KR102809452B1 - Robot-friendly building, method and system for collaboration using multiple robots - Google Patents
Robot-friendly building, method and system for collaboration using multiple robots Download PDFInfo
- Publication number
- KR102809452B1 KR102809452B1 KR1020240018733A KR20240018733A KR102809452B1 KR 102809452 B1 KR102809452 B1 KR 102809452B1 KR 1020240018733 A KR1020240018733 A KR 1020240018733A KR 20240018733 A KR20240018733 A KR 20240018733A KR 102809452 B1 KR102809452 B1 KR 102809452B1
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- task
- information
- building
- robots
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1682—Dual arm manipulator; Coordination of several manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0045—Manipulators used in the food industry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1661—Programme controls characterised by programming, planning systems for manipulators characterised by task planning, object-oriented languages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1669—Programme controls characterised by programming, planning systems for manipulators characterised by special application, e.g. multi-arm co-operation, assembly, grasping
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/244—Arrangements for determining position or orientation using passive navigation aids external to the vehicle, e.g. markers, reflectors or magnetic means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/692—Coordinated control of the position or course of two or more vehicles involving a plurality of disparate vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Human Computer Interaction (AREA)
- Life Sciences & Earth Sciences (AREA)
- Food Science & Technology (AREA)
- Manipulator (AREA)
- Multimedia (AREA)
Abstract
본 발명에 따른 복수의 로봇들을 이용한 협업 방법은, 제1 기능을 수행하는 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업이 수행되는 단계, 상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한, 상기 제1 기능과 다른 제2 기능을 수행하는 제2 로봇을 센싱하는 단계, 상기 제1 로봇에서 상기 제2 로봇이 센싱되는 것에 근거하여, 상기 제2 로봇이, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정되는 단계, 상기 제1 로봇 및 상기 제2 로봇 간의 데이터 통신에 근거하여, 상기 제1 로봇 및 상기 제2 로봇들에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되는 단계 및 상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업이 수행될 수 있다. A collaboration method using a plurality of robots according to the present invention comprises the steps of: assigning a specific task to a first robot performing a first function, and performing a first task related to the specific task in the first robot; sensing, in the first robot, a second robot located around the first robot and performing a second function different from the first function; specifying, based on the sensing of the second robot by the first robot, the second robot as a collaboration target robot that will collaborate with the first robot on the specific task; performing, based on data communication between the first robot and the second robot, a second task related to the specific task by the first robot and the second robot; and performing, based on the completion of the second task, a third task related to the specific task in the second robot.
Description
본 발명은 로봇 간 협업을 위한 방법 및 시스템에 관한 것이다. 보다 구체적으로 본 발명은 오프라인 상황에서도 로봇 간 협업 임무가 가능하도록 로봇 간 통신을 수행하는 방법에 관한 것이다. The present invention relates to a method and system for collaboration between robots. More specifically, the present invention relates to a method for performing communication between robots so as to enable collaborative tasks between robots even in an offline situation.
나아가, 본 발명은 로봇 친화형 건물에 적용될 수 있는 로봇 간 협업 임무를 위한 방법 및 시스템에 관한 것이다Furthermore, the present invention relates to a method and system for robot-to-robot collaborative tasks applicable to robot-friendly buildings.
기술이 발전함에 따라, 다양한 서비스 디바이스들이 나타나고 있으며, 특히 최근에는 다양한 작업 또는 서비스를 수행하는 로봇에 대한 기술 개발이 활발하게 이루어지고 있다.As technology advances, various service devices are appearing, and in particular, technology development for robots that perform various tasks or services is actively underway recently.
나아가 최근에는, 인공 지능 기술, 클라우드 기술 등이 발전함에 따라, 로봇을 보다 정밀하고, 안전하게 제어하는 것이 가능해지고 있으며, 이에 따라 로봇의 활용도가 점차적으로 높아지고 있다. 특히, 기술의 발전으로 인하여, 로봇은 실내 공간에서 인간과 안전하게 공존할 수 있을 정도의 수준에 이르렀다.Furthermore, with the recent development of artificial intelligence technology, cloud technology, etc., it is becoming possible to control robots more precisely and safely, and accordingly, the utilization of robots is gradually increasing. In particular, due to the development of technology, robots have reached a level where they can safely coexist with humans in indoor spaces.
이에, 최근에는 로봇이 인간의 업무 또는 작업을 대체하고 있으며, 특히 실내 공간에서 사람을 대상으로 로봇이 직접 서비스를 제공하는 다양한 방법들이 활발하게 연구되고 있다. Accordingly, robots are recently replacing human work or tasks, and various methods for robots to directly provide services to people, especially in indoor spaces, are being actively studied.
예를 들어, 공항, 역사, 백화점 등 공공 장소에서는 로봇들이 길안내 서비스를 제공하고 있으며, 음식점에서는 로봇들이 서빙 서비스를 제공하고 있다. 나아가, 오피스 공간, 공동 주거 공간 등에서는 로봇들이 우편물, 택배 등을 배송하는 배송 서비스를 제공하고 있다. 이 밖에도 로봇들은 청소 서비스, 방범 서비스, 물류 처리 서비스 등 다양한 서비스들을 제공하고 있으며, 로봇이 제공하는 서비스의 종류 및 범위는 앞으로도 기하급수적으로 늘어날 것이며, 서비스 제공 수준 또한 계속적으로 발전할 것으로 기대된다.For example, in public places such as airports, stations, and department stores, robots provide guidance services, and in restaurants, robots provide serving services. Furthermore, in office spaces and shared living spaces, robots provide delivery services, delivering mail and packages. In addition, robots provide various services such as cleaning services, security services, and logistics processing services, and the types and scope of services provided by robots are expected to increase exponentially in the future, and the level of service provision is also expected to continue to develop.
이러한, 로봇들은 실외 공간 뿐만 아니라, 사무실, 아파트, 백화점, 학교, 병원, 놀이시설 등과 같은 건물(또는 빌딩(building))의 실내 공간 내에서 다양한 서비스를 제공하고 있으며, 이 경우, 로봇들은 건물의 실내 공간을 이동하며 다양한 서비스들을 제공하도록 제어되고 있다.These robots provide various services not only in outdoor spaces but also in indoor spaces of buildings (or premises) such as offices, apartments, department stores, schools, hospitals, and amusement facilities. In this case, the robots are controlled to move around the indoor spaces of the buildings and provide various services.
한편, 로봇들이 실내 공간에서 양한 서비스를 제공하거나, 생활하기 위해서는 로봇들은, 협업을 수행하여야 하며, 경우에 따라 네트워크가 부재하는 오프라인 상황에서도 로봇간 협업을 수행해야 하는 니즈가 존재한다. Meanwhile, in order for robots to provide various services or live in indoor spaces, they must collaborate, and in some cases, there is a need for robots to collaborate with each other even in offline situations where there is no network.
이에, 건물 내에서 로봇을 이용한 보다 수준 높은 서비스를 제공하기 위해서는 네트워크가 존재하는 상황에서의 로봇 제어 기술에 대한 연구 뿐만 아니라, 오프라인 상황에서도 로봇간 협업을 통해 서비스를 제공할 수 있는 방법에 대해서 본질적인 연구가 필요하다.Accordingly, in order to provide higher-level services using robots in buildings, not only research on robot control technology in situations where a network exists, but also fundamental research on methods for providing services through collaboration between robots even in offline situations is necessary.
본 발명에 따른 로봇 협업 방법 및 시스템은 오프라인 상황에서도 로봇간 협업이 가능한 프로세스를 제공하기 위한 것이다. The robot collaboration method and system according to the present invention are intended to provide a process that enables collaboration between robots even in offline situations.
보다 구체적으로, 본 발명에 따른 로봇 협업 방법 및 시스템은 시각적 수단을 이용하여 로봇간 통신을 수행함으로써, 네트워크 부재 상황에서도 로봇간 협업이 가능한 프로세스를 제공하기 위한 것이다. More specifically, the robot collaboration method and system according to the present invention provides a process in which robot collaboration is possible even in the absence of a network by performing robot-to-robot communication using visual means.
나아가, 본 발명은 로봇과 사람이 함께 공존하며, 사람에게 유용한 서비스를 제공하는 로봇 친화형 건물을 제공하기 위한 것이다.Furthermore, the present invention provides a robot-friendly building in which robots and people coexist and provide useful services to people.
나아가, 본 발명에 따른 로봇 친화형 건물은, 로봇이 이용 가능한 로봇 친화형의 다양한 설비 인프라를 제공함으로써, 로봇이 제공할 수 있는 서비스의 종류 및 범위를 확장할 수 있다.Furthermore, the robot-friendly building according to the present invention can expand the types and scope of services that robots can provide by providing various robot-friendly facility infrastructures that can be used by robots.
나아가, 본 발명에 따른 로봇 친화형 건물은 다수의 로봇과 연동하는 클라우드 시스템을 이용하여, 다수의 로봇 및 설비 인프라를 유기적으로 제어함으로써, 보다 체계적으로 서비스를 제공하는 로봇의 주행을 관리할 수 있다. 이를 통해, 본 발명에 따른 로봇 친화형 건물은, 보다 안전하고, 신속하게, 그리고 정확하게 사람들에게 다양한 서비스를 제공할 수 있다.Furthermore, the robot-friendly building according to the present invention can manage the operation of robots that provide services more systematically by organically controlling a plurality of robots and facility infrastructure using a cloud system that is linked to a plurality of robots. Through this, the robot-friendly building according to the present invention can provide various services to people more safely, quickly, and accurately.
나아가, 본 발명에 따른 건물에 적용된 로봇은 클라우드 서버에 의해 제어되는 브레인리스(brainless) 형식으로 구현될 수 있으며, 이에 의하면, 건물에 배치되는 다수의 로봇을 값비싼 센서 없이 저렴하게 제조할 수 있을 뿐만 아니라, 고성능/고정밀로 제어할 수 있다.Furthermore, the robot applied to the building according to the present invention can be implemented in a brainless format controlled by a cloud server, and according to this, not only can a large number of robots placed in the building be manufactured inexpensively without expensive sensors, but they can also be controlled with high performance/high precision.
본 발명에 따른 복수의 로봇들을 이용한 협업 방법은, 제1 기능을 수행하는 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업이 수행되는 단계, 상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한, 상기 제1 기능과 다른 제2 기능을 수행하는 제2 로봇을 센싱하는 단계, 상기 제1 로봇에서 상기 제2 로봇이 센싱되는 것에 근거하여, 상기 제2 로봇이, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정되는 단계, 상기 제1 로봇 및 상기 제2 로봇 간의 데이터 통신에 근거하여, 상기 제1 로봇 및 상기 제2 로봇들에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되는 단계 및 상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업이 수행될 수 있다. A collaboration method using a plurality of robots according to the present invention comprises the steps of: assigning a specific task to a first robot performing a first function, and performing a first task related to the specific task in the first robot; sensing, in the first robot, a second robot located around the first robot and performing a second function different from the first function; specifying, based on the sensing of the second robot by the first robot, the second robot as a collaboration target robot that will collaborate with the first robot on the specific task; performing, based on data communication between the first robot and the second robot, a second task related to the specific task by the first robot and the second robot; and performing, based on the completion of the second task, a third task related to the specific task in the second robot.
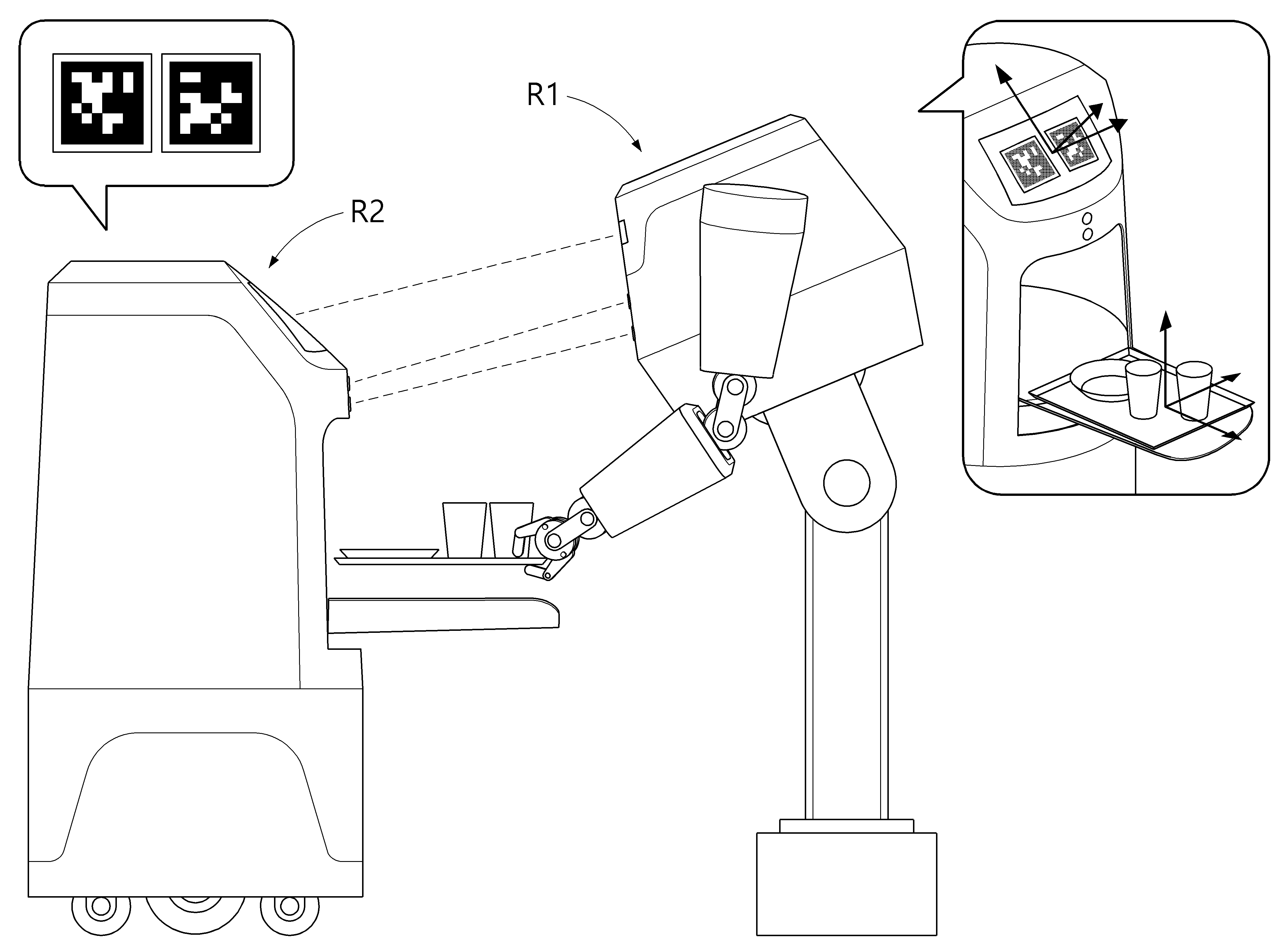
나아가, 본 발명에 따른, 공간을 주행하는 서비스 로봇은, 디스플레이부, 주행부, 및 상기 서비스 로봇의 동작 상태에 근거하여, 상기 디스플레이부에 출력되는 정보를 제어하는 제어부를 포함하고, 상기 제어부는, 상기 서비스 로봇에서, 상기 공간에 배치된 특정 로봇과 특정 임무와 관련된 협업이 진행되는 것에 근거하여, 상기 디스플레이부에 출력되는 정보를 제어하고, 상기 디스플레이부에는, 상기 특정 로봇에서 상기 서비스 로봇을 식별 가능하도록 하는 제1 마커 및 상기 서비스 로봇의 현재 동작 상태를 식별 가능하도록 하는 제2 마커가 출력될 수 있다. Furthermore, a service robot according to the present invention that navigates a space includes a display unit, a navigation unit, and a control unit that controls information output to the display unit based on an operating state of the service robot, wherein the control unit controls information output to the display unit based on collaboration between a specific robot arranged in the space and a specific task-related task, and the display unit may output a first marker that enables identification of the service robot from the specific robot, and a second marker that enables identification of the current operating state of the service robot.
나아가, 본 발명에 따른 로봇은, 협업을 수행하는 특정 로봇에 출력되는 마커를 인식하는 카메라부, 상기 특정 로봇의 동작을 제어하기 위한 제어신호를 출력하는 출력부 및 상기 카메라부 및 상기 출력부를 제어하는 제어부를 포함하고, 상기 제어부는, 상기 협업에 대응되는 특정 임무의 진행 상태에 따라 상기 특정 로봇에서 특정 동작이 이루어지도록, 상기 출력부에 대한 제어를 통해, 상기 특정 동작에 대응되는 제어 신호를 출력할 수 있다. Furthermore, a robot according to the present invention includes a camera unit that recognizes a marker output to a specific robot performing collaboration, an output unit that outputs a control signal for controlling the operation of the specific robot, and a control unit that controls the camera unit and the output unit, wherein the control unit can output a control signal corresponding to the specific operation through control of the output unit so that a specific operation is performed in the specific robot according to the progress status of a specific task corresponding to the collaboration.
나아가, 본 발명에 따른 클라우드 서버와 통신하는 제1 로봇 및 제2 로봇이 위치하는 건물은, 상기 제1 로봇 및 상기 제2 로봇이 위치하는 공간을 포함하고, 상기 제1 로봇 및 상기 제2 로봇은, 상기 클라우드 서버로부터 수신되는 제어명령에 근거하여, 제1 기능을 수행하는 상기 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업이 수행되는 단계, 상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한, 상기 제1 기능과 다른 제2 기능을 수행하는 제2 로봇을 센싱하는 단계, 상기 제1 로봇에서 상기 제2 로봇이 센싱되는 것에 근거하여, 상기 제2 로봇이, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정되는 단계, 상기 제1 로봇 및 상기 제2 로봇 간의 데이터 통신에 근거하여, 상기 제1 로봇 및 상기 제2 로봇들에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되는 단계 및 상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업이 수행되는 단계를 통해, 상기 건물에서 상기 특정 임무를 수행하고, 상기 클라우드 서버에는, 상기 제1 로봇 및 상기 제2 로봇 중 적어도 하나로부터 수신되는 작업 이력 정보에 근거하여, 상기 특정 임무에 대한 작업 입력이 업데이트될 수 있다. Furthermore, a building in which a first robot and a second robot communicating with a cloud server according to the present invention are located includes a space in which the first robot and the second robot are located, and the first robot and the second robot are configured to perform a first task associated with the specific task by assigning a specific task to the first robot performing a first function based on a control command received from the cloud server, a step of sensing, in the first robot, a second robot located around the first robot and performing a second function different from the first function, a step of specifying, based on the first robot sensing the second robot, the second robot as a collaboration target robot to collaborate with the first robot on the specific task, a step of performing a second task associated with the specific task by the first robot and the second robot based on data communication between the first robot and the second robot, and a step of performing a third task associated with the specific task by the second robot based on the completion of the second task, thereby performing the specific task in the building. In the cloud server, the task input for the specific task can be updated based on the task history information received from at least one of the first robot and the second robot.
나아가, 본 발명에 따른 제1 로봇 및 제2 로봇 간에 협업이 이루어지는 로봇 협업 시스템은, 제1 기능을 수행하는 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업을 수행하고, 상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한, 상기 제1 기능과 다른 제2 기능을 수행하는 제2 로봇을 센싱하며, 상기 제1 로봇에서 상기 제2 로봇이 센싱되는 것에 근거하여, 상기 제2 로봇을, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정하고, 상기 제1 로봇 및 상기 제2 로봇 간의 데이터 통신에 근거하여, 상기 제1 로봇 및 상기 제2 로봇들에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되고, 상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업을 수행하는 것을 통해, 상기 특정 임무에 대한 협업이 이루어질 수 있다. Furthermore, a robot collaboration system in which collaboration is achieved between a first robot and a second robot according to the present invention includes: a specific task is assigned to a first robot performing a first function; the first robot performs a first task associated with the specific task; the first robot senses a second robot located around the first robot and performing a second function different from the first function; and, based on the sensing of the second robot by the first robot, the second robot is specified as a collaboration target robot that collaborates with the first robot for the specific task; and, based on data communication between the first robot and the second robot, a second task associated with the specific task is performed by the first robot and the second robot; and, based on the completion of the second task, the second robot performs a third task associated with the specific task, thereby enabling collaboration for the specific task.
본 발명에 따른 복수의 로봇들을 이용한 협업 방법 및 시스템은, 제1 로봇 및 제2 로봇 각각에 구비된 출력부 및 센싱부 간의 데이터 통신에 근거하여, 제1 로봇 및 제2 로봇들에 의해서, 특정 임무와 관련된 협업을 수행함으로써 네트워크가 부재하거나 네트워크 장애가 발생되는 상황에서도, 협업 업무를 수행할 수 있다. 따라서, 본 발명에 따른 로봇들이 포함된 건물에서는 네트워크가 존재하지 않는 환경에서도 로봇을 복수의 로봇 간 협업 업무를 통해 다양한 서비스를 제공할 수 있어, 사용자 편의성을 더욱 향상시킬 수 있다.The collaborative method and system using a plurality of robots according to the present invention can perform collaborative work even in a situation where a network is absent or a network failure occurs by performing collaboration related to a specific task by the first robot and the second robots based on data communication between the output units and sensing units provided in each of the first robot and the second robot. Therefore, in a building including robots according to the present invention, even in an environment where a network does not exist, the robots can provide various services through collaborative work among a plurality of robots, thereby further improving user convenience.
나아가, 본 발명에 따른 로봇 친화형 건물은 로봇, 자율주행, AI, 클라우드 기술이 융합되고, 연결되는 테크 컨버전스(Technological Convergence)를 이용하며, 이러한 기술과, 로봇 그리고 건물내 구비되는 설비 인프라가 유기적으로 결합되는 새로운 공간을 제공할 수 있다.Furthermore, the robot-friendly building according to the present invention utilizes technological convergence in which robots, autonomous driving, AI, and cloud technologies are integrated and connected, and can provide a new space in which these technologies, robots, and facility infrastructure provided within the building are organically combined.
나아가, 본 발명에 따른 로봇 친화형 건물은 다수의 로봇과 연동하는 클라우드 서버를 이용하여, 다수의 로봇 및 설비 인프라를 유기적으로 제어함으로써, 보다 체계적으로 서비스를 제공하는 로봇의 주행을 체계적으로 관리할 수 있다. 이를 통해, 본 발명에 따른 로봇 친화형 건물은, 보다 안전하고, 신속하게, 그리고 정확하게 사람들에게 다양한 서비스를 제공할 수 있다.Furthermore, the robot-friendly building according to the present invention can systematically manage the operation of robots that provide services more systematically by organically controlling a plurality of robots and facility infrastructure using a cloud server that is linked to a plurality of robots. Through this, the robot-friendly building according to the present invention can provide various services to people more safely, quickly, and accurately.
나아가, 본 발명에 따른 건물에 적용된 로봇은 클라우드 서버에 의해 제어되는 브레인리스(brainless) 형식으로 구현될 수 있으며, 이에 의하면, 건물에 배치되는 다수의 로봇을 값비싼 센서 없이 저렴하게 제조할 수 있을 뿐만 아니라, 고성능/고정밀로 제어할 수 있다.Furthermore, the robot applied to the building according to the present invention can be implemented in a brainless format controlled by a cloud server, and according to this, not only can a large number of robots placed in the building be manufactured inexpensively without expensive sensors, but they can also be controlled with high performance/high precision.
나아가, 본 발명에 따른 건물에서는 건물에 배치된 다수의 로봇에 할당된 임무와 이동 상황을 고려함은 물론, 사람을 배려하도록 주행이 제어됨으로써, 같은 공간 속에서 자연스럽게 로봇과 사람이 공존할 수 있다.Furthermore, in a building according to the present invention, the driving is controlled to take into consideration the tasks and movement situations assigned to a number of robots placed in the building, as well as to take people into consideration, so that robots and people can coexist naturally in the same space.
나아가, 본 발명에 따른 건물에서는 로봇에 의한 사고 방지 및 예기치 못한 상황에 대응할 수 있도록 다양한 제어를 수행함으로써, 사람들에게 로봇이 위험한 것이 아닌, 친근하고 안전하다는 인식을 심어줄 수 있다.Furthermore, in a building according to the present invention, by performing various controls to prevent accidents caused by robots and to respond to unexpected situations, it is possible to instill in people the perception that robots are friendly and safe, rather than dangerous.
도 1, 도 2 및 도 3은 본 발명에 따른 로봇 친화형 건물을 설명하기 위한 개념도들이다.
도 4, 도 5 및 도 6은 본 발명에 따른 로봇 친화형 건물을 주행하는 로봇 및 로봇 친화형 건물에 구비된 다양한 설비를 제어하는 시스템을 설명하기 위한 개념도들이다.
도 7 및 도 8은 본 발명에 따른 로봇 친화형 건물에 구비된 설비 인프라를 설명하기 위한 개념도들이다.
도 9 내지 도 11은 본 발명에 따른 로봇 친화형 건물을 주행하는 로봇의 위치를 추정하는 방법을 설명하기 위한 개념도들이다.
도 12는 본 발명에 따른 복수의 로봇들을 이용한 협업 방법을 설명하기 위한 개념도이다.
도 13 및 도 14는 협업을 수행하는 로봇을 설명하기 위한 블록도들이다.
도 15는 본 발명에 따른 복수의 로봇들을 이용한 협업 방법 을 설명하기 위한 흐름도이다.
도 16, 도 17, 도 18 및 도 19는 본 발명에 따른 로봇에서 출력되는 정보를 설명하기 위한 개념도들이다.
도 20a 및 도 20b는 본 발명에 따른 복수의 로봇들을 이용한 협업을 위해 데이터 통신을 수행하는 방법을 설명하기 위한 개념도들이다.
도 21은 본 발명에서 로봇 간의 협업을 위한 연동을 설명하기 위한 개념도들이다.
도 22는 본 발명에 따른 로봇이 작업 이력을 업데이트 하는 것을 설명하기 위한 개념도이다.
도 23 및 도 24는 본 발명에 따른 로봇 협업에 관리자가 개입하는 방법을 설명하기 위한 개념도이다. Figures 1, 2, and 3 are conceptual diagrams illustrating a robot-friendly building according to the present invention.
FIGS. 4, 5, and 6 are conceptual diagrams for explaining a system for controlling a robot that drives a robot-friendly building and various facilities provided in the robot-friendly building according to the present invention.
Figures 7 and 8 are conceptual diagrams for explaining the facility infrastructure provided in a robot-friendly building according to the present invention.
FIGS. 9 to 11 are conceptual diagrams for explaining a method for estimating the position of a robot moving through a robot-friendly building according to the present invention.
Figure 12 is a conceptual diagram for explaining a collaboration method using multiple robots according to the present invention.
Figures 13 and 14 are block diagrams illustrating robots performing collaboration.
Figure 15 is a flow chart for explaining a collaboration method using multiple robots according to the present invention.
Figures 16, 17, 18, and 19 are conceptual diagrams for explaining information output from a robot according to the present invention.
FIGS. 20A and 20B are conceptual diagrams for explaining a method of performing data communication for collaboration using a plurality of robots according to the present invention.
Figure 21 is a conceptual diagram explaining the linkage for collaboration between robots in the present invention.
Figure 22 is a conceptual diagram explaining how a robot according to the present invention updates its work history.
FIGS. 23 and 24 are conceptual diagrams illustrating a method for a manager to intervene in robot collaboration according to the present invention.
이하, 첨부된 도면을 참조하여 본 명세서에 개시된 실시 예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 유사한 구성요소에는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 이하의 설명에서 사용되는 구성요소에 대한 접미사 "모듈" 및 "부"는 명세서 작성의 용이함만이 고려되어 부여되거나 혼용되는 것으로서, 그 자체로 서로 구별되는 의미 또는 역할을 갖는 것은 아니다. 또한, 본 명세서에 개시된 실시 예를 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 명세서에 개시된 실시 예의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다. 또한, 첨부된 도면은 본 명세서에 개시된 실시 예를 쉽게 이해할 수 있도록 하기 위한 것일 뿐, 첨부된 도면에 의해 본 명세서에 개시된 기술적 사상이 제한되지 않으며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. Hereinafter, embodiments disclosed in this specification will be described in detail with reference to the attached drawings. Regardless of the drawing symbols, identical or similar components will be given the same reference numerals and redundant descriptions thereof will be omitted. The suffixes "module" and "part" used for components in the following description are assigned or used interchangeably only for the convenience of writing the specification, and do not have distinct meanings or roles in themselves. In addition, when describing embodiments disclosed in this specification, if it is determined that a specific description of a related known technology may obscure the gist of the embodiments disclosed in this specification, the detailed description thereof will be omitted. In addition, the attached drawings are only intended to facilitate easy understanding of the embodiments disclosed in this specification, and the technical ideas disclosed in this specification are not limited by the attached drawings, and should be understood to include all modifications, equivalents, and substitutes included in the spirit and technical scope of the present invention.
제1, 제2 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.Terms including ordinal numbers, such as first, second, etc., may be used to describe various components, but the components are not limited by the terms. The terms are used only to distinguish one component from another.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.When it is said that a component is "connected" or "connected" to another component, it should be understood that it may be directly connected or connected to that other component, but that there may be other components in between. On the other hand, when it is said that a component is "directly connected" or "directly connected" to another component, it should be understood that there are no other components in between.
단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. Singular expressions include plural expressions unless the context clearly indicates otherwise.
본 출원에서, "포함한다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.In this application, it should be understood that terms such as “comprises” or “have” are intended to specify the presence of a feature, number, step, operation, component, part or combination thereof described in the specification, but do not exclude in advance the possibility of the presence or addition of one or more other features, numbers, steps, operations, components, parts or combinations thereof.
본 발명은 로봇 친화형 건물에 관한 것으로서, 사람과 로봇이 안전하게 공존하고, 나아가 건물 내에서 로봇이 유익한 서비스를 제공할 수 있는 로봇 친화형 건물을 제안한다. The present invention relates to a robot-friendly building, and proposes a robot-friendly building in which people and robots can safely coexist and, further, in which robots can provide useful services within the building.
보다 구체적으로, 본 발명은 로봇, 로봇 친화 인프라 및 이를 제어하는 다양한 시스템을 이용하여, 사람에게 유용한 서비스를 제공하는 방법을 제공한다. 본 발명에 따른 건물에서는 사람과 다수의 로봇이 공존할 수 있으며, 다수의 로봇이 건물 내에서 자유롭게 이동할 수 있는 다양한 인프라(또는 설비 인프라)가 제공될 수 있다. More specifically, the present invention provides a method for providing useful services to people by using robots, robot-friendly infrastructure, and various systems for controlling the same. In a building according to the present invention, people and a plurality of robots can coexist, and various infrastructures (or facility infrastructures) can be provided that allow a plurality of robots to move freely within the building.
본 발명에서, 건물은 지속적인 거주, 생활, 업무 등을 위하여 만들어진 구조물로서, 상업용 건물, 산업용 건물, 기관용 건물, 거주용 건물 등과 같이 다양한 형태를 가질 수 있다. 또한, 상기 건물은 복수의 층을 가진 다층 건물과 이에 반대되는 단층 건물이 될 수 있다. 다만, 본 발명에서는 설명의 편의상 다층 건물에 적용되는 인프라 또는 설비 인프라를 예시로서 설명한다.In the present invention, a building is a structure built for continuous residence, living, work, etc., and may have various forms such as a commercial building, an industrial building, an institutional building, a residential building, etc. In addition, the building may be a multi-story building with multiple floors, or a single-story building as opposed to a multi-story building. However, in the present invention, for the convenience of explanation, the infrastructure or facility infrastructure applied to a multi-story building is described as an example.
본 발명에서, 인프라 또는 설비 인프라는, 서비스 제공, 로봇의 이동, 기능 유지, 청결 유지 등을 위하여 건물에 구비되는 시설로서, 그 종류 및 형태는 매우 다양할 수 있다. 예를 들어, 건물에 구비되는 인프라는 이동 설비(예를 들어, 로봇 이동 통로, 엘리베이터, 에스컬레이터 등), 충전 설비, 통신 설비, 세척 설비, 구조물(예를 들어, 계단 등) 등과 같이 다양할 수 있다. 본 명세서에서는 이러한 설비들은 시설, 인프라, 시설 인프라 또는 설비 인프라로 명명하도록 하며, 경우에 따라 용어를 혼용하여 사용하도록 한다.In the present invention, the infrastructure or facility infrastructure refers to facilities installed in a building for providing services, moving robots, maintaining functions, maintaining cleanliness, etc., and their types and forms may vary greatly. For example, the infrastructure installed in a building may include various types of moving facilities (e.g., robot moving passageways, elevators, escalators, etc.), charging facilities, communication facilities, cleaning facilities, structures (e.g., stairs, etc.), etc. In this specification, these facilities are referred to as facilities, infrastructure, facility infrastructure, or facility infrastructure, and the terms may be used interchangeably in some cases.
나아가, 본 발명에 따른 건물에서는 건물, 건물에 구비된 다양한 설비 인프라 및 로봇 중 적어도 하나가 서로 연동하여 제어됨으로써, 로봇이 안전하고, 정확하게 건물 내에서 다양한 서비스를 제공하도록 이루어질 수 있다. Furthermore, in a building according to the present invention, at least one of the building, various facility infrastructures provided in the building, and a robot are controlled in conjunction with each other, so that the robot can safely and accurately provide various services within the building.
본 발명은 다수의 로봇이 건물 내에서 주행하고, 임무(또는 업무)에 따른 서비스를 제공하며, 필요에 따라 대기 또는 충전 기능, 나아가 로봇에 대한 수리 및 세척 기능을 지원할 수 있는 다양한 설비 인프라가 구비된 건물을 제안한다. 이러한 건물은 로봇에 대한 통합 솔루션(또는 시스템)을 제공하며, 본 발명에 따른 건물은 다양한 수식어로서 명명될 수 있다. 예를 들어, 본 발명에 따른 건물은, i)로봇이 이용하는 인프라를 구비하는 건물, ii)로봇 친화 인프라를 구비하는 건물, iii)로봇 친화형 건물, iv) 로봇과 사람이 함께 생활하는 건물, v)로봇을 이용한 다양한 서비스를 제공하는 건물과 등과 같이, 다양하게 표현될 수 있다.The present invention proposes a building equipped with various facility infrastructures that enable a plurality of robots to run within the building, provide services according to their tasks (or work), and support standby or charging functions, and further repair and cleaning functions for the robots as needed. Such a building provides an integrated solution (or system) for the robots, and the building according to the present invention can be named with various modifiers. For example, the building according to the present invention can be expressed in various ways, such as i) a building equipped with infrastructure used by robots, ii) a building equipped with robot-friendly infrastructure, iii) a robot-friendly building, iv) a building where robots and people live together, and v) a building that provides various services using robots.
한편, 본 발명에서 “로봇 친화”의 의미는, 로봇이 공존하는 건물에 대한 것으로서, 보다 구체적으로, 로봇의 주행을 허용하거나, 로봇이 서비스를 제공하거나, 로봇이 이용 가능한 설비 인프라가 구축되어 있거나, 로봇에게 필요한 기능(ex: 충전, 수리, 세척 등)을 제공하는 설비 인프라가 구축되어 있음을 의미할 수 있다. 이 경우에, 본 발명에서 “로봇 친화”는 로봇과 사람의 공존을 위한 통합 솔루션을 가지고 있다는 의미로 사용될 수 있다.Meanwhile, the meaning of “robot friendly” in the present invention refers to a building where robots coexist, and more specifically, it can mean that there is a facility infrastructure built that allows robots to run, that allows robots to provide services, that is usable by robots, or that is built to provide functions necessary for robots (ex: charging, repair, cleaning, etc.). In this case, “robot friendly” in the present invention can be used to mean that there is an integrated solution for coexistence of robots and humans.
이하에서는 첨부된 도면과 함께, 본 발명에 대해 보다 구체적으로 살펴본다.Below, the present invention will be described in more detail with reference to the attached drawings.
도 1, 도 2 및 도 3은 본 발명에 따른 로봇 친화형 건물을 설명하기 위한 개념도들이고, 도 4, 도 5 및 도 6은 본 발명에 따른 로봇 친화형 건물을 주행하는 로봇 및 로봇 친화형 건물에 구비된 다양한 설비를 제어하는 시스템을 설명하기 위한 개념도들이다. 나아가, 도 7 및 도 8은 본 발명에 따른 로봇 친화형 건물에 구비된 설비 인프라를 설명하기 위한 개념도들이다.FIGS. 1, 2 and 3 are conceptual diagrams for explaining a robot-friendly building according to the present invention, and FIGS. 4, 5 and 6 are conceptual diagrams for explaining a system for controlling a robot that drives a robot-friendly building according to the present invention and various facilities equipped in the robot-friendly building. Furthermore, FIGS. 7 and 8 are conceptual diagrams for explaining facility infrastructure equipped in a robot-friendly building according to the present invention.
먼저, 설명의 편의를 위하여, 대표적인 도면 부호를 정의하기로 한다.First, for convenience of explanation, we will define representative drawing symbols.
본 발명에서, 건물은 도면 부호 “1000”을 부여하며, 건물(1000)의 공간(실내 공간 또는 실내 영역)은 도면 부호 “10”을 부여한다(도 8 참조). 나아가, 건물(1000)의 실내 공간을 구성하는 복수의 층들(floors)에 각각 해당하는 실내 공간은 도면 부호 10a, 10b, 10c등을 부여한다(도 8 참조). 본 발명에서 실내 공간 또는 실내 영역은 건물의 외부와 반대되는 개념으로 외벽에 의하여 보호되는 건물의 내부를 의미하는 것으로서, 공간을 의미하는 것으로 한정되지 않는다.In the present invention, a building is given the drawing symbol “1000”, and a space (indoor space or indoor area) of the building (1000) is given the drawing symbol “10” (see FIG. 8). Furthermore, indoor spaces corresponding to a plurality of floors constituting the indoor space of the building (1000) are given drawing
나아가, 본 발명에서 로봇은 도면 부호 “R”을 부여하며, 도면 또는 명세서에서는 로봇에 대하여 도면 부호를 기입하지 않더라도, 모두 로봇(R)으로 이해되어질 수 있다.Furthermore, in the present invention, the robot is given a drawing symbol “R”, and even if a drawing symbol is not indicated for the robot in the drawing or specification, it can all be understood as a robot (R).
나아가, 본 발명에서 사람 또는 인간은 도면 부호 “U”를 부여하며, 사람 또는 인간은 동적인 객체로서 명명이 가능하다. 이때 동적인 객체는 반드시 사람만을 의미하는 것이 아니라, 강아지, 고양이와 같은 동물 또는 다른 적어도 하나의 로봇(예를 들어, 사용자의 개인 로봇, 다른 서비스를 제공하는 로봇 등), 드론, 청소기(예를 들어, 로봇 청소기)와 같이 움직임이 가능한 사물을 포함하는 의미로 받아들여질 수 있다.Furthermore, in the present invention, a person or a human is given the drawing symbol “U”, and a person or a human can be named as a dynamic object. At this time, the dynamic object does not necessarily mean only a person, but can be understood to include an animal such as a dog or a cat, or at least one other robot (e.g., a user’s personal robot, a robot providing other services, etc.), a drone, a vacuum cleaner (e.g., a robot vacuum cleaner), and other objects capable of movement.
