Monte-Carlo Go Reinforcement Learning Experiments
Bruno Bouzy
Université René Descartes
UFR de mathématiques et d’informatique
C.R.I.P.5
45, rue des Saints-Pères
75270 Paris Cedex 06, France
bouzy@math-info.univ-paris5.fr
Abstract— This paper describes experiments using reinforcement learning techniques to compute pattern urgencies used
during simulations performed in a Monte-Carlo Go architecture. Currently, Monte-Carlo is a popular technique for
computer Go. In a previous study, Monte-Carlo was associated
with domain-dependent knowledge in the Go-playing program
Indigo. In 2003, a 3x3 pattern database was built manually.
This paper explores the possibility of using reinforcement
learning to automatically tune the 3x3 pattern urgencies. On
9x9 boards, within the Monte-Carlo architecture of Indigo, the
result obtained by our automatic learning experiments is better
than the manual method by a 3-point margin on average, which
is satisfactory. Although the current results are promising on
19x19 boards, obtaining strictly positive results with such a
large size remains to be done.
Keywords: Computer Go, Monte-Carlo, Reinforcement
Learning
I. I NTRODUCTION
This paper presents a study using Reinforcement Learning
(RL) to automatically compute urgencies of moves played
within random games in a Monte-Carlo (MC) Go framework.
This study has three important features. First, although based
on the RL theory [1], [2], [3], [4], it is mainly empirical: it is
made up of three experiments, each of them being performed
in the light brought by the previous one. Second, the last
experiment presented here still broadened our understanding
of the problem. Consequently, this work is not completed:
the results achieved are promising but still below our initial
ambitions. Third, this work is based on a particular architecture: the MC Go architecture of our Go playing program
Indigo [5]: the performed experiments aim at improving the
playing level of this program. Nevertheless, based on these
three features, the goal of this paper is to show how RL
contributes to the improvement of a MC Go playing program.
To this end, setting up the background of this work is
necessary: section II briefly presents the state of the art of
computer Go, and the point reached by Indigo project, then
section III presents the MC Go architecture which can be
either pure or extended with domain-dependent knowledge.
Then, section IV presents the core of this study: the automatic computing of this domain-dependent knowledge. It
underlines the experimental vocabulary used by section V
that describes the experiments. Finally, section VI sums up
the results and describes the future work.
Guillaume Chaslot
MICC/IKAT University of Maastricht
Faculty of General Sciences
Department of Computer Science
P.O. Box 616, 6200 MD Maastricht
The Netherlands
g.chaslot@cs.unimaas.nl
II. BACKGROUND
A. Computer games
Computer games have witnessed the enhancements done
in AI for the past decade [6], and future improvements are
bound to go on in the next decade [7]. For instance, in 1994,
Chinook beat Marion Tinsley, the Checkers world champion
[8], and Logistello beat the Othello world champion. In
1997, Deep Blue [9] beat Garry Kasparov, the Chess world
champion. In 2006, solving Checkers is nearly achieved [10].
In Othello, Logistello’s playing level is clearly supra-human
[11]. In Chess, the best programs rank on a par with the best
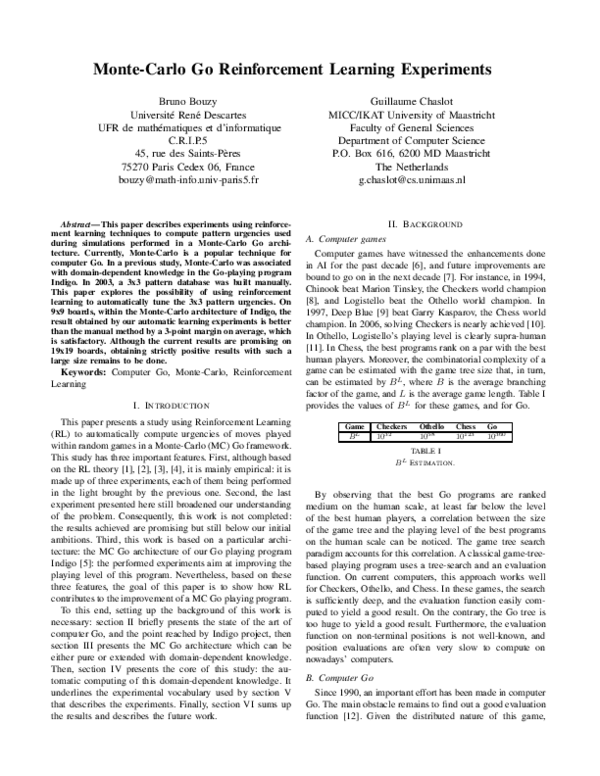
human players. Moreover, the combinatorial complexity of a
game can be estimated with the game tree size that, in turn,
can be estimated by B L , where B is the average branching
factor of the game, and L is the average game length. Table I
provides the values of B L for these games, and for Go.
Game
BL
Checkers
1032
Othello
1058
Chess
10123
Go
10360
TABLE I
B L E STIMATION .
By observing that the best Go programs are ranked
medium on the human scale, at least far below the level
of the best human players, a correlation between the size
of the game tree and the playing level of the best programs
on the human scale can be noticed. The game tree search
paradigm accounts for this correlation. A classical game-treebased playing program uses a tree-search and an evaluation
function. On current computers, this approach works well
for Checkers, Othello, and Chess. In these games, the search
is sufficiently deep, and the evaluation function easily computed to yield a good result. On the contrary, the Go tree is
too huge to yield a good result. Furthermore, the evaluation
function on non-terminal positions is not well-known, and
position evaluations are often very slow to compute on
nowadays’ computers.
