Systems & Control Letters 20 (1993) 279-288
North-Holland
279
Robust adaptive control of revolute
flexible-joint manipulators using
sliding technique
C h i - M a n K w a n a n d K a i S. Y e u n g
Department of Electrical Engineering, The University of Texas at Arlington, Box 19016, Arlington, TX 76019, USA
Received 26 April 1992
Revised 7 August 1992
Abstract: In this paper, we present a 3-step procedure to robustly control the revolute flexible-joint manipulator in the presence of
parameter variations and bounded input disturbances such as torque ripples. By treating the difference of motor angle and link angle as
the input to the rigid link part of the manipulator dynamics, our first step is to design a smooth adaptive reference signal for this input to
globally stabilize the rigid subsystem. The second step is to drive the difference of motor and link angles to this desired reference signal
exponentially by using sliding control. In the third step we exploit the model reduction capability of sliding control to perform the
stability analysis. It is well-known that sliding control can reduce the system order by n if the number of control inputs is n. The
exploitation of this property of sliding control makes our stability analysis a lot simpler than other approaches. Global stability in the
sense of Lyapunov can be guaranteed and errors in link position and velocity are driven to zero when the system is in sliding mode. No
weak elasticity assumption is needed.
Keywords: Adaptive control; sliding control; flexible-joint manipulators; Lyapunov function; global stability.
1. Introduction
It is quite difficult to control the flexible-joint robot manipulators because the number of degrees of
freedom is larger than the number of control inputs. There are several existing approaches to control the
system. The integral manifold approach [11] restricts the flexible-joint dynamics to lie on a suitable integral
manifold in state space. Only link position and velocity are required for implementation. The demerit is the
lack of robustness to parameter variations. Another approach is the feedback linearization method 1-10]
which uses nonlinear state transformations to convert the system to the Brunovsky form. This method,
however, requires link position, velocity, acceleration and jerk for implementation and is not robust to
parameter variations. The third class of controllers is the adaptive control approach. Spong 1,12] combined
the globally stable adaptive control law of Slotine and Li 1,8] for the rigid manipulators with an additional
correction damping term. Singular perturbation arguments were used to discuss the stability of the
closed-loop system. It has been pointed out by Ghorbel et al. 1,3] that the global convergence of the rigid link
adaptive control law and the global stability of the boundary layer do not guarantee the stability of the
closed-loop flexible-joint system. Several instability mechanisms may destroy the system if some cautions
have not been taken into account. Another disadvantage is that only the weak elasticity case has been
considered. Chen and Fu 1,1] also attempts to solve the motion control of the flexible-joint system by using
adaptive control. Their result is a local result even in the absence of parameter uncertainties. Recently
Lozano et al. 1,5] presented a globally stable adaptive control law without using acceleration measurement
for the revolute flexible-joint manipulators.
Correspondence to." C.-M. Kwan, Department of Electrical Engineering, The University of Texas at Arlington, Box 19016, Arlington,
TX 76019, USA.
0167-6911/93/$06.00 © 1993 - Elsevier Science Publishers B.V. All rights reserved
�280
C.-M. Kwan, K.S. Yeuny Robust adaptive ~ontrol O[ flexible.:joint manipulator.s
In this paper we present a robust adaptive-sliding control law for the revolute flexible-joint manipulator.
By treating the difference of motor angle and link angle as the input to the rigid link part of the manipulator
dynamics, our first step is to design a smooth adaptive reference signal for this input to globally stabilize the
rigid subsystem. The second step is to drive the difference of motor and link angles to this desired reference
signal exponentially by using sliding control. In the third step we exploit the model reduction capability of
sliding control to perform the stability analysis. It is well-known that sliding control can reduce the system
order by n if the number of control inputs is n. The exploitation of this property of sliding control makes our
stability analysis a lot simpler than other approaches [1, 4, 5]. Moreover, the external disturbances such as
torque ripples can be suppressed easily. In addition, weak joint elasticity is not needed. Global stability in the
sense of Lyapunov can be guaranteed and errors in link position and velocity are driven to zero when the
system is in sliding mode. The main advantage of this approach is that we can break up the analysis of
a complicated problem into several tractable steps. This renders both the analysis and design of complicated
systems much simpler and easier.