한편, 본 발명에서 설명되는 건물(建物, building, structure, edifice, 1000)은 특별한 종류에 제한을 두지 않으며, 사람이 들어 살거나, 일을 하거나, 동물을 사육하거나, 또는 물건을 넣어 두기 위하여 지은 구조물을 의미할 수 있다.Meanwhile, the building (building, structure, edifice, 1000) described in the present invention is not limited to a specific type, and may mean a structure built for people to live in, work in, raise animals, or store objects.
예를 들어, 건물(1000)은 사무실, 오피스, 오피스텔, 아파트, 주상복합 아파트, 주택, 학교, 병원, 음식점, 관공서 등이 될 수 있으며, 본 발명은 이러한 다양한 종류의 건물들에 적용될 수 있다.For example, the building (1000) may be an office, an officetel, an apartment, a multi-use apartment, a house, a school, a hospital, a restaurant, a government office, etc., and the present invention may be applied to these various types of buildings.
도 1에 도시된 것과 같이, 본 발명에 따른 건물(1000)에서는 로봇이 주행하며 다양한 서비스를 제공할 수 있다.As illustrated in Fig. 1, in a building (1000) according to the present invention, a robot can move and provide various services.
건물(1000)내에는 하나 또는 그 이상의 서로 다른 종류의 복수의 로봇들이 위치할 수 있으며, 이러한 로봇들은 서버(20)의 제어 하에, 건물(1000) 내를 주행하고, 서비스를 제공하며, 건물(1000)에 구비된 다양한 설비 인프라를 이용할 수 있다.One or more different types of multiple robots may be positioned within the building (1000), and these robots may run within the building (1000), provide services, and utilize various facility infrastructures provided within the building (1000) under the control of the server (20).
본 발명에서 서버(20)의 위치는 다양하게 존재할 수 있다. 예를 들어, 서버(20)는 건물(1000)의 내부 및 건물(1000)의 외부 중 적어도 하나에 위치할 수 있다. 즉, 서버(20)의 적어도 일부는 건물(1000)의 내부에 위치하고, 나머지 일부는 건물(1000)의 외부에 위치할 수 있다. 또는, 서버(20)는 건물(1000) 내부에 모두 위치하거나, 건물(1000) 외부에만 위치할 수 있다. 이에, 본 발명에서는, 서버(20)의 구체적인 위치에 대해서는 특별한 한정을 두지 않기로 한다.In the present invention, the location of the server (20) may exist in various ways. For example, the server (20) may be located at least one of the inside of the building (1000) and the outside of the building (1000). That is, at least some of the servers (20) may be located inside the building (1000), and the remaining some may be located outside the building (1000). Alternatively, the servers (20) may be located entirely inside the building (1000), or only outside the building (1000). Accordingly, in the present invention, no particular limitation is placed on the specific location of the server (20).
나아가, 본 발명에서 서버(20)는 클라우드 컴퓨팅(Cloud Computing) 방식의 서버(클라우드 서버, 21) 및 엣지 컴퓨팅(Edge computing) 방식의 서버(엣지 서버, 22) 중 적어도 하나의 방식을 이용하도록 이루어질 수 있다. 나아가, 서버(20)는 클라우드 컴퓨팅 또는 엣지 컴퓨팅 방식 외에도, 로봇을 제어 가능한 방식이기만 하면 본 발명에 적용될 수 있다.Furthermore, in the present invention, the server (20) may be configured to use at least one of a cloud computing-type server (cloud server, 21) and an edge computing-type server (edge server, 22). Furthermore, in addition to the cloud computing or edge computing methods, the server (20) may be applied to the present invention as long as it is capable of controlling a robot.
한편, 본 발명에 따른 서버(20)는 경우에 따라, 클라우드 컴퓨팅(Cloud Computing) 방식의 서버(21) 및 엣지 컴퓨팅(Edge computing) 방식을 혼합하여 로봇 및 건물(1000)내 구비된 설비 인프라 중 적어도 하나에 대한 제어를 수행할 수 있다.Meanwhile, the server (20) according to the present invention may, in some cases, perform control of at least one of the robot and the facility infrastructure provided in the building (1000) by combining the server (21) of the cloud computing method and the edge computing method.
한편, 클라우드 서버(21)와 엣지 서버(22)에 대해서 보다 구체적으로 살펴보면, 엣지 서버(22)는 전자 장치로서, 로봇(R)의 브레인(brain)으로 동작할 수 있다. 즉 각각의 엣지 서버(22)는 적어도 하나의 로봇(R)을 무선으로 제어할 수 있다. 이 때 엣지 서버(22)는 정해지는 제어 주기에 기반하여, 로봇(R)을 제어할 수 있다. 제어 주기는 로봇(R)과 관련된 데이터를 처리(processing)하도록 주어지는 시간과 로봇(R)에 제어 명령을 제공하도록 주어지는 시간의 합으로 결정될 수 있다. 클라우드 서버(21)는 로봇(R) 또는 엣지 서버(22) 중 적어도 어느 하나를 관리할 수 있다. 이 때 엣지 서버(22)는 로봇(R)에 대응하여 서버로서 동작하고, 클라우드 서버(21)에 대응하여 클라이언트로 동작할 수 있다. Meanwhile, looking more specifically at the cloud server (21) and the edge server (22), the edge server (22) is an electronic device that can operate as the brain of the robot (R). That is, each edge server (22) can wirelessly control at least one robot (R). At this time, the edge server (22) can control the robot (R) based on a set control cycle. The control cycle can be determined as the sum of the time given to process data related to the robot (R) and the time given to provide a control command to the robot (R). The cloud server (21) can manage at least one of the robot (R) or the edge server (22). At this time, the edge server (22) can operate as a server corresponding to the robot (R) and as a client corresponding to the cloud server (21).
로봇(R)과 엣지 서버(22)는 무선으로 통신할 수 있으며, 엣지 서버(22)와 클라우드 서버(21)는 유선 또는 무선으로 통신할 수 있다. 이 때 로봇(R)과 엣지 서버(22)는, 초고신뢰 저지연 통신(ultra-reliable and low latency communications; URLLC)이 가능한 무선 네트워크를 통하여, 통신할 수 있다. 예를 들면, 무선 네트워크는 5G 네트워크 또는 WiFi-6(WiFi ad/ay) 중 적어도 어느 하나를 포함할 수 있다. 여기서, 5G 네트워크는, 초고신뢰 저지연 통신이 가능할 뿐 아니라, 초광대역 이동 통신(enhanced mobile broadband; eMBB) 및 대규모 사물 통신(massive machine type communications; mMTC)이 가능한 특징들을 가질 수 있다. 일 예로, 엣지 서버(22)는 MEC(mobile edge computing, multi-access edge computing) 서버를 포함하며, 기지국에 배치될 수 있다. 이를 통해, 로봇(R)과 엣지 서버(22) 간 통신에 따른 지연(latency) 시간이 단축될 수 있다. 이 때 엣지 서버(22)의 제어 주기에서, 로봇(R)으로 제어 명령을 제공하도록 주어지는 시간이 단축됨에 따라, 데이터를 처리하도록 주어지는 시간이 확대될 수 있다. 한편, 엣지 서버(22)와 클라우드 서버(21)는, 예컨대 인터넷(internet)과 같은 무선 네트워크를 통하여, 통신할 수 있다. The robot (R) and the edge server (22) can communicate wirelessly, and the edge server (22) and the cloud server (21) can communicate wiredly or wirelessly. At this time, the robot (R) and the edge server (22) can communicate via a wireless network capable of ultra-reliable and low latency communications (URLLC). For example, the wireless network may include at least one of a 5G network or WiFi-6 (WiFi ad/ay). Here, the 5G network may have features that not only enable ultra-reliable and low latency communications, but also enable enhanced mobile broadband (eMBB) and massive machine type communications (mMTC). For example, the edge server (22) may include an MEC (mobile edge computing, multi-access edge computing) server and may be deployed at a base station. Through this, the latency time due to communication between the robot (R) and the edge server (22) can be shortened. At this time, as the time given to provide a control command to the robot (R) in the control cycle of the edge server (22) is shortened, the time given to process data can be extended. Meanwhile, the edge server (22) and the cloud server (21) can communicate via a wireless network, such as the Internet, for example.
한편, 경우에 따라, 복수 개의 엣지 서버들은 무선 메시 네트워크(mesh network)를 통하여 연결될 수 있으며, 클라우드 서버(21)의 기능은 복수 개의 엣지 서버들에 분산될 수 있다. 이러한 경우, 어떤 로봇(R)에 대하여, 엣지 서버들 중 어느 하나가 로봇(R)을 위한 엣지 서버(22)로서 동작하고, 엣지 서버들 중 적어도 다른 하나가 엣지 서버들 중 어느 하나와 협력 하에, 로봇(R)을 위한 클라우드 서버(21)로서 동작할 수 있다. Meanwhile, in some cases, a plurality of edge servers may be connected via a wireless mesh network, and the function of the cloud server (21) may be distributed to a plurality of edge servers. In this case, for a certain robot (R), one of the edge servers may operate as an edge server (22) for the robot (R), and at least one other of the edge servers may operate as a cloud server (21) for the robot (R) in cooperation with one of the edge servers.
본 발명에 따른 건물(1000)에 형성되는 네트워크 또는 통신망은 데이터를 수집하도록 구성되는 적어도 하나의 로봇(R), 로봇(R)을 무선으로 제어하도록 구성되는 적어도 하나의 엣지 서버(22), 및 엣지 서버(22)와 연결되고, 로봇(R)과 엣지 서버(22)를 관리하도록 구성되는 클라우드 서버(21) 간의 통신을 포함할 수 있다. A network or communication network formed in a building (1000) according to the present invention may include communication between at least one robot (R) configured to collect data, at least one edge server (22) configured to wirelessly control the robot (R), and a cloud server (21) connected to the edge server (22) and configured to manage the robot (R) and the edge server (22).
엣지 서버(22)는, 로봇(R)으로부터 상기 데이터를 무선으로 수신하고, 상기 데이터를 기반으로 제어 명령을 결정하고, 로봇(R)에 상기 제어 명령을 무선으로 전송하도록 구성될 수 있다. The edge server (22) can be configured to wirelessly receive the data from the robot (R), determine a control command based on the data, and wirelessly transmit the control command to the robot (R).
다양한 실시예들에 따르면, 엣지 서버(22)는, 상기 데이터에 기반하여, 클라우드 서버(21)와 협력할 지의 여부를 판단하고, 클라우드 서버(21)와 협력하지 않아도 되는 것으로 판단되면, 정해진 제어 주기 내에서, 상기 제어 명령을 결정하고 상기 제어 명령을 전송하도록 구성될 수 있다. According to various embodiments, the edge server (22) may be configured to determine whether to cooperate with the cloud server (21) based on the data, and if it is determined that there is no need to cooperate with the cloud server (21), determine the control command and transmit the control command within a set control period.
다양한 실시예들에 따르면, 엣지 서버(22)는, 클라우드 서버(21)와 협력해야 하는 것으로 판단되면, 상기 데이터를 기반으로 클라우드 서버(21)와 통신하여, 상기 제어 명령을 결정하도록 구성될 수 있다. According to various embodiments, the edge server (22) may be configured to communicate with the cloud server (21) based on the data to determine the control command when it is determined that cooperation with the cloud server (21) is required.
한편, 로봇(R)은 제어 명령에 따라 구동될 수 있다. 예를 들면, 로봇(R)은 움직임을 변경함으로써 위치를 이동하거나 자세를 변경할 수 있으며, 소프트웨어 업데이트를 수행할 수 있다.Meanwhile, the robot (R) can be driven according to control commands. For example, the robot (R) can move its position or change its posture by changing its movement, and can perform software updates.
본 발명에서는, 설명의 편의를 위하여, 서버(20)를 “클라우드 서버”로 통일하여 명명하도록 하며, 도면 부호 “20”을 부여하도록 한다. 한편, 이러한 클라우드 서버(20)는 엣지 컴퓨팅의 엣지 서버(22)의 용어로도 대체될 수 있음은 물론이다.In the present invention, for the convenience of explanation, the server (20) is uniformly named as a “cloud server” and is given the drawing symbol “20”. Meanwhile, it goes without saying that the cloud server (20) can also be replaced with the term edge server (22) of edge computing.
나아가, “클라우드 서버”의 용어는 클라우드 로봇 시스템, 클라우드 시스템, 클라우드 로봇 제어 시스템, 클라우드 제어 시스템 등의 용어로 다양하게 변경될 수 있다.Furthermore, the term “cloud server” can be variously changed to terms such as cloud robot system, cloud system, cloud robot control system, and cloud control system.
한편, 본 발명에 따른 클라우드 서버(20)는 건물(1000)을 주행하는 복수의 로봇에 대한 통합 제어를 수행하는 것이 가능하다. 즉, 클라우드 서버(20)는 건물(1000)내 위치한 i)복수의 로봇(R)에 대한 모니터링을 수행하고, ii)복수의 로봇에 대해 임무(또는 업무)를 할당하며, iii)복수의 로봇(R)이 임무를 성공적으로 수행하도록 건물(1000)내 구비된 설비 인프라를 직접적으로 제어하거나, iv)설비 인프라를 제어하는 제어 시스템과 통신을 통하여 설비 인프라가 제어되도록 할 수 있다.Meanwhile, the cloud server (20) according to the present invention can perform integrated control for a plurality of robots running in a building (1000). That is, the cloud server (20) can i) monitor a plurality of robots (R) located in the building (1000), ii) assign tasks (or work) to the plurality of robots, iii) directly control the facility infrastructure provided in the building (1000) so that the plurality of robots (R) successfully perform the tasks, or iv) control the facility infrastructure through communication with a control system that controls the facility infrastructure.
나아가, 클라우드 서버(20)는 건물에 위치한 로봇들의 상태 정보를 확인하고, 로봇들에 필요한 다양한 기능을 제공(또는 지원)할 수 있다. 여기에서, 다양한 기능은, 로봇들에 대한 충전 기능, 오염된 로봇에 대한 세척 기능, 임무가 완료된 로봇들에 대한 대기 기능 등이 존재할 수 있다.In addition, the cloud server (20) can check the status information of robots located in the building and provide (or support) various functions required for the robots. Here, various functions may exist, such as a charging function for robots, a cleaning function for contaminated robots, and a standby function for robots whose tasks have been completed.
클라우드 서버(20)는 로봇들에 대해 다양한 기능을 제공하기 위하여, 로봇들이 건물(1000)에 구비된 다양한 설비 인프라를 이용하도록, 로봇들을 제어할 수 있다. 나아가, 클라우드 서버는, 로봇들에 대해 다양한 기능을 제공하기 위하여, 건물(1000)내 구비된 설비 인프라를 직접적으로 제어하거나, 설비 인프라를 제어하는 제어 시스템과 통신을 통하여 설비 인프라가 제어되도록 할 수 있다.The cloud server (20) can control the robots so that the robots can use various facility infrastructures equipped in the building (1000) to provide various functions to the robots. Furthermore, the cloud server can directly control the facility infrastructure equipped in the building (1000) or control the facility infrastructure through communication with a control system that controls the facility infrastructure to provide various functions to the robots.
이와 같이, 클라우드 서버(20)에 의해 제어되는 로봇들은 건물(1000)을 주행하며, 다양한 서비스를 제공할 수 있다.In this way, robots controlled by the cloud server (20) can move around the building (1000) and provide various services.
한편, 클라우드 서버(20)는 데이터베이스에 저장된 정보를 근거로, 다양한 제어를 수행할 수 있으며, 본 발명에서 데이터베이스의 종류 및 위치에는 특별한 한정을 두지 않는다. 이러한 데이터베이스의 용어는 메모리, 저장부, 저장소, 클라우드 저장소, 외부 저장소, 외부 서버 등, 정보가 저장되는 수단을 의미하는 용어이면 자유롭게 변형되어 사용되어질 수 있다. 이하에서는 “데이터베이스”의 용어로 통일하여 설명하도록 한다.Meanwhile, the cloud server (20) can perform various controls based on the information stored in the database, and there is no particular limitation on the type and location of the database in the present invention. The term of the database can be freely modified and used as long as it means a means for storing information, such as memory, storage, storage, cloud storage, external storage, external server, etc. In the following, the term “database” will be used for explanation.
한편, 본 발명에 따른 클라우드 서버(20)는 로봇들이 제공하는 서비스의 종류, 로봇에 대한 제어의 종류 등 다양한 기준에 근거하여 로봇에 대한 분산 제어를 수행할 수 있으며, 이 경우, 클라우드 서버(20)에는 하위 개념의 종속적인 서브 서버들이 존재할 수 있다.Meanwhile, the cloud server (20) according to the present invention can perform distributed control of robots based on various criteria such as the type of service provided by the robots, the type of control for the robots, etc., and in this case, the cloud server (20) can have sub-servers of lower concept.
나아가, 본 발명에 따른 클라우드 서버(20)는 다양한 인공지능 알고리즘에 근거하여, 건물(1000)을 주행하는 로봇을 제어할 수 있다.Furthermore, the cloud server (20) according to the present invention can control a robot moving through a building (1000) based on various artificial intelligence algorithms.
나아가, 클라우드 서버(20)는 로봇을 제어하는 과정에서 수집되는 데이터들을 학습 데이터로서 활용하는 인공지능 기반의 학습을 수행하고, 이를 로봇의 제어에 활용함으로써, 로봇에 대한 제어가 이루어질수록 로봇을 보다 정확하고, 효율적으로 운용할 수 있다. 즉, 클라우드 서버(20)는 딥러닝 또는 머신 러닝을 수행하도록 이루어질 수 있다. 또한, 클라우드 서버(20)는 시뮬레이션 등을 통하여 딥러닝 또는 머신 러닝을 수행하고, 그 결과로서 구축된 인공지능 모델을 이용하여 로봇에 대한 제어를 수행할 수 있다.Furthermore, the cloud server (20) performs artificial intelligence-based learning that utilizes data collected in the process of controlling the robot as learning data, and utilizes this to control the robot, so that the more control is performed on the robot, the more accurately and efficiently the robot can be operated. That is, the cloud server (20) can be configured to perform deep learning or machine learning. In addition, the cloud server (20) can perform deep learning or machine learning through simulation, etc., and perform control on the robot using the artificial intelligence model constructed as a result.
한편, 건물(1000)에는 로봇의 주행, 로봇의 기능 제공, 로봇의 기능 유지, 로봇의 임무 수행 또는 로봇과 사람의 공존을 위하여 다양한 설비 인프라가 구비될 수 있다. Meanwhile, the building (1000) may be equipped with various facility infrastructures for robot driving, robot function provision, robot function maintenance, robot mission performance, or coexistence of robots and humans.
예를 들어, 도 1의 (a)에 도시된 것과 같이, 건물(1000) 내에는 로봇(R)의 주행(또는 이동)을 지원할 수 있는 다양한 설비 인프라(1, 2)가 구비될 수 있다. 이러한 설비 인프라(1, 2)는 건물(1000)의 층 내에서 로봇(R)의 수평 방향으로의 이동을 지원하거나, 건물(1000)의 서로 다른 층 사이를 로봇(R)이 이동하도록 수직 방향으로의 이동을 지원할 수 있다. 이와 같이, 상기 설비 인프라(1, 2)는 로봇의 이동을 지원하는 운송체계를 구비할 수 있다. 클라우드 서버(20)는 이러한 다양한 설비 인프라(1, 2)를 이용하도록 로봇(R)을 제어하여, 도 1의 (b)에 도시된 것과 같이, 로봇(R)이 서비스를 제공하기 위하여 건물(1000) 내를 이동하도록 할 수 있다.For example, as illustrated in (a) of FIG. 1, various facility infrastructures (1, 2) capable of supporting the driving (or movement) of the robot (R) may be provided within the building (1000). These facility infrastructures (1, 2) may support horizontal movement of the robot (R) within a floor of the building (1000) or vertical movement of the robot (R) between different floors of the building (1000). In this way, the facility infrastructures (1, 2) may be provided with a transportation system that supports the movement of the robot. The cloud server (20) may control the robot (R) to utilize these various facility infrastructures (1, 2) so that the robot (R) may move within the building (1000) to provide a service, as illustrated in (b) of FIG. 1.
한편, 본 발명에 따른 로봇들은 클라우드 서버(20) 및 로봇 자체에 구비된 제어부 중 적어도 하나에 근거하여 제어되어, 건물(1000) 내를 주행하거나, 부여된 임무에 해당하는 서비스를 제공하도록 이루어질 수 있다.Meanwhile, robots according to the present invention can be controlled based on at least one of a cloud server (20) and a control unit provided in the robot itself to drive within a building (1000) or provide a service corresponding to an assigned task.
나아가, 도 1의 (c)에 도시된 것과 같이, 본 발명에 따른 건물은 로봇과 사람들이 공존하는 건물로서, 로봇들은 사람(U), 사람이 사용하는 물건(예를 들어 유모차, 카트 등), 동물과 같은 장애물을 피하여 주행하도록 이루어지며, 경우에 따라 로봇의 주행과 관련된 알림 정보(3)를 출력하도록 이루어질 수 있다. 이러한 로봇의 주행은 클라우드 서버(20) 및 로봇에 구비된 제어부 중 적어도 하나의 근거 하에 장애물을 피하도록 이루어질 수 있다. 클라우드 서버(20)는 로봇에 구비된 다양한 센서(예를 들어, 카메라(이미지 센서), 근접 센서, 적외선 센서 등)를 통해 수신되는 정보에 근거하여, 로봇이 장애물을 피하여 건물(1000) 내를 이동하도록 로봇에 대한 제어를 수행할 수 있다.Furthermore, as illustrated in (c) of FIG. 1, a building according to the present invention is a building where robots and people coexist, and the robots are configured to avoid obstacles such as people (U), objects used by people (e.g., baby strollers, carts, etc.), and animals while driving, and in some cases, may be configured to output notification information (3) related to the driving of the robot. Such driving of the robot may be configured to avoid obstacles based on at least one of a cloud server (20) and a control unit equipped in the robot. The cloud server (20) may control the robot so that the robot moves within the building (1000) while avoiding obstacles based on information received through various sensors equipped in the robot (e.g., a camera (image sensor), a proximity sensor, an infrared sensor, etc.).
또한, 도 1의 (a) 내지 (c)의 과정을 거쳐 건물 내를 주행하는 로봇은, 도 1의 (d)에 도시된 것과 같이, 건물 내에 존재하는 사람 또는 타겟 객체에게 서비스를 제공하도록 이루어질 수 있다. In addition, a robot that moves inside a building through the processes of (a) to (c) of FIG. 1 can be configured to provide a service to a person or target object existing inside the building, as shown in (d) of FIG. 1.
로봇이 제공하는 서비스의 종류는, 로봇 마다 상이할 수 있다. 즉, 로봇은 용도에 따라 다양한 종류가 존재할 수 있으며, 로봇은 용도 마다 상이한 구조를 가지고, 로봇에는 용도에 적합한 프로그램이 탑재될 수 있다.The types of services provided by robots may vary from robot to robot. In other words, robots may exist in various types depending on their purpose, robots may have different structures depending on their purpose, and robots may be equipped with programs appropriate for their purpose.
예를 들어, 건물(1000)에는 배송, 물류 작업, 안내, 통역, 주차지원, 보안, 방범, 경비, 치안, 청소, 방역, 소독, 세탁, 푸드(food) 제조, 음식 제조, 서빙, 화재 진압, 의료 지원 및 엔터테인먼트 서비스 중 적어도 하나의 서비스를 제공하는 로봇들이 배치될 수 있다. 로봇들이 제공하는 서비스는 위에서 열거된 예들 외에도 다양할 수 있다.For example, a building (1000) may be equipped with robots that provide at least one of the following services: delivery, logistics, guidance, interpretation, parking assistance, security, crime prevention, guarding, public safety, cleaning, quarantine, disinfection, laundry, food preparation, food preparation, serving, fire suppression, medical assistance, and entertainment. The services provided by the robots may vary in addition to the examples listed above.
한편, 클라우드 서버(20)는 로봇들 각각의 용도를 고려하여, 로봇들에게 적절한 임무를 할당하고, 할당된 임무가 수행되도록 로봇들에 대한 제어를 수행할 수 있다.Meanwhile, the cloud server (20) can assign appropriate tasks to the robots by considering the purpose of each robot and control the robots so that the assigned tasks are performed.
본 발명에서 설명되는 로봇들 중 적어도 일부는 클라우드 서버(20)의 제어 하에 주행하거나, 임무를 수행할 수 있으며, 이 경우, 로봇 자체에서 주행 또는 임무를 수행하기 위하여 처리되는 데이터의 양은 최소화될 수 있다. 본 발명에서는 이러한 로봇을 브레인리스(brainless) 로봇이라고 명명할 수 있다. 이러한 브레인리스 로봇은, 건물(1000) 내에서 주행, 임무 수행, 충전 수행, 대기, 세척 등의 행위를 하는데 있어서, 적어도 일부의 제어를 클라우드 서버(20)의 제어에 의존할 수 있다.At least some of the robots described in the present invention can drive or perform tasks under the control of a cloud server (20), and in this case, the amount of data processed by the robot itself for driving or performing tasks can be minimized. In the present invention, such a robot can be called a brainless robot. Such a brainless robot can depend on the control of the cloud server (20) for at least part of the control when performing actions such as driving, performing tasks, charging, waiting, and cleaning within a building (1000).
다만, 본 명세서에서는 브레인리스 로봇을 구분하여 명명하지 않고, 모두 “로봇”으로 통일하여 명명하도록 한다.However, in this specification, brainless robots are not named separately, but are all referred to as “robots.”
앞서 설명한 것과 같이, 본 발명에 따른 건물(1000)은 로봇이 이용 가능한 다양한 설비 인프라가 구비될 수 있으며, 도 2, 도 3 및 도 4에 도시된 것과 같이, 설비 인프라는 건물(1000)내에 배치되어, 건물(1000) 및 클라우드 서버(20)와의 연동을 통해, 로봇의 이동(또는 주행)을 지원하거나, 로봇에게 다양한 기능을 제공할 수 있다.As described above, the building (1000) according to the present invention can be equipped with various facility infrastructures that can be used by the robot, and as illustrated in FIGS. 2, 3, and 4, the facility infrastructures are placed within the building (1000) and, through linkage with the building (1000) and a cloud server (20), can support movement (or driving) of the robot or provide various functions to the robot.
보다 구체적으로, 설비 인프라는 건물 내에서 로봇의 이동을 지원하기 위한 설비들을 포함할 수 있다.More specifically, the facility infrastructure may include facilities to support the movement of the robot within the building.
로봇의 이동을 지원하는 설비들은, 로봇이 전용으로 사용하는 로봇 전용 설비 및 사람과 공동으로 사용하는 공용 설비 중 어느 하나의 타입을 가질 수 있다.The facilities that support the movement of the robot can have either a robot-only facility for exclusive use by the robot or a shared facility for joint use with people.
나아가, 로봇의 이동을 지원하는 설비들은 로봇의 수평 방향으로의 이동을 지원하거나, 로봇의 수직 방향으로의 이동을 지원할 수 있다. 로봇들은 건물(1000)내에서 설비들을 이용하여, 수평 또는 수직 방향으로 이동할 수 있다. 수평 방향으로의 이동은, 동일 층 내에서의 이동을 의미하며, 수직 방향으로의 이동은 서로 다른 층간 사이를 이동하는 것을 의미할 수 있다. 따라서 본 발명에서는 동일 층 내에서 상하로 이동하는 것은 수평 방향의 이동으로 지칭할 수 있다.Furthermore, the facilities supporting the movement of the robot can support the horizontal movement of the robot or the vertical movement of the robot. The robots can move horizontally or vertically using the facilities within the building (1000). Movement in the horizontal direction means movement within the same floor, and movement in the vertical direction can mean movement between different floors. Therefore, in the present invention, moving up and down within the same floor can be referred to as movement in the horizontal direction.
로봇의 이동을 지원하는 설비들은 다양할 수 있으며, 예를 들어, 도 2 및 도 3에 도시된 것과 같이, 건물(1000)에는 로봇의 수평 방향으로의 이동을 지원하는 로봇 통로(로봇 도로, 201, 202, 203)가 구비될 수 있다. 이러한 로봇 통로는, 로봇이 전용으로 이용하는 로봇 전용 통로를 포함할 수 있다. 한편, 로봇 전용 통로는 사람의 접근이 원천적으로 차단되도록 이루어지는 것이 가능하나, 반드시 이에 한정되지 않을 수 있다. 즉, 로봇 전용 통로는 사람이 통행하거나, 접근할 수 있는 구조로 이루어질 수 있다.The facilities supporting the movement of the robot may be diverse, and for example, as shown in FIGS. 2 and 3, a building (1000) may be provided with a robot passage (robot road, 201, 202, 203) supporting the horizontal movement of the robot. This robot passage may include a robot-only passage exclusively used by the robot. Meanwhile, the robot-only passage may be formed so that access by humans is fundamentally blocked, but may not necessarily be limited thereto. That is, the robot-only passage may be formed in a structure that allows humans to pass through or access it.
한편, 도 3에 도시된 것과 같이, 로봇 전용 통로는 제1 전용 통로(또는 제1 타입 통로, 201) 및 제2 전용 통로(또는 제2 타입 통로, 202) 중 적어도 하나로 이루어질 수 있다. 제1 전용 통로 및 제2 전용 통로(201, 202)는 동일 층에 함께 구비되거나, 서로 다른 층에 구비될 수 있다.Meanwhile, as illustrated in FIG. 3, the robot-only passage may be formed of at least one of a first-only passage (or a first-type passage, 201) and a second-only passage (or a second-type passage, 202). The first-only passage and the second-only passage (201, 202) may be provided together on the same floor or on different floors.
또 다른 예로서, 도 2 및 도 3에 도시된 것과 같이, 건물(1000)에는 로봇의 수직 방향으로의 이동을 지원하는 이동 수단(204, 205)이 구비될 수 있다. 이러한 이동 수단(204, 205)은 엘리베이터(elevator) 또는 에스컬레이터(escalator) 중 적어도 하나를 포함할 수 있다. 로봇은 건물(1000)에 구비된 엘리베이터(204) 또는 에스컬레이터(205)를 이용하여, 서로 다른 층 사이를 이동할 수 있다.As another example, as illustrated in FIGS. 2 and 3, the building (1000) may be equipped with a moving means (204, 205) that supports vertical movement of the robot. The moving means (204, 205) may include at least one of an elevator or an escalator. The robot may move between different floors using the elevator (204) or the escalator (205) equipped in the building (1000).
한편, 이러한 엘리베이터(204) 또는 에스컬레이터(205)는 로봇 전용으로 이루어지거나, 사람과 함께 이용하는 공용으로 이루어질 수 있다.Meanwhile, these elevators (204) or escalators (205) may be for robot use only or may be for shared use with people.
예를 들어, 건물(1000)에는 로봇 전용 엘리베이터 또는 공용 엘리베이터 중 적어도 하나가 포함될 수 있다. 마찬가지로, 나아가, 건물(1000)에는 로봇 전용 에스컬레이터 또는 공용 에스컬레이터 중 적어도 하나가 포함될 수 있다. For example, the building (1000) may include at least one of a robot-only elevator or a public elevator. Likewise, further, the building (1000) may include at least one of a robot-only escalator or a public escalator.
한편, 건물(1000)은 수직 방향 이동과 수평 방향 이동에 모두 활용될 수 있는 형태의 이동 수단이 구비될 수 있다. 예를 들어, 무빙워크(moving walkway) 형태의 이동 수단이 로봇에게 층 내에서 수평 방향 이동을 지원하거나, 층 간에서 수직 방향 이동을 지원할 수 있다.Meanwhile, the building (1000) may be equipped with a means of movement that can be utilized for both vertical and horizontal movement. For example, a means of movement in the form of a moving walkway may support horizontal movement of the robot within a floor or vertical movement between floors.
로봇은 자체적인 제어 또는 클라우드 서버(20)에 의한 제어 하에, 수평 방향 또는 수직 방향으로 건물(1000) 내를 이동할 수 있으며, 이때, 로봇의 이동을 지원하는 다양한 설비를 이용하여, 건물(1000) 내를 이동할 수 있다.The robot can move within the building (1000) in a horizontal or vertical direction under its own control or under the control of a cloud server (20), and at this time, the robot can move within the building (1000) using various facilities that support the movement of the robot.
나아가, 건물(1000)에는 건물(1000) 또는 건물(1000)내 특정 영역으로의 출입을 제어하는 출입문(206, 또는 자동문) 및 출입 통제 게이트(gate, 207) 중 적어도 하나를 포함할 수 있다. 출입문(206) 및 출입 통제 게이트(207) 중 적어도 하나는 로봇이 이용 가능하도록 이루어질 수 있다. 로봇은 클라우드 서버(20)의 제어 하에 출입문(또는 자동문, 206) 또는 출입 통제 게이트(207)를 통과하도록 이루어질 수 있다.Furthermore, the building (1000) may include at least one of an entrance door (206, or automatic door) and an access control gate (gate, 207) that control access to the building (1000) or a specific area within the building (1000). At least one of the entrance door (206) and the access control gate (207) may be configured to be accessible to a robot. The robot may be configured to pass through the entrance door (or automatic door, 206) or the access control gate (207) under the control of the cloud server (20).
한편, 출입 통제 게이트(207)는 다양하게 명명될 수 있으며, 스피드 게이트(speed gate)등으로 명명될 수 있다.Meanwhile, the access control gate (207) may be named in various ways, such as a speed gate.
나아가, 건물(1000)에는, 로봇이 대기하는 대기 공간에 해당하는 대기 공간 설비(208), 로봇의 충전을 위한 충전 설비(209), 로봇의 세척을 위한 세척 설비(210)가 더 포함될 수 있다.In addition, the building (1000) may further include a waiting space facility (208) corresponding to a waiting space where the robot waits, a charging facility (209) for charging the robot, and a cleaning facility (210) for cleaning the robot.
나아가, 건물(1000)에는 로봇이 제공하는 특정 서비스에 특화된 설비(211)가 포함될 수 있으며, 예를 들어 배송 서비스를 위한 설비가 포함될 수 있다.Furthermore, the building (1000) may include facilities (211) specialized for specific services provided by the robot, for example facilities for delivery services.
또한, 건물(1000)에는 로봇을 모니터링하기 위한 설비가 포함될 수 있으며(도면부호 212 참조), 이러한 설비의 예로는 다양한 센서들(예를 들어, 카메라(또는 이미지 센서, 121)가 존재할 수 있다.Additionally, the building (1000) may include equipment for monitoring the robot (see drawing symbol 212), examples of which may include various sensors (e.g., cameras (or image sensors, 121).
도 2 및 도 3과 함께 살펴본 것과 같이, 본 발명에 따른 건물(1000)에는 서비스 제공, 로봇의 이동, 주행, 기능 유지, 청결 유지 등을 위한 다양한 설비들이 구비될 수 있다.As seen with reference to FIGS. 2 and 3, the building (1000) according to the present invention may be equipped with various facilities for providing services, moving the robot, driving, maintaining functions, maintaining cleanliness, etc.
한편, 도 4에 도시된 것과 같이, 본 발명에 따른 건물(1000)은 클라우드 서버(20), 로봇(R), 설비 인프라(200)와 상호 연결되어, 건물(1000) 내에서 로봇들이 다양한 서비스를 제공함은 물론, 이를 위하여 설비들을 적절하게 이용하도록 할 수 있다.Meanwhile, as illustrated in FIG. 4, a building (1000) according to the present invention is interconnected with a cloud server (20), a robot (R), and equipment infrastructure (200), so that the robots can provide various services within the building (1000) and use the equipment appropriately for this purpose.
여기에서, “상호 연결”된다고 함은, 건물 내에서 제공되는 서비스, 로봇의 이동, 주행, 기능 유지, 청결 유지 등과 관련된 다양한 데이터, 제어명령이 네트워크(또는 통신망)을 통하여 적어도 하나의 주체에서 다른 적어도 하나의 주체로 단방향 또는 쌍방향으로 송수신되는 것을 의미할 수 있다.Here, “interconnected” may mean that various data and control commands related to services provided within a building, movement, driving, function maintenance, and cleaning of the robot, etc. are transmitted and received unidirectionally or bidirectionally from at least one entity to at least one other entity through a network (or communication network).
여기에서, 주체는, 건물(1000), 클라우드 서버(20), 로봇(R), 설비 인프라(200) 등이 될 수 있다.Here, the subject can be a building (1000), a cloud server (20), a robot (R), facility infrastructure (200), etc.
나아가, 설비 인프라(200)는 도 2 및 도 3과 함께 살펴본 다양한 설비들(도면부호 201 내지 213 참조) 각각 및 이들을 제어하는 제어 시스템(201a, 202a, 203a, 204a, …) 중 적어도 하나를 포함할 수 있다.Furthermore, the facility infrastructure (200) may include at least one of the various facilities (see drawing
건물(1000)을 주행하는 로봇(R)은 네트워크(40)를 통하여, 클라우드 서버(20)와 통신하도록 이루어지며, 클라우드 서버(20)와의 제어 하에 건물(1000) 내에서 서비스를 제공할 수 있다.A robot (R) running in a building (1000) is configured to communicate with a cloud server (20) via a network (40) and can provide services within the building (1000) under the control of the cloud server (20).
보다 구체적으로, 건물(1000)은 건물(1000)에 구비된 다양한 설비들과 통신하거나, 설비들을 직접적으로 제어하기 위한 건물 시스템(1000a)을 포함할 수 있다. 도 4에 도시된 것과 같이, 건물 시스템(1000a)은 통신부(110), 센싱부(120), 출력부(130), 저장부(140) 및 제어부(150)를 포함할 수 있다.More specifically, the building (1000) may include a building system (1000a) for communicating with various facilities provided in the building (1000) or directly controlling the facilities. As illustrated in FIG. 4, the building system (1000a) may include a communication unit (110), a sensing unit (120), an output unit (130), a storage unit (140), and a control unit (150).
통신부(110)는 건물(1000) 내에서 유선 통신망 및 무선 통신망 중 적어도 하나를 형성함으로써, i)클라우드 서버(20)와 로봇(R) 사이, ii)클라우드 서버(20)와 건물(1000) 사이, iii)클라우드 서버(20)와 설비 인프라(200) 사이, iv)설비 인프라(200)와 로봇(R) 사이, v)설비 인프라(200)와 건물(1000) 사이를 연결할 수 있다. 즉, 통신부(110)는 서로 다른 주체 간에 통신의 매개체 역할을 수행할 수 있다. 이러한 통신부(110)는 기지국, 공유기 등으로도 명명될 수 있으며, 통신부(110)는 건물(1000) 내에서, 로봇(R), 클라우드 서버(20), 설비 인프라(200)가 상호 통신할 수 있도록 통신망 또는 네트워크를 형성할 수 있다.The communication unit (110) forms at least one of a wired communication network and a wireless communication network within the building (1000), thereby connecting i) between the cloud server (20) and the robot (R), ii) between the cloud server (20) and the building (1000), iii) between the cloud server (20) and the facility infrastructure (200), iv) between the facility infrastructure (200) and the robot (R), and v) between the facility infrastructure (200) and the building (1000). That is, the communication unit (110) can act as a medium for communication between different entities. This communication unit (110) can also be referred to as a base station, a router, etc., and the communication unit (110) can form a communication network or network so that the robot (R), the cloud server (20), and the facility infrastructure (200) can communicate with each other within the building (1000).