B. Computer Go
Since 1990, an important effort has been made in computer
Go. The main obstacle remains to find out a good evaluation
function [12]. Given the distributed nature of this game,
�it was natural to study the breakdown of a position into
sub-parts, and to perform local tree searches using intensive
pattern-matching and knowledge bases [13], [14]. The best
programs are sold on the market: Many Faces of Go [15],
Goemate, Handtalk, Go++ [16], Haruka, KCC Igo. Consequently, the sources of these programs are not available.
In 2002, GNU Go [17], an open source program, became
almost as strong as these programs. Since then, this program
has been used as an example to launch new computer Go
projects. Various academic programs exists : Go Intellect,
Indigo, NeuroGo [18], Explorer [19], GoLois [20], Magog.
Some aspects of these programs are described in scientific
papers: [21] for Go Intellect, [22] for NeuroGo, [23] for
Explorer, [24] for Golois, and [25] for Magog.
C. Indigo project
The Indigo project was launched in 1991 as a PhD
research. Indigo is a Go playing program which has regularly
attended international competitions since 1998. Its main
results are listed below.
• 9th KGS, 19x19, Dec 2005 (Formal: 3rd/7, Open: 1st/9)
• 8th KGS, 9x9, Formal, Nov 2005 (4th/11)
• 7th KGS, 19x19, Open, Oct 2005 (2th/7)
• 2005 WCGC, Tainan, Taiwan, Sept 2005 (6th/7)
• 10th CO, Taipei, Sept 2005 (19x19: 4th/7, 9x9: 3rd/9)
• 9th CO, Ramat-Gan, Jul 2004 (19x19: 3rd/5, 9x9: 4th/9)
• 8th CO, Graz, Nov 2003 (19x19: 5th/11, 9x9: 4th/10)
• Comp. Go Festival, Guyang, China, Oct 2002 (6th/10)
• 21st Century Cup, 2002, Edmonton, Canada (10th/14)
• Mind Sport Olymp. 2000, London, England (5th/6)
• Ing Cup 1999 Shanghai, China (13th/16)
• Ing Cup 1998 London, England (10th/17)
Participating in these events has allowed Indigo to be assessed against various opponents, which brings about keeping
good and efficient methods, and eliminating bad or inefficient
ones. Until 2002, Indigo was a classical Go program: it
used the breakdown approach, and local tree searches with a
large knowledge base. The results improved in 2003, which
corresponds to the integration of MC techniques into Indigo.
The historical vision of the Indigo development shows the
relevance of the MC approach in computer Go. However, the
effect of the knowledge approach must not be overlooked.
Without knowledge, Indigo would be less strong than it is.
III. M ONTE -C ARLO G O
This section presents the MC technique [26] for computer
games, then MC Go as such, without specific knowledge,
lastly MC Go associated with specific knowledge.
A. Monte-Carlo games
Monte-Carlo is appropriate for games containing randomness, for example for Backgammon in which the players
throw dice. In Backgammon, although the best program used
tree search instead simulations during its games, simulations
are used after the games or at learning time [27] to find out
new policies. MC is also adapted to games including hidden
information such as Poker or Scrabble. Poki, one of the best
Poker programs [28], and Maven, the best Scrabble program
[29], perform simulations during their games in order to represent hidden information. For complete information games,
simulations can be appropriate as well. Abramson proposed
a Monte-Carlo model for such games [30]. To obtain the
evaluation of a given position, the basic idea consists in
launching a given number N of random games starting on
this position, scoring the terminal positions, and averaging
all the scores. To choose a move on a given position, the
corresponding idea is the greedy algorithm at depth one. For
each move on the given position, launch a given number N of
random games starting on this position, score the terminal positions, and average all the scores, and finally play the move
with the best mean. The obvious upside of MC is its low
complexity when B and L are high: O(B L ) for tree search,
and O(N BL) for Monte-Carlo. For complete information
games, when the tree is too large for a successful tree search,
simulations allow the program to sample tree sequences
that reach terminal positions meaningful for evaluating the
given position. By averaging the scores, evaluations on nonterminal positions are robust, which is hard to obtain with
classical evalution functions based on knowledge extracted
from human expertise.
B. Basic Monte-Carlo Go
In the early 1990’s, the general MC model by Abramson
was used on games with low complexity such as 6x6 Othello.
However, in 1993, Bernd Brügmann succeeded in developping the first 9x9 MC Go program, Gobble [31]. More
precisely, Gobble was based on simulated annealing [32].
In addition, to make the program work on the computers
available at that time, Brügmann used a heuristic later
called the all-moves-as-first heuristic [33]. Theoretically, this
heuristic enables the process to divide the response time by
the size of the board. In practice on 9x9, it enables the
program to divide the response time by a few dozens, which
is a huge speed-up, and worth considering. After a random
game with a score, instead of updating the mean of the first
move of the random game, the all-moves-as-first heuristic
updates with the score the means of all moves played first
on their intersections with the same color as the first move.
Symmetrically, the all-moves-as-first heuristic updates with
the opposite score the means of all moves played first on their
intersections with a different color from the first move. All in
all, this heuristic updates the mean of almost all the moves as
if they were played first in the random game. Unfortunately,
this heuristic is not completely correct because it may update
with the same score two moves that have different effects
depending on when they are played: before or after a capture
(capture being the basic concept in Go). However, this Gospecific heuristic had to be mentioned.
Since 2002, the MC approach has gained popularity in
the computer Go community, which can be explained bythe
speed of current computers. The standard deviation of random games played on 9x9 boards is roughly 35. If we look
for a one-point precision evaluation, 1,000 games give 68%
of statistical confidence, and 4,000 games 95%. Given that
�10,000 9x9 random games are possible to complete on a
2 GHz computer, then from 2 up to 5 MC evaluations per
second with a sufficient statistical confidence are possible,
and the method actually works in a reasonable time.
