TuA02-3
Proceedings of the 2005 IEEE
International Symposium on Intelligent Control
Limassol, Cyprus, June 27-29, 2005
Actuator Fault Diagnosis and Accommodation
for Improved Flight Safety
Xiaodong Zhang, Marios M. Polycarpou, Roger Xu, and Chiman Kwan
Abstract— This paper presents an adaptive fault diagnosis
and accommodation scheme for aerodynamic actuators. The
fault-tolerant control architecture consists of three main
components: an online nonlinear fault detection and isolation
scheme, a controller suite, and a reconfiguration supervisor
which performs controller reconfiguration and control
reallocation using online diagnostic information. The proposed
scheme provides a unified architecture for fault detection,
isolation and accommodation of actuator failures. Simulation
studies using a nonlinear ‘Beaver’ aircraft model have shown
the effectiveness of the proposed scheme.
I. INTRODUCTION
Aerodynamic actuator failures have become a significant
concern for flight safety. Recent accidents have been caused
by a single actuator failure or a complete loss of the whole
hydraulic actuation system [1]. A fault-tolerant control
system is capable of automatically compensating for the
effects of faults and of maintaining the performance of the
control system, at some acceptable level, even in the
presence of faults. A traditional approach to fault-tolerance
is to use robust control designs for anticipated faults, which
is, in general, a conservative approach and may sacrifice
achivable performance under normal operating conditions
[2]. In contrast, an active fault-tolerant control system that
automatically detects and identifies component failures and
adapts to such failures as they occur has the potential to
achieve superior performance throughtout the full flight
operations. Moreover, a truly fault-tolerant control system
must also be able to accommodate new and unanticipated
faults.
In addition, the dynamics of vehicles are usually highly
nonlinear and poorly modeled or rapidly changing over
different flight conditions. Traditional model-based fault
diagnosis and flight control designs employing linearization
and gain scheduling techniques tends to be rather tedious.
Moreover, when the effect of various faults has to be taken
into account, the size and complexity of the scheduling
table is significantly increased, which makes it very difficult
for design and real-time implementation. Therefore, future
fault-tolerant flight control system will benefit from more
advanced methods, which are directly based on intrinsic
nonlinear dynamics of the vehicle.
The design and analysis of fault diagnosis algorithms
based on the model-based analytical redundancy approach
have received significant attention during the last two
decades [3], [4], [5]. Recently there has also been a lot of
research activity on fault diagnosis and accommodation of
nonlinear systems [5], [6], [7], [8], [9], [10]. The fault
information generated by the detection and isolation
procedures can be very useful to fault-tolerant control
design.
In this paper, we present a unified nonlinear framework
for detection, isolation, and accommodation of aerodynamic
actuator faults. It is an application of the fault diagnosis and
accommodation architecture presented in previous papers
[9], [10]. The proposed architecture consists of three
components: a fault diagnosis scheme, a controller suite,
and a reconfiguration supervisor. The first part of this
research work, i.e.., detailed design and analysis of the
controller suite, has been described in our previous paper
[11] and will only be briefly summarized here. A nonlinear
DHC-2 ‘Beaver’ aircraft [12] is used to illustrate the
effectiveness of overall fault-tolerant control design.
II. FAULT DIAGNOSIS AND ACCOMMODATION
ARCHITECTURE
Reconfiguration
supervisor
reference inputs
control inputs
Controller suite
Manuscript received December 5, 2004. This work was supported in
part by NASA Ames Research Center under Grant NAS2-03104.
X. Zhang, R. Xu, and C. Kwan are with Intelligent Automation, Inc,
15400 Calhoun Dr., Suite 400, Rockville, MD 20855, USA. (phone: 301294-5269; fax: 301-294-5201; e-mail: xzhang@i-a-i.com).
Marios M. Polycarpou is with Department of Electrical and Computer
Engineering, University of Cyprus, Nicosia 1678, Cyprus, and also with
the Department of Electrical & Computer Engineering and Computer
Science, University of Cincinnati, Cincinnati, OH 45221-0030, USA.