한편, 본 명세서에서, 건물(1000)과 통신망을 통해 연결된다고 함은, 건물 시스템(1000a)에 포함된 구성요소 중 적어도 하나와 연결됨을 의미할 수 있다.Meanwhile, in this specification, being connected to a building (1000) via a communication network may mean being connected to at least one of the components included in the building system (1000a).
도 5에 도시된 것과 같이, 건물(1000)에 배치되는 복수의 로봇들(R)은 통신부(110)를 통해 형성되는 유선 통신망 및 무선 통신망 중 적어도 하나를 통하여, 클라우드 서버(20)와 통신을 수행함으로써, 클라우드 서버(20)에 의해 원격 제어되도록 이루어질 수 있다. 이러한 유선 통신망 또는 무선 통신망과 같은 통신망은 네트워크(40)라고 이해되어질 수 있다.As illustrated in FIG. 5, a plurality of robots (R) placed in a building (1000) can be remotely controlled by a cloud server (20) by performing communication with the cloud server (20) through at least one of a wired communication network and a wireless communication network formed through a communication unit (110). Such a communication network, such as a wired communication network or a wireless communication network, can be understood as a network (40).
이와 같이, 건물(1000), 클라우드 서버(20), 로봇(R) 및 설비 인프라(200)는 건물(1000)내에 형성되는 통신망에 근거하여 네트워크(40)를 형성할 수 있다. 로봇(R)은 이러한 네트워크에 기반하여, 클라우드 서버(20)의 제어 하에 건물(1000)내에 구비된 다양한 설비를 이용하여, 할당된 임무에 해당하는 서비스를 제공할 수 있다.In this way, the building (1000), the cloud server (20), the robot (R), and the equipment infrastructure (200) can form a network (40) based on the communication network formed within the building (1000). Based on this network, the robot (R) can provide a service corresponding to an assigned task by utilizing various equipment provided within the building (1000) under the control of the cloud server (20).
한편, 설비 인프라(200)는 도 2 및 도 3과 함께 살펴본 다양한 설비들(도면부호 201 내지 213 참조) 각각 및 이들을 제어하는 제어 시스템(201a, 202a, 203a, 204a, …) 중 적어도 하나를 포함할 수 있다(이러한 제어 시스템은 “제어 서버”로도 명명될 수 있다).Meanwhile, the facility infrastructure (200) may include at least one of the various facilities (see drawing
도 4에 도시된 것과 같이, 서로 다른 종류의 설비들은 고유의 제어 시스템을 구비할 수 있다. 예를 들어, 로봇 통로(또는 로봇 전용 통로, 로봇 도로, 로봇 전용 도로, 201, 202, 203)의 경우, 로봇 통로(201, 202, 203)를 각각 독립적으로 제어하기 위한 제어 시스템(201a, 202a, 203a)이 존재하고, 엘리베이터(또는 로봇 전용 엘리베이터, 204)의 경우, 엘리베이터(204)를 제어하기 위한 제어 시스템(204)이 존재할 수 있다.As illustrated in FIG. 4, different types of equipment may have their own control systems. For example, in the case of a robot passageway (or a robot-only passageway, a robot road, a robot-only road, 201, 202, 203), there may be a control system (201a, 202a, 203a) for independently controlling each of the robot passageways (201, 202, 203), and in the case of an elevator (or a robot-only elevator, 204), there may be a control system (204) for controlling the elevator (204).
이러한, 설비들을 제어하기 위한 고유의 제어 시스템들은 클라우드 서버(20), 로봇(R), 건물(1000) 중 적어도 하나와 통신하여, 로봇(R)이 설비를 이용하도록 각각의 설비에 대한 적절한 제어를 수행할 수 있다.These unique control systems for controlling the facilities can communicate with at least one of the cloud server (20), the robot (R), and the building (1000) to perform appropriate control of each facility so that the robot (R) can use the facility.
한편, 각각의 설비 제어 시스템(201a, 202a, 203a, 204a, …)에 포함된 센싱부(201b, 202b, 203b, 204b, …)는, 설비 자체에 구비되어, 설비와 관련된 다양한 정보를 센싱하도록 이루어질 수 있다. Meanwhile, the sensing units (201b, 202b, 203b, 204b, ...) included in each facility control system (201a, 202a, 203a, 204a, ...) may be provided in the facility itself and configured to sense various information related to the facility.
나아가, 각각의 설비 제어 시스템(201a, 202a, 203a, 204a, …)에 포함된 제어부(201c, 202c, 203c, 204c, …)는 각각의 설비의 구동을 위한 제어를 수행하며, 클라우드 서버(20)와의 통신을 통하여, 로봇(R)이 설비를 이용하도록 적절한 제어를 수행할 수 있다. 예를 들어, 엘리베이터(204)의 제어 시스템(204b)은, 클라우드 서버(20)와의 통신을 통해, 로봇(R)이 엘리베이터(204)에 탑승하도록 로봇(R)이 위치한 층에, 엘리베이터(204)가 정차하도록 엘리베이터(204)를 제어할 수 있다.Furthermore, the control unit (201c, 202c, 203c, 204c, ...) included in each facility control system (201a, 202a, 203a, 204a, ...) performs control for driving each facility, and can perform appropriate control so that the robot (R) can use the facility through communication with the cloud server (20). For example, the control system (204b) of the elevator (204) can control the elevator (204) to stop at the floor where the robot (R) is located so that the robot (R) can board the elevator (204) through communication with the cloud server (20).
각각의 설비 제어 시스템(201a, 202a, 203a, 204a, …)에 포함된 제어부(201c, 202c, 203c, 204c, …) 중 적어도 일부는 각각의 설비(201, 202, 203, 204, …)와 함께 건물(1000)내에 위치하거나, 건물(1000)의 외부에 위치할 수 있다.At least some of the control units (201c, 202c, 203c, 204c, ...) included in each facility control system (201a, 202a, 203a, 204a, ...) may be located within the building (1000) together with each facility (201, 202, 203, 204, ...) or may be located outside the building (1000).
나아가, 본 발명에 따른 건물(1000)에 포함된 설비들 중 적어도 일부는, 클라우드 서버(20)에 의해 제어되거나, 건물(1000)의 제어부(150)에 의하여 제어되는 것 또한 가능하다. 이 경우, 설비는 별도의 설비 제어 시스템을 구비하지 않을 수 있다.Furthermore, at least some of the facilities included in the building (1000) according to the present invention may be controlled by a cloud server (20) or by a control unit (150) of the building (1000). In this case, the facilities may not be equipped with a separate facility control system.
이하의 설명에서는 각각의 설비가 고유의 제어 시스템을 구비하는 것을 예를 들어 설명하도록 하나, 위에서 언급한 것과 같이, 설비를 제어하기 위한 제어 시스템의 역할은 클라우드 서버(20) 또는 건물(1000)의 제어부(150)에 의해 대체될 수 있음은 물론이다. 이 경우, 본 명세서에서 설명되는 설비 제어 시스템의 제어부(201c, 202c, 203c, 204c, …)의 용어는, 클라우드 서버(20) 또는 제어부(150, 또는 건물의 제어부(150))의 용어로 대체되어 표현될 수 있음은 물론이다.In the following description, each facility is provided with an example of having its own control system. However, as mentioned above, it goes without saying that the role of the control system for controlling the facility can be replaced by the control unit (150) of the cloud server (20) or the building (1000). In this case, it goes without saying that the term of the control unit (201c, 202c, 203c, 204c, ...) of the facility control system described in this specification can be replaced with the term of the cloud server (20) or the control unit (150, or the control unit (150) of the building.
한편, 도 4에서 각각의 설비 제어 시스템(201a, 202a, 203a, 204a, …)의 구성요소들은 일 예에 대한 것으로서, 각각의 설비 특성에 따라 다양한 구성요소들이 추가되거나, 제외될 수 있다.Meanwhile, the components of each facility control system (201a, 202a, 203a, 204a, …) in FIG. 4 are for example only, and various components may be added or excluded depending on the characteristics of each facility.
이와 같이, 본 발명에서는 로봇(R), 클라우드 서버(20) 및 설비 제어 시스템(201a, 202a, 203a, 204a, …)이 설비 인프라를 이용하여 건물(1000) 내에서 다양한 서비스를 제공한다. In this way, in the present invention, a robot (R), a cloud server (20), and a facility control system (201a, 202a, 203a, 204a, …) provide various services within a building (1000) by utilizing the facility infrastructure.
이 경우에, 로봇(R)은 주로 건물 내를 주행하여 다양한 서비스를 제공하게 된다. 이를 위하여, 로봇(R)은 바디부, 구동부, 센싱부, 통신부, 인터페이스부 및 전원공급부 중 적어도 하나를 구비할 수 있다.In this case, the robot (R) mainly drives inside the building to provide various services. To this end, the robot (R) may be equipped with at least one of a body part, a driving part, a sensing part, a communication part, an interface part, and a power supply part.
바디부는 외관을 이루는 케이스(케이싱, 하우징, 커버 등)를 포함한다. 본 실시예에서, 케이스는 복수의 파트로 구분될 수 있으며, 케이스에 의하여 형성된 공간에는 각종 전자부품들이 내장된다. 이 경우에, 바디부는 본 발명에서 예시하는 다양한 서비스에 따라 서로 다른 형태로 이루어질 수 있다. 예를 들어, 배송 서비스를 제공하는 로봇의 경우에, 바디부의 상부에 물건을 보관하는 수용함이 구비될 수 있다. 다른 예로서, 청소 서비스를 제공하는 로봇의 경우에 바디부의 하부에 진공을 이용하여 먼지를 흡입하는 흡입구가 구비될 수 있다.The body part includes a case (casing, housing, cover, etc.) forming the exterior. In the present embodiment, the case can be divided into a plurality of parts, and various electronic components are built into the space formed by the case. In this case, the body part can be formed in different shapes according to various services exemplified in the present invention. For example, in the case of a robot providing a delivery service, a storage compartment for storing items can be provided on the upper part of the body part. As another example, in the case of a robot providing a cleaning service, a suction port for sucking dust using a vacuum can be provided on the lower part of the body part.
구동부는 클라우드 서버(20)에서 전송하는 제어 명령에 따른 특정 동작을 수행하도록 이루어진다. The driving unit is configured to perform specific operations according to control commands transmitted from the cloud server (20).
구동부는 주행과 관련하여 로봇의 바디부가 특정 공간 내를 이동할 수 있는 수단을 제공한다. 보다 구체적으로, 구동부는 모터 및 복수의 바퀴를 포함하며, 이들이 조합되어, 로봇(R)을 주행, 방향 전환, 회전시키는 기능을 수행한다. 다른 예로서, 구동부는 주행 외의 다른 동작, 예를 들어 픽업 등의 수행을 위하여 엔드 이펙터, 매니퓰레이터, 액추에이터 중 적어도 하나를 구비할 수 있다. The drive unit provides a means for the body of the robot to move within a specific space in relation to driving. More specifically, the drive unit includes a motor and a plurality of wheels, which are combined to perform the functions of driving, changing direction, and rotating the robot (R). As another example, the drive unit may include at least one of an end effector, a manipulator, and an actuator to perform other operations than driving, such as picking up.
센싱부는 로봇 내 정보(특히, 로봇의 구동상태), 로봇을 둘러싼 주변 환경 정보, 로봇의 위치 정보 및 사용자 정보 중 적어도 하나를 센싱하기 위한 하나 이상의 센서를 포함할 수 있다.The sensing unit may include one or more sensors for sensing at least one of information within the robot (particularly, the operating status of the robot), information about the surrounding environment surrounding the robot, location information of the robot, and user information.
예를 들어, 센싱부는 카메라(이미지 센서), 근접 센서, 적외선 센서, 레이저 스캐너(라이다 센서), RGBD 센서, 지자기 센서, 초음파 센서, 관성 센서, UWB 센서 등을 구비할 수 있다.For example, the sensing unit may be equipped with a camera (image sensor), proximity sensor, infrared sensor, laser scanner (lidar sensor), RGBD sensor, geomagnetic sensor, ultrasonic sensor, inertial sensor, UWB sensor, etc.
로봇의 통신부는 로봇(R)과 건물의 통신부 사이, 로봇(R)과 다른 로봇의 사이, 또는 로봇(R)과 설비의 제어 시스템의 사이에서 무선 통신을 수행하기 위하여, 로봇에서 무선 신호를 송수신하도록 이루어진다. 이러한 예로서, 통신부는 무선 인터넷 모듈, 근거리 통신 모듈, 위치정보 모듈 등을 구비할 수 있다.The communication unit of the robot is configured to transmit and receive wireless signals in the robot in order to perform wireless communication between the robot (R) and the communication unit of the building, between the robot (R) and another robot, or between the robot (R) and the control system of the facility. As examples of this, the communication unit may be equipped with a wireless Internet module, a short-distance communication module, a location information module, etc.
인터페이스부는 로봇(R)을 외부기기와 연결시킬 수 있는 통로로서 구비될 수 있다. 예를 들어, 상기 인터페이스부는 단자(충전단자, 접속단자, 전원단자), 포트 또는 커넥터 등이 될 수 있다. 전원공급부는 외부의 전원, 내부의 전원을 인가받아 로봇(R)에 포함된 각 구성요소들에 전원을 공급하는 장치가 될 수 있다. 다른 예로서, 전원공급부는 로봇(R)의 내부에서 전기에너지를 생성하여 각 구성요소에 공급하는 장치가 될 수 있다.The interface unit may be provided as a passage that can connect the robot (R) to an external device. For example, the interface unit may be a terminal (charging terminal, connection terminal, power terminal), a port, or a connector. The power supply unit may be a device that receives external power or internal power and supplies power to each component included in the robot (R). As another example, the power supply unit may be a device that generates electric energy inside the robot (R) and supplies it to each component.
이상에서, 로봇(R)은 주로 건물 내를 주행하는 것을 기준으로 설명하였으나, 본 발명은 반드시 이에 한정되는 것은 아니다. 예를 들어, 본 발명의 로봇은 드론 등과 같이 건물 내를 비행하는 로봇의 형태도 가능하다. 보다 구체적으로, 안내 서비스를 제공하는 로봇이 건물 내에서 사람의 주변을 비행하면서 사람에게 건물에 대한 안내를 제공할 수 있다. In the above, the robot (R) was mainly described as driving inside a building, but the present invention is not necessarily limited to this. For example, the robot of the present invention can also be in the form of a robot that flies inside a building, such as a drone. More specifically, a robot that provides guidance services can fly around a person inside a building and provide guidance to the person about the building.
한편, 본 발명의 로봇의 전반적인 동작은 클라우드 서버(20)에 의하여 제어된다. 이에 더하여, 로봇은 클라우드 서버(20)의 하위 제어기로서, 제어부를 별도로 구비할 수 있다. 예를 들어, 로봇의 제어부는 클라우드 서버(20)로부터 주행에 대한 제어 명령을 수신하여 로봇의 구동부를 제어한다. 이 경우에, 제어부는 로봇의 센싱부에서 센싱한 데이터를 이용하여, 모터에 인가할 토크 또는 전류를 계산할 수 있다. 계산된 결과를 이용하여 위치 제어기, 속도 제어기, 전류 제어기 등에 의하여 모터 등을 구동하게 되며, 이를 통하여 클라우드 서버(20)의 제어명령을 로봇이 수행하게 된다.Meanwhile, the overall operation of the robot of the present invention is controlled by the cloud server (20). In addition, the robot may be equipped with a separate control unit as a sub-controller of the cloud server (20). For example, the control unit of the robot receives a control command for driving from the cloud server (20) and controls the driving unit of the robot. In this case, the control unit may calculate the torque or current to be applied to the motor using data sensed by the sensing unit of the robot. The motor, etc. is driven by a position controller, a speed controller, a current controller, etc. using the calculated result, and through this, the robot executes the control command of the cloud server (20).
한편, 본 발명에서 건물(1000)은 건물(1000)에 구비된 다양한 설비들과 통신하거나, 설비들을 직접적으로 제어하기 위한 건물 시스템(1000a)을 포함할 수 있다. 도 4 및 도 5에 도시된 것과 같이, 건물 시스템(1000a)은 통신부(110), 센싱부(120), 출력부(130), 저장부(140) 및 제어부(150) 중 적어도 하나를 포함할 수 있다.Meanwhile, in the present invention, the building (1000) may include a building system (1000a) for communicating with various facilities provided in the building (1000) or directly controlling the facilities. As illustrated in FIGS. 4 and 5, the building system (1000a) may include at least one of a communication unit (110), a sensing unit (120), an output unit (130), a storage unit (140), and a control unit (150).
통신부(110)는 건물(1000) 내에서 유선 통신망 및 무선 통신망 중 적어도 하나를 형성함으로써, i)클라우드 서버(20)와 로봇(R) 사이, ii)클라우드 서버(20)와 건물(1000) 사이, iii)클라우드 서버(20)와 설비 인프라(200) 사이, iv)설비 인프라(200)와 로봇(R) 사이, v)설비 인프라(200)와 건물(1000) 사이를 연결할 수 있다. 즉, 통신부(110)는 서로 다른 주체 간에 통신의 매개체 역할을 수행할 수 있다. The communication unit (110) forms at least one of a wired communication network and a wireless communication network within the building (1000), thereby connecting i) between the cloud server (20) and the robot (R), ii) between the cloud server (20) and the building (1000), iii) between the cloud server (20) and the facility infrastructure (200), iv) between the facility infrastructure (200) and the robot (R), and v) between the facility infrastructure (200) and the building (1000). That is, the communication unit (110) can act as a medium for communication between different entities.
도 5 및 도 6에 도시된 것과 같이, 통신부(110)는 이동통신 모듈(111), 유선 인터넷 모듈(112), 무선 인터넷 모듈(113) 및 근거리 통신 모듈(114) 중 적어도 하나를 포함하도록 이루어질 수 있다.As illustrated in FIGS. 5 and 6, the communication unit (110) may be configured to include at least one of a mobile communication module (111), a wired Internet module (112), a wireless Internet module (113), and a short-range communication module (114).
통신부(110)는 위에서 열거된 통신 모듈들에 근거하여, 다양한 통신 방식을 지원할 수 있다.The communication unit (110) can support various communication methods based on the communication modules listed above.
예를 들어, 이동 통신 모듈(111)은, 이동 통신(Mobile Communications)을 위한 기술표준들 또는 통신방식(예를 들어, 5G, 4G, GSM(Global System for Mobile communication), CDMA(Code Division Multi Access), CDMA2000(Code Division Multi Access 2000), EV-DO(Enhanced Voice-Data Optimized or Enhanced Voice-Data Only), WCDMA(Wideband CDMA), HSDPA(High Speed Downlink Packet Access), HSUPA(High Speed Uplink Packet Access), LTE(Long Term Evolution), LTE-A(Long Term Evolution-Advanced) 등)에 따라 구축된 이동 통신망 상에서 건물 시스템(1000a), 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나와 무선 신호를 송수신하도록 이루어질 수 있다. 이 때에, 보다 구체적인 예로서, 로봇(R)은 전술한 로봇(R)의 통신부를 이용하여 이동 통신 모듈(111)과 무선 신호를 송수신할 수 있다.For example, the mobile communication module (111) may be configured to transmit and receive wireless signals with at least one of a building system (1000a), a cloud server (20), a robot (R), and facility infrastructure (200) on a mobile communication network constructed according to technical standards or communication methods for mobile communications (e.g., 5G, 4G, GSM (Global System for Mobile communication), CDMA (Code Division Multi Access), CDMA2000 (Code Division Multi Access 2000), EV-DO (Enhanced Voice-Data Optimized or Enhanced Voice-Data Only), WCDMA (Wideband CDMA), HSDPA (High Speed Downlink Packet Access), HSUPA (High Speed Uplink Packet Access), LTE (Long Term Evolution), LTE-A (Long Term Evolution-Advanced), etc.). At this time, as a more specific example, the robot (R) can transmit and receive wireless signals with the mobile communication module (111) using the communication unit of the robot (R) described above.
다음으로, 유선 인터넷 모듈(112)은 유선 방식으로 통신을 제공하는 방식으로서, 물리적인 통신선을 매개체로 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나와 신호를 송수신 하도록 이루어질 수 있다.Next, the wired Internet module (112) provides communication in a wired manner, and can be configured to transmit and receive signals with at least one of a cloud server (20), a robot (R), and equipment infrastructure (200) using a physical communication line as a medium.
나아가, 무선 인터넷 모듈(113)은 이동 통신 모듈(111)을 포함하는 개념으로서, 무선 인터넷 접속이 가능한 모듈을 의미할 수 있다. 무선 인터넷 모듈(113)은 건물(1000) 내에 배치되어, 무선 인터넷 기술들에 따른 통신망에서 건물 시스템(1000a), 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나와 무선 신호를 송수신하도록 이루어진다.Furthermore, the wireless Internet module (113) is a concept that includes a mobile communication module (111), and may mean a module capable of wireless Internet access. The wireless Internet module (113) is placed in a building (1000) and is configured to transmit and receive wireless signals with at least one of a building system (1000a), a cloud server (20), a robot (R), and facility infrastructure (200) in a communication network according to wireless Internet technologies.
무선 인터넷 기술은 매우 다양할 수 있으며, 앞서 살펴본 이동 통신 모듈(111)의 통신 기술뿐만 아니라, WLAN(Wireless LAN), Wi-Fi, Wi-Fi Direct, DLNA(Digital Living Network Alliance), WiBro(Wireless Broadband), WiMAX(World Interoperability for Microwave Access) 등이 있다. 나아가, 본 발명에서는, 상기 무선 인터넷 모듈(113)은 상기에서 나열되지 않은 인터넷 기술까지 포함한 범위에서 적어도 하나의 무선 인터넷 기술에 따라 데이터를 송수신하게 된다.Wireless Internet technologies can be very diverse, and in addition to the communication technology of the mobile communication module (111) discussed above, there are WLAN (Wireless LAN), Wi-Fi, Wi-Fi Direct, DLNA (Digital Living Network Alliance), WiBro (Wireless Broadband), WiMAX (World Interoperability for Microwave Access), etc. Furthermore, in the present invention, the wireless Internet module (113) transmits and receives data according to at least one wireless Internet technology, including Internet technologies not listed above.
다음으로 근거리 통신 모듈(114)은 근거리 통신(Short range communication)을 위한 것으로서, 블루투스(Bluetooth™), RFID(Radio Frequency Identification), 적외선 통신(Infrared Data Association; IrDA), UWB(Ultra Wideband), ZigBee, NFC(Near Field Communication), Wi-Fi, Wi-Fi Direct, Wireless USB(Wireless Universal Serial Bus) 기술 중 적어도 하나를 이용하여, 건물 시스템(1000a), 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나와 근거리 통신을 수행할 수 있다.Next, the short-range communication module (114) is for short-range communication, and can perform short-range communication with at least one of the building system (1000a), the cloud server (20), the robot (R), and the facility infrastructure (200) by using at least one of Bluetooth™, RFID (Radio Frequency Identification), Infrared Data Association (IrDA), UWB (Ultra Wideband), ZigBee, NFC (Near Field Communication), Wi-Fi, Wi-Fi Direct, and Wireless USB (Wireless Universal Serial Bus) technologies.
통신부(110)는 위에서 살펴본 통신 모듈들 중 적어도 하나를 포함할 수 있으며, 이러한 통신 모듈들은 건물(1000) 내부의 다양한 공간에 배치되어, 통신망을 형성할 수 있다. 이러한 통신망을 통해, i)클라우드 서버(20)와 로봇(R), ii)클라우드 서버(20)와 건물(1000), iii)클라우드 서버(20)와 설비 인프라(200, iv)설비 인프라(200)와 로봇(R), v)설비 인프라(200)와 건물(1000)은 상호 통신하도록 이루어질 수 있다.The communication unit (110) may include at least one of the communication modules discussed above, and these communication modules may be placed in various spaces inside the building (1000) to form a communication network. Through this communication network, i) the cloud server (20) and the robot (R), ii) the cloud server (20) and the building (1000), iii) the cloud server (20) and the facility infrastructure (200, iv) the facility infrastructure (200) and the robot (R), and v) the facility infrastructure (200) and the building (1000) may be configured to communicate with each other.
다음으로, 건물(1000)은 센싱부(120)를 포함할 수 있으며, 이러한 센싱부(120)는 다양한 센서들을 포함하도록 이루어질 수 있다. 건물(1000)의 센싱부(120)를 통해 센싱된 정보 중 적어도 일부는, 통신부(110)를 통해 형성되는 통신망을 통해, 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나로 전송될 수 있다. 클라우드 서버(20), 로봇(R) 및 설비 인프라(200) 중 적어도 하나는, 센싱부(120)를 통해 센싱된 정보를 이용하여, 로봇(R)을 제어하거나 설비 인프라(200)를 제어할 수 있다.Next, the building (1000) may include a sensing unit (120), and the sensing unit (120) may be configured to include various sensors. At least some of the information sensed through the sensing unit (120) of the building (1000) may be transmitted to at least one of the cloud server (20), the robot (R), and the facility infrastructure (200) through a communication network formed through the communication unit (110). At least one of the cloud server (20), the robot (R), and the facility infrastructure (200) may control the robot (R) or the facility infrastructure (200) using the information sensed through the sensing unit (120).
센싱부(120)에 포함된 센서들의 종류는 매우 다양할 수 있다. 센싱부(120)는 건물(1000)에 구비되어, 건물(1000)에 대한 다양한 정보들을 센싱하도록 이루어질 수 있다. 센싱부(120)에 의해 센싱되는 정보는, 건물(1000)을 주행하는 로봇(R), 건물(1000)에 위치한 사람, 장애물, 등에 대한 정보일 수 있으며, 건물과 관련된 다양한 환경 정보(예를 들어, 온도, 습도 등)를 포함할 수 있다.The types of sensors included in the sensing unit (120) may be very diverse. The sensing unit (120) may be installed in the building (1000) and configured to sense various pieces of information about the building (1000). The information sensed by the sensing unit (120) may be information about a robot (R) running in the building (1000), a person located in the building (1000), an obstacle, etc., and may include various environmental information related to the building (e.g., temperature, humidity, etc.).
도 5에 도시된 것과 같이, 센싱부(120)는 이미지 센서(121), 마이크(122), 바이오 센서(123), 근접센서(124), 조도센서(125), 적외선 센서(126), 온도 센서(127) 및 습도 센서(128) 중 적어도 하나를 포함할 수 있다.As illustrated in FIG. 5, the sensing unit (120) may include at least one of an image sensor (121), a microphone (122), a biosensor (123), a proximity sensor (124), an illuminance sensor (125), an infrared sensor (126), a temperature sensor (127), and a humidity sensor (128).
여기에서, 이미지 센서(121)는 카메라에 해당할 수 있다. 도 3에서 살펴본 것과 같이, 건물(1000)에는 이미지 센서(121)에 해당하는 카메라가 배치될 수 있다. 본 명세서에서는 카메라에 대하여 이미지 센서(121)와 동일한 도면 부호 “121”를 부여하기로 한다. Here, the image sensor (121) may correspond to a camera. As seen in FIG. 3, a camera corresponding to the image sensor (121) may be placed in the building (1000). In this specification, the camera is given the same drawing symbol “121” as the image sensor (121).
한편, 건물(1000)에 배치되는 카메라(121)의 수는 그 제한이 없다. 건물(1000)에 배치된 카메라(121)의 종류는 다양할 수 있으며, 일 예로서, 건물(1000)에 배치된 카메라(121)는 CCTV(closed circuit television)일 수 있다. 한편, 카메라(121)가 건물(1000)에 배치되었다 함은, 건물(1000)의 실내 공간(10)에 카메라(121)가 배치됨을 의미할 수 있다.Meanwhile, there is no limitation on the number of cameras (121) placed in the building (1000). The types of cameras (121) placed in the building (1000) may vary, and as an example, the camera (121) placed in the building (1000) may be a CCTV (closed circuit television). Meanwhile, the fact that the camera (121) is placed in the building (1000) may mean that the camera (121) is placed in the indoor space (10) of the building (1000).
다음으로, 마이크(122)는 건물(1000)에서 발생하는 다양한 소리 정보를 센싱하도록 이루어질 수 있다. Next, the microphone (122) can be configured to sense various sound information occurring in the building (1000).
바이오 센서(123)는 생체 정보를 센싱하기 위한 것으로서, 건물(1000)에 위치한 사람 또는 동물에 대한 생체 정보(예를 들어, 지문 정보, 얼굴 정보, 홍채 정보 등)를 센싱할 수 있다.The biosensor (123) is for sensing biometric information and can sense biometric information (e.g., fingerprint information, facial information, iris information, etc.) about a person or animal located in a building (1000).
근접 센서(124)는 근접 센서(124)에 대해 접근하거나 근접 센서(124) 주변에 위치한 대상(로봇 또는 사람 등)을 센싱하도록 이루어질 수 있다.The proximity sensor (124) can be configured to sense an object (such as a robot or a person) approaching the proximity sensor (124) or located around the proximity sensor (124).
나아가, 조도 센서(125)는 조도 센서(125) 센서 주변의 조도를 센싱하도록 이루어지며, 적외선 센서(126)는 LED가 내장되어 이를 이용해 어두운 실내나 야간에 건물(1000)에 대한 촬영을 수행할 수 있다.In addition, the light sensor (125) is configured to sense the light around the light sensor (125), and the infrared sensor (126) has a built-in LED, which can be used to take pictures of a building (1000) in a dark room or at night.
나아가, 온도 센서(127)는 온도 센서(127) 주변의 온도를 센싱하며, 습도 센서(128)는 습도 센서(128) 주변의 온도를 센싱할 수 있다.Furthermore, the temperature sensor (127) can sense the temperature around the temperature sensor (127), and the humidity sensor (128) can sense the temperature around the humidity sensor (128).
한편, 본 발명에서 센싱부(120)를 구성하는 센서의 종류에는 특별한 제한이 없으며, 각각의 센서에 의해 정의되는 기능이 구현되기만 하면 족하다.Meanwhile, there is no particular limitation on the type of sensor constituting the sensing unit (120) in the present invention, and it is sufficient as long as the function defined by each sensor is implemented.
다음으로, 출력부(130)는 건물(1000)에서 사람 또는 로봇(R)에게, 시각적, 청각적 및 촉각적 정보 중 적어도 하나를 출력하기 위한 수단으로서, 디스플레이부(131), 음향 출력부(132) 및 조명부(133) 중 적어도 하나를 포함할 수 있다. 이러한 출력부(130)는 필요 또는 상황에 따라 건물(1000)의 실내 공간 상에 적절한 위치에 배치될 수 있다.Next, the output unit (130) may include at least one of a display unit (131), an audio output unit (132), and a lighting unit (133) as a means for outputting at least one of visual, auditory, and tactile information to a person or a robot (R) in the building (1000). This output unit (130) may be placed at an appropriate location in the indoor space of the building (1000) depending on necessity or circumstances.
다음으로, 저장부(140)는 건물(1000), 로봇 및 설비 인프라 중 적어도 하나와 관련된 다양한 정보를 저장하도록 이루어질 수 있다. 본 발명에서 저장부(140)는 건물(1000) 자체에 구비될 수 있다. 이와 다르게, 이와 다르게, 저장부(140)의 적어도 일부는, 클라우드 서버(20) 또는 외부 데이터베이스 중 적어도 하나를 의미할 수 있다. 즉, 저장부(140)는 본 발명에 따른 다양한 정보가 저장되는 공간이면 충분하며, 물리적인 공간에 대한 제약은 없는 것으로 이해될 수 있다. Next, the storage (140) may be configured to store various information related to at least one of the building (1000), the robot, and the facility infrastructure. In the present invention, the storage (140) may be provided in the building (1000) itself. Alternatively, at least a part of the storage (140) may mean at least one of a cloud server (20) or an external database. That is, the storage (140) may be sufficient as long as it is a space where various information according to the present invention is stored, and it may be understood that there is no limitation on the physical space.
다음으로 제어부(150)는 건물(1000)에 대한 전반적인 제어를 수행하는 수단으로서, 통신부(110), 센싱부(120), 출력부(130) 및 저장부(140) 중 적어도 하나를 제어할 수 있다. 제어부(150)는 클라우드 서버(20)와 연동하여, 로봇에 대한 제어를 수행할 수 있다. 나아가, 제어부(150)는 클라우드 서버(20)의 형태로 존재할 수 있다. 이 경우, 건물(1000)은 로봇(R)의 제어 수단인 클라우드 서버(20)에 의해 함께 제어될 수 있다, 이와 다르게, 건물(1000)을 제어하는 클라우드 서버는 로봇(R)을 제어하는 클라우드 서버(20)와 별개로 존재할 수 있다. 이 경우, 건물(1000)을 제어하는 클라우드 서버와 로봇(R)을 제어하는 클라우드 서버(20)는 상호 통신을 통하여, 로봇(R)에 의해 서비스 제공되도록 서로 연동하거나, 로봇의 이동, 기능 유지, 청결 유지 등을 위하여 서로 연동될 수 있다. 한편, 건물(1000)의 제어부는 “프로세서(processor)”로도 명명될 수 있으며, 프로세서는 기본적인 산술, 로직 및 입출력 연산을 수행함으로써, 다양한 명령을 처리하도록 구성될 수 있다Next, the control unit (150) is a means for performing overall control of the building (1000) and can control at least one of the communication unit (110), the sensing unit (120), the output unit (130), and the storage unit (140). The control unit (150) can perform control of the robot by linking with the cloud server (20). Furthermore, the control unit (150) can exist in the form of a cloud server (20). In this case, the building (1000) can be controlled together by the cloud server (20), which is a control means of the robot (R). Alternatively, the cloud server controlling the building (1000) can exist separately from the cloud server (20) controlling the robot (R). In this case, the cloud server controlling the building (1000) and the cloud server (20) controlling the robot (R) may be interconnected with each other through mutual communication so that the robot (R) may provide services, or may be interconnected with each other for the movement, function maintenance, and cleanliness maintenance of the robot. Meanwhile, the control unit of the building (1000) may also be named a “processor,” and the processor may be configured to process various commands by performing basic arithmetic, logic, and input/output operations.
이상에서 살펴본 것과 같이, 건물(1000), 로봇(R), 클라우드 서버(20) 및 설비 인프라(200)는 중 적어도 하나는 통신망을 기반으로 네트워크(40)를 형성하여, 건물(1000)내에서 로봇을 이용한 다양한 서비스가 제공되도록 이루어질 수 있다. As described above, at least one of the building (1000), the robot (R), the cloud server (20), and the facility infrastructure (200) forms a network (40) based on a communication network, so that various services using the robot can be provided within the building (1000).
이상에서 살펴본 것과 같이, 본 발명에 따른 건물(1000)에서는, 로봇에 의해 다양한 서비스가 제공되도록, 로봇(R), 건물 내 구비되는 설비 인프라(200) 및 클라우드 서버(20)가 유기적으로 연결될 수 있다. 이러한 로봇(R), 설비 인프라(200) 및 클라우드 서버(20) 중 적어도 일부는 로봇 친화형 건물을 구축하기 위한 플랫폼 형태로 존재할 수 있다.As described above, in a building (1000) according to the present invention, a robot (R), facility infrastructure (200) provided within the building, and a cloud server (20) can be organically connected so that various services can be provided by the robot. At least some of the robot (R), facility infrastructure (200), and cloud server (20) can exist in the form of a platform for constructing a robot-friendly building.
이하에서는, 위에서 살펴본 건물(1000), 건물 시스템(1000a), 설비 인프라(200), 클라우드 서버(20)의 내용을 참고하여, 로봇(R)이 설비 인프라(200)를 이용하는 과정에 대하여 보다 구체적으로 살펴본다. 이때, 로봇(R)은, 임무 수행(또는 서비스 제공), 주행, 충전, 청결 유지, 대기 등의 목적으로, 건물(1000)의 실내 공간(10)을 주행거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다.Hereinafter, with reference to the contents of the building (1000), building system (1000a), facility infrastructure (200), and cloud server (20) discussed above, the process in which the robot (R) utilizes the facility infrastructure (200) will be examined in more detail. At this time, the robot (R) may drive in the indoor space (10) of the building (1000) or move using the facility infrastructure (200) for the purpose of performing a task (or providing a service), driving, charging, maintaining cleanliness, waiting, etc., and may further utilize the facility infrastructure (200).
이와 같이, 로봇(R)은 어떠한 “목적”에 근거하여, “목적”을 달성하기 위하여, 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다.In this way, the robot (R) can drive within the indoor space of the building (1000) or move using the facility infrastructure (200) to achieve the “purpose” based on a certain “purpose”, and further, can utilize the facility infrastructure (200).
이때, 로봇이 달성해야할 목적은 다양한 원인에 근거하여 특정될 수 있다. 로봇이 달성해야 할 목적은, 제1 타입의 목적과 제2 타입의 목적이 존재할 수 있다.At this time, the purpose that the robot must achieve can be specified based on various causes. The purpose that the robot must achieve can exist as a first type purpose and a second type purpose.
여기에서, 제1 타입의 목적은 로봇이 로봇 본연의 임무를 수행하기 위한 것이고, 제2 타입의 목적은 로봇이 로봇 본연의 임무 외의 임무 또는 기능을 수행하기 위한 것일 수 있다.Here, the first type of purpose may be for the robot to perform its original mission, and the second type of purpose may be for the robot to perform a mission or function other than its original mission.
즉, 제1 타입에 따른 로봇이 달성해야하는 목적은, 로봇 본연의 임무를 수행하기 위한 목적일 수 있다. 이러한 목적은, 로봇의 “임무(task)”라고도 이해되어질 수 있다.That is, the purpose that a robot of the first type must achieve may be the purpose of performing the robot's original mission. This purpose may also be understood as the robot's "task."
예를 들어, 로봇이 서빙 서비스를 제공하는 로봇인 경우, 로봇은 서빙 서비스를 제공하기 위한 목적 또는 임무을 달성하기 위하여, 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다. 또한, 로봇이 길 안내 서비스를 제공하는 로봇인 경우, 로봇은 길 안내 서비스를 제공하기 위한 목적 또는 임무을 달성하기 위하여, 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다.For example, if the robot is a robot that provides a serving service, the robot may drive in an indoor space of a building (1000) or move using the facility infrastructure (200) and further utilize the facility infrastructure (200) in order to achieve the purpose or mission of providing the serving service. In addition, if the robot is a robot that provides a route guidance service, the robot may drive in an indoor space of a building (1000) or move using the facility infrastructure (200) and further utilize the facility infrastructure (200) in order to achieve the purpose or mission of providing the route guidance service.
한편, 본 발명에 따른 건물에는 서로 다른 목적에 따른 운용되는 복수의 로봇이 위치할 수 있다. 즉, 건물에는 서로 다른 임무를 수행가능한 서로 다른 로봇들이 배치될 수 있으며, 이는 건물의 관리자, 건물에 입주한 다양한 주체들의 필요에 의하여, 건물에는 서로 다른 종류의 로봇들이 배치될 수 있다.Meanwhile, a plurality of robots operating for different purposes may be positioned in the building according to the present invention. That is, different robots capable of performing different tasks may be placed in the building, and different types of robots may be placed in the building according to the needs of the building manager and various entities occupying the building.