Several strategies exist to speed up the MC process. One
of them is progressive pruning [28], [33]. For each move, the
process updates not only the mean of a move but also the
confidence interval around the mean. As soon as the superior
value of the confidence interval of a move is situated below
the inferior value of the confidence interval of the current
best move, the move is pruned. This reduces the response
time significantly. However, this technique is not optimal.
Figure 1 shows how progressive pruning works while time
is running. Another simple strategy to select the first move
of a game consists in choosing the move that has the highest
confidence interval superior value [34]. This move is the most
promising. By updating its mean and its confidence interval,
the confidence interval superior value is generally lowered.
This move can either be confirmed as the best move or
replaced by another promising move. Hence, the best moves
are often updated, and moves are not updated as soon as they
are estimated as not promising. Moreover, the bad moves are
never definitely eliminated from the process.
2
1
3
4
Fig. 1. Progressive pruning: the root is expanded (1). Random games start
on children (2). After several random games, some moves are pruned (3).
After other random games, one move is left, and the process stops (4).
In 2002, our experiments carried out with Bernard Helmstetter, a doctoral student under Tristan Cazenave’s supervision at Paris 8 University, showed that, on 9x9 boards, pure
MC programs ranked on a par with heavily knowledge based
programs such as Indigo2002 [35]. Given the architectural
difference between these programs, that result was amazing.
In fact, MC programs share many good properties. The
first good property is the increasing playing level in the
time used. The more random games, the better the precision
on the means. Nowadays, MC method starts to work for
a quantitative reason mentioned above. In the near future,
with ten times faster computers, the playing strength of
MC programs will increase significantly. For knowledge
based programs, the knowledge either exists or not whatever
the time calculations. For tree search based programs, the
timescale is of importance. Considering the ratio by which
the speed of computers is multiplied, a ratio of ten only
enables tree search programs to look ahead one ply further,
which will not improve their playing level significantly in
the next few years.
The second good property of MC approach is its robust-
ness of evaluation. Whatever the position, the MC evaluation,
far from being totally correct, provides a “good” value.
This property is not shared with human-expertise-extractedknowledge-based programs that can give wrong results on
positions where knowledge is erroneous or missing. Furthermore, the variation between the MC evaluation of a
position and the MC evaluation of one of the child positions
is smooth, which is different in human-expertize-extractedknowledge-based evaluations.
The third good property of MC Go is its global view. The
MC approach does not break down the whole position into
sub-positions, which is a risky approach used in classical Go
programs. When breaking down a position into sub-positions,
the risk is to destroy the problem, and perform local tree
searches on irrelevant sub-problems. In such an approach,
even if the local tree searches are perfect, the global result
is bad as soon as the decomposition is badly performed. MC
avoids such risk because it does not break down the position
into parts. The move selected by MC is globally good in
most cases. Unfortunately, MC programs are tactically bad
because they generally perform global tree search at a very
shallow depth, even on small boards [36].
Lastly, a MC Go program is easy to develop. This feature
may appear unsignificant but it actually brought about the
birth of numerous MC programs over the last three years:
Vegos [37], DumbGo [38], Crazy Stone [39], Go81 [40],
and other programs.
C. Monte-Carlo Go with specific knowledge
In 2003, with both a pure MC program and a knowledgebased program, the association between MC and knowledge
provided a tempting perspective. We associated Go knowledge with MC in two different ways: the easy one, and the
hard one. The easy one consisted in pre-selecting moves
with knowledge, and the hard one consisted in inserting
little knowledge into the random games [41]. Indigo2002
was the perfect candidate to become the pre-selector: instead
of generating the best move, it was specified to generate the
Nselect best moves, that in turn were input of the MC module
as shown in Figure 2.
legal
moves
Pre-selection
module
Nselect
moves
MC
module
chosen
move
Fig. 2. The two modules of Indigo2003: the pre-selection module selects
Nselect moves by the mean of lot of knowledge, and local tree searches,
additionnally yielding a conceptual evaluation of the position. Then, among
the Nselect moves, the MC module selects the move to play by the mean
of random simulations.
This simple addition shortened the response time and
enabled a MC program to play on 19x19. Moreover, the
move pre-selector performing local tree searches could prune
tactically bad moves.
The second way to associate specific knowledge and MC
is, by far, much more interesting because it introduces the
RL experiments described in this paper. Instead of using
�the uniform probability, it consists in using a non-uniform
probability for (pseudo-)random game move generation. This
approach results from the use of domain-dependent knowledge. At this point, a few words have to be defined. While
the term pseudo-random refers to numbers actually generated
by computers, and while the term random refers to the
mathematical property of random variables, we use these
two terms, pseudo-random and random, in a slightly different
meaning: we call random the moves, or the numbers, generated by the rand() function of the computer (intended to
be generated with a probability as uniform as possible), and
we call pseudo-random, the moves generated by our domaindependent approach which uses a non-uniform probability.
The MC idea lies in performing a huge number of times
a simple random episode to deduce a complex behaviour. In
pure MC, the episode was a move sequence respecting the
rules of the game, and the complex behaviour, to some extent,
was a program playing on a par with Indigo2002. What is the
complex behaviour brought about by the episode composed
by a sequence of moves respecting the rules and following
some basic Go principles such as string capture-escape and
cut-connect ?
