.062 | 0.040 | −0.048 | 100 | 0.86 | 0.046 | 0.038 | −0.025 | 489 | 0.80 | 0.089 | 0.045 | −0.076 |
| H09 | 96 | 0.56 | 0.164 | 0.086 | −0.139 | 96 | 0.60 | 0.155 | 0.084 | −0.131 | 443 | 0.59 | 0.175 | 0.079 | −0.156 |
| J03 | 98 | 0.70 | 0.093 | 0.046 | 0.081 | 98 | 0.83 | 0.121 | 0.043 | 0.114 | 513 | 0.72 | 0.085 | 0.054 | 0.066 |
| K13 | 97 | 0.45 | 0.172 | 0.097 | −0.142 | 97 | 0.51 | 0.156 | 0.088 | −0.129 | 493 | 0.42 | 0.205 | 0.085 | −0.186 |
| N09 | 101 | 0.45 | 0.120 | 0.071 | −0.097 | 101 | 0.57 | 0.101 | 0.058 | −0.082 | 503 | 0.63 | 0.119 | 0.056 | −0.105 |
| O07 | 98 | 0.66 | 0.076 | 0.063 | 0.042 | 99 | 0.78 | 0.076 | 0.050 | 0.056 | 501 | 0.71 | 0.047 | 0.047 | −0.001 |
| In situ vs. SMAP_AP1 | In situ vs. SMAP_AP3 | In situ vs. SMOSL4 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | N [-] | R [-] | RMSE [m3m−3] | uRMSE [m3m−3] | Bias [m3m−3] | |
| DJF | 17 | 0.87 | 0.056 | 0.053 | 0.018 | 17 | 0.92 | 0.060 | 0.048 | 0.035 | 88 | 0.87 | 0.056 | 0.047 | −0.031 |
| MAM | 22 | 0.91 | 0.037 | 0.033 | −0.017 | 22 | 0.90 | 0.027 | 0.026 | −0.008 | 119 | 0.72 | 0.071 | 0.041 | −0.058 |
| JJA | 26 | 0.62 | 0.037 | 0.035 | −0.012 | 27 | 0.64 | 0.035 | 0.035 | −0.006 | 128 | 0.65 | 0.073 | 0.030 | −0.067 |
| SON | 33 | 0.85 | 0.034 | 0.033 | 0.008 | 33 | 0.86 | 0.034 | 0.032 | 0.011 | 125 | 0.78 | 0.052 | 0.041 | −0.032 |
| ESP | 98 | 0.86 | 0.040 | 0.040 | −0.002 | 99 | 0.87 | 0.039 | 0.038 | 0.006 | 460 | 0.82 | 0.064 | 0.043 | −0.048 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Portal, G.; Jagdhuber, T.; Vall-llossera, M.; Camps, A.; Pablos, M.; Entekhabi, D.; Piles, M. Assessment of Multi-Scale SMOS and SMAP Soil Moisture Products across the Iberian Peninsula. Remote Sens. 2020, 12, 570. https://doi.org/10.3390/rs12030570
Portal G, Jagdhuber T, Vall-llossera M, Camps A, Pablos M, Entekhabi D, Piles M. Assessment of Multi-Scale SMOS and SMAP Soil Moisture Products across the Iberian Peninsula. Remote Sensing. 2020; 12(3):570. https://doi.org/10.3390/rs12030570
Chicago/Turabian StylePortal, Gerard, Thomas Jagdhuber, Mercè Vall-llossera, Adriano Camps, Miriam Pablos, Dara Entekhabi, and Maria Piles. 2020. "Assessment of Multi-Scale SMOS and SMAP Soil Moisture Products across the Iberian Peninsula" Remote Sensing 12, no. 3: 570. https://doi.org/10.3390/rs12030570