예를 들어, 건물에는 배송, 물류 작업, 안내, 통역, 주차지원, 보안, 방범, 경비, 치안, 청소, 방역, 소독, 세탁, 푸드(food) 제조, 음식 제조, 서빙, 화재 진압, 의료 지원 및 엔터테인먼트 서비스 중 적어도 하나의 서비스를 제공하는 로봇들이 배치될 수 있다. 로봇들이 제공하는 서비스는 위에서 열거된 예들 외에도 다양할 수 있다.For example, a building may be equipped with robots that provide at least one of the following services: delivery, logistics, guidance, interpretation, parking assistance, security, crime prevention, guarding, public safety, cleaning, quarantine, disinfection, laundry, food preparation, food preparation, serving, fire suppression, medical assistance, and entertainment services. The services provided by the robots may vary in addition to the examples listed above.
한편, 제2 타입의 목적은 로봇이 로봇 본연의 임무 외의 임무 또는 기능을 수행하기 위한 것으로서, 이는, 로봇 본연의 임무와 관련 없는 목적일 수 있다. 이러한 제2 타입의 목적은, 로봇이 로봇 본연의 임무를 수행하는 것과 직접적으로 연관되지는 않으나, 간접적으로 필요한 임무 또는 기능일 수 있다.Meanwhile, the second type of purpose is for the robot to perform a task or function other than the robot's original task, which may be a purpose unrelated to the robot's original task. This second type of purpose may be a task or function that is not directly related to the robot performing the robot's original task, but is indirectly necessary.
예를 들어, 로봇이 본연의 임무 수행을 위해서는, 동작에 필요한 충분한 전원이 필요하고, 로봇이 사람들에게 쾌적한 서비스를 제공하기 위해서는 청결을 유지해야 한다. 나아가, 복수의 로봇이 건물 내에서 효율적으로 운용되기 위해서는, 때로는 일정한 공간에서 대기하는 상황이 존재할 수 있다.For example, in order for a robot to perform its original mission, it needs sufficient power for its operation, and in order for the robot to provide pleasant services to people, it needs to be kept clean. Furthermore, in order for multiple robots to operate efficiently within a building, there may be times when they have to wait in a certain space.
이와 같이, 본 발명에서 로봇은 제2 타입의 목적을 달성하기 위하여, 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다.In this way, in order to achieve the second type of purpose, the robot in the present invention can drive in an indoor space of a building (1000) or move using the facility infrastructure (200), and further, can utilize the facility infrastructure (200).
예를 들어, 로봇은 충전 기능에 따른 목적을 달성하기 위하여, 충전 설비 인프라를 이용할 수 있고, 세척 기능에 따른 목적을 달성하기 위하여 세척 설비 인프라를 이용할 수 있다.For example, a robot may utilize charging facility infrastructure to achieve a purpose according to a charging function, and may utilize washing facility infrastructure to achieve a purpose according to a washing function.
이와 같이, 본 발명에서 로봇은 어떠한 목적을 달성하기 위하여, 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용할 수 있다.In this way, in the present invention, the robot can drive in an indoor space of a building (1000) or move using the facility infrastructure (200) to achieve a certain purpose, and further, can utilize the facility infrastructure (200).
한편, 클라우드 서버(20)는 데이터베이스(database) 상에 저장된 건물에 위치한 복수의 로봇들 각각에 대응되는 정보에 근거하여, 건물 내 위치한 로봇들 각각에 대한 적절한 제어를 수행할 수 있다.Meanwhile, the cloud server (20) can perform appropriate control on each robot located within the building based on information corresponding to each of the multiple robots located within the building stored in the database.
한편, 데이터베이스 상에는 건물 내 위치한 복수의 로봇 각각에 대한 다양한 정보가 저장될 수 있으며, 로봇(R)에 대한 정보는 매우 다양할 수 있다. 일 예로서, i)공간(10)에 배치된 로봇(R)을 식별하기 위한 식별 정보(예를 들어, 일련번호, TAG 정보, QR코드 정보 등), ii)로봇(R)에 부여된 임무 정보(예를 들어, 임무의 종류, 임무에 따른 동작, 임무의 대상이 되는 타겟 유저 정보, 임무 수행 장소, 임무 수행 예정 시간 등), iii)로봇(R)에 설정된 주행 경로 정보, iv)로봇(R)의 위치 정보, v)로봇(R)의 상태 정보(예를 들어, 전원 상태, 고장 유무, 세척 상태, 배터리 상태 등), vi)로봇(R)에 구비된 카메라로부터 수신된 영상 정보, vii) 로봇(R)의 동작과 관련된 동작 정보 등이 존재할 수 있다.Meanwhile, various information about each of a plurality of robots located in a building may be stored in the database, and information about the robot (R) may be very diverse. For example, there may be i) identification information for identifying the robot (R) placed in the space (10) (e.g., serial number, TAG information, QR code information, etc.), ii) mission information assigned to the robot (R) (e.g., type of mission, operation according to the mission, target user information that is the subject of the mission, mission performance location, mission performance scheduled time, etc.), iii) driving path information set for the robot (R), iv) location information of the robot (R), v) status information of the robot (R) (e.g., power status, breakdown, cleaning status, battery status, etc.), vi) image information received from a camera equipped in the robot (R), vii) operation information related to the operation of the robot (R), etc.
한편, 로봇들에 대한 적절한 제어는, 앞서 살펴본 제1 타입의 목적 또는 제2 타입의 목적에 따라 로봇을 운용하는 제어와 관련된 것일 수 있다.Meanwhile, appropriate control of robots may be related to the control of operating robots according to the purpose of the first type or the purpose of the second type discussed above.
여기에서, 로봇의 운용은 로봇이 건물(1000)의 실내 공간을 주행하거나, 설비 인프라(200)를 이용하여 이동하고, 나아가, 설비 인프라(200)를 이용하도록 하는 제어를 의미할 수 있다.Here, operation of the robot may mean control to enable the robot to drive within the indoor space of the building (1000), move using the facility infrastructure (200), and further, utilize the facility infrastructure (200).
로봇의 이동은 로봇의 주행으로 지칭될 수 있으며, 따라서 본 발명에서 이동 경로와 주행 경로는 혼용되어 사용될 수 있다.The movement of the robot may be referred to as the driving of the robot, and therefore, in the present invention, the movement path and the driving path may be used interchangeably.
클라우드 서버(20)는 데이터베이스에 저장된 로봇 각각에 대한 정보에 근거하여, 로봇들 각각의 용도(또는 본연의 임무)에 따라 로봇들에게 적절한 임무를 할당하고, 할당된 임무가 수행되도록 로봇들에 대한 제어를 수행할 수 있다. 이때 할당되는 임무는 앞서 살펴본 제1 타입의 목적을 달성하기 위한 임무일 수 있다.The cloud server (20) can assign appropriate tasks to the robots based on the information about each robot stored in the database according to the purpose (or original mission) of each robot, and control the robots so that the assigned tasks are performed. At this time, the assigned tasks may be tasks for achieving the first type of purpose discussed above.
나아가, 클라우드 서버(20)는 데이터베이스에 저장된 로봇 각각에 대한 정보에 근거하여, 로봇들 각각에 제2 타입의 목적을 달성하기 위한 제어를 수행할 수 있다.Furthermore, the cloud server (20) can perform control on each robot to achieve a second type of purpose based on information about each robot stored in the database.
이때, 클라우드 서버(20)로부터 제2 타입의 목적을 달성하기 위한 제어명령을 수신한 로봇은, 제어 명령에 근거하여, 충전 설비 인프라로 이동하거나, 세척 설비 인프라 등으로 이동하여, 제2 타입의 목적을 달성할 수 있다.At this time, the robot that has received a control command to achieve the second type of purpose from the cloud server (20) can move to the charging facility infrastructure or the washing facility infrastructure, etc., based on the control command, to achieve the second type of purpose.
한편, 이하에서는, 제1 타입 또는 제2 타입의 목적을 구분하지 않고, “목적” 또는 “임무”의 용어를 사용하도록 한다. 이하에서 설명되는 목적은, 제1 타입의 목적 또는 제2 타입의 목적 중 어느 하나일 수 있다. Meanwhile, in the following, the terms “purpose” or “mission” will be used without distinguishing between the first type or the second type of purpose. The purpose described below may be either the first type of purpose or the second type of purpose.
마찬가지로, 이하에서 설명되는 임무 역시, 제1 타입의 목적을 달성하기 위한 임무 또는 제2 타입의 목적을 달성하기 위한 임무일 수 있다.Likewise, the mission described below may be a mission to achieve the first type of objective or a mission to achieve the second type of objective.
예를 들어, 서빙 서비스 제공이 가능한 로봇이 존재하고, 서빙할 대상(타겟 유저(target user))이 존재하는 경우, 클라우드 서버(20)는 로봇이 타겟 유저에게 서빙에 대응하는 임무를 수행하도록, 로봇에 대한 제어를 수행할 수 있다.For example, if there is a robot capable of providing serving services and there is a target user to serve, the cloud server (20) can control the robot so that the robot performs a task corresponding to serving the target user.
또 다른 예를 들어, 충전이 필요한 로봇이 존재하는 경우, 클라우드 서버(20)는 로봇이 충전에 해당하는 임무를 수행하도록, 충전 설비 인프라로 로봇이 이동하도록 하는 제어를 수행할 수 있다.For another example, if there is a robot that needs to be charged, the cloud server (20) can perform control to move the robot to the charging facility infrastructure so that the robot performs a task corresponding to charging.
이에, 이하에서는, 제1 타입의 목적 또는 제2 타입의 목적에 대한 구분 없이, 클라우드 서버(20)의 제어 하에, 로봇이 설비 인프라(200)를 이용하여 목적 또는 임무을 수행하는 방법에 대하여 보다 구체적으로 살펴본다. 한편, 본 명세서에서 클라우드 서버(20)는 임무를 수행하기 위하여 클라우드 서버(20)에 의해 제어 되는 로봇은 “타겟 로봇”으로 명명되는 것 또한 가능하다.Hereinafter, a method in which a robot performs a purpose or task by using the facility infrastructure (200) under the control of a cloud server (20), regardless of whether the purpose is a first type or a second type, will be examined in more detail. Meanwhile, in this specification, a robot controlled by a cloud server (20) to perform a task may also be referred to as a “target robot.”
클라우드서 서버(20)는 요청 또는 자체적인 판단하에, 임무를 수행할 적어도 하나의 로봇을 특정할 수 있다.The cloud server (20) can, upon request or at its own discretion, specify at least one robot to perform a task.
여기에서, 요청은 다양한 주체로부터 수신되는 것이 가능하다. 예를 들어, 클라우드 서버는 건물에 위치한 방문객, 관리자, 입주민, 근로자 등과 같은 다양한 주체로부터 다양한 방식(예를 들어, 전자기기를 통한 사용자 입력, 제스처 방식의 사용자 입력)으로 요청을 수신할 수 있다. 여기에서, 요청은 로봇에 의해 특정 서비스(또는 특정 임무)가 제공되도록 하는 서비스 요청일 수 있다.Here, the request can be received from various subjects. For example, the cloud server can receive requests in various ways (e.g., user input via electronic devices, user input via gestures) from various subjects such as visitors, managers, residents, and workers located in the building. Here, the request can be a service request for a specific service (or a specific task) to be provided by the robot.
클라우드 서버(20)는 이러한 요청에 기반하여, 건물(1000)내 위치한 복수의 로봇 중 해당 서비스를 수행 가능한 로봇을 특정할 수 있다. 클라우드 서버(20)는 i)로봇이 수행 가능한 서비스 종류, ii)로봇이 기 할당받은 임무, iii)로봇의 현재 위치, iv)로봇의 상태(ex: 전원 상태, 청결 상태, 배터리 상태 등)에 근거하여, 상기 요청에 대응 가능한 로봇을 특정할 수 있다. 앞서 살펴본 것과 같이, 데이터베이스 상에는 로봇 각각에 대한 다양한 정보 존재하며, 클라우드 서버(20)는 이러한 데이터베이스에 근거하여, 상기 요청에 기반하여 임무를 수행할 로봇을 특정할 수 있다.Based on the request, the cloud server (20) can specify a robot among multiple robots located within the building (1000) that can perform the service. The cloud server (20) can specify a robot that can respond to the request based on i) the type of service that the robot can perform, ii) the task assigned to the robot, iii) the current location of the robot, and iv) the status of the robot (e.g., power status, cleanliness status, battery status, etc.). As described above, there is various information about each robot in the database, and the cloud server (20) can specify a robot that will perform the task based on the request based on the database.
나아가, 클라우드 서버(20)는 자체적인 판단에 근거하여, 임무를 수행할 적어도 하나의 로봇을 특정할 수 있다.Furthermore, the cloud server (20) can, based on its own judgment, specify at least one robot to perform the task.
여기에서, 클라우드 서버(20)는 다양한 원인에 근거하여 자체적인 판단을 수행할 수 있다. Here, the cloud server (20) can perform its own judgment based on various causes.
일 예로서, 클라우드 서버(20)는, 건물(1000)내에 존재하는 특정 사용자 또는 특정 공간에 서비스의 제공이 필요한지를 판단할 수 있다. 클라우드 서버(20)는 건물(1000)에 존재하는 센싱부(120, 도 4 내지 도 6 참조), 설비 인프라(200)에 포함된 센싱부 및 로봇에 구비된 센싱부 중 적어도 하나로부터 센싱 및 수신된 정보에 기반하여, 서비스의 제공이 필요한 특정 대상을 추출할 수 있다.As an example, the cloud server (20) can determine whether a specific user or a specific space within a building (1000) requires provision of a service. The cloud server (20) can extract a specific target requiring provision of a service based on information sensed and received from at least one of a sensing unit (120, see FIGS. 4 to 6) within the building (1000), a sensing unit included in the facility infrastructure (200), and a sensing unit equipped in a robot.
여기에서, 특정 대상은, 사람, 공간 또는 객체 중 적어도 하나를 포함할 수 있다. 객체는, 건물(1000)내 위치하는 시설물, 물체 등을 의미할 수 있다. 그리고, 클라우드 서버(20)는 추출된 특정 대상에게 필요한 서비스의 종류를 특정하고, 특정 대상에게 특정 서비스가 제공되도록 로봇을 제어할 수 있다.Here, a specific target may include at least one of a person, a space, or an object. The object may mean a facility, an object, etc. located within a building (1000). In addition, the cloud server (20) may specify the type of service required for the extracted specific target and control the robot so that the specific service is provided to the specific target.
이를 위하여, 클라우드 서버(20)는 특정 대상에게 특정 서비스를 제공할 적어도 하나의 로봇을 특정할 수 있다. To this end, the cloud server (20) can specify at least one robot that will provide a specific service to a specific target.
클라우드 서버(20)는 다양한 판단 알고리즘에 근거하여, 서비스의 제공이 필요한 대상을 판단할 수 있다. 예를 들어, 클라우드 서버(20)는 건물(1000)에 존재하는 센싱부(120, 도 4 내지 도 6 참조), 설비 인프라(200)에 포함된 센싱부 및 로봇에 구비된 센싱부 중 적어도 하나로부터 센싱 및 수신된 정보에 근거하여, 길 안내, 서빙, 계단 이동 등과 같이 서비스의 종류를 특정할 수 있다. 그리고, 클라우드 서버(20)는 해당 서비스가 필요한 대상을 특정할 수 있다. 나아가, 클라우드 서버(20)는 로봇에 의한 서비스가 제공이 제공되도록, 특정된 서비스의 제공이 가능한 로봇을 특정할 수 있다.The cloud server (20) can determine a target that requires service provision based on various judgment algorithms. For example, the cloud server (20) can specify a type of service, such as route guidance, serving, or stairway movement, based on information sensed and received from at least one of a sensing unit (120, see FIGS. 4 to 6) existing in a building (1000), a sensing unit included in the facility infrastructure (200), and a sensing unit equipped in a robot. In addition, the cloud server (20) can specify a target that requires the service. Furthermore, the cloud server (20) can specify a robot capable of providing a specified service so that the service is provided by the robot.
나아가, 클라우드 서버(20)는 다양한 판단 알고리즘에 근거하여, 서비스의 제공이 필요한 특정 공간을 판단할 수 있다. 예를 들어, 클라우드 서버(20)는 건물(1000)에 존재하는 센싱부(120, 도 4 내지 도 6 참조), 설비 인프라(200)에 포함된 센싱부 및 로봇에 구비된 센싱부 중 적어도 하나로부터 센싱 및 수신된 정보에 근거하여, 배송의 타겟 유저, 안내가 필요한 게스트, 오염된 공간, 오염된 시설물, 화재 구역 등과 같이 서비스의 제공이 필요한 특정 공간 또는 객체를 추출하고, 해당 특정 공간 또는 객체에 로봇에 의한 서비스가 제공되도록, 해당 서비스 제공이 가능한 로봇을 특정할 수 있다.Furthermore, the cloud server (20) can determine a specific space requiring service provision based on various judgment algorithms. For example, the cloud server (20) can extract a specific space or object requiring service provision, such as a target user for delivery, a guest requiring guidance, a contaminated space, a contaminated facility, a fire zone, etc., based on information sensed and received from at least one of a sensing unit (120, see FIGS. 4 to 6) existing in a building (1000), a sensing unit included in the facility infrastructure (200), and a sensing unit equipped in a robot, and can specify a robot capable of providing the service so that the service is provided by the robot to the specific space or object.
이와 같이, 특정 임무(또는 서비스)를 수행할 로봇이 특정되면, 클라우드 서버(20)는 로봇에 임무를 할당하고, 로봇이 임무를 수행하기 위하여 필요한 일련의 제어를 수행할 수 있다.In this way, when a robot to perform a specific task (or service) is specified, the cloud server (20) can assign a task to the robot and perform a series of controls necessary for the robot to perform the task.
이때, 일련의 제어는 i)로봇의 이동 경로 설정, ii)임무가 수행될 목적지까지 이동하는데 이용되어야 할 설비 인프라 특정, iii)특정된 설비 인프라와의 통신, iv)특정된 설비 인프라에 대한 제어, v)임무를 수행하는 로봇 모니터링, vi)로봇의 주행에 대한 평가, vii)로봇의 임무 수행 완료여부 모니터링 중 적어도 하나를 포함할 수 있다.At this time, a series of controls may include at least one of i) setting a movement path of the robot, ii) specifying a facility infrastructure to be used for moving to a destination where the mission is to be performed, iii) communicating with a specific facility infrastructure, iv) controlling a specific facility infrastructure, v) monitoring the robot performing the mission, vi) evaluating the driving of the robot, and vii) monitoring whether the robot has completed the mission.
클라우드 서버(20)는 로봇의 임무가 수행될 목적지를 특정하고, 로봇이 해당 목적지에 도달하기 위한 이동 경로를 설정할 수 있다. 로봇(R)은 클라우드 서버(20)에 의해 이동 경로가 설정되면, 임무의 수행을 위하여, 해당 목적지까지 이동하도록 제어될 수 있다.The cloud server (20) can specify the destination where the robot's mission is to be performed and set a movement path for the robot to reach the destination. When the movement path is set by the cloud server (20), the robot (R) can be controlled to move to the destination in order to perform the mission.
한편, 클라우드 서버(20)는 로봇이 임무 수행을 시작(개시)하는 위치(이하, “임무 수행 시작 위치”로 명명함)부터 목적지까지 도달하기 위한 이동 경로를 설정할 수 있다. 여기에서, 로봇이 임무 수행을 시작하는 위치는 로봇의 현재 위치이거나, 로봇이 임무 수행을 시작하는 시점에서의 로봇의 위치일 수 있다. Meanwhile, the cloud server (20) can set a movement path from the location where the robot starts (initiates) performing a task (hereinafter referred to as “task performance start location”) to reach the destination. Here, the location where the robot starts performing a task can be the current location of the robot or the location of the robot at the time when the robot starts performing the task.
클라우드 서버(20)는, 건물(1000)의 실내 공간(10)에 대응되는 지도(map, 또는 지도 정보))에 근거하여, 임무를 수행할 로봇의 이동 경로를 생성할 수 있다.The cloud server (20) can generate a movement path of a robot to perform a mission based on a map (or map information) corresponding to an indoor space (10) of a building (1000).
여기에서, 지도는, 건물의 실내 공간을 구성하는 복수의 층(10a, 10b, 10c, …) 각각의 공간에 대한 지도 정보를 포함할 수 있다.Here, the map may include map information for each space of multiple floors (10a, 10b, 10c, …) that constitute the interior space of the building.
나아가, 이동 경로는, 임무 수행 시작 위치로부터, 임무가 수행되는 목적지까지의 이동 경로 일 수 있다.Furthermore, the movement path may be a movement path from a mission execution start location to a destination where the mission is performed.
본 발명에서는 이러한 지도 정보와 이동 경로에 대하여, 실내 공간에 대한 것으로 설명하나, 본 발명은 반드시 이에 한정되는 것은 아니다. 예를 들어, 지도 정보는 실외 공간의 정보를 포함할 수 있으며, 이동 경로는 실내 공간에서 실외 공간까지 이어지는 경로가 될 수 있다.In the present invention, the map information and movement path are described as being for indoor spaces, but the present invention is not necessarily limited thereto. For example, the map information may include information on outdoor spaces, and the movement path may be a path connecting an indoor space to an outdoor space.
도 8에 도시된 것과 같이, 건물(1000)의 실내 공간(10)은 서로 다른 복수의 층들(10a, 10b, 10c, 10d, …)로 구성될 수 있으며, 임무 수행 시작 위치와 목적지는 서로 동일한 층에 위치하거나, 서로 다른 층에 위치할 수 있다.As illustrated in FIG. 8, the indoor space (10) of the building (1000) may be composed of a plurality of different floors (10a, 10b, 10c, 10d, ...), and the mission execution start location and destination may be located on the same floor or on different floors.
클라우드 서버(20)는 복수의 층들(10a, 10b, 10c, 10d, …)에 대한 지도 정보를 이용하여, 건물(1000) 내에서 서비스를 수행할 로봇의 이동 경로를 생성할 수 있다.The cloud server (20) can generate a movement path of a robot that performs a service within a building (1000) by using map information for multiple floors (10a, 10b, 10c, 10d, …).
클라우드 서버(20)는 건물(1000)에 배치된 설비 인프라(복수의 설비) 중 로봇이 목적지까지 이동하기 위하여 이용 또는 통과해야 하는 적어도 하나의 설비를 특정할 수 있다. The cloud server (20) can specify at least one facility among the facility infrastructure (multiple facilities) placed in the building (1000) that the robot must use or pass through to move to the destination.
예를 들어, 클라우드 서버(20)는 로봇이 1층(10a)에서 2층(10b)으로 이동해야 하는 경우, 로봇의 층간 이동을 보조할 적어도 하나의 설비(204, 205)를 특정하고, 특정된 설비가 위치한 지점을 포함하여 이동 경로를 생성할 수 있다. 여기에서, 로봇의 층간 이동을 보조하는 설비는 로봇 전용 엘리베이터(204), 공용 엘리베이터(213), 에스컬레이터(205) 중 적어도 하나일 수 있다. 이 밖에도, 로봇의 층간 이동을 보조하는 설비는 다양한 종류가 존재할 수 있다.For example, when a robot needs to move from the first floor (10a) to the second floor (10b), the cloud server (20) can specify at least one facility (204, 205) to assist the robot in moving between floors, and generate a movement path including the point where the specified facility is located. Here, the facility assisting the robot in moving between floors can be at least one of a robot-only elevator (204), a public elevator (213), and an escalator (205). In addition, there can be various types of facilities assisting the robot in moving between floors.
일 예로서, 클라우드 서버(20)는 실내 공간(10)의 복수의 층들(10a, 10b, 10c, …) 중 목적지에 해당하는 특정 층을 확인하고, 로봇의 임무 수행 시작 위치(ex: 서비스에 대응되는 임무를 개시하는 시점에서의 로봇의 위치)를 기준으로, 로봇이 서비스를 수행하기 위하여 층간 이동이 필요한지 판단할 수 있다.As an example, the cloud server (20) can identify a specific floor corresponding to a destination among multiple floors (10a, 10b, 10c, ...) of an indoor space (10), and determine whether the robot needs to move between floors to perform a service based on the robot's task execution start position (ex: the robot's position at the time of starting a task corresponding to the service).
그리고, 클라우드 서버(20)는 판단 결과에 근거하여, 상기 이동 경로 상에 로봇의 층간 이동을 보조하는 설비(수단)를 포함할 수 있다. 이때, 로봇의 층간 이동을 보조하는 설비는 로봇 전용 엘리베이터(204), 공용 엘리베이터(213), 에스컬레이터(205) 중 적어도 하나일 수 있다. 예를 들어, 클라우드 서버(20)는 로봇의 층간 이동이 필요한 경우, 로봇의 층간 이동을 보조하는 설비가 로봇의 이동 경로 상에 포함되도록, 이동 경로를 생성할 수 있다. And, the cloud server (20) may include a facility (means) that assists the movement of the robot between floors on the movement path based on the judgment result. At this time, the facility that assists the movement of the robot between floors may be at least one of a robot-only elevator (204), a public elevator (213), and an escalator (205). For example, when the movement of the robot between floors is required, the cloud server (20) may generate a movement path so that the facility that assists the movement of the robot between floors is included on the movement path of the robot.
또 다른 예를 들어, 클라우드 서버(20)는 로봇의 이동 경로 상에 로봇 전용 통로(201, 202)가 위치하는 경우, 로봇 전용 통로(201, 202)를 이용하여 로봇이 이동하도록, 로봇 전용 통로(201, 202)가 위치한 지점을 포함하여 이동 경로를 생성할 수 있다. 앞서 도 3과 함께 살펴본 것과 같이, 로봇 전용 통로는 제1 전용 통로(또는 제1 타입 통로, 201) 및 제2 전용 통로(또는 제2 타입 통로, 202) 중 적어도 하나로 이루어질 수 있다. 제1 전용 통로 및 제2 전용 통로(201, 202)는 동일 층에 함께 구비되거나, 서로 다른 층에 구비될 수 있다. 제1 전용 통로(201) 및 상기 제2 전용 통로(202)는 건물의 바닥면을 기준으로 서로 다른 높이를 가질 수 있다. As another example, if a robot-only passageway (201, 202) is located on the movement path of the robot, the cloud server (20) can generate a movement path including a point where the robot-only passageway (201, 202) is located so that the robot can move using the robot-only passageway (201, 202). As discussed above with reference to FIG. 3, the robot-only passageway can be formed of at least one of a first-only passageway (or a first-type passageway, 201) and a second-only passageway (or a second-type passageway, 202). The first-only passageway and the second-only passageway (201, 202) can be provided together on the same floor or can be provided on different floors. The first-only passageway (201) and the second-only passageway (202) can have different heights with respect to the floor surface of the building.
한편, 클라우드 서버(20)는 로봇이 이용하는 로봇 전용 통로의 타입 및 로봇 전용 통로 주변의 혼잡도에 근거하여, 로봇 전용 통로 상에서의 로봇의 주행 특성이 달라지도록 제어할 수 있다. 클라우드 서버(20)는 도 3 및 도 8에 도시된 것과 같이, 제2 전용 통로를 로봇이 주행하는 경우, 로봇 전용 통로 주변의 혼잡도에 근거하여, 로봇의 주행 특성이 달라지도록 할 수 있다. 제2 전용 통로는, 사람 또는 동물이 접근 가능한 통로이기 때문에, 안전성 및 이동 효율성을 함께 고려하기 위함이다.Meanwhile, the cloud server (20) can control the driving characteristics of the robot on the robot-only passage to vary based on the type of the robot-only passage used by the robot and the degree of congestion around the robot-only passage. As shown in FIG. 3 and FIG. 8, the cloud server (20) can control the driving characteristics of the robot to vary based on the degree of congestion around the robot-only passage when the robot is driving on the second dedicated passage. Since the second dedicated passage is a passage accessible to people or animals, this is to consider both safety and movement efficiency.
여기에서, 로봇의 주행 특성은, 로봇의 주행 속도와 관련될 수 있다. 나아가, 혼잡도는, 건물(1000)에 배치된 카메라(또는 이미지 센서, 121) 및 로봇에 배치된 카메라 중 적어도 하나로부터 수신되는 영상에 근거하여 산출될 수 있다. 클라우드 서버(20)는 이러한 영상에 근거하여, 로봇이 위치하는 지점 및 진행방향 측의 로봇 전용 통로가 혼잡한 경우, 로봇의 주행 속도를 기 설정된 속도 이하(또는 미만)으로 제어할 수 있다.Here, the driving characteristics of the robot may be related to the driving speed of the robot. Furthermore, the degree of congestion may be calculated based on images received from at least one of a camera (or image sensor, 121) placed in the building (1000) and a camera placed in the robot. Based on these images, the cloud server (20) may control the driving speed of the robot to be lower than (or below) a preset speed when the robot-only passageway at the point where the robot is located and in the direction of travel is congested.
이와 같이, 클라우드 서버(20)는 복수의 층들(10a, 10b, 10c, 10d, …)에 대한 지도 정보를 이용하여, 건물(1000) 내에서 서비스를 수행할 로봇의 이동 경로를 생성하며, 이때, 건물(1000)에 배치된 설비 인프라(복수의 설비) 중 로봇이 목적지까지 이동하기 위하여 이용 또는 통과해야 하는 적어도 하나의 설비를 특정할 수 있다. 그리고, 특정된 적어도 하나의 설비가 이동 경로 상에 포함되도록 하는 이동 경로를 생성할 수 있다. In this way, the cloud server (20) uses map information for multiple floors (10a, 10b, 10c, 10d, ...) to generate a movement path of a robot that will perform a service within a building (1000), and at this time, among the facility infrastructure (multiple facilities) placed in the building (1000), at least one facility that the robot must use or pass through to move to a destination can be specified. In addition, a movement path can be generated so that at least one specified facility is included in the movement path.
한편, 서비스를 수행하기 위하여 실내 공간(10)을 주행하는 로봇은 클라우드 서버(20)로부터 수신되는 이동 경로를 따라 상기 적어도 하나의 설비를 순차적으로 이용 또는 통과하며 목적지까지 주행을 수행할 수 있다.Meanwhile, a robot driving in an indoor space (10) to perform a service can drive to a destination by sequentially using or passing through at least one of the facilities along a movement path received from a cloud server (20).
한편, 로봇이 이용해야 하는 설비의 순서는, 클라우드 서버(20)의 제어 하에 결정될 수 있다. 나아가, 로봇이 이용해야 하는 설비의 순서는, 클라우드 서버(20)로부터 수신되는 이동 경로에 대한 정보에 포함될 수 있다.Meanwhile, the order of the facilities to be used by the robot can be determined under the control of the cloud server (20). Furthermore, the order of the facilities to be used by the robot can be included in the information on the movement path received from the cloud server (20).
한편, 도 7에 도시된 것과 같이, 건물(1000)에는 로봇이 전용하여 사용하는 로봇 전용 설비(201, 202, 204, 208, 209, 211)와 사람과 공동으로 사용하는 공용 설비(205, 206, 207, 213) 중 적어도 하나가 포함될 수 있다.Meanwhile, as illustrated in FIG. 7, the building (1000) may include at least one of robot-only facilities (201, 202, 204, 208, 209, 211) exclusively used by robots and common facilities (205, 206, 207, 213) jointly used by people.
로봇이 전용하여 사용하는 로봇 전용 설비는, 로봇에 필요한 기능(ex: 충전 기능, 세척 기능, 대기 기능)을 제공하는 설비(208. 209)와 로봇의 이동에 이용되는 설비(201, 202, 204, 211)를 포함할 수 있다.Robot-specific equipment used exclusively by the robot may include equipment (208, 209) that provides functions required by the robot (e.g., charging function, washing function, standby function) and equipment (201, 202, 204, 211) used for movement of the robot.
클라우드 서버(20)는, 로봇이 이동 경로를 생성함에 있어, 임무 수행 시작 위치로부터 목적지까지의 경로 상에, 로봇 전용 설비가 존재하는 경우, 로봇이 로봇 전용 설비를 이용하여 이동(또는 통과)하도록 하는 이동 경로를 생성할 수 있따. 즉, 클라우드 서버(20)는 로봇 전용 설비를 우선하여 이동 경로를 생성할 수 있다. 이는 로봇의 이동의 효율성을 높이기 위함이다. 예를 들어, 클라우드 서버(20)는 목적지까지의 이동 경로 상에 로봇 전용 엘리베이터(204)와 공용 엘리베이터(213)가 모두 존재하는 경우, 로봇 전용 엘리베이터(204)가 포함된 이동 경로를 생성할 수 있다.When the cloud server (20) generates a movement path for the robot, if there is a robot-only facility on the path from the task execution start position to the destination, the cloud server (20) can generate a movement path that allows the robot to move (or pass) using the robot-only facility. That is, the cloud server (20) can generate a movement path by giving priority to the robot-only facility. This is to increase the efficiency of the robot's movement. For example, if there is both a robot-only elevator (204) and a public elevator (213) on the movement path to the destination, the cloud server (20) can generate a movement path that includes the robot-only elevator (204).
위에서 살펴본 것과 같이, 본 발명에 따른 건물(1000)을 주행하는 로봇은, 건물(1000)에 구비된 다양한 설비를 이용하여, 임무 수행을 위하여 건물(1000)이 실내 공간을 주행할 수 있다.As described above, a robot that drives a building (1000) according to the present invention can drive within an indoor space of the building (1000) to perform a task by utilizing various facilities provided in the building (1000).
클라우드 서버(20)는 로봇의 원활한 이동을 위하여, 로봇이 이용하는 또는 이용이 예정된 적어도 하나의 설비의 제어 시스템(또는 제어 서버)와 통신하도록 이루어질 수 있다. 앞서, 도 4와 함께 살펴본 것과 같이, 설비들을 제어하기 위한 고유의 제어 시스템들은 클라우드 서버(20), 로봇(R), 건물(1000) 중 적어도 하나와 통신하여, 로봇(R)이 설비를 이용하도록 각각의 설비에 대한 적절한 제어를 수행할 수 있다.The cloud server (20) may be configured to communicate with a control system (or control server) of at least one facility used or scheduled to be used by the robot for smooth movement of the robot. As previously discussed with reference to FIG. 4, unique control systems for controlling the facilities may communicate with at least one of the cloud server (20), the robot (R), and the building (1000) to perform appropriate control of each facility so that the robot (R) may use the facility.
한편, 클라우드 서버(20)는 건물(1000) 내에서 로봇의 위치 정보를 확보해야 하는 니즈가 존재한다. 즉, 클라우드 서버(200은 실시간 또는 기 설정된 시간 간격으로 건물(1000)을 주행하는 로봇의 위치를 모니터링할 수 있다. 클라우드 서버(1000은 건물(1000)을 주행하는 복수의 로봇 모두에 대한 위치 정보를 모니터링하거나, 필요에 따라 선택적으로 특정 로봇에 대해서만 위치 정보를 모니터링할 수 있다. 모니터링 되는 로봇의 위치 정보는 로봇의 정보가 저장된 데이터베이스 상에 저장될 수 있으며, 로봇의 위치 정보는 시간의 흐름에 따라 연속적으로 업데이트될 수 있다. Meanwhile, the cloud server (20) has a need to secure the location information of the robot within the building (1000). That is, the cloud server (200) can monitor the location of the robot running in the building (1000) in real time or at preset time intervals. The cloud server (1000) can monitor the location information of all the robots running in the building (1000), or selectively monitor the location information of only a specific robot as needed. The location information of the monitored robot can be stored in a database where the robot information is stored, and the location information of the robot can be continuously updated over time.
건물(1000)에 위치한 로봇의 위치 정보를 추정하는 방법은 매우 다양할 수 있으며, 이하에서는 로봇의 위치 정보를 추정하는 실시 예에 대하여 살펴보도록 한다.There are many different ways to estimate the location information of a robot located in a building (1000), and below, we will look at an example of estimating the location information of a robot.
도 9 내지 도 11은 본 발명에 따른 로봇 친화형 건물을 주행하는 로봇의 위치를 추정하는 방법을 설명하기 위한 개념도들이다. FIGS. 9 to 11 are conceptual diagrams for explaining a method for estimating the position of a robot moving through a robot-friendly building according to the present invention.
일 예로서, 도 9에 도시된 것과 같이, 본 발명에 따른 클라우드 서버(20)는 로봇(R)에 구비된 카메라(미도시됨)를 이용하여 공간(10)에 대한 영상을 수신하고, 수신된 영상으로부터 로봇의 위치를 추정하는 Visual Localization을 수행하도록 이루어진다. 이때, 카메라는 공간(10)에 대한 영상, 즉, 로봇(R) 주변에 대한 영상을 촬영(또는 센싱)하도록 이루어진다. 이하에서는, 설명의 편의를 위하여, 로봇(R)에 구비된 카메라를 이용하여 획득된 영상을 “로봇 영상”이라고 명명하기로 한다. 그리고, 공간(10)에 배치된 카메라를 통하여 획득된 영상을 “공간 영상”이라고 명명하기로 한다.As an example, as illustrated in FIG. 9, the cloud server (20) according to the present invention is configured to receive an image of a space (10) using a camera (not illustrated) equipped on a robot (R) and perform Visual Localization to estimate the location of the robot from the received image. At this time, the camera is configured to capture (or sense) an image of the space (10), that is, an image of the surroundings of the robot (R). Hereinafter, for the convenience of explanation, an image acquired using a camera equipped on the robot (R) will be referred to as a “robot image.” And, an image acquired through a camera placed in a space (10) will be referred to as a “space image.”
클라우드 서버(20)는 도 9의 (a)에 도시된 것과 같이, 로봇(R)에 구비된 카메라(미도시)를 통하여 로봇 영상(910)을 획득하도록 이루어진다. 그리고, 클라우드 서버(20)는 획득된 로봇 영상(910)을 이용하여, 로봇(R)의 현재 위치를 추정할 수 있다.The cloud server (20) is configured to obtain a robot image (910) through a camera (not shown) equipped on the robot (R), as shown in (a) of Fig. 9. Then, the cloud server (20) can estimate the current location of the robot (R) using the obtained robot image (910).
클라우드 서버(20)는 로봇 영상(910)과 데이터베이스에 저장된 지도 정보를 비교하여, 도 9의 (b)에 도시된 것과 같이, 로봇(R)의 현재 위치에 대응하는 위치 정보(예를 들어, “3층 A구역 (3, 1, 1)”)를 추출할 수 있다. The cloud server (20) can compare the robot image (910) with the map information stored in the database, and extract the location information corresponding to the current location of the robot (R) (e.g., “3rd floor, Zone A (3, 1, 1)”), as shown in (b) of FIG. 9.
앞서 살펴본 것과 같이, 본 발명에서 공간(10)에 대한 지도는 사전에 공간(10)을 이동하는 적어도 하나의 로봇에 의해, SLAM(Simultaneous Localization and Mapping)에 기반하여 작성된 지도일 수 있다. 특히, 공간(10)에 대한 지도는, 영상 정보를 기반으로 생성된 지도일 수 있다. As previously discussed, in the present invention, the map for the space (10) may be a map created based on SLAM (Simultaneous Localization and Mapping) by at least one robot moving through the space (10) in advance. In particular, the map for the space (10) may be a map created based on image information.