Concerning the string capture-escape concept, the urgency
of the move filling the last liberty of the one-liberty string is
linear in the string size. Concerning the cut-connect concept,
a pattern representation is adapted. In practice, the question
is to determine the adequate pattern size: large enough to
contain most concept instances, and small enough not to
slow down the random games. The cut-connect concept is not
well described by 2x2 patterns nor by the cross patterns (one
intersection plus its four neighbours), but it is described quite
well by 3x3 patterns (one intersection plus its 8 neighbours).
Larger patterns would give better results, but, concerning the
cut-connect concept, the most urgent patterns are the smallest
ones. Therefore, 3x3 is the proper size to enclose the cutconnect concept. A 3x3 pattern has an empty intersection in
its center, and the 8 neighbouring intersections are arbitrary.
The urgency of a pattern corresponds to the urgency of
playing in its center when this pattern matches the position.
To decide stochastically which move to play during a
random game, each matched pattern and each one-liberty
string bring their urgency to a given intersection. For each
intersection, the urgency to play on it amounts to the sum
of the urgencies brought by patterns and strings. Then, the
probability of playing on a given intersection is linear in its
urgency. From now on, the episodes look like Go games, and
they keep their exploratory property. With a probability based
on domain-dependent knowledge, the means obtained are
more significant than the means using uniform probability.
We are now able to provide the features of a Pseudo-Random
(PR) player :
•
•
•
•
•
3x3 pattern urgency table
38 3x3 pattern (center is empty)
25 dispositions to the edge
#patterns = 250,000
one-liberty urgency
In the following, we call Zero the PR player that uses
a uniform probability. Zero has its urgencies set to zero. It
corresponds to the pure MC Go approach. We call M anual
the PR program based on domain-dependent concepts that
was built in 2003 by a translation of a small 3x3 pattern
database manually filled by a Go expert. We call M C(p) the
MC program that uses the architecture of Figure 2, and that
uses the PR program p in order to carry out its simulations.
In 2003, we made the match between M C(M anual) and
M C(Zero) on 9x9, 13x13 and 19x19 boards [41]. Table II
gives the results.
board size
mean
% wins
9x9
+8
68%
13x13
+40
93%
19x19
+100
97%
TABLE II
R ESULTS OF M C(M anual) VS M C(Zero) FOR THE USUAL BOARD
SIZES .
The results clearly show that using a domain-dependent
probability is superior to using a uniform probability. The
larger the board, the clearer the result. On 19x19 boards,
the difference equals 100 points on average, which is huge
by Go standards. At this stage, it is normal to look for
automatic methods and see whether they can do better than
M C(M anual). This leads us to the core elements of this
paper: how to use RL in an MC Go architecture.
IV. R EINFORCEMENT
LEARNING AND
GO
M ONTE -C ARLO
The general goal is to automatically build a PR player p for
M C(p) as strong as possible. In this paper we explore the use
of RL deeply influenced by Richard Sutton’s work. Sutton is
the author of Temporal Difference (TD) method [3], and with
Barto co-author of a book describing the state of the art [1]
(also described by [2]). RL is also known for the success of
Q-learning [42]. RL often uses the Markov Decision Process
(MDP) formalism: an agent evolves in a non-deterministic
environment. He performs actions according to his own
policy. His actions make him change from state to state, and
result in returns. The aim of the agent is to maximize his
cumulated return in the long term. To this purpose, every
state has a value determined by the state value function V ,
and each action associated to a state has an action value
determined by the action value function Q. The learning
agent either updates action values and state values according
to his policy, or greedily improves his policy depending on
action values and/or state values. RL inherits from Dynamic
Programming (DP) [43] the updating rule for state values
and action values. But RL is different from DP because
sweeping of the state space is replaced by the experience of
the agent. In our work, if RL did not provide better results
than M C(M anual), we would plan to use Evolutionary
Computation (EC) principles [44] in a following stage.
Before the RL experiments, the PR player is M anual.
It uses 3x3 patterns manually built by an expert and by
�means of an automatic translation from a database to a
table. The expert was not be able to build a larger database
easily containing larger patterns and adequate urgencies. If
we wish to enlarge this knowledge, we must use an automatic
method. The playing level of M C(M anual) is quite good,
and it is not easy to find p such as M C(p) be better than
M C(M anual). But if we succeed with 3x3 patterns, we will
be certain that the automatic method produces better results
that the manual method on larger patterns, even if the expert
manually tunes the large database.
Subsequently, we can say that p1 is better than p2 at
the low level, or random level, when p1 beats p2 by a
positive score on average after a sufficient number of games.
We can say that p1 is better than p2 at the high level, or
MC level, when M C(p1 ) beat M C(p2 ) by a positive score
on average after a sufficient number of games. We aim at
seeing the PR players improving at the MC level, and not
necessarily at the low level. Improving a PR player at the
low level can be a red herring. For instance, a PR player
p that is quite good (because he beats Zero at the low
level by a given score) can be improved at the low level
only by making him less exploratory. This determinisation
results in a better score for the PR player p against Zero
but, his exploratory capacity being low, M C(p) may be
weak, and even be beaten by M C(Zero). When considering
the balance between exploration and exploitation [1], we
may draw Figure 3 showing the programs on a randomness
dimension. On the left, there are deterministic and greedy
programs, then, on their right, ǫ-greedy programs that play
randomly in an ǫ proportion, and that play deterministically
in a 1 − ǫ proportion. On the right of Figure 3, there is Zero,
the random program based on the uniform probability, and on
its left the PR programs used in our MC architecture. Those
programs are constrained to keep their exploratory capacity
and to stay on the right of the figure.