0-7803-8936-0/05/$20.00 ©2005 IEEE
Fault information
fault diagnosis
scheme
Nonlinear aircraft
measurements
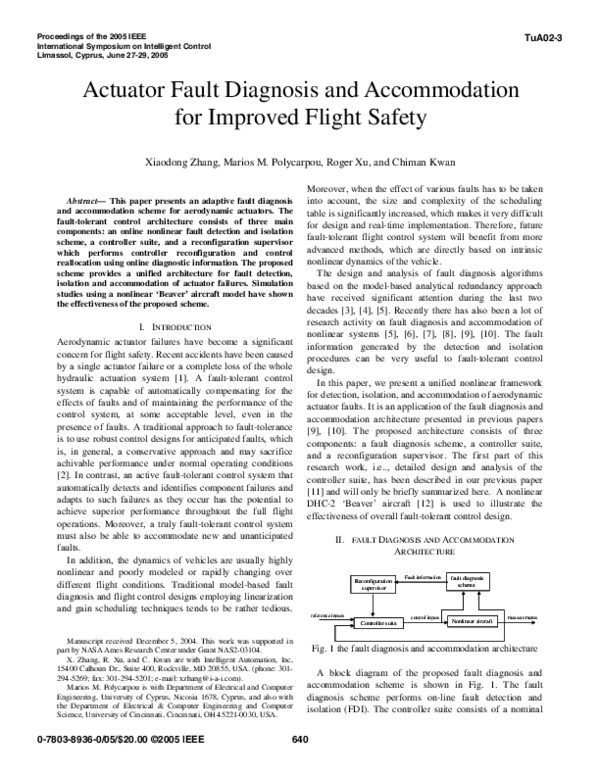
Fig. 1 the fault diagnosis and accommodation architecture
A block diagram of the proposed fault diagnosis and
accommodation scheme is shown in Fig. 1. The fault
diagnosis scheme performs on-line fault detection and
isolation (FDI). The controller suite consists of a nominal
640
�controller used under normal conditions (without faults) and
a neural network based adaptive controller. The adaptive
fault-tolerant controller is activated after fault detection to
compensate for the effects of faults. The reconfiguration
supervisor makes two types of decisions using on-line
diagnostic information, including reconfiguration decision
between the nominal controller and adaptive fault-tolerant
controller defined in the controller suite and control
reallocation decision in the presence of failures of primary
actuators.
The proposed fault-tolerant control scheme provides a
unified framework for fault detection, isolation, and
accommodation. The basic idea is as follows. Under normal
operation conditions, the nominal controller guarantees
stability and tracking performance. Meanwhile, the fault
diagnosis module monitors the system to detect the
occurrence of any faults. Once a fault is detected, the
adaptive fault-tolerant controller is activated. Although at
this stage the particular type of fault that has occurred has
not yet been determined, the fault-tolerant controller
employing a neural network approximator is able to learn
the unknown fault function and automatically compensate
for its effect. At the same time, the fault diagnosis module
proceeds to determine the particular type of fault that has
occurred. Finally, if the fault is isolable, then the fault
information can be used to further improve flight safety by
control reallocation in the case of a failure of primary
aerodynamic actuators.
III. AIRCRAFT MODEL
In this work, we use the DHC-2 ‘Beaver’ aircraft model
[12] to evaluate the feasibility of the fault-tolerant control
scheme. The state vector describing the motion dynamics of
the ‘Beaver’ aircraft model consists of twelve elements:
three linear velocities, three angular velocities, three Euler
angles, the true speed, angle of attack, and sideslip angle.
Here we only consider the fault-tolerant control design for
the ( p, q, r ) dynamics of the ‘Beaver’ aircraft model,
because the dynamics of this ( p, q, r ) inner loop are much
faster than other outer loops. However, all the aerodynamic
variables and their effects on flight dynamics were
simulated in our simulation studies. Other variables were
initialized at a certain flight condition and then kept open
loop.
