TESLA Report 2003-09
Tomasz Czarski, Ryszard Romaniuk, Krzysztof Pozjniak,
Warsaw ELHEP Group
ISE, Warsaw University of Technology
TESLA, DESY, Hamburg
Cavity Control System Models’ Simulations
For TESLA Linear Accelerator
ABSTRACT
The fundamental knowledge contained in the previous paper “Cavity Control System Essential Modeling for TESLA
Linear Accelerator” is applied for Matlabs’ Simulink implementation of the basic models for the cavity resonator.
Elementary simulations of the cavity behavior are carried out and some experimental results for signals and power
considerations are presented.
1. INTRODUCTION
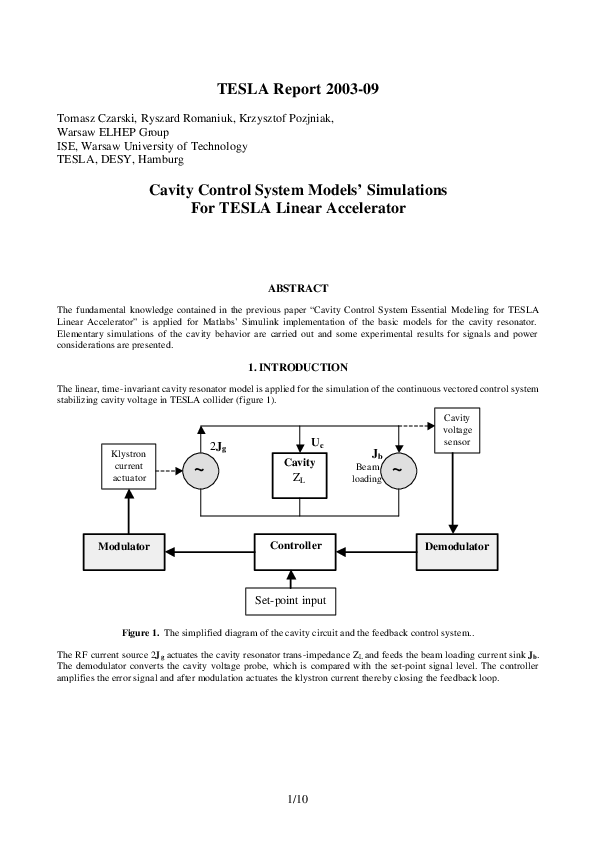
The linear, time-invariant cavity resonator model is applied for the simulation of the continuous vectored control system
stabilizing cavity voltage in TESLA collider (figure 1).
Klystron
current
actuator
Modulator
Uc
2Jg
~
Cavity
ZL
Controller
Cavity
voltage
sensor
Jb
Beam
loading
~
Demodulator
Set-point input
Figure 1. The simplified diagram of the cavity circuit and the feedback control system..
The RF current source 2J g actuates the cavity resonator trans-impedance ZL and feeds the beam loading current sink J b.
The demodulator converts the cavity voltage probe, which is compared with the set-point signal level. The controller
amplifies the error signal and after modulation actuates the klystron current thereby closing the feedback loop.
1/10
�The essential modeling of the system is based on the analytical signal idea. According to the generator’s constant
frequency and due to a narrow resonator bandwidth, the cavity current and voltage signal is modeled as a generalized
oscillation with its p/2 shifted Hilbert transform. After complex demodulation the low level frequency components inphase (I) and quadrature (Q) are detected and are used for controllers’ converting. Then after complex modulation the
analytical signal again actuates the cavity. The complex cavity model relies on the fact that the parallel cavity linear
transformation preserves the analytical signal for generalized oscillation, which can be used for demodulation. Double
cavity model is implemented for a vector as well as for a phasor (in complex domain) representation of the analytical
signal. However due to practical reasons: computation errors and long simulation time, it is implemented for the
relatively high level signal and reasonably lower generator frequency.
The complex cavity representation can be effectively simplified for signals with a narrow spectral range relative to the
generator frequency close to cavity resonance pulsation. Composing modulation, cavity narrow bandwidth
transformation and demodulation yields the approximated direct relation between input and output in-phase, quadrature
components. Thus the resultant simple state space equation depends on the cavity bandwidth and detuning only.