Our paper is organized as follows. Sectio~a 2 describes the design procedure of our approach. The study will
be divided into three cases with increasing complexity. A simple one-link example will be given in Section 3 to
illustrate our design procedure and performance. Finally some concluding remarks will be included in
Section 4.
2. Design procedure
The revolute flexible-joint manipulator model [10] can be described as follows:
D(ql)¢l + C ( q l , ¢ X ) ¢ l + G ( q l ) = K ( q 2 - ql),
(2.1)
Jq2 - K ( q l
(2.2)
- q2) = u +
D(ql ) is in R" x, and is known as the inertia matrix. C01 is a vector in R" of the Coriolis and centripetal terms.
G is the gravity vector in R". J is the motor inertia matrix in R" ×". ql, 01, ¢1, q2, q2 are vectors in R" which
denote the link angles, velocities, accelerations, motor angles, velocities, respectively. K is the joint stiffness
matrix in R" ×" which is assumed to be diagonal, d is a vector in R" of bounded external disturbances such as
torque ripples, u is a vector in R" of motor torques. The following properties of the rigid part of the
manipulator (2.1) are well known in the robotics literature [8, 12].
Property 1: D(ql) is symmetric and positive definite.
Property 2." 10(q1) - 2C(ql, ¢1) is skew-symmetric for a suitable representation C(ql, 01).
Property 3." (2.1) is linear parametrizable (LP), i.e.
/)(ql)¢1 + C(ql, ¢1)01 q- G(ql) = Y(ql, ¢1, ¢1) ~9
where Y is a matrix of known functions, oq~R' is the vector of unknown parameters.
We need the following general assumptions throughout the paper:
Assumption 1: The bounds of the unknown parameters are known a priori.
Assumption 2: qld, the desired trajectory of ql, is continuously differentiable and bounded up to
including the fourth order.
Assumption 3." ql, 01, ¢1, q2, ¢2 are measurable.
Throughout this paper, we shall define q2 - ql in (2.1) as z. Our algorithm can be divided into 3 steps.
first step is to find an adaptive reference signal zd which can globally stabilize (2.1) and drive the errors in
position and velocity to zero. The second step is to realize the signal Zd by driving z to Zd exponentially.
third step is to perform a closed-loop stability analysis when the system is in sliding mode.
and
The
link
The
�C.-M. Kwan, K.S. Yeung / Robust adaptive control of flexible-joint manipulators
281
We divide our studies into the following three cases with increasing complexity:
Case 1: Parameters are unknown except for the stiffness matrix K.
Case 2: All parameters including K = k ! are unknown.
Case 3: All parameters are unknown. K is any diagonal joint stiffness matrix.
2.1. Parameters are unknown except f o r the stiffness matrix K
Step 1. Determination of an adaptive reference signal Zd which can globally stabilize (2.1). Using the same
notations as in [12], we choose
Zd = g-1(19a + Cv + G -
(2.3a)
gDr)
where/), C and t~ represent the corresponding terms D, C and G in (2.1) with estimated parameter values,
KD is a known positive definite diagonal matrix, and
el = ql
--
qld,
lY= #ld -- A e l ,
r = #1 -- v = el + A e l ,
a = 6.
A is a positive definite diagonal matrix and is also a design parameter.
Replacing z in (2.1) by Zd in (2.3a) yields
D~ + Cr + KDr = Da + Cv + G = Y ( q l , # l , v, a)
where
6=fi-O,
C,
iT= t -G,
With the Lyapunov function candidate [12]
V = ½ rtOr + ½ el Pc, + ½ g ' r ~
and the adaptation law
(2.3b)
,9 = - F - 1 yt r
where P and F are symmetric and positive definite constant matrices. It can be easily shown [12] that (2.1) is
globally stable in the sense of Lyapunov and e~ and ~ converge to zero.
Step 2. Realization of the reference signal Zd (2.3a). After determining the form of Zd, we need to find a way
to realize it. If we define r / = z - Zd, Z = q2 -- q~, then our objective in this step is to drive r/to zero. We define
the sliding variable as
a = ~ + ~q
(2.4)
where • = diag { ~bx, ~b2. . . . . ~b,} is a positive definite matrix which determines the rate of convergence of q.