즉, 공간(10)에 대한 지도는 vision(또는 visual)기반의 SLAM기술에 의하여 생성된 지도일 수 있다.That is, the map for space (10) may be a map generated by vision (or visual)-based SLAM technology.
따라서, 클라우드 서버(20)는 로봇(R)에서 획득된 로봇 영상(910)에 대해 도 9의 (b)에 도시된 것과 같이 좌표 정보(예를 들어, (3층, A구역(3, 1,1,))를 특정할 수 있다. 이와 같이, 특정된 좌표 정보는 곧, 로봇(R)의 현재 위치 정보가 될 수 있다.Accordingly, the cloud server (20) can specify coordinate information (e.g., (3rd floor, area A (3, 1, 1,)) for the robot image (910) obtained from the robot (R) as shown in (b) of FIG. 9. In this way, the specified coordinate information can become the current location information of the robot (R).
이때, 클라우드 서버(20)는, 로봇(R)에서 획득된 로봇 영상(910)과 vision(또는 visual)기반의 SLAM 기술에 의하여 생성된 지도를 비교함으로써, 로봇(R)의 현재 위치를 추정할 수 있다. 이 경우, 클라우드 서버(20)는 i)로봇 영상(910)과 기 생성된 지도를 구성하는 이미지들 간의 이미지 비교를 이용하여, 로봇 영상(910)과 가장 비슷한 이미지를 특정하고, ii)특정된 이미지에 매칭된 위치 정보를 획득하는 방식으로 로봇(R)의 위치 정보를 특정할 수 있다.At this time, the cloud server (20) can estimate the current location of the robot (R) by comparing the robot image (910) obtained from the robot (R) with the map generated by the vision (or visual)-based SLAM technology. In this case, the cloud server (20) can specify the location information of the robot (R) by i) specifying the image most similar to the robot image (910) by using image comparison between the robot image (910) and the images constituting the previously generated map, and ii) obtaining location information matching the specified image.
이와 같이, 클라우드 서버(20)는 도 9의 (a)에 도시된 것과 같이, 로봇(R)에서 로봇 영상(910)이 획득되면, 획득된 로봇 영상(910)을 이용하여, 로봇의 현재 위치를 특정할 수 있다. 앞서 살펴본 것과 같이, 클라우드 서버(20)는 데이터베이스에 기 저장된 지도 정보(예를 들어, “참조 맵”으로도 명명 가능)로부터, 상기 로봇 영상(910)에 대응되는 위치 정보(예를 들어, 좌표 정보)를 추출할 수 있다.In this way, when the cloud server (20) acquires a robot image (910) from the robot (R) as shown in (a) of FIG. 9, the cloud server (20) can use the acquired robot image (910) to identify the current location of the robot. As described above, the cloud server (20) can extract location information (e.g., coordinate information) corresponding to the robot image (910) from map information (e.g., also called a “reference map”) stored in a database.
한편, 위의 설명에서는, 클라우드 서버(20)에서 로봇(R)의 위치를 추정하는 예에 대하여 설명하였으나, 앞서 살펴본 것과 같이, 로봇(R)의 위치 추정은 로봇(R) 자체에서 이루어질 수 있다. 즉, 로봇(R)은 로봇(R) 자체에서 수신되는 영상에 근거하여, 앞서 살펴본 방식으로 현재 위치를 추정할 수 있다. 그리고, 로봇(R)은, 추정된 위치 정보를 클라우드 서버(20)에 전송할 수 있다. 이 경우, 클라우드 서버(20)는 로봇으로부터 수신되는 위치 정보에 기반하여, 일련의 제어를 수행할 수 있다.Meanwhile, in the above description, an example of estimating the position of the robot (R) in the cloud server (20) was described, but as previously discussed, the position estimation of the robot (R) can be performed in the robot (R) itself. That is, the robot (R) can estimate the current position based on the image received from the robot (R) itself in the previously discussed manner. Then, the robot (R) can transmit the estimated position information to the cloud server (20). In this case, the cloud server (20) can perform a series of controls based on the position information received from the robot.
이와 같이, 로봇 영상(910)으로부터 로봇(R)의 위치 정보가 추출되면, 클라우드 서버(20)는 상기 위치 정보와 대응되는 실내 공간(10)에 배치된 적어도 하나의 카메라(121)를 특정할 수 있다. 클라우드 서버(20)는 데이터베이스에 저장된 카메라(121)와 관련된 매칭 정보로부터, 상기 위치 정보에 대응되는 실내 공간(10)에 배치된 카메라(121)를 특정할 수 있다.In this way, when the location information of the robot (R) is extracted from the robot image (910), the cloud server (20) can specify at least one camera (121) positioned in an indoor space (10) corresponding to the location information. The cloud server (20) can specify the camera (121) positioned in an indoor space (10) corresponding to the location information from matching information related to the camera (121) stored in the database.
이러한 영상들은, 로봇의 위치 추정 뿐만 아니라, 로봇에 대한 관제에도 활용될 수 있다. 예를 들어, 클라우드 서버(20)는, 로봇(R)의 관제를 위하여, 로봇(R) 자체에서 획득되는 로봇 영상(910) 및 로봇(R)이 위치한 공간에 배치된 카메라(121)로부터 획득된 영상을 관제 시스템의 디스플레이부에 함께 출력시킬 수 있다. 따라서, 건물(1000) 내에서 또는 외부에서 로봇(R)을 원격으로 관리 및 제어하는 관리자가, 로봇(R)에서 획득되는 로봇 영상(910) 뿐만 아니라, 로봇(R)이 위치한 공간에 대한 영상을 고려하여 로봇(R)에 대한 원격 제어를 수행하도록 할 수 있다.These images can be utilized not only for estimating the location of the robot but also for controlling the robot. For example, the cloud server (20) can output the robot image (910) acquired from the robot (R) itself and the image acquired from the camera (121) placed in the space where the robot (R) is located, together on the display unit of the control system, in order to control the robot (R). Accordingly, a manager who remotely manages and controls the robot (R) inside or outside the building (1000) can perform remote control of the robot (R) by considering not only the robot image (910) acquired from the robot (R) but also the image of the space where the robot (R) is located.
다른 예로서, 실내 공간(10)을 주행하는 로봇의 위치 추정은, 도 10의 (a)에 도시된 것과 같이, 실내 공간(10)에 구비된 태그(1010)에 기반하여 이루어질 수 있다.As another example, the position estimation of a robot moving in an indoor space (10) can be performed based on a tag (1010) provided in the indoor space (10), as shown in (a) of FIG. 10.
도 10을 참조하면, 태그(1010)에는 도 10의 (b)에 도시된 것과 같이, 태그(1010)가 부착된 지점에 대응되는 위치 정보가 매칭되어 존재할 수 있다. 즉, 건물(1000)의 실내 공간(10)의 서로 다른 복수의 지점에는 서로 다른 식별 정보를 갖는 태그(1010)들이 각각 구비될 수 있다. 태그 각각의 식별 정보 및 태그가 부착된 지점의 위치 정보는 서로 매칭되어, 데이터베이스 상에 존재할 수 있다.Referring to FIG. 10, the tag (1010) may have location information corresponding to the point where the tag (1010) is attached, as shown in (b) of FIG. 10. That is, tags (1010) having different identification information may be provided at different points in the indoor space (10) of the building (1000). The identification information of each tag and the location information of the point where the tag is attached may be matched with each other and may exist in the database.
나아가, 태그(1010)에는, 각각의 태그(1010)에 매칭된 위치 정보를 포함하도록 이루어질 수 있다.Furthermore, the tags (1010) may be configured to include location information matching each tag (1010).
로봇(R)은 로봇(R)에 구비된 센서를 이용하여, 공간(10)에 구비된 태그(1010)를 인식할 수 있다. 이러한 인식을 통해, 로봇(R)은 태그(1010)에 포함된 위치 정보를 추출함으로써, 로봇(R)의 현재 위치를 파악할 수 있다. 이러한 추출된 위치 정보는 통신부(110)를 통해, 로봇(R)에서 클라우드 서버(20)로 전송될 수 있다. 따라서, 클라우드 서버(20)는 태그를 센싱한 로봇(R)으로부터 수신된 위치 정보에 근거하여, 건물(20)을 주행하는 로봇들의 위치를 모니터링할 수 있다.The robot (R) can recognize a tag (1010) equipped in a space (10) using a sensor equipped in the robot (R). Through this recognition, the robot (R) can extract location information included in the tag (1010) to determine the current location of the robot (R). This extracted location information can be transmitted from the robot (R) to the cloud server (20) through the communication unit (110). Accordingly, the cloud server (20) can monitor the locations of robots moving in the building (20) based on the location information received from the robot (R) that sensed the tag.
나아가, 로봇(R)은 인식된 태그(1010)의 식별 정보를, 클라우드 서버(20)로 전송할 수 있다. 클라우드 서버(20)는 데이터베이스로부터, 태그(1010)의 식별 정보에 매칭된 위치 정보를 추출하여, 건물(1000) 내에서 로봇의 위치를 모니터링할 수 있다. Furthermore, the robot (R) can transmit the identification information of the recognized tag (1010) to the cloud server (20). The cloud server (20) can extract location information matching the identification information of the tag (1010) from the database and monitor the location of the robot within the building (1000).
한편, 위에서 설명한 태그(1010)의 용어는 다양하게 명명될 수 있다. 예를 들어, 이러한 태그(1010)는 QR코드, 바코드, 식별 표지 등으로 다양하게 명명되는 것이 가능하다. 한편, 위에서 살펴본 태그의 용어는 “마커(marker)”로 대체되어 사용되어질 수 있다.Meanwhile, the term of the tag (1010) described above may be named in various ways. For example, the tag (1010) may be named in various ways, such as QR code, barcode, identification mark, etc. Meanwhile, the term of the tag examined above may be used instead of “marker.”
이하에서는, 건물(1000)의 실내 공간(10)에 위치한 로봇(R)의 위치를 모니터링 하는 방법 중 로봇(R)에 구비된 식별 표지를 이용하여, 로봇(R)을 모니터링 하는 방법에 대하여 살펴본다.Below, a method of monitoring the location of a robot (R) located in an indoor space (10) of a building (1000) by using an identification tag provided on the robot (R) will be described.
앞서, 데이터베이스에는, 로봇(R)에 대한 다양한 정보가 저장될 수 있음을 살펴보았다. 로봇(R)에 대한 다양한 정보는 실내 공간(10)에 위치한 로봇(R)을 식별하기 위한 식별 정보(예를 들어, 일련번호, TAG 정보, QR코드 정보 등),를 포함할 수 있다. As mentioned above, we have seen that various information about a robot (R) can be stored in a database. The various information about a robot (R) can include identification information (e.g., serial number, TAG information, QR code information, etc.) for identifying a robot (R) located in an indoor space (10).
한편, 로봇(R)의 식별 정보는 도 11에 도시된 것과 같이, 로봇(R)에 구비된 식별 표지(또는 식별 마크)에 포함될 수 있다. 이러한 식별 표지는 건물 제어 시스템(1000a), 설비 인프라(200)에 의하여 센싱되거나, 스캔되는 것이 가능하다. 도 11의 (a), (b) 및 (c)에 도시된 것과 같이, 로봇(R)의 식별 표지(1101. 1102. 1103)는 로봇의 식별 정보를 포함할 수 있다. 도시와 같이, 식별 표지(1101. 1102. 1103)는 바코드 (barcode, 1101), 일련 정보(또는 시리얼 정보, 1102), QR코드(1103), RFID태그(미도시됨) 또는 NFC 태그(미도시됨) 등으로 나타내어 질 수 있다. 바코드 (barcode, 1101), 일련 정보(또는 시리얼 정보, 1102), QR코드(1103), RFID태그(미도시됨) 또는 NFC 태그(미도시됨) 등은 식별 표지가 구비된(또는 부착된) 로봇의 식별 정보를 포함하도록 이루어질 수 있다. Meanwhile, the identification information of the robot (R) may be included in an identification mark (or identification tag) provided on the robot (R), as illustrated in FIG. 11. This identification mark may be sensed or scanned by the building control system (1000a) or the facility infrastructure (200). As illustrated in (a), (b), and (c) of FIG. 11, the identification marks (1101, 1102, 1103) of the robot (R) may include identification information of the robot. As illustrated, the identification marks (1101, 1102, 1103) may be represented by a barcode (1101), serial information (or serial information, 1102), a QR code (1103), an RFID tag (not illustrated), or an NFC tag (not illustrated). A barcode (1101), serial information (or serial information, 1102), QR code (1103), RFID tag (not shown), or NFC tag (not shown) may be used to include identification information of a robot equipped with (or attached to) an identification mark.
로봇의 식별 정보는, 로봇 각각을 구분하기 위한 정보로서, 동일한 종류의 로봇이더라도, 서로 다른 식별 정보를 가질 수 있다. 한편, 식별 표지를 구성하는 정보는, 위에서 살펴본 바코드, 일련 정보, QR코드, RFID태그(미도시됨) 또는 NFC 태그(미도시됨) 외에도 다양하게 구성될 수 있다.The identification information of the robot is information for distinguishing each robot, and even if they are the same type of robot, they may have different identification information. Meanwhile, the information constituting the identification mark may be composed of various other than the barcode, serial information, QR code, RFID tag (not shown), or NFC tag (not shown) discussed above.
클라우드 서버(20)는 실내 공간(10)에 배치된 카메라, 다른 로봇에 구비된 카메라, 또는 설비 인프라에 구비된 카메라로부터 수신되는 영상으로부터 로봇(R)의 식별 정보를 추출하여, 실내 공간(10)에서 로봇의 위치를 파악하고, 모니터링할 수 있다. 한편, 식별 표지를 센싱하는 수단은 반드시 카메라에 한정될 필요 없으며, 식별 표지의 형태에 따라 센싱부(예를 들어, 스캔부)가 이용될 수 있다. 이러한 센싱부는, 실내 공간(10), 로봇들 및 설비 인프라(200) 중 적어도 하나에 구비될 수 있다.The cloud server (20) can extract identification information of the robot (R) from images received from a camera placed in the indoor space (10), a camera equipped on another robot, or a camera equipped on the facility infrastructure, and can identify and monitor the location of the robot in the indoor space (10). Meanwhile, the means for sensing the identification mark is not necessarily limited to a camera, and a sensing unit (e.g., a scanning unit) can be used depending on the shape of the identification mark. Such a sensing unit can be equipped in at least one of the indoor space (10), the robots, and the facility infrastructure (200).
일 예로서, 카메라에서 촬영된 영상으로부터 식별 표지가 센싱된 경우, 클라우드 서버(20)는 카메라로부터 수신되는 영상으로부터 로봇(R)의 위치를 파악할 수 있다. 이때, 클라우드 서버(20)는 카메라가 배치된 위치 정보 및 영상에서의 로봇의 위치 정보(정확하게는, 로봇을 피사체로하여 촬영된 영상에서, 로봇에 대응되는 그래픽 객체의 위치 정보) 중 적어도 하나에 근거하여, 로봇(R)이 위치를 파악할 수 있다.For example, when an identification mark is sensed from an image captured by a camera, the cloud server (20) can identify the location of the robot (R) from the image received from the camera. At this time, the cloud server (20) can identify the location of the robot (R) based on at least one of the location information of the camera placement and the location information of the robot in the image (more precisely, the location information of the graphic object corresponding to the robot in the image captured with the robot as the subject).
데이터베이스 상에는, 실내 공간(10)에 배치된 카메라에 대한 식별 정보와 함께, 카메라가 배치된 장소에 대한 위치 정보가 매칭되어 존재할 수 있다. 따라서, 클라우드 서버(20)는 영상을 촬영한 카메라의 식별정보와 매칭된 위치 정보를 데이터베이스로부터 추출하여, 로봇(R)의 위치정보를 추출할 수 있다.In the database, location information about the location where the camera is placed can be matched with identification information about the camera placed in the indoor space (10). Accordingly, the cloud server (20) can extract location information of the robot (R) by extracting the location information matched with the identification information of the camera that captured the image from the database.
다른 예로서, 스캔부에 의해 식별 표지가 센싱된 경우, 클라우드 서버(20)는 스캔부로터 센싱된 스캔 정보로부터 로봇(R)의 위치를 파악할 수 있다. 데이터베이스 상에는, 실내 공간(10)에 배치된 스캔부에 대한 식별 정보와 함께, 스캔부가 배치된 장소에 대한 위치 정보가 매칭되어 존재할 수 있다. 따라서, 클라우드 서버(20)는 로봇에 구비된 식별 표지를 스캔한 스캔부에 매칭된 위치 정보를 데이터베이스로부터 추출하여, 로봇(R)의 위치정보를 추출할 수 있다.As another example, when an identification mark is sensed by a scanning unit, the cloud server (20) can identify the location of the robot (R) from the scan information sensed by the scanning unit. In the database, the location information for the place where the scanning unit is placed can be matched with the identification information for the scanning unit placed in the indoor space (10). Accordingly, the cloud server (20) can extract the location information of the robot (R) by extracting the location information matched to the scanning unit that scanned the identification mark equipped on the robot from the database.
위에서 살펴본 것과 같이, 본 발명에 따른 건물에서는, 건물에 구비된 다양한 인프라를 이용하여, 로봇의 위치를 추출하고, 모니터링하는 것이 가능하다. 나아가, 클라우드 서버(20)는 이러한 로봇의 위치를 모니터링 함으로써, 건물 내에서 로봇을 효율적이고, 정확하게 제어하는 것이 가능하다.As discussed above, in a building according to the present invention, it is possible to extract and monitor the location of a robot by utilizing various infrastructures provided in the building. Furthermore, the cloud server (20) monitors the location of the robot, thereby enabling efficient and accurate control of the robot within the building.
한편, 기술이 발전함에 따라 로봇의 활용도는 점차적으로 높아지고 있다. 종래 로봇은 특수한 산업분야(예를 들어, 산업 자동화 관련 분야)에서 활용되었으나, 점차적으로 인간이나 설비를 위해 유용한 작업을 수행할 수 있는 서비스 로봇으로 변모하고 있다.Meanwhile, as technology advances, the utilization of robots is gradually increasing. Previously, robots were used in special industrial fields (e.g., industrial automation-related fields), but they are gradually changing into service robots that can perform useful tasks for humans or facilities.
이와 같이 다양한 서비스를 제공할 수 있는 로봇은, 부여된 임무를 수행하기 위하여 도 8에 도시된 것과 같은 공간(10)을 주행하도록 이루어지거나, 특정 위치에서 푸드(food, 음식물) 등을 제조하도록 이루어질 수 있다. 로봇은, 이와 같이, 다양한 공간에 배치되어 부여된 임무(task) 또는 업무를 수행함으로써, 인간에게 유용한 서비스를 제공하도록 이루어질 수 있다.A robot capable of providing various services in this way can be configured to drive in a space (10) such as that shown in Fig. 8 to perform assigned tasks, or can be configured to manufacture food, etc., at a specific location. In this way, the robot can be configured to provide useful services to humans by being placed in various spaces and performing assigned tasks or work.
본 발명에서 설명하는 “임무(task)”는, 로봇(R)이 수행해야할 업무 또는 서비스 등으로도 표현되며, 특정 목적을 위하여, 로봇(R)이 사람, 사물과 같은 특정 객체에 대하여 특정 동작을 수행하는 것을 의미할 수 있다. The “task” described in the present invention is also expressed as a work or service that the robot (R) must perform, and may mean that the robot (R) performs a specific action on a specific object, such as a person or thing, for a specific purpose.
로봇(R)이 수행하는 “임무”는, 해당 임무와 관련된 복수의 “작업”을 포함할 수 있다. The “task” performed by the robot (R) may include multiple “tasks” related to the task.
“임무와 관련된 작업”은, 특정 임무를 제공하기 위하여 로봇(R)이 수행해야 하는 동작, 단계 또는 과정으로 이해될 수 있다. “Task-related tasks” may be understood as actions, steps or processes that a robot (R) must perform to provide a specific task.
“임무와 관련된 작업”은 로봇(R)이 수행하는 임무, 로봇(R)의 종류, 로봇(R)이 위치한 공간의 특성에 근거하여 다양하게 결정될 수 있다. “Task-related work” can be determined in various ways based on the task performed by the robot (R), the type of robot (R), and the characteristics of the space in which the robot (R) is located.
예를 들어, 임무가 “푸드(food) 제공”인 경우, 임무와 관련된 작업은, i) 푸드(food) 제조 작업, ii) 푸드(food) 포장 작업, iii) 푸드(food) 픽업 작업, iv) 서빙을 위한 주행 작업, v) 서빙을 위하여 서빙 대상(사용자 또는 테이블(table)에 접근하는 작업, vi) 서빙을 위해 로봇의 하드웨어를 구동하는 작업들을 포함할 수 있다. For example, if the mission is “serving food,” tasks related to the mission may include i) food manufacturing tasks, ii) food packaging tasks, iii) food pickup tasks, iv) driving tasks for serving, v) tasks of approaching a serving target (user or table) for serving, and vi) tasks of operating the robot’s hardware for serving.
위에서 열거한 예들 외에도, 로봇의 임무 및 임무와 관련된 작업의 종류는 다양할 수 있으며, 본 발명은 위의 예들에 한정되지 않는다.In addition to the examples listed above, the types of tasks and tasks related to the robot's mission may vary, and the present invention is not limited to the examples above.
한편, 본 발명에서 설명되는 “동작”은, 작업을 수행하기 위하여 로봇(R)에 의해 수행되는 움직임(또는 모션(motion))(ex: 로봇(R)에 구비된 일 구성요소(ex: 로봇 팔, 휠 등)의 움직임)이나, 로봇(R)에 구비된 다른 구성 요소(ex: 물품 수용함, 트레이 등의 움직임)으로 이해될 수 있다. 특정 작업은 적어도 하나의 동작으로 이루어질 수 있다. Meanwhile, the “operation” described in the present invention may be understood as a movement (or motion) performed by the robot (R) to perform a task (ex: movement of a component (ex: robot arm, wheel, etc.) equipped in the robot (R)) or another component (ex: movement of a product receiving box, tray, etc.) equipped in the robot (R). A specific task may be composed of at least one motion.
일 예로, 특정 작업이 푸드 제조 작업인 경우, 동작은 재료를 향해 로봇(R)이 이동하는 동작, 재료를 잡는 동작, 재료를 들어 올리는 동작, 재료를 이용하여 푸드를 제조하는 동작 등을 포함할 수 있다. For example, if a specific task is a food manufacturing task, the actions may include actions of the robot (R) moving toward materials, actions of grabbing materials, actions of lifting materials, actions of using materials to manufacture food, etc.
다른 예로, 특정 작업이 서빙을 위한 주행 작업인 경우, 동작은 주행, 정지, 코너(corner) 회전, 서빙 대상 음식물의 잡기 동작, 물품 수용함의 개폐 동작, 트레이에 서빙 대상 음식물을 싣는 동작 등을 포함할 수 있다. As another example, if a particular task is a driving task for serving, the actions may include driving, stopping, turning a corner, grabbing food to be served, opening and closing a container for receiving food, loading food to be served onto a tray, etc.
즉, 본 발명에서 설명되는 적어도 하나의 “동작”을 통해 특정 “작업”이 수행되고, 적어도 하나의 “작업”을 통해 특정 “임무”가 수행되는 것으로 이해될 수 있다. That is, it can be understood that a specific “operation” is performed through at least one “action” described in the present invention, and a specific “task” is performed through at least one “operation.”
다만, 특정 임무는 하나의 작업으로 수행될 수 있다. 특정 작업은 하나의 동작으로 수행될 수 있다. 따라서, 본 발명에서는 상황에 따라 “임무", “작업” 및 “동작”을 혼용하여 사용할 수 있다. 나아가, “임무", “작업” 및 “동작”은 모두 특정 서비스를 제공하기 위해 로봇(R)에 의해 수행되는 것은 당연하다. However, a specific task can be performed as a single operation. A specific task can be performed as a single action. Therefore, in the present invention, “task”, “task” and “action” can be used interchangeably depending on the situation. Furthermore, it is natural that “task”, “task” and “action” are all performed by the robot (R) to provide a specific service.
한편, 로봇(R)은, 하나의 로봇(R)이 특정 임무와 관련된 복수의 작업(전체 프로세스)를 수행하도록 이루어지거나, 복수의 로봇(R)이 특정 임무와 관련된 복수의 작업을 분담하여 수행하도록 이루어 질 수 있다. Meanwhile, the robot (R) may be configured such that one robot (R) performs multiple tasks (overall process) related to a specific task, or multiple robots (R) may perform multiple tasks related to a specific task by dividing them.
복수의 로봇(R)이 특정 임무와 관련된 복수의 작업을 분담하여 수행되는 임무를 본 발명에서는 “협업 임무”, “협업 업무”, “협업 서비스”, “협업 작업” 등으로 명명할 수 있다. In the present invention, a task performed by having multiple robots (R) share multiple tasks related to a specific task may be referred to as a “collaborative task,” “collaborative work,” “collaborative service,” “collaborative task,” etc.
예를 들어, 임무가 “푸드(food) 제공”인 경우, i) 푸드(food) 제조 작업 및 푸드(food) 포장 작업은 푸드(food) 제조 및 포장 작업에 특화된 로봇에 의해 수행되고, ii) 서빙을 위한 주행 작업, 서빙을 위하여 서빙 대상(사용자 또는 테이블(table)에 접근하는 작업, 서빙을 위해 로봇의 하드웨어를 구동하는 작업은 배송(배달 또는 서빙)에 특화된 로봇에 의해 수행될 수 있다. For example, if the task is “food serving,” i) the food manufacturing and food packaging tasks may be performed by robots specialized in food manufacturing and packaging tasks, and ii) the driving tasks for serving, the tasks of approaching a serving target (user or table) for serving, and the tasks of operating the robot’s hardware for serving may be performed by robots specialized in delivery (delivery or serving).
한편, 복수의 로봇에 의한 협업 임무는, 네트워크(40)에 기반하여, 클라우드 서버(20)에 의해 복수의 로봇이 제어됨으로써 이루어지거나(제1 협업 방식), 복수의 로봇 간에 직접 통신을 함으로써 이루어질 수(제2 협업 방식) 있다. Meanwhile, a collaborative task by multiple robots can be accomplished by controlling multiple robots by a cloud server (20) based on a network (40) (first collaborative method) or by directly communicating between multiple robots (second collaborative method).
본 발명에서는, 네트워크(40)를 이용하지 않고, 제1 로봇(R1) 및 제2 로봇(R2)에 구비된 정보 출력 수단(ex: 마커, 적외선 LED, RGB LED 등) 및 센싱 수단(카메라, 마커 리더기, 적외선 수신기 등)을 이용하여 통신을 수행함으로써, 협업 임무를 수행하도록 하는 복수의 로봇들을 이용한 협업 방법 및 시스템(이하, 로봇 협업 방법 및 시스템)을 제공할 수 있다. In the present invention, a collaboration method and system (hereinafter, “robot collaboration method and system”) using a plurality of robots that perform a collaboration task can be provided by performing communication using information output means (ex: marker, infrared LED, RGB LED, etc.) and sensing means (camera, marker reader, infrared receiver, etc.) equipped on a first robot (R1) and a second robot (R2) without using a network (40).
이하에서는, 첨부된 도면과 함께 본 발명에 따른 로봇 협업 방법 및 시스템에 대해서 구체적으로 설명하도록 한다. 도 12는 본 발명에 따른 복수의 로봇들을 이용한 협업 방법을 설명하기 위한 개념도이다. 도 13 및 도 14는 협업을 수행하는 로봇을 설명하기 위한 블록도들이고, 도 15는 본 발명에 따른 복수의 로봇들을 이용한 협업 방법 을 설명하기 위한 흐름도이고, 도 16, 도 17, 도 18 및 도 19는 본 발명에 따른 로봇에서 출력되는 정보를 설명하기 위한 개념도들이며, 도 20a 및 도 20b는 본 발명에 따른 복수의 로봇들을 이용한 협업을 위해 데이터 통신을 수행하는 방법을 설명하기 위한 개념도들이고, 도 21은 본 발명에서 로봇 간의 협업을 위한 연동을 설명하기 위한 개념도들이고, 도 22는 본 발명에 따른 로봇이 작업 이력을 업데이트 하는 것을 설명하기 위한 개념도이며, 도 23 및 도 24는 본 발명에 따른 로봇 협업에 관리자가 개입하는 방법을 설명하기 위한 개념도이다. Hereinafter, a robot collaboration method and system according to the present invention will be specifically described with reference to the attached drawings. Fig. 12 is a conceptual diagram for explaining a collaboration method using a plurality of robots according to the present invention. Figs. 13 and 14 are block diagrams for explaining robots performing collaboration, Fig. 15 is a flowchart for explaining a collaboration method using a plurality of robots according to the present invention, Figs. 16, 17, 18 and 19 are conceptual diagrams for explaining information output from a robot according to the present invention, Figs. 20a and 20b are conceptual diagrams for explaining a method for performing data communication for collaboration using a plurality of robots according to the present invention, Fig. 21 is a conceptual diagram for explaining linkage for collaboration between robots in the present invention, Fig. 22 is a conceptual diagram for explaining a robot updating a work history according to the present invention, and Figs. 23 and 24 are conceptual diagrams for explaining a method for a manager to intervene in robot collaboration according to the present invention.
본 발명은 복수의 로봇(R)들이 협업 하여 임무를 수행하도록 하는, 로봇 협업 방법 및 시스템에 관한 것이다. The present invention relates to a robot collaboration method and system that enables a plurality of robots (R) to collaborate to perform a task.
본 발명에서 설명되는 로봇은, 수행되는 기능(또는 특화된 기능)에 근거하여 로봇의 종류가 구분될 수 있다. 본 발명에서는, 제1 기능을 수행하는 로봇을 제1 로봇(R1)으로 명명하고, 제2 기능을 수행하는 로봇을 제2 로봇(R2)으로 명명할 수 있다. The robots described in the present invention can be classified into types based on the function (or specialized function) performed. In the present invention, a robot performing a first function can be named a first robot (R1), and a robot performing a second function can be named a second robot (R2).
여기에서, “기능”은 로봇이 수행하는 작업과 관련된 것으로, 특정 작업을 수행할 수 있는 능력으로 이해될 수 있다. Here, “function” relates to the work performed by the robot and can be understood as the ability to perform a specific task.
예를 들어, 도 12에 도시된 것과 같이, “푸드(food) 제공” 임무는, 푸드(food) 제조 작업 및 푸드(food) 포장 작업의 기능을 수행하는 제1 로봇(R1)과, 서빙을 위한 주행 작업, 서빙을 위하여 서빙 대상(사용자 또는 테이블(table)에 접근하는 작업, 서빙을 위해 로봇의 하드웨어를 구동하는 작업의 기능을 수행하는 제2 로봇(R2)의 협업에 의해 수행될 수 있다. For example, as illustrated in FIG. 12, the “food serving” task can be performed through collaboration between a first robot (R1) that performs the functions of food manufacturing and food packaging, and a second robot (R2) that performs the functions of driving for serving, approaching a serving target (user or table) for serving, and driving the hardware of the robot for serving.
본 발명에서는 설명의 편의를 위하여, 제1 로봇(R1)은 제조 로봇 또는 협동 로봇을 예로 들어 설명하도록 한다. 예를 들어, 제1 로봇(R1)인 협동 로봇은, 사람(또는 사용자)과 상호 작용하여 또는 단독으로 푸드(food)를 제조하거나, 물건을 조립 또는 생성하는 등의 기능을 수행할 수 있다. In the present invention, for the convenience of explanation, the first robot (R1) is explained by using a manufacturing robot or a collaborative robot as an example. For example, the first robot (R1), a collaborative robot, can perform functions such as manufacturing food, assembling or creating objects, or interacting with a person (or user) or independently.
나아가, 본 발명에서는 설명의 편의를 위하여, 제2 로봇(R2)은 다양한 서비스를 제공하는 기능을 가지는 서비스 로봇을 예로 들어 설명하도록 한다. 예를 들어, 제2 로봇(R2)인 서비스 로봇은 공간(10)을 주행하면서 오브젝트(예를 들어, 푸드(food), 택배, 물건 등)를 사람에게 배송 로봇이거나, 공간(10)을 청소하는 청소 로봇일 수 있다. Furthermore, for the convenience of explanation, in the present invention, the second robot (R2) is described as a service robot having a function of providing various services. For example, the second robot (R2), a service robot, may be a robot that delivers objects (e.g., food, parcels, items, etc.) to people while driving in a space (10), or a cleaning robot that cleans a space (10).
위에서 열거한 내용은 설명의 편의를 위한 일 예시에 불과하며, 제1 로봇(R1) 및 제2 로봇(R2) 모두 협동 로봇(또는 제조 로봇)이거나, 제1 로봇(R1) 및 제2 로봇(R2) 모두 서비스 로봇이거나, 제1 로봇(R1)이 서비스 로봇이고 제2 로봇(R2)이 협동 로봇일 수 있다.The above is only an example for convenience of explanation, and both the first robot (R1) and the second robot (R2) may be collaborative robots (or manufacturing robots), or both the first robot (R1) and the second robot (R2) may be service robots, or the first robot (R1) may be a service robot and the second robot (R2) may be a collaborative robot.
즉, 본 발명에서는 제1 로봇(R1)이 협동 로봇이고, 제2 로봇(R2)이 서비스 로봇인 예에 한정되지 않는다. That is, the present invention is not limited to an example in which the first robot (R1) is a collaborative robot and the second robot (R2) is a service robot.
한편, 본 발명에서는, 네트워크(40)를 이용하지 않고, 제1 로봇(R1) 및 제2 로봇(R2)에 구비된 정보 출력 수단 및 센싱 수단을 이용하여 통신을 수행함으로써, 협업 임무를 수행할 수 있다. 이하에서는, 협업 임무를 수행할 수 있는 제1 로봇(R1) 및 제2 로봇(R2)에 대해 구체적으로 설명하도록 한다. Meanwhile, in the present invention, a collaborative task can be performed by performing communication using the information output means and sensing means provided in the first robot (R1) and the second robot (R2) without using a network (40). Hereinafter, the first robot (R1) and the second robot (R2) capable of performing a collaborative task will be described in detail.
도 13에 도시된 것과 같이, 제1 로봇(R1)은, 통신부(1310), 저장부(1320), 출력부(1330), 센싱부(1340) 및 제어부(1350) 중 적어도 하나의 구성을 포함하도록 이루어질 수 있다. As illustrated in FIG. 13, the first robot (R1) may be configured to include at least one of a communication unit (1310), a storage unit (1320), an output unit (1330), a sensing unit (1340), and a control unit (1350).
제1 로봇(R1)의 통신부(1310)는, 클라우드 서버(20) 및 다른 로봇(ex: R2) 중 적어도 하나와 통신할 수 있다. 예를 들어, 통신부(1310)는 저장부(1320)에 저장된 협업 정보를 클라우드 서버(20)로 전송하거나, 다른 로봇(ex: R2)과 협업하여 임무를 수행하기 위하여 정보를 송수신 할 수 있다. The communication unit (1310) of the first robot (R1) can communicate with at least one of the cloud server (20) and another robot (ex: R2). For example, the communication unit (1310) can transmit collaboration information stored in the storage unit (1320) to the cloud server (20) or transmit and receive information to perform a task in collaboration with another robot (ex: R2).
다음으로 제1 로봇(R1)의 저장부(1320)는, 본 발명과 관련된 다양한 정보를 저장하도록 이루어질 수 있다. 본 발명에서 저장부(1320)에는 제1 로봇(R1)에 대한 정보가 저장될 수 있다.Next, the storage unit (1320) of the first robot (R1) can be configured to store various information related to the present invention. In the present invention, information about the first robot (R1) can be stored in the storage unit (1320).
제1 로봇(R1)에 대한 정보는 매우 다양할 수 있으며, 일 예로서, i)공간(10)에 배치된 제1 로봇(R1)을 식별하기 위한 식별 정보(예를 들어, 일련번호, ID 등), ii) 제1 로봇(R1)에 부여된 임무 정보, iii) 제1 로봇(R1)의 상태 정보, iv) 제1 로봇(R1)에 구비된 센서에 의해 센싱된 정보, v) 제1 로봇(R1)의 동작과 관련된 동작 정보 등이 존재할 수 있다. Information about the first robot (R1) can be very diverse, and as examples, there may be i) identification information (e.g., serial number, ID, etc.) for identifying the first robot (R1) placed in the space (10), ii) task information assigned to the first robot (R1), iii) status information of the first robot (R1), iv) information sensed by sensors equipped in the first robot (R1), v) operation information related to the operation of the first robot (R1), etc.
나아가, 제1 로봇(R1)의 저장부(1320)에는, 다른 로봇(ex: 제2 로봇)과 협업하여 수행한 임무 또는 작업 관련된 다양한 정보를 포함하는 협업 정보를 포함할 수 있다. Furthermore, the storage unit (1320) of the first robot (R1) may include collaboration information including various information related to tasks or operations performed in collaboration with another robot (ex: the second robot).
제1 로봇(R1)과 관련된 협업 정보는 i) 제1 로봇(R1)에서 출력된 점멸 신호(1441)을 포함하는 영상, ii) 제1 로봇(R1)에서 출력된 점멸 신호(1441) 포함된 정보(제어 명령 등), iii) 제1 로봇(R1)에서 점멸 신호(1441)를 출력한 일시 정보, vi) 제1 로봇(R1)에서 센싱된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나를 포함하는 영상, v) 제1 로봇(R1)에서 센싱된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나에 포함된(또는 해석된 정보), vi) 제1 로봇(R1)이 수행한 동작 및 동작 수행 일시 정보 중 적어도 하나를 포함할 수 있다. Collaboration information related to the first robot (R1) may include at least one of: i) an image including a blinking signal (1441) output from the first robot (R1), ii) information (control command, etc.) included in the blinking signal (1441) output from the first robot (R1), iii) information on the time at which the blinking signal (1441) was output from the first robot (R1), vi) an image including at least one of a first marker (1441) and a second marker (1442) sensed by the first robot (R1), v) information included (or interpreted) in at least one of the first marker (1441) and the second marker (1442) sensed by the first robot (R1), vi) information on an action performed by the first robot (R1) and the time at which the action was performed.
본 발명에서 설명되는, “작업 이력”에는 이러한 협업 정보가 적어도 하나 포함되거나, 협업 정보에 근거하여 생성되는 정보일 수 있다. The “work history” described in the present invention may include at least one such collaboration information, or may be information generated based on the collaboration information.
다음으로 제1 로봇(R1)의 출력부(1330)는, 제2 로봇(R2)과 협업으로 임무를 수행하기 위하여, 제2 로봇(R2)에 대한 제어 신호를 출력할 수 있다. Next, the output unit (1330) of the first robot (R1) can output a control signal to the second robot (R2) in order to perform a task in collaboration with the second robot (R2).