Deterministic
Greedy
-greedy
Exploitation
low
temperatures
Pseudorandom
RLPR
Manual
Random
Zero
Exploration
high
temperatures
Fig. 3. The randomness dimension: the completely deterministic programs
are situated on the left. Zero is situated on the right. On the left of Zero,
there are the P R programs and M anual. On the right of deterministic
programs, there are ǫ-greedy programs [1]. The temperature indicates a
randomisation degree: 0 for deterministic programs, and infinite for Zero,
the uniform probability player.
In the following, we call RLP R, a P R player whose table
is built with RL techniques. We may perform experiments at
the low level, or at the MC level. The upside of the low
level is the high speed of games. Its downside is to favour
exploitation against exploration. Despite of its slowness, MC
level remains in keeping with our aim..
V. E XPERIMENTS
This section describes two experiments: one experiment
(experiment 1a) performed at the low level, with one program. This experiment uncovers the obstacle of determinisation during learning. Experiment 1b attempts to solve this
obstacle by replacing the sole program by a population of
programs. Experiment 2 is performed at the MC level with
one single player, and explicitly manages the obstacle of
determinisation.
A. Experiment 1: low level, one program or a population of
programs
This subsection describes an experiment made at the low
level, with one program in self-play or with a population
of programs. The result of a game is either its outcome
(+1 for a win and −1 for loss) or a score. This subsection
assumes that the result used is the outcome. A pattern has an
associated action: playing the advised move when the pattern
is matching. A pattern has an action value Q that is the mean
of the games’ results when the pattern has been matched and
played. Q belongs to ] − 1, +1[. In our experiment, a pattern
has an urgency
� U linked to Q by:
�
k
1+Q
U = 1−Q
During a pseudo-random game, the probability of playing
a move advised by a pattern is linear in U . k is a parameter
corresponding to the determinisation degree of the program.
When k = 0, then U = 1 for every patterns, and the
probability of playing a move is uniform. When k is high,
the highest urgency dominates all the other urgencies and the
program is almost deterministic. The nth update of Q for a
pattern is given by:
Qn = Qn−1 + α(R − Qn−1 )
R is the result of the random game, and α = 1/(1 + n).
Thus, Qn converges to the mean value of the results of the
random games.
More precisely, two tables are used: one for playing, one
for learning. This is an off-line learning. After a block of
games, the values of the learnt table Qlearn update the values
of the table used for playing Qplay by:
Qplay = Qplay + λb Qlearn
λ is a parameter set in ]0, 1[. Its actual value is set by the
experiments. b is the number of the block. In the updating
formula, the addition is used to keep track of good patterns.
During the first block of games, all Qplay values equal
zero, and the games follow a uniform probability. At the
end of the first block of games, a good pattern has a high
Qlearn value because it generates good moves among a set
of games played badly. This value corresponds to the mean
value of results of games given that the policy follows the
uniform probability. Qlearn is copied into Qplay to be used
for playing in the next block of games. A good pattern
quickly increases its Qplay value. At the end of a block of
games, Qlearn corresponds to the mean value of results of
games given that the policy uses the Qplay table. Because λ
is strictly inferior to 1, Qplay converges to a limit when b
increases.
�1) Experiment 1a: one unique learning program: This
first experiment contains results on 9x9 boards only :
•
•
•
RLP R >> Zero
RLP R < M anual
M C(RLP R) << M C(M anual)
RLP R >> Zero shows a learning at the low level.
This is the minimal result expected. However, RLP R <
M anual shows that learning is not completely satisfactory.
M C(RLP R) << M C(M anual) lets us think that RLP R
is too deterministic. As soon as the learner has learnt Q
values for relevant patterns, instead of learning new Q
values for new patterns, the learner prefers to increase the
existing Q values. This results in a player becoming too
deterministic to be used as a basis of the MC player. We call
this phenomenon determinisation. Experiment 2 will show a
different update rule that avoids determinisation in self-play.
However, experiment 1b will use the same update rule as
experiment 1a but it will prevent determinisation by using a
population of learners.
We may comment upon the off-line learning used in this
experiment. λ is strictly inferior to 1 to garantee convergence
of Qplay . However, in practice, we set λ = 1 because we
observed that, for good patterns, Qlearn converges to 0.
Furthermore, we observed that, even though λ = 1, Q play
practically stays in ] − 1, +1[. We do not have theoretical
proof of this phenomenon, but we may provide an intuitive
explanation: when b is sufficiently high, at the end of a block
of games, Qlearn corresponds to the mean value of results
of games given that the policy is good as well. Thus, when
a good pattern is chosen during a game using a good policy,
this is not a surprise, and the mean value of results of games
given that this good pattern is chosen, roughly equals zero.
Finally, with this comment, we observe that what happens in
the first block of random games is crucial to the actual final
value of Qplay . Launching several executions of the process
leads to players that roughly share the same playing level
but may have quite different tables. Using a population of
learners intends to lower the importance of the first block of
games.
2) Experiment 1b: a population of learning programs: To
avoid determinisation of a program, and inspired by the rule:
“when RL does not work, try EC principles”, we performed
an experiment similar to experiment 1a by replacing one
RLP R program by a population of RLP R programs. The
size of the population is N = 64. The underlying idea
is that each individual program learns in its own manner
(increases Q values of specific patterns only). If a program
learns by determinisation, he cannot survive the next generation against other programs having learnt differently. A
generation includes three phases: reinforcement learning, test
and selection. During the reinforcement learning phase, the
RLP R programs play against each other while learning with
the update rule of experiment 1a. Then, for each learner, the
learnt table is added into the playing table. During the test
phase, the RLP R programs play against fixed opponents
(Zero and M anual) without learning. This phase yields a
ranking. The selection phase follows the code below:
Delete the N/2 worst RLPR players
For (D=N/4; D>0; D=D/2)
copy the best D RLPR players
Add Zero player
(The best RLP R program of the generation is copied
five times). This experiment does not use other classical
EC concepts: mutation or cross-over. We obtained results on
19x19:
• Starting population = Zero
– RLP R = Zero + 180
– RLP R = M anual − 50
– M C(RLP R) << M C(M anual)
• Starting population = M anual
– RLP R = Zero + 180
– RLP R = M anual + 50
– M C(RLP R) = M C(M anual) − 20
With a population of programs, learning is possible on
19x19, which was not possible with one unique program.
