Original Article
J Gynecol Oncol Vol. 26, No. 1:62-67
http://dx.doi.org/10.3802/jgo.2015.26.1.62
pISSN 2005-0380·eISSN 2005-0399
Single-site robotic surgery in gynecologic cancer:
a pilot study
Ha-Na Yoo, Tae-Joong Kim, Yoo-Young Lee, Chel Hun Choi, Jeong-Won Lee, Duk-Soo Bae, Byoung-Gie Kim
Department of Obstetrics and Gynecology, Samsung Medical Center, Sungkyunkwan University School of Medicine, Seoul, Korea
Objective: To discuss the feasibility of single-site robotic surgery for benign gynecologic tumors and early stage gynecologic
cancers.
Methods: In this single institution, prospective analysis, we analyzed six patients who had undergone single-site robotic surgery
between December 2013 and August 2014. Surgery was performed using the da Vinci Si Surgical System. Patient characteristics
and surgical outcomes were analyzed.
Results: Single-site robotic surgery was performed successfully in all six cases. The median patient age was 48 years, and the
median body mass index was 25.5 kg/m2 (range, 22 to 33 kg/m2). The median total operative time was 211 minutes, and the
median duration of intracorporeal vaginal cuff suturing was 32 minutes (range, 22 to 47 minutes). The median duration of pelvic
lymph node dissection was 31 minutes on one side and 27 minutes on the other side. Patients’ postoperative courses were
uneventful. The median postoperative hospital stay was 4 days. No postoperative complications occurred.
Conclusion: When used to treat benign gynecologic tumors and early stage gynecologic cancers, the single-site da Vinci robotic
surgery is feasible, safe, and produces favorable surgical outcomes.
Keywords: Gynecology; Minimally Invasive Surgical Procedures; Operation Time; Postoperative Complications; Robotic Surgical
Procedure; Single-site
INTRODUCTION
Minimally invasive surgery including single-port surgery has
been a new option in gynecologic surgery. Among the potential benefits are aesthetic improvements, less pain, and greater
patient satisfaction [1,2]. In addition, obtaining specimen is
easier with a larger umbilical opening. Nevertheless, poor
ergonomics, loss of triangulation, instrument collision, and
insufficient traction are hurdles to the use of this technique.
Robotic systems are among the latest advances in the field
of minimally invasive surgery. A robotic system provides the
surgeon with an expanded view of the operative field with
good ergonomics. Robotic systems can overcome the techni-
cal difficulties of single-port surgery and offer the advantages
of greater dexterity, tremor filtration, and three-dimensional
vision [3]. Moreover, robotic-assisted hysterectomies for
women with benign disease resulted in reduced hospital
readmission rates, less estimated blood loss (EBL), and shorter
overall hospital stays [4]. Single-site robotic surgery combines
the advantages of single-port surgery and robotic surgery
[5,6]. However, to date, there have been few published studies
of single-site gynecologic robotic surgery. Herein, we report
our successful initial experience with single-site da Vinci (SSdV, Intuitive Surgical, Sunnyvale, CA, USA) surgery for benign
gynecologic tumors and early stage gynecologic cancers.
Received Nov 13, 2014, Revised Dec 2, 2014, Accepted Dec 9, 2014
MATERIALS AND METHODS
Correspondence to Tae-Joong Kim
Department of Obstetrics and Gynecology, Samsung Medical Center,
Sungkyunkwan University School of Medicine, 81 Irwon-ro, Gangnam-gu,
Seoul 135-710, Korea. E-mail: tj28.kim@gmail.com
1. Patients
From December 2013 through August 2014, SS-dV surgery
was performed on six patients with benign gynecologic
Copyright © 2015. Asian Society of Gynecologic Oncology, Korean Society of Gynecologic Oncology
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and
reproduction in any medium, provided the original work is properly cited.
www.ejgo.org
�Single-site robotic surgery in gynecologic cancer: a pilot study
tumors or early-stage gynecologic cancers. Case no. 1 had a
7.6 cm right ovarian mass that appeared to be a borderlineto-malignant tumor and underwent an SS-dV hysterectomy
with bilateral salpingo-oophorectomy. Case no. 2 was referred
to our hospital with a conization result of invasive squamous
cell carcinoma that had a positive endocervical resection
margin. She also had a history of two previous cesarean
sections. The patient had an SS-dV hysterectomy. Case no. 3
had imaging suspicious of endometrial cancer stage Ia before
the surgery. Therefore, an SS-dV hysterectomy, right salpingooophorectomy, and left salpingectomy were performed. While
waiting for the frozen biopsy result, the surgeon started with
a left pelvic lymph node dissection (PLND). The result showed
no cancer invasion beyond the endometrium, and therefore
no further operation was required. In Case no. 4, an endometrial biopsy showed grade 1 endometrioid adenocarcinoma.