제1 로봇(R1)의 출력부(1330)는 복수의 광(예를 들어, 적외선 LED, RGB LED)출력부를 포함하도록 이루어질 수 있다. 제1 로봇(R1)의 제어부(1350)는 출력부(1330)를 제어하여, 복수의 광 출력부 중 적어도 하나가 점등 상태 또는 소등 상태로 이루어지도록 하여, 제2 로봇(R2)에 대한 제어 신호에 대응되는 점멸 신호를 출력할 수 있다. The output unit (1330) of the first robot (R1) may be configured to include a plurality of light (e.g., infrared LED, RGB LED) output units. The control unit (1350) of the first robot (R1) controls the output unit (1330) so that at least one of the plurality of light output units is turned on or off, thereby outputting a blinking signal corresponding to a control signal for the second robot (R2).
“점멸 신호”는, 제1 로봇(R1)의 출력부(1330)에 포함된 복수의 광 출력부가 점등 또는 소등되어 생성되는 정보로, 제어부(1350)는 i) 광 점등 상태(복수의 광 출력부 중 적어도 일부의 광 출력부는 점등되고 다른 일부의 광 출력부는 소등되어 있는 상태), ii) 광 점멸 상태(복수의 광 출력부 중 특정 광 출력부가 일정 주기, 일정 시간을 간격으로 점등 및 소등을 반복하는 상태), iii) 펄스(pulse, 광의 전압이나 전류 또는 파동) 중 적어도 하나를 이용하여 정보를 생성할 수 있다. The “blinking signal” is information generated by turning on or off a plurality of light output units included in the output unit (1330) of the first robot (R1), and the control unit (1350) can generate information by using at least one of i) a light lighting state (a state in which at least some of the light output units among the plurality of light output units are lit and other light output units are off), ii) a light blinking state (a state in which a specific light output unit among the plurality of light output units is repeatedly lit and off at regular intervals, for a regular period of time), and iii) a pulse (voltage or current or wave of light).
다음으로, 제1 로봇(R1)의 센싱부(1340)는 제2 로봇(R2)의 디스플레이부(1440)에 출력되는 마커(1441, 1442)를 센싱 할 수 있도록 이루어질 수 있다. Next, the sensing unit (1340) of the first robot (R1) can be configured to sense markers (1441, 1442) output to the display unit (1440) of the second robot (R2).
예를 들어, 제1 로봇(R1)의 센싱부(1340)는 카메라, QR 코드 리더기, 바코드 리더기 중 적어도 하나로 이루어지며, 카메라, QR 코드 리더기, 바코드 리더기 중 적어도 하나를 이용하여, 제1 마커(1441) 및 제2 마커(1442)를 센싱 할 수 있다. For example, the sensing unit (1340) of the first robot (R1) is composed of at least one of a camera, a QR code reader, and a barcode reader, and can sense the first marker (1441) and the second marker (1442) using at least one of the camera, the QR code reader, and the barcode reader.
다음으로, 제1 로봇(R1)의 제어부(1350)는, 제1 로봇(R1)의 전반적인 동작을 제어하도록 이루어질 수 있다. 제1 로봇(R1)의 제어부(1350)는 위에서 살펴본 제1 로봇(R1)의 구성요소들을 통해 입력 또는 출력되는 데이터, 정보 등을 처리하거나 기관에게 적절한 정보 또는 기능을 제공 또는 처리할 수 있다. Next, the control unit (1350) of the first robot (R1) can be configured to control the overall operation of the first robot (R1). The control unit (1350) of the first robot (R1) can process data, information, etc. input or output through the components of the first robot (R1) discussed above, or provide or process appropriate information or functions to the institution.
제1 로봇(R1)의 제어부(1350)는 할당된 특정 임무를 수행하기 위하여, 제1 로봇(R1)의 동작을 제어할 수 있다. 예를 들어, 특정 임무가 “푸드 제공 임무”인 경우, 제1 로봇(R1)의 제어부(1350)는 제1 로봇(R1)이 푸드 제공 임무에 포함된 복수의 작업 중 푸드 제조를 수행하도록 제1 로봇(R1)의 동작을 제어할 수 있다. The control unit (1350) of the first robot (R1) can control the operation of the first robot (R1) to perform a specific assigned task. For example, if the specific task is a “food providing task,” the control unit (1350) of the first robot (R1) can control the operation of the first robot (R1) so that the first robot (R1) performs food manufacturing among the multiple tasks included in the food providing task.
나아가, 제1 로봇(R1)의 제어부(1350)는 제2 로봇(R2)과 협업하여 특정 임무를 수행하기 위하여, 제2 로봇(R2)의 동작을 제어하는 제어 명령에 대응되는 제어 신호(또는 점멸 신호)를 제1 로봇(R1)의 출력부(1330)상에 출력하도록 제어할 수 있다. Furthermore, the control unit (1350) of the first robot (R1) can control the output unit (1330) of the first robot (R1) to output a control signal (or blinking signal) corresponding to a control command that controls the operation of the second robot (R2) in order to perform a specific task in collaboration with the second robot (R2).
한편, 도 14에 도시된 것과 같이, 제2 로봇(R2)은, 통신부(1410), 저장부(1420), 주행부(1430), 디스플레이부(1440), 카메라부(1450), 센싱부(1460) 및 제어부(1470) 중 적어도 하나의 구성을 포함하도록 이루어질 수 있다. Meanwhile, as illustrated in FIG. 14, the second robot (R2) may be configured to include at least one of a communication unit (1410), a storage unit (1420), a driving unit (1430), a display unit (1440), a camera unit (1450), a sensing unit (1460), and a control unit (1470).
제2 로봇(R2)의 통신부(1410)는, 클라우드 서버(20) 및 다른 로봇(ex: R1) 중 적어도 하나와 통신할 수 있다. 예를 들어, 통신부(1410)는 저장부(1420)에 저장된 협업 정보를 클라우드 서버(20)로 전송하거나, 다른 로봇(ex: R1)과 협업하여 임무를 수행하기 위하여 정보를 송수신 할 수 있다. The communication unit (1410) of the second robot (R2) can communicate with at least one of the cloud server (20) and another robot (ex: R1). For example, the communication unit (1410) can transmit collaboration information stored in the storage unit (1420) to the cloud server (20) or transmit and receive information to perform a task in collaboration with another robot (ex: R1).
다음으로 제2 로봇(R2)의 저장부(1420)는, 본 발명과 관련된 다양한 정보를 저장하도록 이루어질 수 있다. 본 발명에서 저장부(1420)에는 제2 로봇(R2)에 대한 정보가 저장될 수 있다.Next, the storage unit (1420) of the second robot (R2) can be configured to store various information related to the present invention. In the present invention, information about the second robot (R2) can be stored in the storage unit (1420).
제2 로봇(R2)에 대한 정보는 매우 다양할 수 있으며, 일 예로서, i)공간(10)에 배치된 제2 로봇(R2)을 식별하기 위한 식별 정보(예를 들어, 일련번호, ID 등), ii) 제2 로봇(R2)에 부여된 임무 정보, iii) 제2 로봇(R2)에 설정된 주행 경로 정보, iv) 제2 로봇(R2))의 위치 정보, v) 제2 로봇(R2)의 상태 정보, vi) 제2 로봇(R2)에 구비된 센서에 의해 센싱된 정보, vii) 제2 로봇(R2)의 동작과 관련된 동작 정보 등이 존재할 수 있다. Information about the second robot (R2) can be very diverse, and as examples, there may be i) identification information (e.g., serial number, ID, etc.) for identifying the second robot (R2) placed in the space (10), ii) mission information assigned to the second robot (R2), iii) driving path information set for the second robot (R2), iv) location information of the second robot (R2), v) status information of the second robot (R2), vi) information sensed by sensors equipped in the second robot (R2), vii) operation information related to the operation of the second robot (R2), etc.
나아가, 제2 로봇(R2)의 저장부(1420)에는, 다른 로봇(제1 로봇)과 협업하여 수행한 임무 또는 작업 관련된 다양한 정보를 포함하는 협업 정보를 포함할 수 있다. Furthermore, the storage unit (1420) of the second robot (R2) may include collaboration information including various information related to tasks or operations performed in collaboration with another robot (the first robot).
제2 로봇(R2)과 관련된 협업 정보는 i) 제2 로봇(R2)에서 출력된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나(예를 들어, 마커에 대한 영상), ii) 제2 로봇(R2)에서 출력된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나에 포함된 정보(식별 정보, 상태 정보 등), iii) 제2 로봇(R2)에서 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나를 출력한 일시 정보, vi) 제2 로봇(R2)에서 센싱된 점멸 신호(1441)를 포함하는 영상, v) 제2 로봇(R2)에서 센싱된 점멸 신호(1441)에 포함된(또는 해석된 정보), vi) 제2 로봇(R2)이 수행한 동작 및 동작 수행 일시 정보 중 적어도 하나를 포함할 수 있다. Collaboration information related to the second robot (R2) may include at least one of i) at least one of the first marker (1441) and the second marker (1442) output from the second robot (R2) (for example, an image for the marker), ii) information included in at least one of the first marker (1441) and the second marker (1442) output from the second robot (R2) (identification information, status information, etc.), iii) information on the time at which at least one of the first marker (1441) and the second marker (1442) was output from the second robot (R2), vi) an image including a blinking signal (1441) sensed by the second robot (R2), v) information included (or interpreted) in the blinking signal (1441) sensed by the second robot (R2), vi) information on an action performed by the second robot (R2) and the time at which the action was performed.
다음으로 제2 로봇(R2)의 주행부(1430)는, 주행과 관련하여 제2 로봇(R2)dl 특정 공간 내를 이동할 수 있는 수단을 제공한다. 보다 구체적으로, 제2 로봇(R2)의 주행부(1430)는 모터 및 복수의 바퀴를 포함하며, 이들이 조합되어, 제2 로봇(R2)를 주행, 방향 전환, 회전시키는 기능을 수행한다. Next, the driving unit (1430) of the second robot (R2) provides a means for the second robot (R2) to move within a specific space in relation to driving. More specifically, the driving unit (1430) of the second robot (R2) includes a motor and a plurality of wheels, which are combined to perform the functions of driving, changing direction, and rotating the second robot (R2).
다음으로 제2 로봇(R2)의 디스플레이부(1440)는, 제2 로봇(R2)의 식별 정보를 포함하는 제1 마커(1341) 및 제2 로봇(R2)의 상태 정보를 포함하는 제2 마커(1342)를 출력함으로써, 제1 로봇(R1)으로 제2 로봇(R2)의 식별 정보 및 상태 정보를 전달하는 역할을 수행할 수 있다. Next, the display unit (1440) of the second robot (R2) can perform the role of transmitting the identification information and status information of the second robot (R2) to the first robot (R1) by outputting the first marker (1341) including the identification information of the second robot (R2) and the second marker (1342) including the status information of the second robot (R2).
제2 로봇(R2)의 디스플레이부(1440)에는, 제1 로봇(R1)의 식별 정보를 포함하는 제1 마크(1341)가 일 영역에 출력되고,, 다른 일 영역에 제2 로봇(R2)의 상태 정보가 변경되는 것에 근거하여 변경되는 제2 마커(1342)가 출력될 수 있다. 한편, 위에서 설명한 마커(1441, 1442)의 용어는 다양하게 명명될 수 있다. 예를 들어, 이러한 마커(1441, 1442)는 QR코드, 바코드, 식별 표지 등 정보를 포함하는 시각적 수단을 지칭하는 용어로 다양하게 명명되는 것이 가능하다. On the display unit (1440) of the second robot (R2), a first mark (1341) including identification information of the first robot (R1) may be output in one area, and a second marker (1342) that changes based on a change in status information of the second robot (R2) may be output in another area. Meanwhile, the terms of the markers (1441, 1442) described above may be variously named. For example, these markers (1441, 1442) may be variously named as terms referring to visual means including information such as QR codes, barcodes, and identification marks.
다음으로, 제2 로봇(R2)의 카메라부(1450)는, 제1 로봇(R1)에서 출력되는 점멸 신호(1331)을 촬영하는 역할을 수행할 수 있다. 카메라부(1450)의 종류는 다양할 수 있으며, 제2 로봇(R2)에 구비되어 특정 화각에 대응되는 영역을 촬영할 수 있다. Next, the camera unit (1450) of the second robot (R2) can perform the role of photographing a blinking signal (1331) output from the first robot (R1). The type of the camera unit (1450) can be various, and it can be equipped in the second robot (R2) to photograph an area corresponding to a specific angle of view.
다음으로, 제2 로봇(R2)의 센싱부(1460)는 제1 로봇(R1)의 출력부(1330)를 통해 출력되는 점멸 신호(1331(도 18 참조), 제어 신호)를 센싱할 수 있도록 이루어질 수 있다. Next, the sensing unit (1460) of the second robot (R2) can be configured to sense a blinking signal (1331 (see FIG. 18), control signal) output through the output unit (1330) of the first robot (R1).
예를 들어 제2 로봇(R2)의 센싱부(1460)는 적외선 수신기, RGB 수신기 중 적어도 하나를 포함하며, 적외선 수신기를 통해 제1 로봇(R1)에서 출력되는 적외선 LED, RGB LED 및 파장 중 적어도 하나를 센싱할 수 있다. For example, the sensing unit (1460) of the second robot (R2) includes at least one of an infrared receiver and an RGB receiver, and can sense at least one of an infrared LED, an RGB LED, and a wavelength output from the first robot (R1) through the infrared receiver.
다음으로, 제2 로봇(R2)의 제어부(1470)는, 제2 로봇(R2)의 전반적인 동작을 제어하도록 이루어질 수 있다. 제2 로봇(R2)의 제어부(1350)는 위에서 살펴본 제1 로봇(R1)의 구성요소들을 통해 입력 또는 출력되는 데이터, 정보 등을 처리하거나 기관에게 적절한 정보 또는 기능을 제공 또는 처리할 수 있다. Next, the control unit (1470) of the second robot (R2) can be configured to control the overall operation of the second robot (R2). The control unit (1350) of the second robot (R2) can process data, information, etc. input or output through the components of the first robot (R1) discussed above, or provide or process appropriate information or functions to the institution.
제2 로봇(R2)의 제어부(1470)는 특정 임무를 수행하기 위하여, 제2 로봇(R2)의 동작을 제어할 수 있다. 예를 들어, 특정 임무가 “푸드 제공 임무”인 경우, 제2 로봇(R2)의 제어부(1470)는 제2 로봇(R2)이 푸드 제공 임무에 포함된 복수의 작업 중 서빙을 위한 주행 작업을 수행하도록 제1 로봇(R1)의 주행부(143)의 동작을 제어할 수 있다. The control unit (1470) of the second robot (R2) can control the operation of the second robot (R2) to perform a specific task. For example, if the specific task is a “food serving task,” the control unit (1470) of the second robot (R2) can control the operation of the driving unit (143) of the first robot (R1) so that the second robot (R2) performs a driving task for serving among the multiple tasks included in the food serving task.
나아가, 제2 로봇(R2)의 제어부(1470)는 제1 로봇(R1)과 협업하여 특정 임무를 수행하기 위하여, 센싱된 점멸 신호(1331, 도 18 참조)에 포함된 제어 명령에 근거하여, 특정 동작을 수행하도록, 제2 로봇(R2)을 제어할 수 있다. Furthermore, the control unit (1470) of the second robot (R2) can control the second robot (R2) to perform a specific operation based on a control command included in a sensed blinking signal (1331, see FIG. 18) in order to perform a specific task in collaboration with the first robot (R1).
한편, 제2 로봇(R2)의 바디부(또는 케이스)는 오브젝트(물품)을 수용할 수 있는 물품 수용함(또는 보관함, 1480)을 포함할 수 있다. 제2 로봇(R2)의 물품 수용함(1480)은 물품 수용함(1480)에 구비된 문(door)의 개폐상태를 변경함으로써, 물품 수용함(1480)에 구비된 문(door)이 열림 상태이거나 닫힘 상태이도록 할 수 있다. 사용자는 물품 수용함(1480)에 구비된 문(door)이 열림 상태이면, 물품 수용함(1480)에 오브젝트(물품)를 수용(보관, 적재, 수납)하거나 하역(물품을 빼내는 행위)를 할 수 있다. Meanwhile, the body (or case) of the second robot (R2) may include an item receiving box (or storage box, 1480) capable of receiving an object (item). The item receiving box (1480) of the second robot (R2) may be configured to have the door of the item receiving box (1480) open or closed by changing the open/closed state of the door provided in the item receiving box (1480). When the door of the item receiving box (1480) is open, the user may receive (store, load, receive) an object (item) in the item receiving box (1480) or unload (take out an item).
이상에서 살펴본 제1 로봇(R1) 및 제2 로봇(R2)의 구성과 함께, 마커, 적외선 및 가시 광선 등과 같은 시각적 수단을 출력 및 센싱하여 네트워크(40) 부재 상태이거나 클라우드 서버(20)의 개입 없이도, 협업 임무를 수행하는 방법에 대해 설명하도록 한다. Together with the configuration of the first robot (R1) and the second robot (R2) discussed above, a method for performing a collaborative task without the absence of a network (40) or the intervention of a cloud server (20) by outputting and sensing visual means such as markers, infrared rays, and visible light will be described.
본 발명에서는, 제1 기능을 수행하는 제1 로봇(R1)에 대해 특정 임무가 할당되고, 제1 로봇(R1)에서 특정 임무와 연관된 제1 작업이 수행되는 과정이 진행될 수 있다(S110, 도 15 참조).In the present invention, a specific task is assigned to a first robot (R1) performing a first function, and a process may be performed in which a first task associated with the specific task is performed in the first robot (R1) (S110, see FIG. 15).
앞서 설명한 것과 같이, 제1 기능은 제1 로봇(R1)에서 특정 작업을 수행할 수 있는 능력을 의미할 수 있다. As explained above, the first function may mean the ability of the first robot (R1) to perform a specific task.
나아가, 제1 작업은 특정 임무와 연관된 복수의 작업 중 제1 로봇(R1)에 의해 단독으로 수행되는 작업으로 이해될 수 있다. 즉, 제1 작업은 제1 기능을 수행하는 제1 로봇(R1)에 의해 수행되는 작업으로 이해될 수 있다. Furthermore, the first task can be understood as a task performed solely by the first robot (R1) among multiple tasks associated with a specific task. In other words, the first task can be understood as a task performed by the first robot (R1) performing the first function.
구체적으로, 푸드(food) 제조와 관련된 기능(제1 기능)을 갖는 푸드(food) 제조 로봇(제1 로봇)과 푸드 배송 기능(제2 기능)을 수행할 수 있는 푸드 배달 로봇(제2 로봇)을 가정하자. Specifically, let us assume a food manufacturing robot (first robot) having a function related to food manufacturing (first function) and a food delivery robot (second robot) capable of performing a food delivery function (second function).
푸드 제조 로봇(제1 로봇)은, 푸드 제공 임무와 관련된 복수의 작업(예를 들어, 푸드 제조 작업, 푸드 포장 작업, 서빙을 위한 주행 작업, 서빙을 위하여 서빙 대상에 접근하는 작업, 서빙을 위해 로봇의 하드웨어를 구동하는 작업의 작업) 중 푸드(food) 제조 기능(제1 기능)과 관련된 작업(푸드 제조 작업, 푸드 포장 작업, 제1 작업)을 수행할 수 있다. A food manufacturing robot (first robot) can perform tasks (food manufacturing task, food packaging task, first task) related to a food manufacturing function (first function) among a plurality of tasks related to a food providing mission (e.g., food manufacturing task, food packaging task, driving task for serving, task of approaching a serving target for serving, task of driving robot hardware for serving).
푸드 배달 로봇(제2 로봇)은, 푸드 제공 임무와 관련된 복수의 작업 중 푸드 배송 기능(제2 기능)과 관련된 작업(서빙을 위한 주행 작업, 서빙을 위하여 서빙 대상에 접근하는 작업, 서빙을 위해 로봇의 하드웨어를 구동하는 작업의 작업)을 수행할 수 있다.제1 로봇에 대한 임무 할당은 서버(20)로부터 수신되는 정보에 근거하여 이루어질 수 있다.A food delivery robot (second robot) can perform tasks related to a food delivery function (second function) among multiple tasks related to a food providing task (a task of driving for serving, a task of approaching a serving target for serving, a task of operating the robot's hardware for serving). Task assignment to the first robot can be made based on information received from a server (20).
다음으로, 본 발명에서는 제1 로봇(R1)에서, 제1 로봇(R1) 주변에 위치한, 제1 기능과 다른 제2 기능을 수행하는 제2 로봇(R2)을 센싱하는 과정이 진행될 수 있다(S120, 도 15 참조). Next, in the present invention, a process of sensing a second robot (R2) located around the first robot (R1) and performing a second function different from the first function can be performed in the first robot (R1) (S120, see FIG. 15).
제2 로봇(R2)은 제1 로봇(R1)과 협업 임무를 수행하기 위하여, 제1 로봇(R1)로봇이 센싱 가능한 형태의 마커 정보(1441, 1442)를 제2 로봇(R2)의 디스플레이부(1440)상에 출력할 수 있다. In order to perform a collaborative task with the first robot (R1), the second robot (R2) can output marker information (1441, 1442) in a form that the first robot (R1) can sense on the display unit (1440) of the second robot (R2).
제1 마커(1441)는 제2 로봇(R2)의 식별 정보를 포함하는 정보일 수 있다. The first marker (1441) may be information including identification information of the second robot (R2).
로봇의 식별 정보는, 로봇 각각을 구분하기 위한 정보로서, 동일한 종류의 로봇이더라도, 서로 다른 식별 정보를 가질 수 있다. 구체적으로, 동일 종류의 주행 로봇이더라도, 제1 주행 로봇과 제2 주행 로봇 각각의 식별 정보는 서로 다를 수 있다. The identification information of the robot is information for distinguishing each robot, and even if they are the same type of robot, they may have different identification information. Specifically, even if they are the same type of driving robot, the identification information of the first driving robot and the second driving robot may be different from each other.
제2 로봇(R2)은 제1 로봇(R1)과 협업을 수행하는 동안, 제2 로봇(R2)의 디스플레이부(1440)에 제1 마커(1441)를 계속 표시함으로써, 제1 로봇(R1)이 제2 로봇(R2)을 계속적으로 인지할 수 있도록 할 수 있다. While the second robot (R2) is performing collaboration with the first robot (R1), the first robot (R1) can continuously recognize the second robot (R2) by continuously displaying the first marker (1441) on the display unit (1440) of the second robot (R2).
이 경우, 제1 로봇(R1)은 제1 마커(1441)를 센싱하는 것을 통해, 제2 로봇(R2)과 협업이 이루어지는 동안, 협업을 수행하는 제2 로봇(R2)을 식별할 수 있다.In this case, the first robot (R1) can identify the second robot (R2) performing collaboration while collaborating with the second robot (R2) by sensing the first marker (1441).
구체적으로, 도 16에 도시된 것과 같이, 제2 로봇(R2)은 제1 로봇(R1)과 협업을 수행하는 동안, 제1 로봇(R1)과의 협업 상태에 따라, 디스플레이부(1440)에 출력되는 제2 마커(1442)의 종류가 변경되더라도, 제1 마커(1441)는 변경하지 않을 수 있다. Specifically, as illustrated in FIG. 16, while the second robot (R2) performs collaboration with the first robot (R1), the type of the second marker (1442) output to the display unit (1440) may change depending on the collaboration status with the first robot (R1), but the first marker (1441) may not change.
제1 로봇(R1)은 이러한 제1 마커(1441)를 센싱하여, 1 마커(1441) 및 제2 마커(1442)를 출력하는 로봇이 어느 로봇인지 또는 현재 협업 임무를 수행하는 로봇이 어느 로봇인지를 구분할 수 있다. The first robot (R1) can sense the first marker (1441) to distinguish which robot outputs the first marker (1441) and the second marker (1442) or which robot is currently performing a collaborative task.
한편, 제2 마커(1442)는 제2 로봇(R2)로봇의 상태와 관련된 다양한 상태 정보를 포함할 수 있다. 구체적으로, 제2 마커(1442)는, 제2 로봇(R2)로봇의 현재 상태와 관련된 정보(ex: 로봇의 위치 정보), 제2 로봇(R2)의 작업 상태와 관련된 정보(ex: 제1 로봇(R1)과 협업 중인 작업의 종류, 제1 로봇(R1)과 협업 중인 작업의 진행 정도 등), 제2 로봇의 서로 다른 동작 상태와 관련된 정보를 포함할 수 있다.Meanwhile, the second marker (1442) may include various status information related to the status of the second robot (R2). Specifically, the second marker (1442) may include information related to the current status of the second robot (R2) (e.g., robot location information), information related to the working status of the second robot (R2) (e.g., type of work being collaborated with the first robot (R1), progress of work being collaborated with the first robot (R1), etc.), and information related to different operation states of the second robot.
즉, 제2 마커(1442)는, 제2 로봇(R2)의, 다양한 상태(예를 들어, 동작 상태) 각각에 대응되는 상태 정보를 포함하는 것으로 이해될 수 있다. That is, the second marker (1442) can be understood as including state information corresponding to each of the various states (e.g., operation states) of the second robot (R2).
본 발명에서는, 제2 로봇(R2)의 위치 상태, 작업 상태, 동작 상태를 모두 통칭하는 용어로, “상태” 또는 “동작 상태”를 사용할 수 있다. 즉, “상태” 또는 “동작 상태”는, 제2 로봇(R2)의 모션 상태를 의미하거나, 제2 로봇(R2)에 할당된 작업, 임무를 의미하거나, 제2 로봇(R2)의 위치를 의미할 수 있다. In the present invention, the term “state” or “operation state” may be used as a general term for the positional state, work state, and operation state of the second robot (R2). That is, the “state” or “operation state” may mean the motion state of the second robot (R2), the work or task assigned to the second robot (R2), or the position of the second robot (R2).
제2 마커(1442)의 종류는 복수일 수 있으며, 복수의 제1 마커(1442) 마다 서로 다른 제2 로봇(R2)의 상태 정보를 포함할 수 있다. 즉, 제2 마커(1442)는, 제2 로봇(R2)의 상태(또는 상태 정보)에 따라 출력되는 마커의 종류가 상이할 수 있다. The types of the second marker (1442) may be plural, and each of the plurality of first markers (1442) may include different status information of the second robot (R2). That is, the types of markers output by the second marker (1442) may be different depending on the status (or status information) of the second robot (R2).
도 17에 도시된 것과 같이, 제2 마커(1442)는 제2 로봇(R2)의 동작 상태에 대응되는 상태 정보를 포함하는 다양한 마커들이 서로 다른 상태 정보에 각각 매칭되어 데이터베이스(제2 로봇(R2)의 저장부(1420) 및 제1 로봇(R1)의 저장부(1320) 중 적어도 하나, 이하, 데이터베이스로 명명)에 존재할 수 있다. 즉, 제1 로봇(R1) 및 제2 로봇(R2)은 제2 마커(1442)와 관련된 동일한 매칭 정보를 공유하고 있을 수 있다. As illustrated in FIG. 17, the second marker (1442) may exist in a database (at least one of the storage unit (1420) of the second robot (R2) and the storage unit (1320) of the first robot (R1), hereinafter referred to as the database) in which various markers including state information corresponding to the operating state of the second robot (R2) are each matched with different state information. That is, the first robot (R1) and the second robot (R2) may share the same matching information related to the second marker (1442).
예를 들어, 도 17에 도시된 것과 같이, 제2 마커(1442)는, i) 제2 로봇(R2)이 배달(또는 배송)임무를 수행할 수 있음을 알리는 상태 정보를 포함(1442a) 하거나, ii) 제2 로봇(R2)의 현재 위치 좌표를 알리는 상태 정보를 포함(1442b)하거나, , iii) 제2 로봇(R2)의 위치를 변경하였음을 알리는 상태 정보를 포함(1442c)하거나, vi) 제2 로봇(R2)에 구비된 보관함(1480)의 문(door)을 오픈하였음을 알리는 상태 정보를 포함(1442d)하거나, v) 제2 로봇(R2)이 현재 배달 임무를 수행 중임을 알리는 상태 정보를 포함(1442e)할 수 있다. For example, as illustrated in FIG. 17, the second marker (1442) may include (1442a) status information indicating that i) the second robot (R2) can perform a delivery (or shipping) mission, ii) status information indicating the current location coordinates of the second robot (R2) (1442b), iii) status information indicating that the location of the second robot (R2) has changed (1442c), vi) status information indicating that the door of a storage unit (1480) equipped in the second robot (R2) has been opened (1442d), or v) status information indicating that the second robot (R2) is currently performing a delivery mission (1442e).
나아가, 데이터베이스에는, 제2 마커(1442)의 생성 및 해석(인코딩(encoding) 및 디코딩(decoding))과 관련된 정보가 저장되어 있을 수 있다. Furthermore, the database may store information related to the creation and interpretation (encoding and decoding) of the second marker (1442).
제2 마커(1442) 생성 및 해석(인코딩 및 디코딩)과 관련된 정보는, 제2 로봇(R2)의 상태 정보를 제2 마커(1442)로 생성(인코딩)하고, 해석(디코딩)하기 위한 기준과 관련된 정보일 수 있다. 예를 들어, 제2 마커(1442) 생성 및 해석(인코딩 및 디코딩)과 관련된 정보는, 제2 로봇(R2)의 상태 정보 및 현재 위치 좌표를 제2 마커로서 어떻게 생성할 것인지에 대한 정보가 포함되어 있을 수 있으며, 이에 근거하여 제2 로봇(R2)의 위치 좌표는 제2 마커(1442)로서 생성될 수 있다. Information related to the generation and interpretation (encoding and decoding) of the second marker (1442) may be information related to a criterion for generating (encoding) and interpreting (decoding) the status information of the second robot (R2) as the second marker (1442). For example, information related to the generation and interpretation (encoding and decoding) of the second marker (1442) may include information on how to generate the status information and current position coordinates of the second robot (R2) as the second marker, and based on this, the position coordinates of the second robot (R2) may be generated as the second marker (1442).
이하에서는, 설명의 편의를 위하여 도 17에 도시된 것과 같이, 제2 로봇(R2)의 상태 정보 각각에 매칭된 복수의 제2 마커(1442)가 존재하는 것을 예로 들어 설명하도록 한다. In the following, for convenience of explanation, as illustrated in Fig. 17, an example will be described in which there are multiple second markers (1442) each matching the status information of the second robot (R2).
한편, 제2 로봇(R2)은, 제2 로봇(R2)의 상태에 매칭되는 제2 마커(1442)를, 데이터베이스(제2 로봇(R2)의 저장부(1420))에서 확인하고, 확인된 제2 마커(1442)를 디스플레이부(1440)에 출력할 수 있다.Meanwhile, the second robot (R2) can check the second marker (1442) matching the status of the second robot (R2) in the database (storage unit (1420) of the second robot (R2)) and output the checked second marker (1442) on the display unit (1440).
도 16에 도시된 것과 같이, 제2 로봇(R2)은 디스플레이부(1440)의 제1 영역에는 제1 마커(1441)을 출력하고, 제1 영역과 구분되는 제2 영역에는 제2 마커(1442)를 출력할 수 있다. As illustrated in FIG. 16, the second robot (R2) can output a first marker (1441) in the first area of the display unit (1440) and output a second marker (1442) in the second area that is distinct from the first area.
제2 로봇(R2)은, 제2 로봇(R2)의 상태가 변경되는 것에 근거하여, 디스플레이부(1440)의 제2 영역에 출력되는 제2 마커(1442)를 변경할 수 있다. 즉, 제2 로봇(R2)은, 동작 상태가 변경되면, 변경된 동작 상태에 대응되는 상태 정보를 포함하는 제2 마커(1442)를 디스플레이부(1440)에 출력할 수 있다. The second robot (R2) can change the second marker (1442) output to the second area of the display unit (1440) based on the change in the state of the second robot (R2). That is, when the operation state of the second robot (R2) is changed, the second robot (R2) can output the second marker (1442) including state information corresponding to the changed operation state to the display unit (1440).
나아가, 제2 로봇(R2)은, 제2 영역에 출력되는 제2 마커(1442)를 변경하더라도, 협업 임무가 수행되는 동안(제2 작업이 수행되는 동안), 제1 영역에 출력되는 제1 마커(1441)는 변경하지 않을 수 있다. Furthermore, the second robot (R2) may not change the first marker (1441) output to the first area while the collaborative task is being performed (while the second task is being performed), even if the second marker (1442) output to the second area is changed.
제2 로봇(R2)은, 제1 로봇(300)이 제2 로봇(R2)을 식별 가능하도록, 제1 로봇(R1)과 협업 임무 또는 협업 작업을 수행하는 동안, 제2 로봇의 디스플레이부(1440) 상 동일한 제1 마커(1441)를 출력할 수 있다. The second robot (R2) can output the same first marker (1441) on the display unit (1440) of the second robot while performing a collaborative task or collaborative work with the first robot (R1) so that the first robot (300) can identify the second robot (R2).
한편, 위에서 설명한 마커(1441, 1442)의 용어는 다양하게 명명될 수 있다. 예를 들어, 이러한 마커(1441, 1442)는 QR코드, 바코드, 식별 표지 등 정보를 포함하는 시각적 수단을 지칭하는 용어로 다양하게 명명되는 것이 가능하다. Meanwhile, the terms of the markers (1441, 1442) described above may be variously named. For example, these markers (1441, 1442) may be variously named as terms referring to visual means containing information such as QR codes, barcodes, and identification marks.
한편, 본 발명에 따른 로봇 협업 방법은, 제1 로봇(R1)에서, 제1 로봇(R1)에 구비된 센서를 이용하여, 제2 로봇(R2)에 출력된 제1 마커(1441) 및 제2 마커(1442)를 센싱하는 과정이 진행될 수 있다.Meanwhile, the robot collaboration method according to the present invention can proceed with a process of sensing a first marker (1441) and a second marker (1442) output to a second robot (R2) using a sensor equipped in the first robot (R1).
제1 로봇(R1)은 제1 마커(1441) 및 제2 마커(1441)를 센싱할 수 있도록, 제1 마커(1441) 및 제2 마커(1442)의 종류에 대응되는 센서를 구비하고 있을 수 있다. 예를 들어, 제1 마커(1441) 및 제2 마커(1442)가 QR 코드이면, 제1 로봇(R1)은 QR코드를 센싱할 수 있는 카메라 또는 QR 코드 리더기를 구비하고, 제1 마커(1441) 및 제2 마커(1442)가 바코드 이면 제1 로봇(R1)은 바코드를 센싱할 수 있는 카메라 또는 바코드 리더기를 구비할 수 있다. 다만, 이하에서는 제1 로봇(R1)에 구비된 센서의 종류를 구분하지 않고, 제1 로봇(R1)의 센싱부(1340) 또는 제1 로봇(R1)에 구비된 센서(1340)로 명명하여 설명하도록 한다. The first robot (R1) may be equipped with sensors corresponding to the types of the first marker (1441) and the second marker (1442) so as to sense the first marker (1441) and the second marker (1441). For example, if the first marker (1441) and the second marker (1442) are QR codes, the first robot (R1) may be equipped with a camera or a QR code reader capable of sensing the QR code, and if the first marker (1441) and the second marker (1442) are barcodes, the first robot (R1) may be equipped with a camera or a barcode reader capable of sensing the barcode. However, in the following description, the types of sensors equipped in the first robot (R1) will not be distinguished, and will be referred to as the sensing unit (1340) of the first robot (R1) or the sensor (1340) equipped in the first robot (R1).
한편, 제1 로봇(R1)은, 제1 로봇(R1)에 구비된 센서부(1340)가 제2 로봇(R2)과의 협업 임무 상태에 따라, 제1 마커(1441) 및 제2 마커(1442)를 센싱할 수 있도록, 제1 로봇(R1)에 구비된 센서부(1340)의 위치 및 방향 중 적어도 하나를 제어할 수 있다. Meanwhile, the first robot (R1) can control at least one of the position and direction of the sensor unit (1340) equipped in the first robot (R1) so that the sensor unit (1340) equipped in the first robot (R1) can sense the first marker (1441) and the second marker (1442) according to the collaboration task status with the second robot (R2).
구체적으로, 제1 로봇(R1)은, 제2 로봇(R2)과의 협업 임무를 수행하고 있지 않는 경우에는, 협업 임무를 수행할 수 있음을 알리는 상태 정보를 포함하는 제2 마커(1441)를 인식할 때 까지, 제1 로봇(R1)에 구비된 센서부(1340)의 움직임 및 위치를 자유롭게 제어할 수 있다. Specifically, when the first robot (R1) is not performing a collaborative task with the second robot (R2), the first robot (R1) can freely control the movement and position of the sensor unit (1340) equipped in the first robot (R1) until it recognizes a second marker (1441) that includes status information indicating that it can perform a collaborative task.
나아가, 제1 로봇(R1)은, 제2 로봇(R2)과의 협업 임무를 수행하고 있는 경우에는, 제2 로봇(R2)의 위치 정보에 근거하여, 제1 로봇(R1)에 구비된 센서부(1340)가 제2 로봇(R2)의 디스플레이부(1440)를 센싱할 수 있도록, 제1 로봇(R1)에 구비된 센서부(1340)의 움직임(예를 들어, 방향 및 위치 중 적어도 하나)를 제어할 수 있다. 예를 들어, 제1 로봇(R1)은, 제2 로봇(R2)의 움직임 또는 제2 로봇(R2)의 디스플레이부(1440) 움직임에 대응하도록, 제1 로봇(R1)에 구비된 센서부(1340)의 움직임을 제어할 수 있다. Furthermore, when the first robot (R1) is performing a collaborative task with the second robot (R2), the sensor unit (1340) provided in the first robot (R1) can control the movement (for example, at least one of the direction and the position) of the sensor unit (1340) provided in the first robot (R1) so that the sensor unit (1340) provided in the first robot (R1) can sense the display unit (1440) of the second robot (R2) based on the position information of the second robot (R2). For example, the first robot (R1) can control the movement of the sensor unit (1340) provided in the first robot (R1) so as to correspond to the movement of the second robot (R2) or the movement of the display unit (1440) of the second robot (R2).
한편, 본 발명에서는 제1 로봇(R1)에서 제2 로봇(R2)이 센싱되는 것에 근거하여, 제1 로봇(R1)과 특정 임무에 대하여 협업을 수행할 로봇으로서 제2 로봇(R2)이 특정되는 과정이 진행될 수 있다(S130, 도 15 참조). Meanwhile, in the present invention, based on the sensing of the second robot (R2) by the first robot (R1), a process may be performed in which the second robot (R2) is specified as a robot to perform collaboration with the first robot (R1) for a specific task (S130, see FIG. 15).
제1 로봇(R1)에서 제2 로봇(R2)을 협업을 수행할 로봇으로서 특정하는 것은, 특정 임무와 관련된 복수의 작업 중 적어도 하나를 분담하여 수행하기 위하여, 특정된 제2 로봇(R2)과 서로의 상태 정보 및 제어 명령을 공유할 수 있도록 연동하는 과정으로 이해할 수 있다. Specifying the second robot (R2) as a robot to perform collaboration in the first robot (R1) can be understood as a process of linking with the specified second robot (R2) so that they can share status information and control commands with each other in order to perform at least one of a plurality of tasks related to a specific task.
제1 로봇(R1)은, 제2 로봇(R2)을 특정하기 위하여, 제2 로봇(R2)의 디스플레이부(1440)에 출력된 제1 마커(1441)를 센싱하여, 제1 로봇(R1)과의 협업 가능 여부를 확인할 수 있다. The first robot (R1) can sense the first marker (1441) output on the display unit (1440) of the second robot (R2) to identify the second robot (R2) and check whether collaboration with the first robot (R1) is possible.