The ( p, q, r ) dynamics of the DHC-2 ‘Beaver’ aircraft
are described by the following differential equations:
p� = f p ( p, q, r ) + Pn N + Pl L
q� = f q ( p, q, r ) + Qm M
(1)
r� = f ( p, q, r ) r + Rn N + Rl L
where f p , f q , f r are polynomial functions of ( p, q, r ) ,
Pn , Pl , Qm , Rn , and Rl are constants, and the aerodynamic
moment functions L , M , and N are given by [12]:
§
·
L = qdyn Sb ¨¨ Cla + Clδα 1 + Clδα 2 α δα + Clδ r δ r ¸¸
§
¨¨
©
©
(
)
M =qdyn Sc Cma + Cmδ δ e + Cmδ δ
§
¨
©
e
f
¹
·
f ¸¸
¹
N =qdyn Sb Cna + Cnδα δα + Cnδ r δ r ·¸
¹
where,
pb
rb
+C
+C
C =C +C β +C
la
l
l
l 2V
l 2V
lp
0
β
p
r
qc
rb
=C
+C α +C
+C
+C
α2 + C
β2 +C
C
ma
m
m
m
m V
m
m 2V
mp
0
2
2
α
q
r
α
β
pb
rb
qc
+C
+C
+C
β 3 +C
C =C +C β + C
na n
n
n 2V n 2V n V
n
np
0
3
p
r
q
β
β
By combing the above equations and using some simple
algebraic manipulations, we have
p� = f p = f p + Pn qdyn SbCna + Pl qdyn SbCla + qdyn Sb( Pn Cnδα +
Pl (Clδα 1 + Clδα 2 α ))δ α + qdyn Sb( Pn Cnδ r + PC
l lδ r )δ r
q� = f q = f q + Qm qdyn ScCma + Qm qdyn Sc (Cmδ δ e + Cmδ δ f )
e
f
(2)
r� = f r = f r + qdyn Sb( Rn Cna + Rl Cla ) + qdyn Sb( Rn Cnδα +
Rl (Clδα 1 + Clδα 2 α ))δ α + qdyn Sb( Rn Cnδ r + Rl Clδ r )δ r
For more details of the aircraft model (e.g., definitions of
some notations in (2)), we refer to [12]. We assume that the
primary aerodynamic actuators are δ a , δ e , and δ r , and δ f
is an redundant actuator. So the objectives of our faulttolerant control design are as follows:
• Detect the occurrence of any faults;
• Isolate and accommodate the failures of these three
primary actuators. Moreover, if a fault occurs to δ e ,
we will reallocate the control to the redundant actuator
δ f for improved flight safety. It is worth noting that
similar control reallocation schemes can also be
designed for actuators δ a and δ r , if secondary
•
actuation systems in these control channels are
available.
In the case of a new and unanticipated fault, the fault
cannot be isolated. Then the neural network based
adaptive fault-tolerant controller activated after fault
detection is capable of learning the unknown fault
function on-line and providing some minimal
performance (e.g., closed-loop stability).
IV. FAULT DETECTION AND ISOLATION SCHEME
The design of the nonlinear FDI scheme is based on our
previous work [9]. The monitoring module consists of a
bank of N + 1 nonlinear adaptive estimators operating in
parallel, where N is the number of possible fault types in
the partially known fault class. One of the adaptive
estimators is the fault detection and approximation
estimator (FDAE) used to detect and approximate faults.
641
�The remaining adaptive estimators are fault isolation
estimators (FIEs) activated for the purpose of fault isolation
only after a fault has been detected. Each FIE corresponds
to a particular type of fault in the fault class. Under normal
conditions (without faults), the FDAE is the only estimator
monitoring the system. Once a fault is detected, the bank of
FIE is activated to further determine the particular type of
fault that has occurred.