Since the RUMI (uterine manipulator; CareFusion, Basingstoke,
Hampshire, UK) could not be used due to vaginal tightness,
her colpotomy was performed from the vaginal approach.
With the exception of this case, the RUMI manipulator was
used in all other SS-dV hysterectomies. Because pelvic lymph
node metastasis was present, the final diagnosis of Case no. 4
was endometrial cancer IIIc, and she received adjuvant pelvic
radiotherapy with six cycles of weekly-cisplatin. Case no. 5
was referred to our hospital with a grade 1 adenocarcinoma
diagnosed via endometrial biopsy. She also had adenomyosis,
which delayed the timing of her colpotomy. Case no. 6 was
suspected of having a borderline-to-malignant ovarian cancer
arising from endometriosis based on imaging. A single-port
laparoscopic left salpingo-oophorectomy was initially performed to obtain a frozen biopsy. Then, an omentectomy and
a para-aortic lymph node dissection (PaLND) were performed.
Finally, the surgeon dissected bilateral pelvic lymph nodes
using SS-dV.
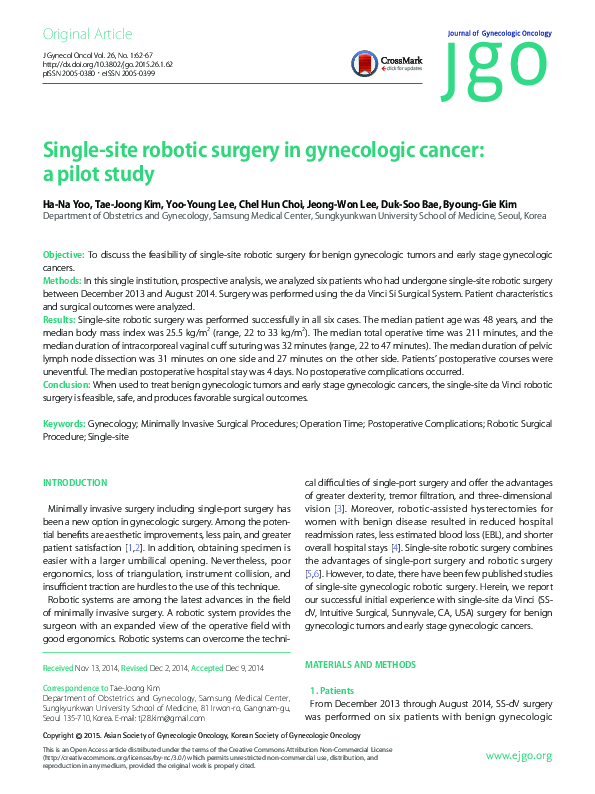
A
B
C
D
Fig. 1. The da Vinci Si Surgical system. (A) Before docking. (B) After docking. (C) Platform. (D) Abdominal wall after platform removed.
J Gynecol Oncol Vol. 26, No. 1:62-67
www.ejgo.org 63
�Ha-Na Yoo, et al.
2. Surgical techniques
Patients were placed in dorsal lithotomy positions after
anesthetization. After uterine sounding and cervical dilation,
a RUMI uterine manipulator with a Koh Colpotomizer system
(Cooper Surgical, Trumbull, CT, USA) was fixed onto the
cervix to effectively manipulate the uterus. After patients
were draped, a single 2.5- to 3-cm umbilical incision was
made using the open Hasson approach. The port was then
inserted into the abdominal cavity using atraumatic forceps.
Pneumoperitoneum was inflated at a pressure of 12 mm Hg.
The SS-dV Surgical System was docked between the patients’
legs (Fig. 1). A three-dimensional 8.5-mm endoscope was
used, along with two trocars for the robotic instruments. The
assistant’s trocar was then inserted and used as a laparoscopic
A
B
C
D
Fig. 2. (A) Lymph node dissection with assistant's grasper. (B) Colpotomy. (C) Intracorporeal closure of vaginal stump. (D) Postoperative view.