제1 로봇(R1)은, 제1 로봇(R1)에 구비된 센서부(1340)를 통해 제2 로봇(R2)의 디스플레이부(1440)에 출력된 제1 마커(1441) 및 제2 마커(1442)를 센싱하는 경우, 협업 가능 여부를 확인하기 위하여, 제1 마커(1441) 및 제2 마커(1442)에 포함된 정보를 확인할 수 있다. When the first robot (R1) senses the first marker (1441) and the second marker (1442) output on the display unit (1440) of the second robot (R2) through the sensor unit (1340) equipped on the first robot (R1), the first robot (R1) can check the information included in the first marker (1441) and the second marker (1442) to determine whether collaboration is possible.
먼저, 제1 로봇(R1)은 제1 로봇(R1)에 구비된 센싱부(1340)를 통해, 제1 마커(1441)가 인식되는 것에 근거하여, 제2 로봇(R2)을 협업 대상 로봇으로서 특정할 수 있다. First, the first robot (R1) can specify the second robot (R2) as a collaboration target robot based on the recognition of the first marker (1441) through the sensing unit (1340) equipped in the first robot (R1).
구체적으로, 제1 로봇(R1)은, 제1 마커(1441)에 포함된 제2 로봇(R2)의 식별 정보를 확인하여, 제2 로봇(R2)이 협업 임무를 수행할 수 있는 로봇인지를 확인할 수 있다. Specifically, the first robot (R1) can check the identification information of the second robot (R2) included in the first marker (1441) to determine whether the second robot (R2) is a robot that can perform a collaborative task.
예를 들어, 제1 로봇(R1)에게 할당된 특정 임무가 “푸드 제공 임무”인 경우를 가정하자. 제1 로봇(R1)은, 제1 마커(1441)에 포함된 식별 정보에 근거하여, 제2 로봇(R2)이 배송 기능을 수행하는 로봇인지 아니면 청소 기능을 수행하는 로봇인지를 확인할 수 있다. For example, let's assume that a specific task assigned to the first robot (R1) is a "food serving task." The first robot (R1) can determine whether the second robot (R2) is a robot performing a delivery function or a robot performing a cleaning function based on the identification information included in the first marker (1441).
제1 로봇(R1)은, 제1 마커(1441)에 포함된 제2 로봇(R2)의 식별 정보에 근거하여, 제2 로봇(R2)과의 협업을 수행할지(즉, 협업 대상 로봇으로서 특정할지), 나아가 제2 로봇(R2)에 제1 로봇(R1)의 상태 정보(예를 들어, 협업 요청 정보) 및 제2 로봇(R2)에 대한 제어 명령 중 적어도 하나를 전달할지를 결정할 수 있다. The first robot (R1) can determine whether to perform collaboration with the second robot (R2) (i.e., specify it as a collaboration target robot) based on the identification information of the second robot (R2) included in the first marker (1441), and further, whether to transmit at least one of the status information of the first robot (R1) (e.g., collaboration request information) and the control command for the second robot (R2) to the second robot (R2).
나아가, 제1 로봇(R1)은, 판단 결과에 근거하여, 제1 로봇(R1)의 출력부(1330)에 제1 로봇(R1)의 상태 정보 및 제2 로봇(R2)에 대한 제어 명령 중 적어도 하나를 출력할지를 결정할 수 있다. Furthermore, based on the judgment result, the first robot (R1) can decide whether to output at least one of the status information of the first robot (R1) and the control command for the second robot (R2) to the output unit (1330) of the first robot (R1).
제1 로봇(R1)은, 제1 마커(1441)에 포함된 제2 로봇(R2)의 식별 정보에 대한 확인 결과, 제2 로봇(R2)이 협업 임무와 관련된 로봇이 아닌 경우에는, 협업 가능한 다른 제2 로봇(R2)을 인식하기 위하여, 제1 로봇(R1)에 구비된 센서부(1340)의 움직임을 제어할 수 있다. If the second robot (R2) is not a robot related to the collaborative task as a result of verifying the identification information of the second robot (R2) included in the first marker (1441), the first robot (R1) can control the movement of the sensor unit (1340) equipped in the first robot (R1) to recognize another second robot (R2) with which collaboration is possible.
반면에, 제1 로봇(R1)은, 제1 마커(1441)에 포함된 제2 로봇(R2)의 식별 정보에 대한 확인 결과, 제2 로봇(R2)이 협업 임무와 관련된 로봇인 경우에는, 제2 로봇(R2)을 협업 대상 로봇으로서 특정할 수 있다. On the other hand, if the second robot (R2) is a robot related to a collaborative task as a result of verifying the identification information of the second robot (R2) included in the first marker (1441), the first robot (R1) can specify the second robot (R2) as a collaborative target robot.
나아가, 제1 로봇(R1)은, 협업 대상 로봇으로 특정된 제2 로봇(R2)의 상태 정보에 근거하여, 협업 대상 로봇과의 협업 임무를 진행할지 여부를 결정할 수 있다. Furthermore, the first robot (R1) can determine whether to proceed with a collaboration task with the collaboration target robot based on the status information of the second robot (R2) specified as the collaboration target robot.
보다 구체적으로, 제1 로봇(R1)은 제2 마커(1442)에 포함된 제2 로봇(R2)의 상태 정보를 확인하여, 제1 로봇(R1)의 출력부(1330)에 제1 로봇(R1)의 상태 정보 및 제2 로봇(R2)에 대한 제어 명령 중 적어도 하나를 출력할지를 결정할 수 있다. More specifically, the first robot (R1) can check the status information of the second robot (R2) included in the second marker (1442) and determine whether to output at least one of the status information of the first robot (R1) and a control command for the second robot (R2) to the output unit (1330) of the first robot (R1).
즉, 제1 로봇(R1)에 구비된 센싱부(1340)를 통해 제2 마커(1442)를 인식하는 것에 근거하여, 제2 로봇(R2)의 현재 동작 상태를 식별할 수 있다. That is, the current operating status of the second robot (R2) can be identified based on recognizing the second marker (1442) through the sensing unit (1340) equipped in the first robot (R1).
한편, 앞서 설명한 것과 같이, 제1 로봇(R1)은, 제2 마커(1442)에 매칭된 상태 정보와 관련된 매칭 정보를 제2 로봇(R2)과 공유하고 있을 수 있다. 제1 로봇(R1)은 제2 로봇(R2)과 공유하고 있는 매칭 정보에 근거하여, 센싱된 제2 마커(1442)에 매칭된 정보가 무엇인지 확인할 수 있다. Meanwhile, as described above, the first robot (R1) may share matching information related to the status information matched to the second marker (1442) with the second robot (R2). The first robot (R1) may determine what information is matched to the sensed second marker (1442) based on the matching information shared with the second robot (R2).
나아가. 제1 로봇(R1)은, 제2 마커(1442)의 생성 및 해석과 관련된 정보를 제2 로봇(R2)과 공유하고 있을 수 있다. 제1 로봇(R1)은 제2 로봇(R2)과 공유하고 있는 제2 마커(1442)의 생성 및 해석과 관련된 정보에 근거하여, 센싱된 제2 마커(1442)에 매칭된 정보를 해석(디코딩) 할 수 있다.Furthermore, the first robot (R1) may share information related to the generation and interpretation of the second marker (1442) with the second robot (R2). The first robot (R1) may interpret (decode) information matching the sensed second marker (1442) based on the information related to the generation and interpretation of the second marker (1442) shared with the second robot (R2).
제1 로봇(R1)은, 제2 마커(1442)에 포함된 제2 로봇(R2)의 상태 정보에 근거하여, 제2 로봇(R2)이 협업 임무를 수행할 수 있는 상태라고 판단되면, 제2 로봇(R2)과의 협업 임무를 시도할 수 있다. The first robot (R1) may attempt a collaborative task with the second robot (R2) if it is determined that the second robot (R2) is capable of performing a collaborative task based on the status information of the second robot (R2) included in the second marker (1442).
구체적으로, 제1 로봇(R1)은, 제2 로봇(R2)이 협업 가능한 상태임을 알리는 상태 정보(예를 들어, 배달 임무 수행 가능함을 알리는 상태 정보, 1442a, 도 17 참조)가 포함되어 있는 경우에는, 제1 로봇(R1)의 출력부(1330)에 제1 로봇(R1)의 상태 정보 및 제2 로봇(R2)에 대한 제어 명령 중 적어도 하나를 출력할 수 있다. Specifically, if the first robot (R1) includes status information indicating that the second robot (R2) is in a collaborative state (e.g., status information indicating that a delivery mission can be performed, 1442a, see FIG. 17), the first robot (R1) may output at least one of the status information of the first robot (R1) and a control command for the second robot (R2) to the output unit (1330) of the first robot (R1).
반면에, 제1 로봇(R1)은, 제2 마커(1442)에 포함된 제2 로봇(R2)의 상태 정보에 근거하여, 제2 로봇(R2)이 협업 임무를 수행할 수 없는 상태라고 판단되면, 다른 로봇을 협업 대상 로봇으로서 특정할 수 있다. On the other hand, if the first robot (R1) determines that the second robot (R2) is unable to perform the collaboration task based on the status information of the second robot (R2) included in the second marker (1442), the first robot (R1) can specify another robot as the collaboration target robot.
구체적으로, 제1 로봇(R1)은, 제2 마커(1442)에 제2 로봇(R2)이 협업 가능한 상태가 아님을 알리는 상태 정보(예를 들어, 배달 임무 수행 중임을 알리는 상태 정보, 1442e, 도 17 참조)가 포함되어 있는 경우에는, 협업 가능한 다른 제2 로봇(R2)을 인식하기 위하여, 제1 로봇(R1)에 구비된 센서부(1340)의 움직임을 제어할 수 있다. Specifically, if the second marker (1442) includes status information indicating that the second robot (R2) is not in a state where collaboration is possible (e.g., status information indicating that a delivery mission is being performed, 1442e, see FIG. 17), the first robot (R1) can control the movement of the sensor unit (1340) equipped in the first robot (R1) to recognize another second robot (R2) that is capable of collaboration.
이처럼, 제1 로봇(R1) 및 제2 로봇(R2)은 제1 마커(1441) 및 제2 마커(1442)를 이용하여, 오프라인 상황에서도 협업 임무 수행을 위한 데이터 통신을 시도할 수 있다. 이하에서는, 제1 로봇(R1) 및 제2 로봇(R2)가 오프라인 상황에서 협업 임무를 수행하기 위한 구체적인 방법에 대해 계속해서 설명하도록 한다. In this way, the first robot (R1) and the second robot (R2) can attempt data communication for performing a collaborative task even in an offline situation by using the first marker (1441) and the second marker (1442). Hereinafter, a specific method for performing a collaborative task in an offline situation by the first robot (R1) and the second robot (R2) will be continuously described.
다음으로, 본 발명에서는 제1 로봇(R1) 및 제2 로봇(R2) 간의 데이터 통신에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2)들에 의해서, 특정 임무와 관련된 제2 작업이 수행되는 과정이 진행될 수 있다(S140, 도 15 참조).Next, in the present invention, a process can be performed in which a second task related to a specific task is performed by the first robot (R1) and the second robot (R2) based on data communication between the first robot (R1) and the second robot (R2) (S140, see FIG. 15).
본 발명에서 설명되는 “제2 작업”은, 특정 임무와 관련된 복수의 작업 중, 제1 로봇(R1) 및 제2 로봇(R2)이 데이터 통신을 통해, 협동하면서 수행되는 작업(또는 작업들)으로 이해될 수 있다. 예를 들어, 특정 임무가 “푸드 제공 임무”인 경우를 가정하자. 제1 로봇(R1)이 제조한 푸드를 제2 로봇(R2)에게 전달하기 위하여, 제1 로봇(R1) 및 제2 로봇(R2)이 데이터 통신을 수행하면서 위치 및 자세를 변경하는 작업이 제2 작업일 수 있다. The “second task” described in the present invention may be understood as a task (or tasks) performed by the first robot (R1) and the second robot (R2) through data communication in cooperation among a plurality of tasks related to a specific task. For example, let’s assume that the specific task is a “food providing task.” The second task may be a task in which the first robot (R1) and the second robot (R2) change their positions and postures while performing data communication in order to deliver food manufactured by the first robot (R1) to the second robot (R2).
예를 들어, 특정 임무가 “푸드 제공 임무”라고 가정하자. 제2 작업은, 푸드 배달 로봇(제2 로봇)이 푸드를 배달할 수 있도록, 푸드 제조 로봇(제1 로봇)에서 제조된 푸드를 푸드 배달 로봇(제2 로봇)으로 전달하는 작업일 수 있다. For example, let's assume that a specific task is a "food delivery task." A second task may be to deliver food manufactured by a food manufacturing robot (a first robot) to a food delivery robot (a second robot) so that the food delivery robot (a second robot) can deliver the food.
제1 로봇(R1)은, 제2 로봇(R2)을 협업 대상 로봇으로 특정한 것에 근거하여, 제2 로봇(R2)과 제2 작업을 수행하기 위한 데이터 통신을 행할 수 있다. The first robot (R1) can perform data communication with the second robot (R2) to perform a second task based on specifying the second robot (R2) as a collaborative target robot.
제1 로봇(R1) 및 제2 로봇(R2) 간의 데이터 통신은, 제1 로봇(R1)의 출력부(1330) 및 센싱부(1340)와, 제2 로봇(R2)의 디스플레이부(1440), 센싱부(1460)을 이용하여 이루어질 수 있다. Data communication between the first robot (R1) and the second robot (R2) can be achieved using the output unit (1330) and sensing unit (1340) of the first robot (R1) and the display unit (1440) and sensing unit (1460) of the second robot (R2).
제1 로봇(R1) 및 제2 로봇(R2)은, 협업 상대 로봇에게 전달하고자 하는 정보에 대응되는 시각적 정보(점멸 신호 또는 마커)를 각각의 출력부(1330) 및 디스플레이부(1440)에 출력할 수 있다. The first robot (R1) and the second robot (R2) can output visual information (blinking signals or markers) corresponding to information to be transmitted to the collaborative robot to their respective output units (1330) and display units (1440).
나아가, 제1 로봇(R1) 및 제2 로봇(R2)은, 각각에 구비된 센싱부(1340, 1460)을 이용하여, 협업 상대 로봇에서 출력한 시각적 정보(점멸 신호 또는 마커)를 센싱할 수 있다.Furthermore, the first robot (R1) and the second robot (R2) can sense visual information (blinking signal or marker) output from the collaborative robot using the sensing units (1340, 1460) provided in each.
먼저, 제1 로봇(R1)은, 협업 대상 로봇으로 특정된 제2 로봇(R2)에게, 협업 대상 로봇으로 특정된 사실을 전달하기 위하여, 제1 로봇(R1)에 구비된 출력부(1330)를 통해 제어 신호를 출력할 수 있다. First, the first robot (R1) can output a control signal through an output unit (1330) provided in the first robot (R1) to convey the fact that the second robot (R2), which is specified as a collaboration target robot, has been specified as a collaboration target robot.
제1 로봇(R1)은, 제2 작업과 관련하여 제2 로봇(R2)의 특정 동작을 제어하기 위한 제어 신호를, 제1 로봇(R1)에 구비된 출력부(1340)를 통하여 출력할 수 있다. The first robot (R1) can output a control signal for controlling a specific operation of the second robot (R2) in relation to the second task through an output unit (1340) provided in the first robot (R1).
앞서 살펴본 것과 같이, 제1 로봇(R1)의 출력부(1330)는 복수의 광 출력부로 이루어질 수 있다. 이러한 복수의 광 출력부는 적외선 LED 모듈, RGB LED 모듈 중 적어도 하나를 포함할 수 있다. As previously discussed, the output unit (1330) of the first robot (R1) may be composed of a plurality of light output units. These plurality of light output units may include at least one of an infrared LED module and an RGB LED module.
제1 로봇(R1)은, 제1 로봇(R1)의 출력부(1330)를 통해, 제2 작업을 수행하기 위하여, 점멸 신호(1341)를 출력할 수 있다. The first robot (R1) can output a blinking signal (1341) through the output unit (1330) of the first robot (R1) to perform the second task.
본 발명에서 설명되는 점멸 신호(1341)은, 제2 로봇(R2)의 특정 동작을 명령하는 제어 명령에 대응되는 제어 신호, 제1 로봇(R1)의 상태 정보에 대응되는 상태 신호 중 적어도 하나를 포함하는 것으로 이해될 수 있다. 즉, 점멸 신호(1341)는, 제1 로봇(R1)이 제2 로봇(R2)으로 전달하고자 하는 정보(예를 들어, 제어 명령 정보, 제2 로봇이 협업 대상 임무로서 특정되었음을 알리는 정보 등)에 대응되는 신호로 이해될 수 있다. The blinking signal (1341) described in the present invention may be understood as including at least one of a control signal corresponding to a control command that commands a specific operation of the second robot (R2) and a status signal corresponding to status information of the first robot (R1). That is, the blinking signal (1341) may be understood as a signal corresponding to information that the first robot (R1) wishes to transmit to the second robot (R2) (e.g., control command information, information indicating that the second robot has been specified as a collaboration target task, etc.).
이러한 점멸 신호(1341)는, 제1 로봇(R1)의 출력부(1330)에 포함된 복수의 광 출력부가 점등 또는 소등되어 생성되는 정보로, i) 광 출력부 점등 상태(복수의 광 중 적어도 일부의 광 출력부는 점등되고 다른 일부의 광 출력부는 소등되어 있는 상태), ii) 광 출력부 점멸 상태(복수의 광 출력부 중 특정 광 출력부가 일정 주기, 일정 시간을 간격으로 점등 및 소등을 반복하는 상태), iii) 펄스(pulse, 광의 전압이나 전류 또는 파동) 중 적어도 하나를 이용하여 생성될 수 있다. This blinking signal (1341) is information generated by turning on or off a plurality of light output units included in the output unit (1330) of the first robot (R1), and can be generated by using at least one of i) a light output unit lighting state (a state in which at least some of the light output units among the plurality of lights are lit and other light output units are off), ii) a light output unit blinking state (a state in which a specific light output unit among the plurality of light output units is repeatedly lit and off at regular intervals, for a regular period of time), and iii) a pulse (voltage or current or wave of light).
점멸 신호는, 제1 로봇(R1)이 제2 로봇(R2)과 제2 작업 나아가 협업 임무 전체 프로세스를 수행하는 동안, 제1 로봇(R1)의 출력부(1330)를 통해 출력됨으로써, 제2 로봇(R2)이 제1 로봇(R1)의 제어 명령에 따라 특정 동작을 수행하도록 할 수 있다. The flashing signal can be output through the output section (1330) of the first robot (R1) while the first robot (R1) performs the entire process of a second task or collaborative task with the second robot (R2), thereby causing the second robot (R2) to perform a specific action according to the control command of the first robot (R1).
특정 동작은, 다양하게 존재할 수 있다. 특정 임무, 제2 로봇(R2)의 종류, 제2 로봇(R2)의 현재 상태 등에 근거하여 다양하게 특정될 수 있다. 예를 들어, 특정 동작은, 제2 로봇(R2)의 위치를 변경하는 동작, 제2 로봇(R2)의 자세를 변경하는 동작 및 제2 로봇(R2)에 구비된 물품 수용함(1480)의 개폐상태를 변경하는 동작 중 적어도 하나를 포함하는 할 수 있다. The specific action may exist in various ways. It may be specified in various ways based on a specific task, the type of the second robot (R2), the current status of the second robot (R2), etc. For example, the specific action may include at least one of an action of changing the position of the second robot (R2), an action of changing the posture of the second robot (R2), and an action of changing the open/closed state of an item storage box (1480) equipped on the second robot (R2).
도 18에 도시된 것과 같이, 제1 로봇(R1)의 출력부(1330)에는 제2 로봇(R2)에 대한 제어 명령에 따라, 서로 다른 점멸 신호(1331)가 출력될 수 있다. As illustrated in Fig. 18, different blinking signals (1331) can be output from the output section (1330) of the first robot (R1) according to a control command for the second robot (R2).
점멸 신호(1331)의 종류는 복수일 수 있으며, 복수의 점멸 신호(1331) 마다 서로 다른 제1 로봇(R1)의 상태 정보를 포함하거나, 서로 다른 제2 로봇(R2)에 대한 제어 명령을 포함할 수 있다. 즉, 점멸 신호(1331)는, 제1 로봇(R1)의 상태 또는 제2 로봇(R2)에 대한 제어 명령에 따라 종류가 상이할 수 있다. There may be multiple types of flashing signals (1331), and each of the multiple flashing signals (1331) may include different status information of the first robot (R1) or different control commands for the second robot (R2). That is, the flashing signals (1331) may have different types depending on the status of the first robot (R1) or the control commands for the second robot (R2).
도 19에 도시된 것과 같이, 점멸 신호(1331)는 제1 로봇(R1)의 상태(또는 상태 정보) 또는 제2 로봇(R2)에 대한 제어 명령에 대응되는 점멸 신호가, 제1 로봇(R1)의 상태(또는 상태 정보) 또는 제2 로봇(R2)에 대한 제어 명령에 매칭되어 매칭 정보로서 존재할 수 있다. As illustrated in FIG. 19, a blinking signal (1331) may exist as matching information in which a blinking signal corresponding to a state (or state information) of the first robot (R1) or a control command for the second robot (R2) is matched to a state (or state information) of the first robot (R1) or a control command for the second robot (R2).
이러한, 점멸 신호(1331)에 대한 매칭 정보는, 데이터베이스(제2 로봇(R2)의 저장부(1420) 및 제1 로봇(R1)의 저장부(1320), 이하, 데이터베이스로 명명)에 존재할 수 있다. Such matching information for the blinking signal (1331) may exist in a database (storage unit (1420) of the second robot (R2) and storage unit (1320) of the first robot (R1), hereinafter referred to as the database).
일 예로, 도 19에 도시된 것과 같이, 점멸 신호(1331)는, 제1 점멸 신호(1710)를 포함하고, 제1 점멸 신호(191)에는 제2 로봇(R2)에게 위치 좌표를 요청하는 제어 명령(1331a)이 매칭되어 있을 수 있다. 이 때, 제1 점멸 신호(1710)는, 복수의 광 출력부(1900) 중 제2 광 출력부(1900b), 제3 광 출력부 (1900c) 및 제5 광 출력부(1900e)는 점등되고 다른 광 출력부(1900a, 1900d, 1900f)는 소등되는 점멸 신호(1331a)일 수 있다. For example, as illustrated in FIG. 19, the blinking signal (1331) may include a first blinking signal (1710), and the first blinking signal (191) may be matched with a control command (1331a) requesting position coordinates from the second robot (R2). At this time, the first blinking signal (1710) may be a blinking signal (1331a) that turns on the second light output unit (1900b), the third light output unit (1900c), and the fifth light output unit (1900e) among the plurality of light output units (1900) and turns off the other light output units (1900a, 1900d, 1900f).
다른 예로, i) 제2 점멸 신호(1920)에는 제2 로봇(R2)의 위치 변경을 요청하는 제어 명령(예를 들어, “(30, 25, 12) 좌표로 위치를 변경하세요”)이 매칭되어 있고, ii) 제3 점멸 신호(1930)에는 제1로봇(R1)의 회전을 요청하는 제어 명령(예를 들어, “시계 방향으로 30˚ 회전하세요”)이 매칭되어 있고, iii) 제4 점멸 신호(1940)에는 제2 로봇(R2)의 보관함 문(door)를 열림 상태로 제어하는 제어 명령(예를 들어, “보관함 문을 오픈하세요”)이 매칭되어 있으며, vi) 제5 점멸 신호(1950)에는 제1 로봇(R1)의 상태 정보(예를 들어, “푸드(food) 제조 작업 완료”)가 매칭되어 있고, iii) 제6 점멸 신호(1960)에는 제2 로봇(R2)에게 배송을 요청하는 제어 명령(예를 들어, “314번 테이블로 배달하세요”)가 매칭되어 있을 수 있다. As another example, i) a control command requesting a change in the position of the second robot (R2) (e.g., “Change the position to coordinates (30, 25, 12)”) is matched to the second flashing signal (1920), ii) a control command requesting a rotation of the first robot (R1) (e.g., “Rotate 30˚ clockwise”) is matched to the third flashing signal (1930), iii) a control command controlling the storage door of the second robot (R2) to be open (e.g., “Open the storage door”) is matched to the fourth flashing signal (1940), vi) status information of the first robot (R1) (e.g., “Food manufacturing task completed”) is matched to the fifth flashing signal (1950), and iii) a control command requesting delivery to the second robot (R2) (e.g., “314”) is matched to the sixth flashing signal (1960). “Deliver to table” may be matched.
즉, 제1 로봇(R1) 및 제2 로봇(R2)은, 제2 마커(1442)와 관련된 매칭 정 및 점멸 신호(1331)와 관련된 매칭 정보를 공유하고 있을 수 있다. That is, the first robot (R1) and the second robot (R2) may share matching information related to the matching signal and blinking signal (1331) related to the second marker (1442).
나아가, 제1 로봇(R1) 및 제2 로봇(R2)은, 점멸 신호(1331) 생성 및 해석(인코딩 및 디코딩)과 관련된 정보를 공유하고 있을 수 있다. Furthermore, the first robot (R1) and the second robot (R2) may share information related to the generation and interpretation (encoding and decoding) of the blink signal (1331).
점멸 신호(1331) 생성 및 해석(인코딩 및 디코딩)과 관련된 정보는, 제1 로봇(R1)의 상태 정보 및 제2 로봇(R2)에 대한 제어 명령에 대응되는 점멸 신호(1331)를 생성(인코딩)하고, 해석(디코딩)하기 위한 기준과 관련된 정보일 수 있다. Information related to generation and interpretation (encoding and decoding) of a flashing signal (1331) may be information related to a criterion for generating (encoding) and interpreting (decoding) a flashing signal (1331) corresponding to status information of a first robot (R1) and a control command for a second robot (R2).
예를 들어, 점멸 신호(1331) 생성 및 해석과 관련된 정보는, 제2 로봇(R2)로봇을 특정 좌표로 이동시키기 위하여, 특정 좌표로의 이동을 요청하는 제어 명령을 점멸 신호로서 어떻게 생성할 것인지에 대한 정보가 포함되어 있을 수 있으며, 이에 근거하여 제2 로봇(R2)의 위치 좌표는 제2 마커(1442)로서 생성될 수 있다. For example, information related to the generation and interpretation of a blinking signal (1331) may include information on how to generate a control command requesting movement to a specific coordinate as a blinking signal in order to move the second robot (R2) to a specific coordinate, and based on this, the position coordinate of the second robot (R2) may be generated as a second marker (1442).
한편, 제1 로봇(R1)은, 특정 임무와 관련된 작업 가이드에 근거하여, 제2 로봇(R2)이 수행할 필요가 있는 동작을 판단할 수 있다. 예를 들어, 제1 로봇(R1)은, 제2 마커(1432b)를 센싱하여 확인한 정보에 근거하여, 제2 로봇(R2)의 위치 또는 방향에 대한 변경 필요성이 있는지를 판단할 수 있다. Meanwhile, the first robot (R1) can determine the operation that the second robot (R2) needs to perform based on the work guide related to a specific task. For example, the first robot (R1) can determine whether there is a need to change the position or direction of the second robot (R2) based on the information confirmed by sensing the second marker (1432b).
본 발명에서 “작업 가이드”는, 제1 로봇(R1) 및 제2 로봇(R2)이 협업 임무를 수행하기 위하여, 제1 로봇(R1) 및 제2 로봇(R2)이 어떻게 동작해야 하는지에 대한 동작 정보를 포함할 수 있다. In the present invention, the “task guide” may include operation information on how the first robot (R1) and the second robot (R2) should operate in order for the first robot (R1) and the second robot (R2) to perform a collaborative task.
이러한 작업 가이드는, 제1 로봇(R1) 및 제2 로봇(R2)이 수행 중인 임무, 제1 로봇(R1) 및 제2 로봇(R2)이 배치된 공간 특성, 제1 로봇(R1) 및 제2 로봇(R2)의 종류 중 적어도 하나를 고려하여 결정된 제1 로봇(R1) 및 제2 로봇(R2)의 동작에 대한 정보를 포함할 수 있다. These task guides may include information about the operations of the first robot (R1) and the second robot (R2) determined by taking into account at least one of the tasks being performed by the first robot (R1) and the second robot (R2), the characteristics of the space in which the first robot (R1) and the second robot (R2) are placed, and the types of the first robot (R1) and the second robot (R2).
이처럼, 제1 로봇(R1)은, 제1 로봇(R1)의 출력부(1330)를 통해 점멸 신호(1331)를 출력함으로써, 네트워크(40)를 이용하지 않더라도, 제2 로봇(R2)의 동작을 제어하기 위한 제어 명령을 제2 로봇(R2)으로 전달할 수 있다. In this way, the first robot (R1) can transmit a control command to control the operation of the second robot (R2) to the second robot (R2) by outputting a flashing signal (1331) through the output section (1330) of the first robot (R1), even without using the network (40).
한편, 제2 로봇(R2)은, 제2 로봇(R2)에 구비된 센싱부(1460)를 통해, 제1 로봇(R1)의 출력부(1340)에 출력된 제어 신호를 센싱할 수 있다. 나아가, 제2 로봇(R2)은, 제어 신호를 센싱하는 것에 근거하여, 제어 신호에 포함된 특정 동작을 수행할 수 있다. Meanwhile, the second robot (R2) can sense the control signal output to the output unit (1340) of the first robot (R1) through the sensing unit (1460) equipped in the second robot (R2). Furthermore, the second robot (R2) can perform a specific operation included in the control signal based on sensing the control signal.
제2 로봇(R2)는 제1 로봇(R1)의 출력부(1330)에 출력되는 점멸 신호(1441)를 센싱할 수 있도록, 제1 로봇(R1)에서 출력하는 점멸 신호(1331)에 대응되는 센서를 구비하고 있을 수 있다. The second robot (R2) may be equipped with a sensor corresponding to the flashing signal (1331) output from the first robot (R1) so as to be able to sense the flashing signal (1441) output from the output section (1330) of the first robot (R1).
일 예로, 점멸 신호(1331)가 제1 로봇(R1)의 출력부(1330)에 포함된 복수의 광 출력부의 광 점등 상태 (복수의 광 출력부 중 적어도 일부의 광은 점등되고 다른 일부의 광 출력부는 소등되어 있는 상태) 및 광 점멸 상태(광이 일정 주기, 일정 시간을 간격으로 점등 및 소등을 반복하는 상태)에 근거하는 경우, 제2 로봇(R2)은 카메라부(1450)를 이용하여 점멸 신호(1441)를 센싱할 수 있다. For example, if the flashing signal (1331) is based on the light-on state of the plurality of light output units included in the output unit (1330) of the first robot (R1) (a state in which at least some of the lights among the plurality of light output units are on and other light output units are off) and the light-blinking state (a state in which the lights are repeatedly turned on and off at regular intervals, for a regular period of time), the second robot (R2) can sense the flashing signal (1441) using the camera unit (1450).
다른 예로, 점멸 신호(1331)가 펄스(pulse, 광의 전압이나 전류 또는 파동)에 근거하는 경우, 제2 로봇(R2)은 적외선 수신기와 같은 센서부(1360)을 이용하여 점멸 신호(1441)를 센싱할 수 있다. As another example, if the flashing signal (1331) is based on a pulse (voltage or current or wave of light), the second robot (R2) can sense the flashing signal (1441) using a sensor unit (1360) such as an infrared receiver.
다만, 이하에서는 설명의 편의를 위하여, 점멸 신호(1331)를 센싱하는 수단을 구분하지 않고, 제2 로봇(R2)에 구비된 센서로 명명하여 설명하도록 한다. 즉, 제2 로봇(R2)에 구비된 센서는, 제2 로봇(R2)의 카메라부(1450) 및 센서부(1360) 중 적어도 하나를 포함하는 것으로 이해될 수 있다. However, for the convenience of explanation, in the following description, the means for sensing the flashing signal (1331) will not be distinguished and will be referred to as a sensor equipped in the second robot (R2). That is, the sensor equipped in the second robot (R2) can be understood as including at least one of the camera unit (1450) and the sensor unit (1360) of the second robot (R2).
한편, 제2 로봇(R2)은, 제1 로봇(R1)의 출력부(1330)에서 출력되는 점멸 신호(1331)를 센싱하고, 센싱된 점멸신호(1331)를 통해 제1 로봇(R1)의 상태 정보 및 특정 동작에 대응되는 제어 명령 중 적어도 하나를 확인할 수 있다. Meanwhile, the second robot (R2) senses a flashing signal (1331) output from the output unit (1330) of the first robot (R1), and can check at least one of the status information of the first robot (R1) and a control command corresponding to a specific operation through the sensed flashing signal (1331).
제2 로봇(R2)은, 제1 로봇(R1)과 공유하는 점멸 신호(1331)와 관련된 매칭 정보에 근거하여, 센싱된 점멸 신호(1331)에 대응되는 제1 로봇(R1)의 상태 정보 및 제2 로봇(R2)에 대한 제어 명령 중 적어도 하나를 확인할 수 있다. The second robot (R2) can check at least one of the status information of the first robot (R1) and the control command for the second robot (R2) corresponding to the sensed flashing signal (1331) based on the matching information related to the flashing signal (1331) shared with the first robot (R1).
나아가, 제2 로봇(R2)은, 해석(인코딩 및 디코딩)과 관련된 정보에 근거하여, 센싱된 점멸 신호(1331)를 해석(또는 디코딩, Decoding)할 수 있다. Furthermore, the second robot (R2) can interpret (or decode) the sensed blinking signal (1331) based on information related to interpretation (encoding and decoding).
앞서 설명한 것과 같이, 제1 로봇(R1) 및 제2 로봇(R2)은 점멸 신호(1331)와 관련된 매칭 정보 및 점멸 신호(1331) 생성 및 해석(인코딩 및 디코딩)과 관련된 정보 중 적어도 하나를 공유하고 있을 수 있다. As described above, the first robot (R1) and the second robot (R2) may share at least one of the matching information related to the blink signal (1331) and the information related to the generation and interpretation (encoding and decoding) of the blink signal (1331).
이러한 제1 로봇(R1) 및 제2 로봇(R2)에서 공유되는 정보는, 제1 로봇(R1)의 저장부(1320) 및 제2 로봇(R2)의 저장부(1420)에 각각 저장되어 존재할 수 있다. The information shared by the first robot (R1) and the second robot (R2) may be stored in the storage unit (1320) of the first robot (R1) and the storage unit (1420) of the second robot (R2), respectively.
점멸 신호(1331)에 대응되는 정보가 특정 동작에 대한 제어 명령이면, 제2 로봇(R2)은 점멸 신호(1331)에 포함된 제어 명령에 근거하여, 제어 명령에 포함된 특정 동작을 수행할 수 있다. If the information corresponding to the flashing signal (1331) is a control command for a specific operation, the second robot (R2) can perform the specific operation included in the control command based on the control command included in the flashing signal (1331).
예를 들어, 도 19에 도시된 것과 같이, 점멸 신호(1331b)에 매칭된 정보가 특정 좌표로의 이동 요청(예를 들어, “(30, 25, 15)좌표로 위치를 변경하세요”)이면, 제2 로봇(R2)은 점멸 신호(1331b) 포함된 제어 명령에 근거하여, 특정 좌표로 이동할 수 있다. For example, as illustrated in FIG. 19, if the information matched to the flashing signal (1331b) is a request to move to a specific coordinate (e.g., “Change the location to coordinates (30, 25, 15)”), the second robot (R2) can move to the specific coordinate based on the control command included in the flashing signal (1331b).
나아가, 제2 로봇(R2)이, 점멸 신호(1331)에 포함된 제어 명령에 따라 특정 동작에 대한 수행하거나 동작을 완료하면, 제2 로봇(R2)의 동작 상태는 변경될 수 있다. Furthermore, when the second robot (R2) performs or completes a specific operation according to a control command included in the flashing signal (1331), the operation status of the second robot (R2) may be changed.
제2 로봇(R2)은, 점멸 신호(1331)에 근거하여 동작 상태가 변경되는 것에 근거하여, 변경된 동작 상태에 대응되는 특정 동작 상태의 상태 정보를 포함하는 마커를, 제2 로봇(R2)의 디스플레이부(1440)에 출력할 수 있다. 즉, 제2 로봇(R2)은, 변경된 동작 상태에 따라 점멸 신호(1331)를 변경할 수 있다. The second robot (R2) can output a marker including state information of a specific operation state corresponding to the changed operation state to the display unit (1440) of the second robot (R2) based on the change in operation state based on the flashing signal (1331). That is, the second robot (R2) can change the flashing signal (1331) according to the changed operation state.
예를 들어, 제2 로봇(R2)은, 점멸 신호(1331)에 따라 특정 좌표로의 위치 변경 중인 경우, 특정 좌표로의 위치 변경 중임에 대응되는 제2 마커(1432)를 제2 로봇(R2)의 디스플레이부(1440)에 출력하여, 특정 동작에 대한 수행을 완료 하였음을 제1 로봇(R1)에게 전달할 수 있다. For example, when the second robot (R2) is changing its position to a specific coordinate according to a blinking signal (1331), the second robot (R2) can output a second marker (1432) corresponding to the change in position to the specific coordinate on the display unit (1440) of the second robot (R2) to convey to the first robot (R1) that it has completed performing a specific operation.
제1 로봇(R1)은, 제2 로봇(R2)의 디스플레이부(1440)에 출력된 제2 마커(1441)가 변경되면, 제2 로봇(R2)에서, 제2 작업과 관련된 특정 동작이 수행되거나 특정 동작이 완료되었음을 식별할 수 있다. When the second marker (1441) output on the display unit (1440) of the second robot (R2) changes, the first robot (R1) can identify that a specific operation related to the second task has been performed or a specific operation has been completed in the second robot (R2).
제1 로봇(R1)은, 제2 로봇(R2)이 특정 동작을 완료하였다고 식별되면, 제2 작업과 관련하여 제2 로봇(R2)의 또 다른 특정 동작을 제어하기 위한 점멸 신호(1331)를, 제1 로봇(R1)에 구비된 출력부(1340)를 통하여 출력할 수 있다. When the first robot (R1) identifies that the second robot (R2) has completed a specific operation, the first robot (R1) can output a blinking signal (1331) to control another specific operation of the second robot (R2) in relation to the second task through an output unit (1340) provided in the first robot (R1).
제1 로봇(R1) 및 제2 로봇(R2)은 각각의 출력부(1330) 및 디스플레이부(1440)에 점멸 신호(1331) 또는 마커(1441, 1442)를 출력하고, 센싱부(1340, 1460)통해 센싱하는 과정을 반복하면서, 데이터 통신을 수행할 수 있다. The first robot (R1) and the second robot (R2) can perform data communication by repeating the process of outputting a blinking signal (1331) or a marker (1441, 1442) to the output unit (1330) and display unit (1440), respectively, and sensing through the sensing unit (1340, 1460).
나아가, 제1 로봇(R1) 및 제2 로봇(R2)은 데이터 통신에 근거하여, 제2 작업을 수행할 수 있다. Furthermore, the first robot (R1) and the second robot (R2) can perform a second task based on data communication.