The fault detection decision scheme: The decision on the
occurrence of a fault (detection) is made when the modulus
of at least one of the estimation error components ε i0 (t )
faults under consideration belong to the fault class F given
by
ªθ11 g11 ( x, u ) º
°«
»
0
F � {φ 1 , φ 2 , φ 3 } = ® «
»,
° «θ 1 g 1 ( x , u ) »
¼
¯¬ 3 3
δ a , δ e , and δ r , respectively, the functions
g11 ( x, u ) � qdyn Sb( Pn Cnδα + Pl (Clδα 1 + Clδα 2 α ))δα ,
g31 ( x, u ) � qdyn Sb( Rn Cnδα + Rl (Clδα 1 + Clδα 2 α ))δ α
g 22 ( x, u ) � Qm qdyn ScCmδ δ e ,
n
time is defined as Td � inf * {t ≥ T0 : ε i0 (t ) > ε i0 (t )} , where
e
g13 ( x, u ) � qdyn Sb( Pn Cnδ r + PC
l lδ r )δ r ,
i =1
and is detected at time Td , where s ∈ {1," , N } , then a set
of adaptive thresholds
{µis (t ), i
= 1,..., n} exist such that the
i th component of the residual vector generated by the s th
estimator
satisfies
ε is (t ) ≤ µ is (t ) ,
for
all
t ≥ Td .
Consequently, for each s = 1," , N , a set of adaptive
threshold functions µis (t ) can be associated with the s th
fault isolation estimator. In the fault isolation process, for a
particular s , if ε is (t ) > µis (t ) for some t > Td and some
i = 1," , n , then the possibility of fault s having occurred
can be excluded. Based on this intuitive idea, the following
isolation decision scheme can be designed.
Fault isolation decision scheme: If, for each
r ∈ {1, 2,..., N } \{s} , there exists some finite time t r > Td
and some i ∈ {1,..., n} , such that ε ir (t r ) > µir (t r ) , then the
occurrence of fault
s is concluded. The fault isolation time
∆
s
is defined as Tisol
= max{t r , r ∈ {1,..., N } \ {s}} .
Following the formulation given in [9], we can put (2)
into the following general form:
ª fpº
ª p� º
« q� » = « f » + β (t − T )φ + η ,
(3)
0
« q»
« »
«
»
«¬ r� »¼
¬ fr ¼
where φ represents the unknown changes in the system
dynamics due to faults, η is the modeling uncertainty, and
β is the fault time profile. In this paper, we only consider
the case of abrupt faults, i.e., β is a step function given by
0, if t < T0
¯1, if t ≥ T0
β (t − T0 ) = ®
Based on the aircraft model described by (2), the actuator
ªθ13 g13 ( x, u )º ½
«
»° ,
0
«
»¾
«θ 33 g 33 ( x, u )» °
¬
¼¿
(4)
where φ 1 , φ 2 , and φ 3 represent the failures of actuators
exceeds its corresponding bound ε i0 (t ) . The fault detection
T0 is the unknown fault occurrence time.
The fault isolation decision scheme is based on the
following principle: if the fault s occurs at some time T0
0
ª
º
«θ 2 g 2 ( x, u ) » ,
2
2
«
»
0
¬«
¼»
g33 ( x, u ) � qdyn Sb( Rn Cnδ r + Rl Clδ r )δ r ,
represent the functional structures of the faults, and the
unknown
parameters
θ11 ∈ [0 − 1] ,
θ 31 ∈ [0 − 1] ,
θ 22 ∈ [0 − 1] , θ13 ∈ [0 − 1] , and θ 33 ∈ [0 − 1] represent the
unknown magnitude of the fault. For instance, the case of
θ11 = θ 31 = θ 22 = θ13 = θ 33 = 0 implies that all the actuators are
“healthy” and under normal operating conditions, whereas
the case of θ11 = θ 31 = θ 22 = θ13 = θ 33 = −1 represents the very
extreme case that all the actuators have completely failed, in
the sense that there is no control output. Otherwise, it
represents a partial failure of the corresponding actuator.