In the whole set of programs, some of them learn without determinisation, which is right. The convergence depends on the starting program. When starting with Zero,
the population goes toward a local maximum (RLP R =
M anual − 50) inferior to the maximum reached when
starting from M anual (RLP R = M anual + 50). Besides,
M C(RLP R) = M C(M anual) − 20 is a better result than
M C(RLP R) << M C(M anual) obtained in the previous
experiment. In this perspective, this result is good (20 points
can be considered as a reasonable difference on 19x19).
However, the two results M C(RLP R) = M C(M anual) −
20 and RLP R = M anual + 50 underlines that learning still
corresponds to determinisation.
Our conclusion on experiment 1 is that, at the low level,
the RLP R programs have a tendency to determinisation that
hides true learning. Replacing one program by a population
lowers the determinisation problem without removing it
completely. Therefore, in the following experiment, we leave
the low level to perform games at the MC level, even if this
costs computing time.
B. Experiment 2: relative difference at MC level
In this experiment, a M C(RLP R) player plays against
itself again. There is no population. We need a mechanism
that prevents determinisation of experiment 1a. Therefore,
the update rule of experiment 2 is different from the update
rule of experiment 1a. Instead of updating pattern urgencies
one by one, our idea is to consider pairs of patterns, and a
relative differences between variables associated to the pairs
of patterns. Thus, the player uses a relative difference formula
to learn. a and b being two patterns with two MC evaluations,
Va and Vb , and two urgencies, ua and ub , on average we aim
at:
exp(C(Va − Vb )) = ua /ub
This is the basic formula underlying this experiment. It
establishes a correlation between a difference of evaluations
�on average, and a ratio between the two urgencies that we
seek. This way, the over-determinisation of pattern urgencies
should not occur. For pattern i, we define Qi :
Qi = log(ui )
Thus, for two patterns a and b, we look for:
Qa − Qb = C(Va − Vb )
C is assumed to be constant. On a given position with a
and b matching, the observed relative difference is actually:
delta = Qa − Qb − C(Va − Vb )
The updating rules are:
Qa = Qa − αdelta
Qb = Qb + αdelta
When comparing two patterns, a et b, these rules update
the ratio ua /ub according to delta avoiding exagerated
determinisation. We performed learning on 9x9. We have
used a small number of random games to compute Va and
Vb : 20 random games only. C = 0.7, 0.8, 0.9, 1.0 were rather
good values. If Ni is the number of times that √pattern i
matches, we set α proportional to the inverse of N i . We
have tested our 9x9 learner on 9x9 and 19x19 boards.
• on 9x9:
– M C(RLP R) = M C(M anual) + 3
• on 19x19:
– M C(RLP R) = M C(M anual) − 30
An investigation on aspects in which M C(RLP R) plays
different, better or worse than M C(M anual) player can be
performed along the way of playing or along the achieved
result. Concerning the achieved result, and assessing on
19x19 boards a M C(RLP R) player that learnt on 9x9
boards, the achieved result (-30) is similar to the result of
experiment 1b (-20). In other terms, the results obtained
on 19x19 are promising. On 19x19, the results could have
been better if we performed learning on 19x19 as well,
but we did not have enough time to do it. Additionally,
M C(RLP R) = M C(M anual) + 3 shows that the method
works better on 9x9 at the MC level than the manual method
(this result was what we aimed at). The determinisation
problem seems to be solved partially. The way we used
relative difference looks like advantage updating [45]. We
may hardly investigate on the way of playing, and on the
style of M C(RLP R) against M C(M anual), because both
programs share the same design, and their playing style
is almost identical. However, we may give some remarks
concerning the inside of the urgency tables. Because the
patterns used by M anual were created by a human expert,
the patterns always correspond to go concepts such as cut and
connect. Thus, the urgency table of M anual contains nonzero-and-very-high values very sparsely, and the intersection
urgency computing process is optimized to this respect. A
drawback of RLP R players, is that the urgency table is
almost completely filled with non-zero values with a smooth
continuum of values. The intersection urgency computing
process during random games cannot be optimized in this
respect, which slows down RLP R players. Thus, to be
efficiently used, the tables of RLP R players should be
adequately post-processed after learning.
VI. C ONCLUSION
This paper has presented the Monte-Carlo Go architecture
using domain-dependent knowledge, and has described RL
experiments to enhance 3x3 pattern urgencies used during
simulations. In experiment 1a, we identified the determinisation obstacle that negated a good learning. Experiment
1b, a copy of experiment 1a at the low level and replacing
one RL learner by a population of RL learners, avoided
determinisation. Experiment 2 using relative difference and
using Q values instead of raw urgencies, explicitly managed
the determinisation. Consequently, experiment 2 worked well
at the MC level with one learner only, instead of a population
of learners. Quantitatively, the results obtained by experiment
1b and 2 are very promising: after learning on 9x9, the
automatic method is 3 points better than the manual method.