Table 1. Patient characteristics
Age
(yr)
BMI
(kg/m2)
No. of previous
abdominal surgery
1
52
26
0
Right ovary mucinous cystadenoma
SS-dV H, bilateral SO
2
39
23
2
Cervical cancer Ia1
SS-dV H (s/p conization)
3
39
33
0
Endometrial cancer Ia, grade 1
SS-dV H, right SO, left salpingectomy, left PLND
4
71
26
0
Endometrial cancer IIIc, grade 1
SS-dV H, bilateral SO, bilateral PLND
5
48
23
0
Endometrial ca Ia, grade 1
SS-dV H, bilateral SO, bilateral PLND
6
41
22
1
Ovarian cancer Ia, grade 3 (clear cell type)
Single-port laparoscopic left SO, omentectomy,
PaLND SS-dV bilateral PLND
Case
Diagnosis
Operation
BMI, body mass index; H, hysterectomy; PaLND, para-aortic lymph node dissection; PLND, pelvic lymph node dissection; SO, salpingooophorectomy; SS-dV, single site da Vinci.
64
www.ejgo.org
http://dx.doi.org/10.3802/jgo.2015.26.1.62
�J Gynecol Oncol Vol. 26, No. 1:62-67
EBL, estimated blood loss; NA, not available; PLND, pelvic lymph node dissection; SS-dV, single-site da Vinci.
211
Median
6
17
16
140
12
13
3
32
31
27
125
4
None
4
<50
26 (12)
20 (10)
NA
NA
NA
NA
NA
NA
10
193
6
None
6
100
15 (9)
33 (7)
22
4
18
11
15
15
11
5
6
4
249
237
3
5
None
4
150
32 (10)
39 (11)
NA
NA
NA
17
15
9
15
243
2
5
None
3
<50
33 (9)
NA (0)
47
2
17
9
24
19
32
164
1
10
None
3
200
NA
NA
28
3
7
13
24
16
20
178
Case no.
5
3
200
NA
NA
32
3
9
12
24
22
15
Step 5:
specimen
removal
Step 4:
colpotomy
Step 3:
vesico-uterine
reflection
Step 2:
left side
dissection
Total
operation
time
(min)
SS-dV
platform
insertion
(min)
Patient
cart
docking
(min)
Step 1:
right side
dissection
Hysterectomy & adnexectomy time (min)
Table 2. Surgical outcomes of single-site robotic surgery
5
Right
Cuff
closure
time
(min)
RESULTS
SS-dV surgery was successfully completed in six patients between December 2013 and August 2014. Table 1 lists patient
characteristics, diagnoses, and operation names. Five of the
patients underwent SS-dV hysterectomy. The median patient
age was 48 years (range, 52 to 71 years) and the median body
mass index (BMI) was 25.5 kg/m2 (range, 22 to 33 kg/m2). In
Case no. 3, there was difficulty in placing the platform due to
the patient’s obesity (BMI, 33 kg/m 2), necessitating the use
of a wound retractor (Alexis, Applied Medical, Rancho Santa
Margarita, CA, USA). Platform insertion therefore took 10
minutes in this case. One operation was performed on benign
gynecologic tumor while the remaining five were performed
on presumed early stage gynecologic cancers.
Table 2 shows the operative times, EBL, postoperative hospital stays, and postoperative complications. The median total
operative time was 211 minutes. The median intracorporeal
vaginal cuff suturing time was 32 minutes (range, 22 to 47
minutes). In Case no. 4, the RUMI uterine manipulator could
not be used owing to vaginal tightness. Instead, the surgeon
resected and sutured the vaginal cuff with an extracorporeal
approach. PLND was successfully performed in four out of six
cases. The median PLND time was 31 minutes on one side and
27 minutes on the other. In Case no. 3, only a left lymph node
dissection (LND) was performed. In the other cases, bilateral
pelvic lymph nodes were dissected. None of the operations
was converted to open surgery. The postoperative course
was uneventful in all patients. The median hospital stay was 4
days. The median EBL was 125 mL (range, 50 to 200 mL). None
Left
PLND (min)
(No. of dissected
lymph node)
EBL
(mL)
Postoperative
hospital stay Complications
(day)
grasper (Fig. 2). To reduce collision, the assistant’s instrument
was placed underneath the camera. Since a bipolar device
specific to the SS-dV system was not available to us, advanced
bipolar devices operated by an assistant were used in all our
cases. The general procedure was similar to the previously
described single-port surgery procedure [7]. A 37-cm LigaSure
blunt tip (Valleylab, Covidien, Mansfield, MA, USA) was used
in the first case and a 45-cm Enseal G2 (Ethicon Endo Surgery
Inc., Cincinnati, OH, USA) was used in the remaining cases. A
roticulator grasper (Covidien, Mansfield, MA, USA) was also
used. Vaginal cuff closure was performed using a needle
driver and a Maryland dissector with V-loc 2-0 sutures. During
cuff closure, pneumoperitoneum was maintained with a
saline-filled glove ball. The umbilical incision was repaired
with an absorbable suture layer by layer. The skin was then
approximated using Dermabond skin adhesive (Johnson &
Johnson, New Brunswick, NJ, USA).