By using the FDI methodology described in [9], a bank
of four adaptive estimators is designed. One of them is the
fault detection estimator, and the remaining are fault
isolation estimators. The derivation of adaptive thresholds
for fault detection and isolation, fault detectability and
isolability, and fault detection and isolation time have been
rigorously established in [9], [10]. For instance, the fault
isolability condition and the fault isolation time are
characterized by a so-called fault mismatch function which
gives a certain measure of the difference between faults.
Remark: In literature, there exist several types of
observer schemes. For example, within the fault isolation
framework, the dedicated observer scheme (DOS) and the
generalized observer scheme (GOS) are typically used [5].
The fault isolation decision logic used here falls within the
GOS framework.
V. CONTROLLER MODULE
The controller module consists of a nominal controller
and an adaptive fault-tolerant controller employing a neural
network approximator, which is activated after fault
detection to compensate for the effect of faults. The details
of controller module design for the DHC-2 ‘Beaver’ aircraft
model have been presented in our previous paper [11]. The
nominal controller is implemented as a PI controller by
642
�using feedback linearization. The adaptive fault-tolerant
controller consists of two parts. The first part is designed to
deal with partially known faults that cause unknown
parametric changes in the aerodynamic moment functions
L , M , and N , and the second part is augmented to deal
with new or unanticipated faults by using neural network
based on-line learning methods. Theoretical analysis
regarding the stability of the neural network based adaptive
fault-tolerant controller can be found in [11].
VI. RECONFIGURATION SUPEVISOR
Compared with traditional robust control approaches
which achieve fault-tolerance passively using the worst case
scenario, the fault-tolerant control scheme proposed in this
research work is an active approach, in the sense that the
controller structure is reconfigured online using fault
diagnostic information.
Next we describe the
reconfiguration strategies. First of all, we define three
important time instants: T0 ≥ 0 is the time when a fault
where Pqr , Q pr , and R pq are known constants defined in
the polynomial functions f p , f q , f r , θ p ∈ [−0.25, 0.25] ,
θ q ∈ [−0.25, 0.25] , and θ r ∈ [−0.25, 0.25] are unknown
constants representing up to 25% variation in the nominal
values of Pqr , Q pr , and R pq , respectively. The sinusoidal
terms represent some high frequency noise. A bounding
function on the modeling uncertainty can be easily obtained
ª 0.25 Pqr qr + 0.02 º
«
»
as η = « 0.25 Q pr pr + 0.02 » , which is used in the design of
«
»
« 0.25 R pq + 0.02 »
pq
«¬
»¼
adaptive thresholds for fault detection and isolation [9].
occurs; Td > T0 is the time when the monitoring system
(possibly) provides a fault detection decision; Tisol > Td is
the time when the monitoring system (possibly) provides a
fault isolation decision, that is, which actuator has actually
partially or completely failed. Then we propose the
following reconfiguration strategies:
(1) After fault detection (i.e., for Td ≤ t < Tisol ), the
nominal controller is reconfigured to compensate for
the effect of the (yet unknown) fault; that is, the
nonlinear adaptive fault-tolerant controller is activated
to exploit the information that a fault occurred to
maintain some acceptable control performance;
(2) After the actuator fault is isolated (i.e., for t ≥ Tisol ),
alternative actuation modes can be used to provide
additional control authority. Note that here the
structure of the adaptive fault-tolerant controller
remains unchanged, but the control signal is realloated
to “healthy” secondary actuation systems.
(a) Normal operating condition
(b) A partial failure of actuator δ e with
VII. SIMULATION RESULTS
In this section, we will illustrate the effectiveness of the
proposed fault-tolerant control scheme by considering the
following two case studies: (1) actuator fault diagnosis and
accommodation, (2) the case of a new or unanticipated
fault.