2. MATLAB’S SIMULINK IMPLEMETATION of CAVITY CONTROL SYSTEM MODELS.
2.1 Vector representation for complex cavity system.
The model of cavity control system applying the vector representation is composed in Simulink according to figure 2.
Figure 2. The vector implementation of the complex cavity model.
The parallel double cavity resonators transform the current analytical signal according to its LCR circuit transfer
function. The vector demodulation converts the voltage signal to the in-phase and quadrature components. The
controller matrix gain compares the signal with the required set-point signal level and amplifies the error. The vector
2/10
�modulator creates the analytical signal according to the generator frequency (1MHz). The beam loading current sink
subtracts its two mutually p/2 shifted pulsed structures components and the resultant current vector actuates the cavity.
The beam loading is simulated by the pulse generator with the period of 10 µs and the width 1% of the period. The
analytical signal is created only for the generator frequency Fourier component. This approximation is quite sufficient
and the results for the cavity voltage response are illustrated in figure 3. As an example of the cavity behavior it is
driven by the step signal on the resonance condition (detuning = 0) in the open loop mode. When the cavity field has
reached half of its maximum (no reflection) the appropriate beam loading current is injected resulting in so called
flattop operation.
Figure 3. Cavity voltage response for step input signal and delayed beam loading current.
2.1 Phasor representation for complex cavity system.
The model of the cavity control system applying the phasor representation is composed according to figure 2.
3/10
�Figure 4. The phasor implementation of the complex cavity model.
The complex cavity resonator transforms the analytical signal, which subsequently is demodulated to the phasor
representation of the in-phase and quadrature components. The controller matrix gain compares the signal with the
reference phasor and amplifies the error. The phasor modulator creates again the analytical signal, which loaded by the
beam actuates the cavity. The beam loading is represented as the analytical signal for the generator frequency Fourier
component only. As an example of the cavity behavior it is driven on three different resonance conditions in the open
loop mode by step input, delayed beam loading and then turning off both signals (figure 5).
4/10
�Figure 5. Cavity voltage response on resonance for frequencies: 1 MHz (cyan), 10 kHz (blue), 1 kHz (black) .
2.3 Control system implementation for state space cavity representation.
The model of the cavity control system applying the state space representation is composed according to figure 2.
Figure 6. The state space model implementation for the cavity control system.
5/10
�The cavity is represented by its state space equation, which directly transforms the in-phase and quadrature signal
components. The extracted beam loading current is related to its generator’s frequency component, which equals double
value of the average current. The set-point input delivers the required signal level, which is compared to the actual
cavity voltage. The proportional controller amplifies the signal error and closes the feedback loop. As an example of the
cavity behavior it is driven on the resonance condition in the open loop mode by the step input signal (figure 7).
Figure 7. Cavity voltage response and power monitoring for step input signal.
3. EXPERIMENTAL RESULTS OF SIMULATION.
For the simulation purpose the only common “driving” Matlabs’ m.file is used to control three models implemented by
the Simulink Toolbox. The main parameters of the models are available from this file and are combined in the table
below.
CAVITY parameters
BW = 215;
SET-POINT parameters
bandwith [Hz]
A = 1;
signal relative amplitude
det = 0;
detuning [rad/s]
v = 1/BW;
time constant for filling [s]
R = 1.5625;
load resistance [Gom]
T = 1.3e-3;
pulse time [s]
del = 1e -6;
waveguide delay [s]
ph= 0;
phase of cavity voltage
FEEDBACK parameters
BEAM parameters
loop = 0;
open - loop = 0; closed - loop = 1
Beam = 8;
beam current value [mA]
k = 100;
gain
B_D = log(2)*v;
beam delay time [s]
lat = 4e -6;
controller latency [s]
6/10
�The three colored (red, blue, black) graphs comparison for three implemented models of the cavity system shows
practically no visual difference of the cavity responses. As an example of the cavity behavior it is driven on resonance
for three models by step input, delayed beam loading and then turning off both signals (figure 8) .
Figure 8. Cavity models responses in open and closed loop mode and power monitoring for open loop mode.