The reason for the sliding variable definition (2.4) is because, once the system is in sliding, a is confined to
zero and q will decay to zero exponentially. Hence, z is driven to Zd exponentially. Note a involves Zd which
contains the link acceleration, ~ . Since we do not know parameters exactly, we cannot substitute ql from
dynamical equation (2.1). Therefore, we need Assumption 3 of the availability of ~ so that tr is synthesizable.
Differentiating a yields
(2.5)
6" =/~ + ¢ , f / = f + J - l(u - Kz + d)
where f i s a function of q~, 41, q~, q2, #2 and derivatives of the desired trajectory q~d.
(2.5) can be expressed as
(2.6)
6 = f o + A f + (Jo + AJ)-~(u - Kz + d).
Jo and fo are the nominal values of J and f, respectively. Following Assumption 1, the bounds of unknown
parameters in D, C, G, J, K are known. A f c a n be shown to be boundable by known functions. Suppose
I(Af)~l < Fi,
I(J-Xd)~] < Li,
I(JolAJ(l+
where F~, L~ and M~j are known functions.
J o l A J))~jl < Mij,
�282
C.-M. Kwan, K.S. Yeuny. Robust adaptive control (if flexible:joint manipulators
From standard results [9] the control law is chosen as
(2.7)
u = Jo[ - ] o - k~sgn(a)] + K z
where
-kslsgn(°l)l,
k~sgn(a) =
k~,sgn(G) .]
sgn(.) is the signum function which equals 1 if ( . ) > 0 ,
according to
(l-Mii)k~i>_Fi+Li+
~ Mi;[(fo)jl+ ~
j=1
0 i f ( o ) = 0 , and - 1 if ( . ) < 0 . k~ is chosen
Mijksj+ei,
e l > O , i = 1,2 . . . . .
n.
j=~ i
This control law guarantees the following reaching condition for sliding mode: ai6"i < - e i l a ~ ] , i =
1, 2. . . . . n. Hence a goes to zero in finite time, i.e. q tends to zero exponentially. ~ determines the reaching
time to sliding. Thus the adaptive reference signal (2.3a) is realized exponentially.
Step 3. Stability analysis when system is in sliding mode. The system in sliding is described by
Di" + Cr + Kor = Y ~ + Krl,
(2.8a)
0 + 4~r/= 0,
(2.8b)
el + Ael = r.
(2.8c)
Note that q is an exponentially decaying function. It is a standard practice to neglect the term Kr/in (2.8a) in
adaptive control (see p. 213 of [6] and the arguments therein). Consider the following Lyapunov function
candidate:
1 t
V = ½rtDr + ~eIPel
+ ½,gtF,9
(2.9a)
where P, F are positive definite and symmetric constant matrices.
Differentiating (2.9a) along the trajectory of (2.8) and replacing P by 2AtKI:, yields
I) = rtDr + ½rtlOr + e~Pdl + ~ t / - ~ =
_ ~Kndl
_ e~AtKl)Ael <_ O.
(2.9b)
This shows V, r, et, ~ = r - A e l , and ~ are bounded, which in turn implies i~1 is bounded following
Assumption 2 and using (2.1). Thus we see that e~, dl are uniformly continuous as a result of the boundedness
of bl, bt. To show el, d~ go to zero as t ~ oo, we need to show in addition that e~, bl are square integrable.
Defining y = [e~ b~]t and integrating both sides of (2.9b) from t = 0 to t = ~ , we get
V(oo) - V(O) = -
y t H y dt
(2.10)
where H = diag{AtKDA, KD}.
From the boundedness of V(t), we conclude that the term on the right-hand side of (2.10) is also bounded
which implies that y is square integrable. This together with the uniform continuity and boundedness of
ei and ~ imply e~, ~ tend to zero as t ~ oe [6]. The boundedness of q2, q2 follows from (2.8b). Also zd, ~a are
bounded because they are functions of bounded quantities el, ~ , and i~.
Rem~,rk 1. When all parameters are exactly known (,,Q= 0), there is no need of adaptation and I2 is negative
definite. This shows that the system is globally asymptotically stable. Furthermore, there is no need of link
acceleration measurement because il~ can be obtained from (2.1).