None
Single-site robotic surgery in gynecologic cancer: a pilot study
www.ejgo.org 65
�Ha-Na Yoo, et al.
of the patients received a transfusion. There were no other
postoperative complications.
DISCUSSION
Single-incision and single-port surgeries have recently
become the preferred surgical methods, involving less blood
loss, shorter hospital stays, and improved recovery time [8].
However, there are limitations to these techniques including poor ergonomics and loss of triangulation. Surgeons
must cross hands inside the abdomen, leading to fatigue
and decreased performance. However, the application of
robotic-assisted techniques can overcome these difficulties.
Robotic-assisted surgery provides better ergonomics with
3-dimensional visualization and a superior range of motion
compared to conventional single-port surgery [9]. In addition,
single-port surgery has the advantages of minimal scarring,
minimal pain, low blood loss, and high patient satisfaction [10].
Thus, the da Vinci Si Surgical System represents a new angle in
gynecologic surgery.
While it has gained popularity among surgeons, there are
few available reports on single-site robotic surgery. The first
single-site robotic surgery in humans was reported by Kaouk
et al. in the urology field [11]. Nam et al. [5] reported seven
cases of robotic single-port transumbilical total hysterectomy.
Kaouk et al. [11] and Nam et al. [5] performed single-site
robotic surgery without the SS-dV platform. PLND is also feasible. Scheib and Fader [12] performed robotic single-site surgery on 40 patients with benign and malignant gynecologic
conditions. Tateo et al. [13] presented a case report of robotic
single-site pelvic lymphadenectomy in endometrial cancer.
The robotic surgery using single-site instruments provides
surgeons with greater control, precision, better ergonomics,
and improved visualization.
There are several exceptional features to our case series. To
the best of our knowledge, this is the first study to report on
SS-dV surgery for early stage gynecologic cancers and benign
tumors in Korea. The robotic system affords fine movement
and tremor control [14]. In four out of six cases, the surgeon
successfully accomplished PLND. In all cases, there were no
postoperative complications.
In all surgeries, no major bleeding occurred during the operation. As a result, the median EBL was only 125 mL. A bedside
assistant used a suction and irrigation system to manage
minor bleeding, which requires close collaboration between
the operator and assistant. With the operator exercising
experienced control in handling the scope, the assistant’s
instrument can reach the target point with a better view and
66
www.ejgo.org
less between-instrument collision.
With Case no. 3, there was difficulty placing the SS-dV platform on the umbilicus due to obesity. We were able to place
the platform with the help of a wound retractor. The current
SS-dV platform is problematic for obese patients and requires
improvement.
There have been some reports on LND performed with the
SS-dV. Tateo et al. [13] described the feasibility of single-site
robotic surgery for PLND using bipolar forceps and a monopolar hook. In our study, the surgeon successfully dissected the
pelvic lymph nodes in four cases. While assisted by a roticulator grasper, dragging the obliterated hypogastric artery to the
medial side simplified the procedure. This required collaboration with an assistant surgeon. When dissecting pelvic lymph
nodes, the surgeon switched the position of the instruments
between hands. This was to avoid collision between the instruments inside the abdomen. For example, when dissecting
the right lymph node, the surgeon would hold the monopolar
hook in his right hand while pulling the lymph node to the
left with a Maryland dissector held in his left hand. When dissecting the left lymph node, the operator dragged the lymph
node to the right with a Maryland dissector in his right hand
and so on. To remove the dissected lymph nodes, a 5-mm
cannula was changed to a 10-mm cannula at the end of the
surgery. Then, dissected lymph nodes were removed from
the pelvic cavity with an endobag. A PaLND is barely possible
to perform at present because there is too much proximity
between the umbilicus and the operative field for the current
guidewire to work.
The most challenging procedure was the vaginal cuff closure.