A. Actuator FDI and control reallocation
We assume the modeling uncertainty in the ( p, q, r )
dynamics described by (3) is given by
ªθ p Pqr qr + 0.02sin(10t ) º
«
»
η = «θ q Q pr pr + 0.02 sin(15t ) » ,
«
»
«¬θ r R pq pq + 0.02sin(10t ) »¼
θ 22 = −0.4 occurs at
t = 12 second
Fig. 2: Tracking performance of the nominal controller
Fig. 2 shows the results when a partial failure of
actuator δ e (a fault of type 2 in the fault class defined by
(4)) with θ22 = −0.4 occurs at t = 12 second. As shown in
bottom and right plot of Fig. 2(a), the nominal controller
provides good tracking of the pitch rate reference signal
under normal conditions (without fault). However, after a
fault occurs at time t = 12 second, the tracking performance
significantly deteriorates, as can be seen from bottom and
right plot of Fig. 2(b).
643
�estimates the ( p, q, r ) state variables and generates three
residuals. As shown in Fig. 4, while all of the residuals
generated by fault isolation estimator 2 always remain
below their thresholds, at least one component of the
residuals generated by each of the remaining two estimators
exceeds the corresponding threshold almost immediately
after the isolation estimators are activated. Therefore, this
allows the isolation of a fault of type 2, i.e., a failure of
actuator δ e .
Fig. 3 fault detection residual and threshold generated by the fault
detection estimator;
Fig. 5 illustrates the concept of controller reconfiguration
and control reallocation using on-line diagnostic
information. First, the adaptive fault-tolerant controller is
activated to compensate for the fault right after fault
detection at approximately t = 10 second. Second, since the
fault isolation results (Fig. 4) indicate that it is a failure of
the elevator actuator δ e , we might no longer want to use δ e
to control the pitch rate for flight safety. Then the redundant
actuator δ f is activated to provide the required control
authority. It is worth noting that a simple scheme has been
used so that the switching between δ e and δ f is carried out
continuously to improve the transient performance. The
outputs of δ e and δ f are shown in the two upper figures of
(a) fault isolation estimator 1
Fig. 5, respectively. The tracking performance of the
adaptive fault-tolerant controller with control reallocation is
shown in the bottom and right plot of Fig. 5. Acceptable
control performance is achieved even in the presence of the
fault.
Analogous simulation studies corresponding to the
occurrence of actuator faults φ 1 and φ 3 (i.e., a failure of
δ a or δ r ) have also been performed. Satisfactory faulttolerance performance has been achieved. Due to space
limitation, these results are not described here.
It is worth noting that only secondary actuation system is
considered here. In our future work, we intend to include all
the possible actuation systems, including jet engines [13].
(b) fault isolation estimator 2
(c ) fault isolation estimator 3
Fig. 4: Residuals and their corresponding adaptive thresholds generated by
fault isolation estimators
The results of the fault detection scheme and fault
isolation scheme are shown in Fig. 3 and Fig. 4,
respectively. As we can see from Fig. 3, the fault is almost
immediately detected after its occurrence (within 0.5
second). It is worth noting that each fault isolation estimator
644
Fig. 5: Tracking performance of the adaptive neural controller with
controller reconfiguration and control reallocation
�B. The case of an unanticipated fault
As described early, another advantage of the presented
fault-tolerant control scheme is its capability to handle the
occurrence of new or unanticipated faults. In this case, the
fault will be possibly detected but not isolable, since it does
not belong to the fault class under consideration. However,
the neural network incorporated in the adaptive faulttolerant controller provides the adaptive structure to learn
the unknown fault on-line. In other words, the fault-tolerant
controller activated after fault detection is capable of
maintaining system stability and acceptable tracking
performance before further human intervention.
new fault.
VIII. CONCLUSION
A unified architecture for detecting, isolating and
accommodating of aerodynamic actuator faults is presented
in this paper. Following failures of primary actuators,
redundant actuators are used to provide additional control
authority. In our future work, we will extend the presented
fault-tolerant
control
architecture
to
alternative
aerodynamic and propulsion actuations [13], therefore
establishing a sequential utilization of all actuation systems
available for critical stability and control augmentation
tasks.