On 19x19, the automatic method is (only) 20 points below
the manual method. But in experiment 2, learning was
performed on 9x9 and tested on 19x19. Thus, the perspective
is to perform learning of experiment 2 on 19x19 and test
on 19x19. Nevertheless, the results of the automatic method
must be reinforced to be certain that the automatic method
is really better than the manual one for 3x3 patterns. With
such certainty, we may replace 3x3 patterns by larger patterns
that a Go expert would have too difficulties to qualify with
adequate urgencies, whereas the automatic method would
easily tackle them.
Discussing ideas linked to EC might be enlightening.
Experiments has been carried out on Go with EC [46]. The
size of the board, although small in these experiments played
a key role: a preliminary learning on a small board speeds up
the following learning performed on a larger board. In our
work, learning urgencies of 3x3 patterns on 9x9 boards yields
a playing level well-tuned for 9x9 boards, but less adapted
to 19x19 boards. To play well on 19x19 boards, learning on
19x19 boards is advisable. However, it is possible to play
or learn on 19x19 boards with a player that learnt on 9x9
boards.
Besides, in experiment 1b, we observed that the result
depended on the initial conditions, and the optimum reached
was only local. This experimental result confirmed the theoretical result known on partially observable MDP [47].
Within the current debate between RL and EC, RL alone
seems to be able to tackle our problem almost entirely
(experiment 2). But, instead of using one unique RL learner,
using a population of learners and a selection mechanism
without mutation or cross-over (experiment 1b) unwound
the situation (experiment 1a). In this view, experiment 1
demonstrates the success of the cooperation of principles
borrowed from both sides, RL and EC. The training method
can be viewed as a memetic algorithm in which randomness
replaces the role of genetic variation. Furthermore, this
conclusion enriches previous results concerning the RL-vsEC debate using Go as a testbed [48].
Lastly, if we have a closer look at the results on 19x19
boards, how to account for the slightly worse results obtained
by the automatic method compared to the manual method ?
�The MC environment may be too exploratory, and the determinisation is actually too tempting and easy a solution for
RL learners whose goal is to learn by winning. Giving up the
MC environment for a while, performing classical Q-learning
experiments [42], [49] on ǫ-greedy programs might constitute
the first steps to the solution: the ǫ-greedy programs being
almost deterministic (see Figure 3), determinisation might be
minimized. Then, randomizing such programs, and testing
them within the MC environment would be the final steps.
VII. A KNOWLEDGEMENTS
This work was started in 2004 by Bruno Bouzy, and was
continued during spring 2005 by Guillaume Chaslot for his
last year placement at Ecole Centrale de Lille, in cooperation
with Rémi Coulom we warmly thank for the discussions and
the clever ideas he suggested.
R EFERENCES
[1] R. Sutton and A. Barto, Reinforcement Learning: an introduction,
T. Dietterich, Ed. MIT Press, 1998.
[2] L. P. Kaelbling, M. Littman, and A. Moore, “Reinforcement
learning:
A survey,” Journal of Artificial Intelligence
Research, vol. 4, pp. 237–285, 1996. [Online]. Available:
citeseer.ist.psu.edu/kaelbling96reinforcement.html
[3] R. Sutton, “Learning to predict by the method of temporal differences,”
Machine Learning, vol. 3, pp. 9–44, 1988.
[4] C. Watkins, “Learning from delayed rewards,” Ph.D. dissertation,
Cambridge University, 1989.
[5] B.
Bouzy,
“Indigo
home
page,”
www.math-info.univparis5.fr/∼bouzy/INDIGO.html, 2005.
[6] J. Schaeffer and J. van den Herik, “Games, Computers, and Artificial
Intelligence,” Artificial Intelligence, vol. 134, pp. 1–7, 2002.
[7] H. van den Herik, J. Uiterwijk, and J. van Rijswijck, “Games solved:
Now and in the future,” Artificial Intelligence, vol. 134, pp. 277–311,
2002.
[8] J. Schaeffer, One Jump Ahead: Clallenging Human Supremacy in
Checkers. Springer-Verlag, 1997.
[9] M. Campbell, A. Hoane, and F.-H. Hsu, “Deep blue,” Artificial
Intelligence, vol. 134, pp. 57–83, 2002.
[10] J. Schaeffer, Y. Björnsson, N. Burch, A. Kishimoto, M. Müller,
R. Lake, P. Lu, and S. Sutphen, “Solving checkers,” in IJCAI, 2005,
pp. 292–297.
[11] M. Buro, “Improving heuristic mini-max search by supervised learning,” Artificial Intelligence Journal, vol. 134, pp. 85–99, 2002.
[12] M. Müller, “Position evaluation in computer go,” ICGA Journal,
vol. 25, no. 4, pp. 219–228, December 2002.
[13] ——, “Computer go,” Artificial Intelligence, vol. 134, pp. 145–179,
2002.
[14] B. Bouzy and T. Cazenave, “Computer go: an AI oriented survey,”
Artificial Intelligence, vol. 132, pp. 39–103, 2001.
[15] D.
Fotland,
“The
many
faces
of
go,”
www.smartgames.com/manyfaces.html.
[16] M. Reiss, “Go++,” www.goplusplus.com/.
[17] D.
Bump,
“Gnugo
home
page,”
www.gnu.org/software/gnugo/devel.html, 2006.
[18] M.
Enzenberger,
“Neurogo,”
www.markusenzenberger.de/neurogo.html.
[19] M. Müller, “Explorer,” web.cs.ualberta.ca/∼mmueller/cgo/explorer.html,
2005.
[20] T. Cazenave, “Golois,” www.ai.univ-paris8.fr/∼cazenave/Golois.html.