�C.-M. Kwan, K.S. Yeung / Robust adaptive control of flexible-joint manipulators
283
Remark 2. When the signum functions in (2.7) are replaced by saturation functions, (2.8b) then becomes,
following notations of (2.4),
/li + ~bir/i = oi(t),
lai(t)l < fii, i = 1, 2. . . . . n.
(2.11a)
6i's are known as the sliding layer widths.
From [9], the bound for rh in (2.1 la) is given by I~(t)l -< e-¢'tlrh(0)l + 6d~bi. For ease of exposition, we set
r//(0) to zero. The case of including rh(0) in the development is straightforward. Hence
I1~/11= II['h . . . r/,-Itll < II1-1 1 . . . 1-1t6/~bll = x/n6/q9
(2.11b)
where 6 = max{6i}, 4' = min{¢~}, i = 1, 2. . . . , n.
Kr/represents a bounded noisy input to (2.8a). Using the same Lyapunov function candidate (2.9a) and
notations of (2.10) and (2.11b), V now becomes
I I = _ ~tt K D ~ 1 - - e ~ A t K o A e l
+ rtKrl = - y t H y
+yt[A
l]tKrl
-< -- )~m,n(n)l]Yll 2 + 2m,~(K)Px/~6/¢IIYll = - ~.min(n)liY[I
(
Ilyll -
2m"~(K)P'c/n6/dP)
2min(n )
where p = III- Z 1 ] ~11.
~.
The technique of 'dead zone' I-6-7, 9] can be used in the adaptation law (2.3b) by setting ,9 = 0 when
IlY II -< (2m,x(K)Px/~6/c~)/Amin(H). This guarantees that 1/is non-positive outside the 'dead zone' and hence
all parameters and e~, ~ ale bounded. The boundedness of a also guarantees the boundedness of ~/and
therefore q2, (h are bounded. Note that the size of'dead zone' depends on 6. Therefore the tradeoff between
chattering and tracking accuracy is compromised through the sliding layer width.
2.2. All parameters including K = k ! are unknown
Step 1. Determination of an adaptive reference signal Zd. Replacing K by kI in (2.1), we obtain
D~h + C(h + G = kz.
(2.12)
Dividing by k on both sides of (2.12) yields
1
[D(ql)ill + C(qt, ql)ql -~ G(q~)] = z.
(2.13)
This implies the linear parametrizability (Property 3) is still valid by just redefining the vector of unknown
parameters to account for the unknown parameter k. It is obvious that Properties 1 and 2 of the rigid
subsystem (2.1) are still valid.
We then rewrite (2.13) as Dill + Cql + G = z where D, (7, G denote D/k, C/k and G/k, respectively.
Then we choose Zd of the form
Zd = Ba + ~V + ~ -- KDr.
(2.14a)
The notations in (2.14a) have similar meanings as those in (2.3a). Substituting (2.14a) into (2.12) and using the
same procedure as in Section 2.1, we obtain the following adaptation law:
(2.14b)
= -- F - 1 y t r
where the following LP property is utilized:
+ C , + Kor = B a +
+
= ro
All the symbols here have similar meanings as in Section 2.1. Note that Y is still the same as in Section 2.1.
Steps 2 and3. The developments in these two parts are exactly analogous to Section 2.1 and hence omitted
for brevity. The closed-loop system is globally stable in the sense of Lyapunov and errors in link position and
�284
C.-M. Kwan, K.S. Yeung : Robust adaptive control of flexible-joint manipulators
velocity converge to zero when system is in sliding. The discussion of using a saturation function is also
similar to that of Section 2.1. The design procedure in this subsection will be further illustrated in an example
in Section 3 for a 1-1ink robot with strong joint flexibility.
2.3. All parameters are unknown. K is any diagonal joint stifjhess matrix
Step 1. Determination of an adaptive reference signal Zd. Multiplying by K-1 on both sides of (2.1) yields
D l q l + C l q l + G~ = Z
(2.15)
where D1, C~ and G~ denote K- 1D, K- 1C and K- ~G, respectively.
Though Properties 1 and 2 do not hold in general, equation (2.15) is still LP, i.e.