Using a long cannula would have made the procedure
easier; however, the short one had to be used due to the
inconvenience of changing guide cannula. Since the surgeon
used a semiflexible instrument with a short guidewire, it was
difficult to build up sufficient force for closure. Moreover, the
non-flexible endo-wristed needle driver represented another
obstacle. With Case no. 5, we used a long guide cannula (30
cm) instead, which shortened the operation time. According
to Scheib and Fader [12], moving the distal portion of the
cannula in closer proximity to the surgical field may provide
some rigidity. Recently, the Single-Site Wristed Needle Driver
(Intuitive Surgical) received Food and Drug Administration
clearance for use with the da Vinci Si Surgical System. Its tip
has up to 45 degrees of motion in all directions as well as
serrated jaws to facilitate needle handling. This provides surgeons with precision and the ability to overcome challenges
in suturing the vaginal cuff.
Single-site robotic surgery is still in its infancy. Ours is a pilot
study reporting on the first few cases of single-site robotic
http://dx.doi.org/10.3802/jgo.2015.26.1.62
�Single-site robotic surgery in gynecologic cancer: a pilot study
surgery. Although there are some limitations, the present
cases demonstrate the feasibility and safety of this procedure.
Further studies are strongly recommended to fully appreciate
the advantages of single-site robotic surgery and identify
ways to overcome its shortcomings.
Gynecol Oncol 2011;22:120-6.
6. Park SY, Jeong W, Choi YD, Chung BH, Hong SJ, Rha KH. Yonsei
experience in robotic urologic surgery-application in various
urological procedures. Yonsei Med J 2008;49:897-900.
7. Fader AN, Escobar PF. Laparoendoscopic single-site surgery (LESS)
in gynecologic oncology: technique and initial report. Gynecol
Oncol 2009;114:157-61.
8. Jernigan AM, Auer M, Fader AN, Escobar PF. Minimally invasive
surgery in gynecologic oncology: a review of modalities and the
literature. Womens Health (Lond Engl) 2012;8:239-50.
9. Morelli L, Guadagni S, Caprili G, Di Candio G, Boggi U, Mosca F.
Robotic right colectomy using the Da Vinci Single-Site(R) platform:
case report. Int J Med Robot 2013;9:258-61.
10. Kroh M, El-Hayek K, Rosenblatt S, Chand B, Escobar P, Kaouk J, et
al. First human surgery with a novel single-port robotic system:
cholecystectomy using the da Vinci Single-Site platform. Surg
Endosc 2011;25:3566-73.
11. Kaouk JH, Goel RK, Haber GP, Crouzet S, Stein RJ. Robotic singleport transumbilical surgery in humans: initial report. BJU Int
2009;103:366-9.
12. Scheib SA, Fader AN. Gynecologic robotic laparoendoscopic
single-site surgery: prospective analysis of feasibility, safety, and
technique. Am J Obstet Gynecol. Epub 2014 Aug 1. DOI: http://
dx.doi.org/10.1016/j.ajog.2014.07.057.
13. Tateo S, Nozza A, Del Pezzo C, Mereu L. Robotic single-site pelvic
lymphadenectomy. Gynecol Oncol 2014;134:631.
14. Mendivil A, Holloway RW, Boggess JF. Emergence of robotic
assisted surgery in gynecologic oncology: American perspective.
Gynecol Oncol 2009;114(2 Suppl):S24-31.
CONFLICT OF INTEREST
No potential conflict of interest relevant to this article was
reported.
REFERENCES
1. Uppal S, Frumovitz M, Escobar P, Ramirez PT. Laparoendoscopic
single-site surgery in gynecology: review of literature and available
technology. J Minim Invasive Gynecol 2011;18:12-23.
2. Kim YT, Kim SW, Jung YW. Robotic surgery in gynecologic field.
Yonsei Med J 2008;49:886-90.
3. Jung YW, Kim SW, Kim YT. Recent advances of robotic surgery and
single port laparoscopy in gynecologic oncology. J Gynecol Oncol
2009;20:137-44.
4. Martino MA, Berger EA, McFetridge JT, Shubella J, Gosciniak G,
Wejkszner T, et al. A comparison of quality outcome measures in
patients having a hysterectomy for benign disease: robotic vs. nonrobotic approaches. J Minim Invasive Gynecol 2014;21:389-93.
5. Nam EJ, Kim SW, Lee M, Yim GW, Paek JH, Lee SH, et al. Robotic
single-port transumbilical total hysterectomy: a pilot study. J
█
J Gynecol Oncol Vol. 26, No. 1:62-67
█
█
www.ejgo.org 67
�
 Jeong-Won Lee
Jeong-Won Lee