[21] K. Chen, “Some practical techniques for global search in go,” ICGA
Journal, vol. 23, no. 2, pp. 67–74, 2000.
[22] M. Enzenberger, “Evaluation in go by a neural network using soft
segmentation,” in 10th Advances in Computer Games, E. A. H. H. Jaap
van den Herik, Hiroyuki Iida, Ed. Graz: Kluwer Academic Publishers,
2003, pp. 97–108.
[23] M. Müller, “Decomposition search: A combinatorial games approach
to game tree search, with applications to solving go endgame,” in
IJCAI, 1999, pp. 578–583.
[24] T. Cazenave, “Abstract proof search,” in Computers and Games, ser.
Lecture Notes in Computer Science, I. F. T. Marsland, Ed., no. 2063.
Springer, 2000, pp. 39–54.
[25] E. van der Werf, J. Uiterwijk, and J. van den Herik, “Learning to score
final positions in the game of go,” in Advances in Computer Games,
Many Games, Many Challenges, H. J. van den Herik, H. Iida, and
E. A. Heinz, Eds., vol. 10. Kluwer Academic Publishers, 2003, pp.
143–158.
[26] Fishman, Monte-Carlo : Concepts, Algorithms, Applications.
Springer, 1996.
[27] G. Tesauro and G. Galperin, “On-line policy improvement using Monte
Carlo search,” in Advances in Neural Information Processing Systems.
Cambridge MA: MIT Press, 1996, pp. 1068–1074.
[28] D. Billings, A. Davidson, J. Schaeffer, and D. Szafron, “The challenge
of poker,” Artificial Intelligence, vol. 134, pp. 201–240, 2002.
[29] B. Sheppard, “World-championship-caliber scrabble,” Artificial Intelligence, vol. 134, pp. 241–275, 2002.
[30] B. Abramson, “Expected-outcome : a general model of static evaluation,” IEEE Transactions on PAMI, vol. 12, pp. 182–193, 1990.
[31] B.
Brügmann,
“Monte
Carlo
go,”
1993,
www.joy.ne.jp/welcome/igs/Go/computer/mcgo.tex.Z.
[32] S. Kirkpatrick, C. Gelatt, and M. Vecchi, “Optimization by simulated
annealing,” Science, May 1983.
[33] B. Bouzy and B. Helmstetter, “Monte Carlo go developments,” in
10th Advances in Computer Games, E. A. H. H. Jaap van den Herik,
Hiroyuki Iida, Ed. Graz: Kluwer Academic Publishers, 2003, pp.
159–174.
[34] L. P. Kaelbling, “Learning in embedded systems,” Ph.D. dissertation,
MIT, 1993.
[35] B. Bouzy, “The move decision process of Indigo,” International
Computer Game Association Journal, vol. 26, no. 1, pp. 14–27, March
2003.
[36] ——, “Associating shallow and selective global tree search with
Monte Carlo for 9x9 go,” in Computers and Games: 4th International
Conference, CG 2004, ser. Lecture Notes in Computer Science, N. N.
J. van den Herik, Y. Björnsson, Ed., vol. 3846 / 2006. Ramat-Gan,
Israel: Springer Verlag, July 2004, pp. 67–80.
[37] P. Kaminski, “Vegos home page,” www.ideanest.com/vegos/, 2003.
[38] J. Hamlen, “Seven year itch,” ICGA Journal, vol. 27, no. 4, pp. 255–
258, 2004.
[39] R. Coulom, “Efficient selectivity and back-up operators in montecarlo tree search,” in Computers and Games, Torino, Italy, 2006, paper
currently submitted.
[40] T. Raiko, “The go-playing program called go81,” in Finnish Artificial
Intelligence Conference, Helsinki, Finland, September 2004, pp. 197–
206.
[41] B. Bouzy, “Associating knowledge and Monte Carlo approaches within
a go program,” Information Sciences, vol. 175, no. 4, pp. 247–257,
November 2005.
[42] C. Watkins and P. Dayan, “Q-learning,” Machine Learning, vol. 8, pp.
279–292, 1992.
[43] D. P. Bertsekas, Dynamic Programming and Optimal Control. Athena
Scientific, 1995.
[44] D. Goldberg, Genetic Algorithms in Search, Optimization, and Machine Learning. Addison-Wesley Publishing Co, 1989.
[45] L. Baird, “Advantage updating,” 1993. [Online]. Available:
citeseer.ist.psu.edu/baird93advantage.html
[46] K. Stanley and R. Miikkulainen, “Evolving a roving eye for go,” in
Genetic and Evolutionary Computation Conference, New-York, 2004.
[47] T. Jaakkola, S. P. Singh, and M. I. Jordan, “Reinforcement
learning algorithm for partially observable Markov decision
problems,” in Advances in Neural Information Processing
Systems, G. Tesauro, D. Touretzky, and T. Leen, Eds., vol. 7.
The MIT Press, 1995, pp. 345–352. [Online]. Available:
citeseer.ist.psu.edu/jaakkola95reinforcement.html
[48] T. P. Runarsson and S. Lucas, “Co-evolution versus self-play temporal
difference learning for acquiring position evaluation in small-board
go,” IEEE Transactions on Evolutionary Computation, vol. 9, no. 6,
pp. 628–640, December 2005.
[49] M. L. Littman, “Markov games as a framework for multi-agent
reinforcement learning,” in Proceedings of the 11th International
Conference on Machine Learning (ML-94). New Brunswick,
NJ: Morgan Kaufmann, 1994, pp. 157–163. [Online]. Available:
citeseer.ist.psu.edu/littman94markov.html
�
 Bruno Bouzy
Bruno Bouzy