D l q l + C l q I -+ G 1 = Y l ( q l , q l , q l ) L g .
We will use Craig's adaptive law [2] to design the reference signal Zd because this approach does not require
the skew-symmetry property of (2.15). Zd is then chosen as
Zd ---~/)l(qld -- Kvel -- Kpex) + C t q l + G1
(2.16)
where Kv, Kp are n x n diagonal positive definite matrices.
Substituting (2.16) into (2.15) gives
Dlql + Clql + G1 =
D1(¢Id-- Kvel
-- Kpel) + ~'1 + (~1.
(2.17)
Adding and subtracting/)~/i on the left-hand side of (2.17) yields
151[~ + Kvi~ + Kpe1]
=
/)lql
+
Clql
+ G1 =
(2.18)
Y1 ~
where (;)1 = (;)1 - ( ' ) i .
The error dynamics is then given by
~ + K~
(2.19)
+ Kpel = D;1 y ~
(2.19) can be expressed in state-space form:
(2.20)
fg = A X -'~ BD 1 1 El ~
where
A =
[
0
--Kp
' ]'
-K~
S = [0],
x:
Fell
Lell'
~ : ~-- tg.
Choose the Lyapunov function candidate
(2.21)
V = ½ x t p x + ½,gtro
where P and F are positive definite and symmetric matrices. Taking the derivative of (2.21) along the
trajectory of (2.19) yields
(2.22)
i~ = _ ½ x t Q x + ,~t/-~ + ~ t y ~ l ~ [ 1 B t p x
where A t p + P A = -
Q, Q =
Qt > O.
The adaptation law is chosen as
O= - F - ~ Y~ Ig~' BtPx.
^
(2.23)
It should be noted that parameter projection is needed to ensure the invertibility of D1-t [2].
Substituting (2.23) into (2.22), we get
I) = - ½xtQx.
(2.24)
�C.-M. Kwan, K.S. Yeun 9 / Robust adaptive control of flexible-joint manipulators
285
Following a quite similar argument as in Step 3 below (or see Craig [2]), it can be shown that x tends to zero
as t--* ~ .
Step 2. Realization of zd. Define the sliding variable as
a = 0 + ¢,r/
(2.25)
where r / = z - zd, z = qz - ql. Following a similar procedure as in Section 2.1, a control law can be chosen
to satisfy the sliding condition ai#~ < - e~lail, i = 1, 2 . . . . . n.
Step 3. Stability analysis of system in sliding mode. When the system is in sliding mode, the behavior of the
system is described by
Yc = A x + BD? 1 Y1 ~ + BD? a~l,
(2.26a)
0 + q'n = 0.
(2.26b)
Similar to Step 3 of Case 1, we neglect the effect of t/ because r/ is exponentially decaying. Choose the
following Lyapunov function candidate:
V = ½ x t p x + ½~tF~
(2.27)
Using adaptation law (2.23), it can be shown that
(7 = _ ½xt Qx.
(2.28)
Hence /2 < 0. This implies x e L ~ " , ~ e L L . It follows that zd is bounded, which in turn shows, using
Assumption 2 and (2.15) that i~1 is bounded. Hence a~EL~". The boundedness of a~ implies x is uniformly
continuous. Now we need to show that x is square integrable. Integrating both sides of (2.28) leads to the
conclusion that x is square integrable (see similar arguments as in Step 3 of Section 2.1). Thus x is bounded,
uniformly continuous and square integrable. This implies x --+ 0 and t + 00 [6]. The boundedness of q2,
q2 can be concluded from the boundedness of r/.
Remark 3. The case of using saturation function instead of signum function is completely analogous to the
discussion in Section 2.1 and is hence omitted here.
3. Example
We consider the same one-link example as in [12].
lgtl + M g L s i n ( q l ) = k(q2 - qt),
(3.1a)
J?12 - k(ql - q2) = u + d.
(3.1b)
d is a bounded disturbance which is chosen as 0.5 sin(t)Nm in this example.
Defining z = q2 - ql, we then rewrite (3.1a) as
I
MgL
/h + T
sin(q1) = z.
(3.2)
The unknown parameter vector in (3.2) is ,9t = [Ilk, M g L / k ] t.