REFERENCES
[1]
[2]
[3]
[4]
Fig. 6: Tracking performance of the nominal controller when the fault
occurs at t = 12 second
[5]
[6]
[7]
[8]
[9]
Fig. 7: Tracking performance of the neural network based adaptive
fault-tolerant controller activated after fault detection
[10]
Fig. 6 and Fig. 7 illustrate this concept. As an example,
we
consider
a
fault
given
by
φ = ª« 0 C mα 3 Qm qdyn Sc α 3 0 º» ,
¬
¼
T
where
C mα 3 = 10 .
[11]
[12]
[13]
Obviously, the functional structure of this fault doesn’t
belong to the fault class defined in (4). The bottom and
right plot of Fig. 6 shows the tracking performance of the
nominal controller significantly deteriorates after the fault
occurs. The fault is detected within 0.5 second after its
occurrence (the FDI plots are not shown here due to space
limitation). Fig. 7 illustrates that the neural network based
adaptive fault-tolerant controller is capable of maintaining
acceptable tracking performance even in the presence of the
645
National Transportation Safety Board. United Airlines Fligth 232.
Aircraft Accident Report PB90-910406, NTSB/AAR-90/06,
McDonnell-Douglas DC-10, Sioux Gateway Airpot, NTSB, Sioux
City, Iowa, July 1989.
R. J. Patton, “Fault-tolerant control: the 1997 situation (survey),”
Proceedings of the IFAC SAFEPROCESS, pp. 1029-1052, UK,
1997.
P. M. Frank, “Fault diagnosis in dynamic systems using analytical
and knowledge-based redundancy - a survey and some new results,”
Automatica, vol. 26, pp. 459-474, 1990.
J. J. Gertler, “Survey of model-based failure detection and isolation
in complex plants,” IEEE Control Systems Magazine, vol. 8, pp. 311, 1998.
J. Chen and R. J. Patton, Robust Model-Based Fault Diagnosis for
Dynamic Systems, Kluwer Academic Publishers, 1999.
E. A. Garcia and P. M. Frank, “Deterministic nonlinear observerbased approaches to fault diagnosis: a survey,” IFAC Control
Engineering Practice, vol. 5, pp. 663-670, 1997.
H. Hammouri, M. Kinnaert, and E. H. El Yaagoubi, “Oberver--based
approach to fault detection and isolation for nonlinear systems,”
IEEE Trans. on Automatic Control, vol. 44, pp. 1879-1884, 1999.
C. De Persis and A. Isidori, “A geometric approach to nonlinear fault
detection and isolation,” IEEE Trans. on Automatic Control, vol. 46,
pp. 853-865, 2001.
X. Zhang, M. M. Polycarpou, and T. Parisini, “A robust detection
and isolation scheme for abrupt and incipient faults in nonlinear
systems, ” IEEE Trans. on Automatic Control, vol. 47, pp. 576-593,
2002.
X. Zhang, T. Parisini, and M. M. Polycarpou, “Adaptive faulttolerant control of nonlinear systems: a diagnostic information-based
approach,” IEEE Transactions on Automatic Control, vol. 49, no. 8,
pp. 1259-1274, August 2004.
M. M. Polycarpou, X. Zhang, R. Xu, Y. Yang and C. Kwan, “A
neural network based approach to adaptive fault-tolerant flight
control,” Proceedings of ISIC’2004, Taipei, pp. 61-66.
M. Rauw, FDC 1.2 – A Simulink Toolbox for Flight Dynamics and
Control Analysis, 2nd edition, 2001.
F. W. Burcham, J. Burken, T. A. Maine, J. Bull, Emergency Flight
Control Using Only Engine Thrust and Lateral Center-Of-Gravity
Offset: A First Look, NASA Technical Report TM-4798, 1997.
�
 CHIMAN KWAN
CHIMAN KWAN