In the real operational condition the cavity system is driven in feedback mode according to its natural open loop
response (figure 8). During the first stage of the operation the cavity is filled with constant forward power resulting in
an exponential increase of the electromagnetic field. When transmitted power has reached the value of the forward
power (no reflection) the beam loading current is injected resulting the steady-state flattop operation. Turning off both
generator and beam current yields an exponential decay of the cavity field.
The main reason of the cavity voltage destabilization is the resonance frequency changing caused by micrphonics and
Lorentz force detuning. The detuning influence on the cavity behavior in the open loop mode is shown in figures 9, 10.
[ MV ]
[ MV ]
Figure 9. Cavity voltage step response for different detuning.
7/10
�[ MV ]
[ MV ]
Figure 10. Cavity voltage I/Q graph and power monitoring for different detuning.
The feedback system stabilizes the cavity voltage at the expense of an additional forward power. The efficiency of the
proportional controller during the operational condition for different gains at the constant detuning is shown in figure11.
[ MV ]
Figure 11. Cavity amplitude response and power monitoring for different controller gains (detuning = 400 Hz).
8/10
�A high enough controller gain stabilizes the cavity voltage but the larger detuning the more power is required (fig. 12).
Power monitoring [kW]
400
400 Hz
350
Phase of signal [rad]
1.8
1.6
forward power
400 Hz
1.4
300
300 Hz
1.2
300 Hz
Phase [rad]
power [kW]
250
200 Hz
200
detuning=0 Hz
1
0.8
150
0.6
transmitted power
200 Hz
100
0.4
50
0
0.2
0
0.5
1
time [s]
0
1.5
x 10
-3
detuning=0 Hz
0
0.5
1
time [s]
1.5
2
x 10
-3
Figure 12. Cavity power monitoring for different detuning (gain = 100) and phase shift during field decay.
The high controller gain for the better accuracy and fast response of the cavity field is limited by the stability of the
feedback system. The loop phase shift is the reason of the potential instability. The time delays caused by the waveguide and the digital controller latency are important contributions to the phase shift in the closed loop of the feedback
system. The detuned cavity behavior for different loop delays at the constant controller gain shows figure 13.
Delay
1 µs
3 µs
5 µs
Figure 13. Cavity step response and I/Q graph for different loop delays (detuning =400Hz, controller gain = 200).
9/10
�The detuned cavity behavior for different controller gains at the constant loop delay is shown in figure 14.
Gain
50
100
200
Figure 14. Cavity step response and I/Q graph for different gains (detuning =400Hz, loop delay = 4 µs).
4. CONCLUSION.
Using three models implemented in Matlabs’ Simulink Toolbox carries out the elementary simulations of the cavity
resonator behavior. The approximate state space representation of the cavity control system is simple and useful for
quite a satisfactory initial analysis of the system. The control feedback is very efficient to stabilize the detuned cavity
voltage. However an additional forward power is necessary to obtain an accurate and fast cavity response. The
controller gain is limited by the system instability mainly caused by the loop delay. In TESLA accelerator the auxiliary
adaptive feed forward is applied to compensate the repetitive perturbations induced by the beam loading and dynamic
Lorentz force detuning.
The linear time-invariant cavity model is the first approximation of the resonator behavior. The next one should take
into account the time-variant Lorentz force detuning during pulse operation and pass-band modes of the cavity. The
design of a fast and efficient digital feedback controller is a challenging task and it is an important contribution to the
optimization of TESLA accelerator.
REFERENCES
1. T. Schilcher, “Vector Sum Control of Pulsed Accelerating Fields in Lorentz Force Detuned Superconducting
Cavities”, Hamburg, August 1998.
2. T. Czarski, S. Simrock, K. Pozniak, R. Romaniuk “Cavity Control System Essential Modeling For TESLA
Linear Accelerator”. Nov. 2002
3. W. Zabolotny, R. Romaniuk, K. Pozniak ......
“Design and Simulation of FPGA Implementation of RF Control System for Tesla Test Facility”. Warsaw
University of Technology, Nov.2002.
This paper was published in Proc. SPIE, vol. 5125
10/10
�
 R. Romaniuk
R. Romaniuk