We assume the following values for the parameters in (3.1). The nominal values of I, J, M g L and k are
Io = 1 kgm 2, Jo = 1 kgm 2, (MgL)o = 10 Nm, ko = 5 N m / r a d , respectively. The parameter uncertainties in
I, J, M g L , k are AI = 0.1 kgm 2, A J = 0.1 kgm 2, A M g L = 5 Nm, Ak = 2.5 Nm/rad, respectively. It should be
noted that the stiffness constant k is much smaller than the value of k = 1600 N m / r a d in [12]. This illustrates
that our method can handle very flexible manipulators.
�286
C.-M. Kwan, K.S. Yeung Robust adaptit;e control of flexible-joint manipulator.s
qz
O,
(tad.)
@
l
tmae(sec)
error in link angle
el
0.1~1
<ta°~-a.ml1 \
~
O
i
2
~
~
t0
time(see)
9L -O.|U
(rad.sec. a)
-0.~
O
|
0
,
2
4
5
8
LO
time(sec)
92
(tad.)
time (se~)
controlutorque 1 ~ ~ 5 ( i
(Nm)
O
"-
0
|
rune(sec)
8
sliding s a b l e it
e
,i
~
d
lb
(sec)
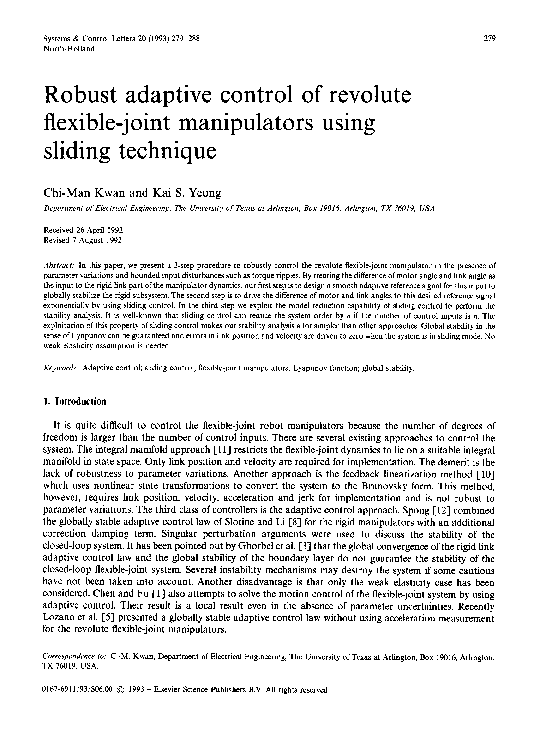
Fig. 1. Simulation results of a one-link flexible-joint manipulator.
4. E4.
link ~ngle
3. £4.
^
02 2.t4,
el
(rad.)
(rad.) 1.[4,
=I0
2
5. [9
4
5
Ume (sec)
time (see)
1. tl~
4. [9
control torque
2.E8
(Nrn)
u
(rad.sec. z)
time Csee)
5.L14
time (see)
Fig. 2. Simulation result of Spong's adaptive controller.
�C.-M. Kwan, K.S. Yeung / Robust adaptive control of flexible-joint manipulators
287
Our first step is to determine a smooth adaptive reference signal which can stabilize (3.1). Following the
procedures in Section 2.2, we can design the following reference signal:
(3.3)
Zd = ~la + ~2sin(ql) -- kDr
where (units are omitted for brevity)
qld
----
1 - - e -t,
a
:
qld
F = el
-- '~el,
÷ 2el,
ko = 10,
,L = 1.
The parameter update law is given by
,91 = -- gtar,
,92
=
--
g2sin(ql)r,
according to (2.14b) gl, g2 are chosen to be 1 and 80 respectively.
For the convergence of z to the reference signal Zd, we define r/= z - Zd, Z = q2
variable as
a = 0 + ~br/
--
ql, and the sliding
(3.4)
where ~b is chosen to be 25.
Differentiating (3.4) and using (3.1), we get
6 =f+ J-l(u-
(3.5)
kz + d)
where
/ = ~r) + (~12 + kD)
ho = - (glar - ko)el
~
÷
~---41COS(q,)--qld]j+ho,
gla2(el ÷ t~el) ÷ 2 g l a ( q ~ ) -- ~ l ) r
- - ,91qld^
(4)
÷ glarqld(3)
÷ rg2 sin (2ql)41 + (el + ~b~l)g2 sinE(q1 ) - 32 cos (ql)01
^
÷ ,9242 sin(q1) ÷ 0.5 g2rsin(2ql)41 + koq~el
Following the procedures in Section 2, the control law u is chosen as
u = [f~ - ks(t)sat(a/6)]
where
a=koz
+ Jo [ - h o - ~ b r l - ( ~ 1 2
+kD)
(3)'~1
ToZ~,~,cos(ql)-qld)|,
(ko.(MgL)oz
ks(t)= ~ 0.5~1(~12 + kD)~l +0.5----)-~o 10, cos(q~)l + 10 +(8-- 1)lal,
1
Jo
fl -< Jo + A-------J -< ~
(= 1.1 in this example).
The sliding layer width 6 is chosen to be 0.1 radian per second. All simulations are performed using
SIMNON Version 3.1. Simulation results are shown in Figure 1. It is seen that the performance is very good.
We have also tried to use Spong's adaptive controller. The system was unstable as shown in Figure 2 because
of the strong flexibility k = 7.5 Nm/rad in this example, as compared to k = 1600 Nm/rad in [12].
4. Conclusion
A method of combining sliding and adaptive techniques to control the revolute flexible-joint manipulators
is presented. Global stability in the sense of Lyapunov can be guaranteed and errors in link position and
�288
C.-M. Kwan, K.S. Yeung / Robust adaptive control qf./texible-joint manipulators
velocity are driven to zero when the system is in sliding mode. No assumption of weak elasticity is needed.
Our method can also easily suppress input disturbances such as torque ripples. This approach of breaking up
a difficult problem into several tractable steps gives a simpler and easier way of analysis and design. The idea
here has potential applications in other complicated systems such as the flexible-link manipulators and the
force control of multi-link flexible-joint robots.
Acknowledgments
The authors would like to thank the anonymous reviewers for their many constructive suggestions and
comments that lead to a smoother presentation.
References
[1] K.P. Chen and L.C. Fu, Nonlinear adaptive motion control for a manipulator with flexible joints, in: Proc. IEEE Int. Conj'.
Robotics and Automation, 1989.
[2] J.J. Craig, Adaptive Control of Mechanical Manipulators (Addison-Wesley, Reading, MA, 1988).
[3] F. Ghorbel, J.Y. Hung and M.W. Spong, Adaptive control of flexible joint manipulators, IEEE Control Systems Magazine 9 (1989)
9-13.
[4] K.Y. Lian, J.H. Jean and L.C. Fu, Adaptive force control of single-link mechanism with joint flexibility, IEEE Trans. Robotics and
Automation 7 (1991) 540-545.
[5] R. Lozano and B. Brogliato, Adaptive control of robot manipulators with flexible joints, IEEE Trans. Automat. Contr. 37 (1992)
174 181.
[6] K.S. Narendra and A.M. Annaswamy, Stable Adaptive Systems (Prentice-Hall, Englewood Cliffs, N J, 1989).
[7] J.E. Slotine and J.A. Coetsee, Adaptive sliding controller synthesis for nonlinear systems, Int. J. Control 48 (1986) PAGES?
[8] J.E. Slotine and W. Li, Adaptive manipulator control: A case study, IEEE Trans. Automat. Control 33 (1988) 995-1003.
[9] J.E. Slotine and W. Li, Applied Nonlinear Control (Prentice-Hall, Englewood Cliffs, NJ, 1991).
[10] M.W. Spong, Modelling and control of elastic joint manipulators. J. Dynam. Systems Measurement Control 109 (1987) 310-319.
[11] M.W. Spong, K. Khorasani and P.V. Kokotovic, An integral manifold approach to the feedback control of flexible joints robots,
IEEE J. Robotics and Automation 3 (1987) 291-300.
[12] M.W. Spong, Adaptive control of flexible joint manipulators, Systems Control Lett. 13 (1989) 15-21.
�
 CHIMAN KWAN
CHIMAN KWAN