도 20a 및 도 20b는 제1 로봇(R1) 및 제2 로봇(R2)이 협업하여 “푸드 제공 임무”를 수행하는 방법을 설명하기 위한 개념도들이다. 도 20a 및 도 20b와 함께, 제1 로봇(R1) 및 제2 로봇(R2)이 푸드 제공 임무와 관련된 제2 작업을 수행하는 방법을 설명하도록 한다. FIGS. 20A and 20B are conceptual diagrams for explaining how a first robot (R1) and a second robot (R2) collaborate to perform a “food providing task.” Together with FIGS. 20A and 20B, a method for a first robot (R1) and a second robot (R2) to perform a second task related to a food providing task will be explained.
도 20a의 (a)에 도시된 것과 같이, 제2 로봇(R2)의 식별 정보를 포함하는 제1 마커(1441) 및 제2 로봇(R2)의 상태 정보를 포함하는 제2 마커(예를 들어, “현재 위치 좌표는 (60, 78, 20)입니다”, 1432b)를 출력할 수 있다. 제1 로봇(R1)은 주변에 접근한 제2 로봇(R2)의 마커(1331, 1432b)를 센싱하고, 제2 로봇(R2)과 협업 가능 여부를 확인하여 제2 로봇(R2)을 협업 대상 로봇으로 특정할 수 있다. As illustrated in (a) of FIG. 20a, a first marker (1441) including identification information of a second robot (R2) and a second marker including status information of the second robot (R2) (e.g., “Current location coordinates are (60, 78, 20)”, 1432b) can be output. The first robot (R1) can sense the marker (1331, 1432b) of the second robot (R2) that has approached the surroundings and determine whether collaboration with the second robot (R2) is possible, thereby specifying the second robot (R2) as a collaboration target robot.
제1 로봇(R1)은 제2 마커(1432b)를 센싱하여 확인한 정보에 근거하여, 제2 로봇(R2)과의 협업을 위해 제2 로봇(R2)이 수행할 필요가 있는 동작을 판단하고, 판단된 동작을 명령하는 점멸 신호(1331)를 출력부(1330)에 출력할 수 있다. The first robot (R1) can determine an action that the second robot (R2) needs to perform for collaboration with the second robot (R2) based on information confirmed by sensing the second marker (1432b), and output a flashing signal (1331) commanding the determined action to the output unit (1330).
도 20a의 (b)에 도시된 것과 같이, 제1 로봇(R1)은, 제2 로봇(R2)의 회전을 요청하는 제어 명령에 대응되는 점멸 신호(1331c)를 제1 로봇(R1)의 출력부(1330)을 통해 출력함으로써, 제2 로봇(R2)으로 제어 명령을 전달할 수 있다.As illustrated in (b) of Fig. 20a, the first robot (R1) can transmit a control command to the second robot (R2) by outputting a flashing signal (1331c) corresponding to a control command requesting rotation of the second robot (R2) through the output unit (1330) of the first robot (R1).
제2 로봇(R2)은, 점멸 신호(1331c)에 포함된 특정 동작을 수행하고, 특정 동작에 대한 수행에 근거하여 변경된 제2 로봇(R2)의 상태 정보를 포함하는 제2 마커(1442c)를 제2 로봇(R2)의 디스플레이부(1440)에 출력할 수 있다. The second robot (R2) can perform a specific operation included in the flashing signal (1331c) and output a second marker (1442c) including changed status information of the second robot (R2) based on the performance of the specific operation to the display unit (1440) of the second robot (R2).
도 20a의 (c)에 도시된 것과 같이, 제2 로봇(R2)은, 센싱된 점멸 신호(1331c)에 포함된 제어 명령에 따라 회전(또는 위치 변경) 을 수행하고, 수행 결과에 따라 변경된 상태에 대응되는 상태 정보를 포함하는 제2 마커(예를 들어, “위치 변경을 완료하였습니다”, 1432c)를 디스플레이부(1440)에 출력할 수 있다. As illustrated in (c) of FIG. 20a, the second robot (R2) may perform rotation (or position change) according to a control command included in a sensed blinking signal (1331c), and output a second marker (e.g., “position change completed”, 1432c) including state information corresponding to the changed state according to the result of the performance to the display unit (1440).
이 때, 제2 로봇(R2)은, 디스플레이부(1440)에 기 출력되던 제2 마커(1432b)를 새로운 제2 마커(1442c)로 변경하더라도, 제2 로봇(R2)의 식별 정보를 포함하는 제1 마커(1331)는 계속해서 출력할 수 있다.At this time, even if the second robot (R2) changes the second marker (1432b) previously output on the display unit (1440) to a new second marker (1442c), the first marker (1331) including the identification information of the second robot (R2) can continue to output.
제1 로봇(R1)은, 제2 로봇(R2)에서 재 출력되는 제1 마커(1331) 및 제2 마커(1442c)를 재 센싱함으로써, 제2 로봇(R2)에서 전달하는 정보를 확인할 수 있다. The first robot (R1) can confirm the information transmitted from the second robot (R2) by re-sensing the first marker (1331) and the second marker (1442c) that are re-output from the second robot (R2).
제1 로봇(R1)은, 센싱된 제1 마커(1331)에 포함된 식별 정보가 협업 대상 로봇으로 특정된 제2 로봇(R2)의 식별 정보와 일치하지 않으면, 센싱된 제2 마커(1432)에 포함된 정보를 확인하지 않을 수 있다. The first robot (R1) may not check the information included in the sensed second marker (1432) if the identification information included in the sensed first marker (1331) does not match the identification information of the second robot (R2) specified as the collaboration target robot.
반면에, 제1 로봇(R1)은, 센싱된 제1 마커(1331)에 포함된 식별 정보가 협업 대상 로봇으로 특정된 제2 로봇(R2)의 식별 정보와 일치하면, 센싱된 제2 마커(1442c)에 포함된 정보를 확인할 수 있다. On the other hand, the first robot (R1) can check the information included in the sensed second marker (1442c) if the identification information included in the sensed first marker (1331) matches the identification information of the second robot (R2) specified as the collaboration target robot.
제1 로봇(R1)은 센싱된 제2 마커(1442c)에 포함된 정보 및 작업 가이드에 근거하여, 제2 로봇(R2)과의 협업을 위해 제2 로봇(R2)이 수행할 필요가 있는 동작을 판단하고, 제2 로봇(R2)에 대한 특정 동작 수행을 요청하는 점멸 신호(1441d)를 출력하는 과정을 재 수행할 수 있다. The first robot (R1) can re-perform the process of determining an action that the second robot (R2) needs to perform for collaboration with the second robot (R2) based on the information and task guide included in the sensed second marker (1442c) and outputting a blinking signal (1441d) requesting the second robot (R2) to perform a specific action.
도 20b의 (a)에 도시된 것과 같이, 제1 로봇(R1)은, 제2 로봇(R2)의 보관함 문(1480)을 오픈하는 동작을 요청하는 제어 명령에 대응되는 점멸 신호(예를 들어, “보관함 문을 오픈하세요”, 1441d)를 출력함으로써, 제2 로봇(R2)으로 제어 명령을 전달할 수 있다. As illustrated in (a) of Fig. 20b, the first robot (R1) can transmit a control command to the second robot (R2) by outputting a blinking signal (e.g., “Open the storage door”, 1441d) corresponding to a control command requesting an action to open the storage door (1480) of the second robot (R2).
제2 로봇(R2)은, 제2 로봇(R2)에 구비된 센서(예를 들어, 카메라)를 통해 제1 로봇(R1)에서 재 출력된 점멸 신호(1331d)를 재 센싱하고, 재 센싱된 점멸 신호(1441d)에 포함된 특정 동작을 수행할 수 있다. The second robot (R2) can re-sensor the flashing signal (1331d) re-output from the first robot (R1) through a sensor (e.g., a camera) equipped in the second robot (R2) and perform a specific operation included in the re-sensed flashing signal (1441d).
도 20B의 (b)에 도시된 것과 같이, 제2 로봇(R2)은, 센싱된 점멸 신호(1331c)에 포함된 제어 명령에 따라 동작을 수행하고, 특정 동작의 수행 결과에 따른 상태 정보를 제2 마커(예를 들어, “보관함 문을 오픈하였습니다”, 1432d)로 출력함으로써, 제1 로봇(R1)과의 제2 작업을 진행할 수 있다. As illustrated in (b) of FIG. 20B, the second robot (R2) can perform a second task with the first robot (R1) by performing an operation according to a control command included in a sensed blinking signal (1331c) and outputting status information according to the result of performing a specific operation to a second marker (e.g., “the storage locker door is opened”, 1432d).
나아가, 도 20B의 (c)에 도시된 것과 같이, 제2 작업이 완료되면, 제1 로봇(R1)은 제2 로봇(R2)으로, 특정 임무와 관련된 복수의 작업 중 제3 작업의 제어 명령을 포함하는 점멸 신호(예를 들어, “314번 테이블로 배달하세요”, 1331f)를 출력할 수 있다. Furthermore, as illustrated in (c) of FIG. 20B, when the second task is completed, the first robot (R1) can output a blinking signal (e.g., “Deliver to table 314”, 1331f) including a control command for the third task among the multiple tasks related to a specific mission to the second robot (R2).
본 발명에서는 제2 작업이 완료되는 것에 근거하여, 제2 로봇(R2)에서 특정 임무와 관련된 제3 작업이 수행되는 과정이 진행될 수 있다(S150, 15 참조).In the present invention, based on the completion of the second task, a process may be performed in which a third task related to a specific task is performed in the second robot (R2) (see S150, 15).
본 발명에서 설명되는 제3 작업은 특정 임무와 연관된 복수의 작업 중 제2 로봇(R2)에 의해 단독으로 수행되는 작업으로 이해될 수 있다.The third task described in the present invention can be understood as a task performed solely by the second robot (R2) among a plurality of tasks associated with a specific task.
제3 작업은, 제2 로봇(R2)의 제2 기능과 연관된 작업일 수 있다. The third task may be a task associated with the second function of the second robot (R2).
예를 들어, 특정 임무가 “푸드 제공 임무”라고 가정하자. 제3 작업은, 푸드 배달 로봇(제2 로봇)이, 푸드 제조 로봇(제1 로봇)에서 제조된 푸드를 목적지(예를 들어, 사용자 또는 테이블)로 배달하는 작업일 수 있다. For example, let's assume that a specific task is a "food delivery task." The third task may be a task in which a food delivery robot (second robot) delivers food manufactured by a food manufacturing robot (first robot) to a destination (e.g., a user or a table).
본 발명에서는, 제2 로봇(R2)이 제3 작업을 완료하면, 특정 임무가 완료된 것으로 판단할 수 있다. 즉, 본 발명에서 특정 임무는, 제1 작업, 제2 작업 및 제3 작업이 순차적으로 이루어지는 것에 근거하여 완료될 수 있다.In the present invention, when the second robot (R2) completes the third task, it can be determined that the specific task is completed. That is, in the present invention, the specific task can be completed based on the first task, the second task, and the third task being performed sequentially.
한편, 앞서 설명한 것과 같이, 제1 로봇(R1) 및 제2 로봇(R2)은, 제1 로봇(R1)이 제2 로봇(R2)을 센싱하고, 제2 로봇(R2)을 협업 대상 로봇으로 특정하는 것에 근거하여 협업 임무를 수행할 수 있다. Meanwhile, as explained above, the first robot (R1) and the second robot (R2) can perform a collaborative task based on the first robot (R1) sensing the second robot (R2) and specifying the second robot (R2) as a collaborative target robot.
이하에서는, 제1 로봇(R1)이 제2 로봇(R2)을 협업 대상 로봇으로 특정하는 과정을 구체적으로 설명하도록 한다. 이하에서는, 제1 로봇(R1)이 제2 로봇(R2)을 협업 대상 로봇으로 특정하는 과정을, 제1 로봇(R1)이 제2 로봇(R2) 간의 “연동”으로 설명할 수 있다. Hereinafter, the process by which the first robot (R1) specifies the second robot (R2) as the target robot for collaboration will be specifically described. Hereinafter, the process by which the first robot (R1) specifies the second robot (R2) as the target robot for collaboration can be described as “interoperability” between the first robot (R1) and the second robot (R2).
제1 로봇(R1) 및 제2 로봇(R2)의 연동은, 제1 로봇(R1)이 주변에 접근한 제2 로봇(R2)의 마커를 센싱하는 과정을 통해 진행될 수 있다. The linkage between the first robot (R1) and the second robot (R2) can be carried out through a process in which the first robot (R1) senses the marker of the second robot (R2) that has approached the surroundings.
제2 로봇(R2)은, 제2 로봇(R2)의 저장부(1420)에 저장된 지도 정보를 이용하여, 현재 위치에 대응하는 위치 정보(예를 들어, “3층 A구역 (3, 1, 1)”)를 추출할 수 있다. 제2 로봇(R2)은 추출된 현재 위치에 대응하는 위치 정보에 근거하여, 추출된 현재 위치에 대응하는 위치에서 일정 반경 이내에 포함되는 영역을 이동할 수 있다.The second robot (R2) can extract location information corresponding to the current location (e.g., “3rd floor, area A (3, 1, 1)”) using the map information stored in the storage unit (1420) of the second robot (R2). Based on the location information corresponding to the extracted current location, the second robot (R2) can move to an area included within a certain radius from the location corresponding to the extracted current location.
즉, 제2 로봇(R2)은 클라우드 서버(20)에 의한 직접적인 제어가 없거나, 오프라인 상태인 경우에도, 현재 위치에 대응하는 위치를 기준으로 기 설정된 영역을 자유롭게 이동하면서 제2 로봇과의 연동을 시도할 수 있다. That is, even if the second robot (R2) is not directly controlled by the cloud server (20) or is offline, it can freely move within a preset area based on a location corresponding to its current location and attempt to link up with the second robot.
제2 로봇(R2)은 제2 로봇(R2)의 저장부(1420)에 저장된 지도 정보에 근거하여, 제1 로봇(R1)의 위치에 대응하는 위치로 이동할 수 있다. The second robot (R2) can move to a position corresponding to the position of the first robot (R1) based on the map information stored in the storage unit (1420) of the second robot (R2).
지도 정보에는 제1 로봇(R1)의 위치에 대응하는 위치에 대한 정보를 포함할 수 있다. 제2 로봇(R2)은 지도 정보에 포함된 제1 로봇(R1)의 위치에 대응하는 위치에 근거하여, 제1 로봇(R1)의 주변으로 이동할 수 있다. The map information may include information about a location corresponding to the location of the first robot (R1). The second robot (R2) may move around the first robot (R1) based on the location corresponding to the location of the first robot (R1) included in the map information.
나아가, 제2 로봇(R2)은 지도 정보에 근거하여 이동하면서, 제2 로봇(R2)에 구비된 센서(예를 들어, 카메라)를 통해 제1 로봇(R1)을 센싱하고, 센싱된 제1 로봇(R1)의 주변으로 이동할 수 있다. Furthermore, the second robot (R2) can sense the first robot (R1) through a sensor (e.g., a camera) equipped on the second robot (R2) while moving based on map information, and move around the sensed first robot (R1).
한편, 공간(10)에 복수의 제1 로봇(R1_a, R1_b)이 존재하는 경우, 특정 제2 로봇(R2_a)은 복수의 제1 로봇(R1_a, R1_b) 중 기 설정된 기준에 근거하여, 우선순위가 높은 어느 하나의 제1 로봇(R2_a)의 주변으로 이동할 수 있다. Meanwhile, when there are multiple first robots (R1_a, R1_b) in a space (10), a specific second robot (R2_a) can move around one first robot (R2_a) with a higher priority based on a preset criterion among the multiple first robots (R1_a, R1_b).
복수의 제1 로봇(R1_a, R1_b)에 대한 우선 순위는 다양한 기준에 근거하여 결정될 수 있다. 예를 들어, 복수의 제1 로봇(R1_a, R1_b)에 대한 우선 순위는, 제1 로봇(R1) 및 제2 로봇(R2)의 종류, 제1 로봇(R1)에게 할당된 임무의 중요성 및 제1 로봇(R1)의 임무 진행 상태(또는 연동 상태) 중 적어도 하나에 근거하여 결정될 수 있다. The priorities for the plurality of first robots (R1_a, R1_b) can be determined based on various criteria. For example, the priorities for the plurality of first robots (R1_a, R1_b) can be determined based on at least one of the types of the first robot (R1) and the second robot (R2), the importance of the task assigned to the first robot (R1), and the task progress status (or linkage status) of the first robot (R1).
여기에서, 제1 로봇(R1)의 임무 진행 상태는, 제1 로봇(R1)이 다른 제2 로봇(R2)과 협업을 진행 중인 상태(또는 연동 상태)로 포함할 수 있다. Here, the mission progress status of the first robot (R1) may include a state in which the first robot (R1) is collaborating with another second robot (R2) (or a linked state).
도 21에 도시된 것과 같이, 제1 로봇(R1)의 임무 진행 상태(또는 연동 상태)는, 제1 로봇(R1)의 위치 정보 및 특정 제2 로봇(R2_a)과는 다른 제2 로봇(R2_b)의 정보에 근거하여 판단될 수 있다. 보다 구체적으로, 제1 로봇(R1)의 임무 진행 상태(또는 연동 상태)는, 제1 로봇(R1) 주변(예를 들어, 제1 로봇(R1)의 위치에 대응하는 위치를 기준으로 일정 반경 도는 영역 이내)에 특정 제2 로봇(R2_a)과는 다른 제2 로봇(R2_b) 제2 로봇(R2)이 위치하는 경우, 제1 로봇(R1)은 다른 제2 로봇(R2)과 협업을 진행 중인 상태(또는 연동 상태)로 판단될 수 있다. As illustrated in FIG. 21, the mission progress status (or linkage status) of the first robot (R1) can be determined based on the location information of the first robot (R1) and the information of the second robot (R2_b) that is different from the specific second robot (R2_a). More specifically, the mission progress status (or linkage status) of the first robot (R1) can be determined as a state in which the first robot (R1) is collaborating (or linkage status) with the other second robot (R2) when the second robot (R2) that is different from the specific second robot (R2_a) is located around the first robot (R1) (for example, within a certain radius or area based on a location corresponding to the location of the first robot (R1)).
특정 제2 로봇(R2_a)은, 다른 제2 로봇(R2_b)과 연동되지 않은 제1 로봇(R1_a)에 대해, 다른 제2 로봇(R2_b)과 연동된 제1 로봇(R1_b)보다 우선 순위를 부여할 수 있다. A specific second robot (R2_a) can give priority to a first robot (R1_a) that is not linked with another second robot (R2_b) over a first robot (R1_b) that is linked with another second robot (R2_b).
특정 제2 로봇(R2_a)은, 우선 순위에 근거하여, 다른 제2 로봇(R2_b)과 연동되지 않은 제1 로봇(R1_a)의 위치에 대응하는 위치로 이동할 수 있다. A specific second robot (R2_a) can move to a position corresponding to a position of a first robot (R1_a) that is not linked with another second robot (R2_b) based on priority.
이처럼, 제2 로봇(R2)은, 다른 제2 로봇(R2_b)과 협업 임무를 수행하지 않는 제1 로봇(R1_a)의 주변으로 이동함으로써, 제1 로봇(R1_a)과 협업 임무를 수행할 수 있다. In this way, the second robot (R2) can perform a collaborative task with the first robot (R1_a) by moving around the first robot (R1_a) that does not perform a collaborative task with another second robot (R2_b).
한편, 제1 로봇(R1)의 저장부(1320) 및 제2 로봇(R1)의 저장부(1420) 각각에는 협업 임무와 관련된 제1 작업, 제2 작업 및 제3 작업 중 적어도 하나를 포함하는 작업 이력이 존재할 수 있다. Meanwhile, the storage unit (1320) of the first robot (R1) and the storage unit (1420) of the second robot (R1) may each have a task history including at least one of the first task, the second task, and the third task related to the collaborative task.
여기에서, 작업 이력은 협업 임무와 연계된 작업 수행과 관련된 협업 정보가 적어도 하나 포함되거나, 협업 정보에 근거하여 생성되는 정보일 수 있다. Here, the work history may include at least one piece of collaboration information related to the performance of a task associated with a collaboration task, or may be information generated based on the collaboration information.
예를 들어, 제1 로봇(R1)과 관련된 협업 정보는 i) 제1 로봇(R1)에서 출력된 점멸 신호(1441)을 포함하는 영상, ii) 제1 로봇(R1)에서 출력된 점멸 신호(1441) 포함된 정보(제어 명령 등), iii) 제1 로봇(R1)에서 점멸 신호(1441)를 출력한 일시 정보, vi) 제1 로봇(R1)에서 센싱된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나를 포함하는 영상, v) 제1 로봇(R1)에서 센싱된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나에 포함된(또는 해석된 정보), vi) 제1 로봇(R1)이 수행한 동작 및 동작 수행 일시 정보 중 적어도 하나를 포함할 수 있다. For example, the collaboration information related to the first robot (R1) may include at least one of i) an image including a blinking signal (1441) output from the first robot (R1), ii) information (control command, etc.) included in the blinking signal (1441) output from the first robot (R1), iii) information on the time at which the blinking signal (1441) was output from the first robot (R1), vi) an image including at least one of the first marker (1441) and the second marker (1442) sensed by the first robot (R1), v) information included (or interpreted) in at least one of the first marker (1441) and the second marker (1442) sensed by the first robot (R1), vi) information on an action performed by the first robot (R1) and the time at which the action was performed.
제2 로봇(R2)과 관련된 협업 정보는 i) 제2 로봇(R2)에서 출력된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나(예를 들어, 마커에 대한 영상), ii) 제2 로봇(R2)에서 출력된 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나에 포함된 정보(식별 정보, 상태 정보 등), iii) 제2 로봇(R2)에서 제1 마커(1441) 및 제2 마커(1442) 중 적어도 하나를 출력한 일시 정보, vi) 제2 로봇(R2)에서 센싱된 점멸 신호(1441)를 포함하는 영상, v) 제2 로봇(R2)에서 센싱된 점멸 신호(1441)에 포함된(또는 해석된 정보), vi) 제2 로봇(R2)이 수행한 동작 및 동작 수행 일시 정보 중 적어도 하나를 포함할 수 있다. Collaboration information related to the second robot (R2) may include at least one of i) at least one of the first marker (1441) and the second marker (1442) output from the second robot (R2) (for example, an image for the marker), ii) information included in at least one of the first marker (1441) and the second marker (1442) output from the second robot (R2) (identification information, status information, etc.), iii) information on the time at which at least one of the first marker (1441) and the second marker (1442) was output from the second robot (R2), vi) an image including a blinking signal (1441) sensed by the second robot (R2), v) information included (or interpreted) in the blinking signal (1441) sensed by the second robot (R2), vi) information on an action performed by the second robot (R2) and the time at which the action was performed.
본 발명에서는 작업 이력 및 협업 정보를 구분하지 않고, 작업 이력으로 명명하여 설명하도록 한다. 본 발명에서 “작업 이력”은, “협업 정보” “로그(log)”, “로그 정보”, “협업 로그”, “협업 로그 정보”, “작업 히스토리 정보”, “협업 히스토리 정보”와 혼용하여 사용할 수 있다. In the present invention, work history and collaboration information are not distinguished, and are named and explained as work history. In the present invention, “work history” can be used interchangeably with “collaboration information,” “log,” “log information,” “collaboration log,” “collaboration log information,” “work history information,” and “collaboration history information.”
제1 로봇(R1) 및 제2 로봇(R2) 중 적어도 하나는, 각각의 저장부(1320, 1420)에 저장된 작업 이력을 기 설정된 서버(예를 들어, 클라우드 서버(20))에 전송(업데이트) 하여, 작업 이력에 대한 백업(backup), 관리, 분석 및 모니터링을 수행할 수 있다. At least one of the first robot (R1) and the second robot (R2) can transmit (update) the work history stored in each storage unit (1320, 1420) to a preset server (e.g., a cloud server (20)) to perform backup, management, analysis, and monitoring of the work history.
제1 로봇(R1) 및 제2 로봇(R2)은 네트워크(40)를 이용하여 클라우드 서버(20)와 통신이 가능한 시점에, 각각의 저장부(1420, 1320)에 저장된 작업 이력을 클라우드 서버(20)로 전송할 수 있다. The first robot (R1) and the second robot (R2) can transmit the work history stored in their respective storage units (1420, 1320) to the cloud server (20) at a time when they can communicate with the cloud server (20) using the network (40).
이 때, 제1 로봇(R1) 및 제2 로봇(R2)은 각각의 저장부(1420, 1320)에 저장된 작업 이력 중 클라우드 서버(20)에 업데이트 하지 않은 작업 이력을 클라우드 서버(20)로 전송할 수 있다. At this time, the first robot (R1) and the second robot (R2) can transmit the work history that has not been updated in the cloud server (20) among the work history stored in their respective storage units (1420, 1320) to the cloud server (20).
제1 로봇(R1) 및 제2 로봇(R2)은, 각각의 저장부(1320, 1420)에 저장된 작업 이력 업데이트 정보에 근거하여, 각각의 저장부(1320, 1420)에 저장된 작업 이력 중 어느 작업 이력을 클라우드 서버(20)에 업데이트 하였으며, 어느 작업 이력을 클라우드 서버(20)에 업데이트 하지 않았는지 판단할 수 있다. 제1 로봇(R1) 및 제2 로봇(R2)은, 클라우드 서버(20)에 업데이트하지 않은 작업 이력을 클라우드 서버(20)로 전송할 수 있다. The first robot (R1) and the second robot (R2) can determine which work history among the work history stored in each storage (1320, 1420) has been updated to the cloud server (20) and which work history has not been updated to the cloud server (20) based on the work history update information stored in each storage (1320, 1420). The first robot (R1) and the second robot (R2) can transmit the work history that has not been updated to the cloud server (20) to the cloud server (20).
나아가, 제1 로봇(R1) 및 제2 로봇(R2)은, 각각의 저장부(1320, 1420)에 저장된 작업 이력 업데이트 정보에 근거하여, 클라우드 서버(20)에 작업 이력을 마지막으로 업데이트 한 시점 이후에 저장된 작업 이력이 무엇인지를 판단할 수 있다. 제1 로봇(R1) 및 제2 로봇(R2)은, 클라우드 서버(20)에 작업 이력을 마지막으로 업데이트한 시점 이후에 저장된 작업 이력을 클라우드 서버(20)로 전송할 수 있다. Furthermore, the first robot (R1) and the second robot (R2) can determine what work history has been stored since the last time the work history was updated in the cloud server (20) based on the work history update information stored in each storage unit (1320, 1420). The first robot (R1) and the second robot (R2) can transmit the work history stored since the last time the work history was updated in the cloud server (20) to the cloud server (20).
나아가, 제1 로봇(R1) 및 제2 로봇(R2)은, 각각의 저장부(1320, 1420)의 효율을 위하여, 클라우드 서버(20)에 작업 이력이 업데이트 완료되는 것에 근거하여, 각각의 저장부(1420, 1320)에 저장된 작업 이력을 삭제할 수 있다. Furthermore, the first robot (R1) and the second robot (R2) can delete the work history stored in each storage unit (1420, 1320) based on the completion of updating the work history in the cloud server (20) for the efficiency of each storage unit (1320, 1420).
한편, 클라우드 서버(20)에서는, 제1 로봇(R1) 및 제2 로봇(R2) 중 적어도 하나로부터 수신된 작업 이력에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2)에 대한 모니터링을 수행할 수 있다. Meanwhile, the cloud server (20) can perform monitoring of the first robot (R1) and the second robot (R2) based on the work history received from at least one of the first robot (R1) and the second robot (R2).
클라우드 서버(20)에서는, 작업 이력 및 작업 이력에 포함된 협업 임무와 관련된 작업 가이드에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2) 협업 임무를 수행하기 위하여 수행한 동작을 평가할 수 있다. In the cloud server (20), the actions performed to perform the first robot (R1) and the second robot (R2) collaborative tasks can be evaluated based on the work history and the work guide related to the collaborative task included in the work history.
“작업 가이드”는, 제1 로봇(R1) 및 제2 로봇(R2)이 협업 임무를 수행하기 위하여, 제1 로봇(R1) 및 제2 로봇(R2)이 어떻게 동작해야 하는지에 대한 동작 정보를 포함할 수 있다. The “task guide” may include motion information on how the first robot (R1) and the second robot (R2) should move in order for the first robot (R1) and the second robot (R2) to perform a collaborative task.
이러한 작업 가이드는, 제1 로봇(R1) 및 제2 로봇(R2)이 수행 중인 임무, 제1 로봇(R1) 및 제2 로봇(R2)이 배치된 공간 특성, 제1 로봇(R1) 및 제2 로봇(R2)의 종류 중 적어도 하나를 고려하여 결정된 제1 로봇(R1) 및 제2 로봇(R2)의 동작에 대한 정보를 포함할 수 있다. These task guides may include information about the operations of the first robot (R1) and the second robot (R2) determined by taking into account at least one of the tasks being performed by the first robot (R1) and the second robot (R2), the characteristics of the space in which the first robot (R1) and the second robot (R2) are placed, and the types of the first robot (R1) and the second robot (R2).
예를 들어, 제1 로봇(R1) 및 제2 로봇(R2)이 협업하여 수행하는 작업이 “푸드 제공 임무”인 경우, 제1 로봇(R1) 및 제2 로봇(R2)이 수행하는 동작은, i) 제1 로봇(R1) 및 제2 로봇(R2) 간의 위치를 매칭시키는 동작, ii) 제2 로봇(R2)의 보관함 문을 여는 동작, iii) 제1 로봇(R1)이 제2 로봇(R2)의 보관함에 음식을 적재하는 동작, vi) 제1 로봇(R1)이 제2 로봇(R2)에게 목적지를 전달하는 동작, v) 제2 로봇(R2)이 목적지로 음식을 서빙(배송)하는 동작 등을 포함할 수 있다. For example, if the task performed by the first robot (R1) and the second robot (R2) in collaboration is a “food serving task,” the actions performed by the first robot (R1) and the second robot (R2) may include: i) an action of matching the positions of the first robot (R1) and the second robot (R2), ii) an action of opening the storage box door of the second robot (R2), iii) an action of the first robot (R1) loading food into the storage box of the second robot (R2), vi) an action of the first robot (R1) conveying a destination to the second robot (R2), and v) an action of the second robot (R2) serving (delivering) food to the destination.
클라우드 서버(20)는, 제1 로봇(R1) 및 제2 로봇(R2) 중 적어도 하나로부터 수신된 작업 이력을 수신하면, 제1 로봇(R1) 및 제2 로봇(R2)이 수행한 협업 임무에서 수행한 동작에 대한 평가를 수행할 수 있다. When the cloud server (20) receives a work history from at least one of the first robot (R1) and the second robot (R2), it can perform an evaluation of the actions performed in the collaborative task performed by the first robot (R1) and the second robot (R2).
클라우드 서버(20)는, 작업 이력과 작업 이력에 포함된 협업 임무에 대응되는 동작 가이드에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2)이 작업 가이드에 따라 동작을 수행하였는지를 평가할 수 있다. The cloud server (20) can evaluate whether the first robot (R1) and the second robot (R2) performed movements according to the work guide based on the work history and the movement guide corresponding to the collaborative task included in the work history.
일 예로, 클라우드 서버(20)는 제1 로봇(R1)이 작업 가이드에 따라 제2 로봇(R2)의 동작을 요청하는 제어 명령에 대응하는 점멸 신호(1331) 출력하였는지를 평가할 수 있다. 다른 예로, 클라우드 서버(20)는 제2 로봇(R2)이 제1 로봇(R1)이 출력한 점멸 신호(1331)에 따라 특정 동작을 수행하였는지를 평가할 수 있다. For example, the cloud server (20) can evaluate whether the first robot (R1) outputs a flashing signal (1331) corresponding to a control command requesting the second robot (R2) to perform an operation according to the work guide. As another example, the cloud server (20) can evaluate whether the second robot (R2) performed a specific operation according to the flashing signal (1331) output by the first robot (R1).
나아가, 클라우드 서버(20)는 제2 로봇(R2)과 관련된 작업 이력 및 제1 로봇(R1)과 관련된 작업 이력을 비교하여, 제1 로봇(R1) 및 제2 로봇(R2) 간의 통신이 원활하게 이루어졌는지를 평가할 수 있다. Furthermore, the cloud server (20) can compare the work history related to the second robot (R2) and the work history related to the first robot (R1) to evaluate whether communication between the first robot (R1) and the second robot (R2) is smooth.
보다 구체적으로, 클라우드 서버(20)는 제2 로봇(R2)이 제1 로봇(R1)이, 센싱된 마커(1441, 1442) 또는 점멸 신호(1331)에 근거하여 수행한 동작을 평가할 수 있다. More specifically, the cloud server (20) can evaluate the actions performed by the second robot (R2) and the first robot (R1) based on the sensed markers (1441, 1442) or the blinking signal (1331).
예를 들어, 제1 로봇(R1)과 관련된 작업 이력에는, 제1 로봇(R1)에서 특정 좌표(예를 들어, “(30, 25, 15)”로의 위치 변경을 요청하는 제어 명령에 대응하는 점멸 신호(1331b)를 출력한 로그 정보를 포함한다고 가정하자. 클라우드 서버(20)는 특정 좌표(예를 들어, “(30, 25, 15)”로의 위치 변경을 요청하는 제어 명령에 대응하는 점멸 신호(1331b)에 대응되는 제2 로봇(R2)의 동작이 특정 좌표로 이동하였는지, 아니면 다른 동작(예를 들어, 보관함 문을 오픈)하는 동작을 수행하였는지를 평가할 수 있다. For example, let us assume that the work history related to the first robot (R1) includes log information that outputs a flashing signal (1331b) corresponding to a control command requesting a change in position to specific coordinates (e.g., “(30, 25, 15)”) from the first robot (R1). The cloud server (20) can evaluate whether the operation of the second robot (R2) corresponding to the flashing signal (1331b) corresponding to the control command requesting a change in position to specific coordinates (e.g., “(30, 25, 15)”) moved to the specific coordinates or performed another operation (e.g., opening the locker door).
한편, 클라우드 서버(20)는 제어부(150)에 의해 로봇의 동작이 평가되는 경우, 평가의 결과에 해당하는 평가 결과 정보를 데이터 베이스에 저장할 수 있다. 클라우드 서버(20)는 평가 결과 정보를 제2 로봇(R2)이 제1 로봇(R1) 중 적어도 하나의 식별 정보와 매칭하여, 데이터베이스 상에 저장시킬 수 있다. Meanwhile, when the operation of the robot is evaluated by the control unit (150), the cloud server (20) can store evaluation result information corresponding to the evaluation result in a database. The cloud server (20) can match the evaluation result information of the second robot (R2) with the identification information of at least one of the first robots (R1) and store it in the database.
이처럼, 본 발명에서는 작업 이력에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2)이 협업 가이드에 따른 동작을 수행하는지, 제1 로봇(R1) 및 제2 로봇(R2) 간에 통신이 원활하게 이루어지는지를 평가하여, 평가 결과 정보를 생성할 수 있다. In this way, in the present invention, based on the work history, it is possible to generate evaluation result information by evaluating whether the first robot (R1) and the second robot (R2) perform movements according to the collaboration guide and whether communication between the first robot (R1) and the second robot (R2) is smooth.
클라우드 서버(20) 또는 관리자는, 제1 로봇(R1) 및 제2 로봇(R2)에서 발생되는 에러 및 이에 대한 수정 사항을 평가 결과 정보를 참고하여 확인할 수 있다. The cloud server (20) or administrator can check errors occurring in the first robot (R1) and the second robot (R2) and corrections thereto by referring to the evaluation result information.
한편, 제1 로봇(R1) 및 제2 로봇(R2)이 연동되어 협업 임무를 수행하는 과정에서, 클라우드 서버(20) 및 관리자 중 적어도 하나의 모니터링 및 개입(제어, 관제)을 필요로 하는 상황이 발생할 수 있다. Meanwhile, in the process of the first robot (R1) and the second robot (R2) working together to perform a collaborative task, a situation may arise that requires monitoring and intervention (control, supervision) by at least one of the cloud server (20) and the manager.
예를 들어, 제2 로봇(R2)이 특정 목적지로 음식 서빙(또는 배송) 동작을 수행해야 하는 상황에서, 제2 로봇(R2)이 이동하지 않고 제1 로봇(R1) 앞에 계속해서 정지해 있는 경우, 클라우드 서버(20) 및 관리자가 개입하여 제2 로봇(R2)에서 발생된 에러를 발견하고, 해당 에러를 해결할 수 있다. For example, in a situation where a second robot (R2) must perform a food serving (or delivery) operation to a specific destination, if the second robot (R2) does not move and continues to stop in front of the first robot (R1), the cloud server (20) and the administrator can intervene to discover an error that occurred in the second robot (R2) and resolve the error.
클라우드 서버(20)가 제1 로봇(R1) 및 제2 로봇(R2)을 모니터링 및 제어를 수행하기 위해서는, 네트워크(40)에 기반하여 클라우드 서버(20)와, 제1 로봇(R1) 및 제2 로봇(R2) 사이에 수행되어야 한다. In order for the cloud server (20) to monitor and control the first robot (R1) and the second robot (R2), a network (40) must be used between the cloud server (20) and the first robot (R1) and the second robot (R2).
그러나, 네트워크(40) 부재 상황, 즉 오프라인 상황에서는, 클라우드 서버(20)가 제1 로봇(R1) 및 제2 로봇(R2)에 대한 모니터링을 수행할 수 없어, 관리자가 개입되어야 하는 상황이 발생될 수 있다. However, in a situation where the network (40) is absent, i.e., offline, the cloud server (20) cannot perform monitoring of the first robot (R1) and the second robot (R2), and thus a situation may arise where an administrator must intervene.
이하에서는, 오프라인 상황에서, 관리자를 위한 모니터링 용 프로그램이 없이도, 관리자가 제1 로봇(R1) 및 제2 로봇(R2)에서 수행되는 협업 임무에 대한 모니터링을 수행할 수 있도록 하는 방법에 대하여 설명하도록 한다. Below, a method is described that enables an administrator to monitor collaborative tasks performed by a first robot (R1) and a second robot (R2) in an offline situation without a monitoring program for the administrator.
제1 로봇(R1)은, 점멸 신호(1331)과 함께, 사람이 인지 가능한 형태의 작업 이력(상태 정보, 제어 명령 등)을 제1 로봇(R1)의 출력부(1330)를 통해 출력할 수 있다.The first robot (R1) can output work history (status information, control commands, etc.) in a human-perceivable form through the output unit (1330) of the first robot (R1) along with a flashing signal (1331).
나아가, 제2 로봇(R2)은, 마커(1441, 1442)와 함께, 사람이 인지 가능한 형태의 작업 이력(상태 정보, 제어 명령 등)을 제2 로봇(R2)의 디스플레이부(1440) 상에, 출력할 수 있다. Furthermore, the second robot (R2) can output work history (status information, control commands, etc.) in a human-recognizable form on the display unit (1440) of the second robot (R2) together with markers (1441, 1442).
본 발명에서는, “사람이 인지 가능한 형태의 작업 이력(상태 정보, 제어 명령)”을, “인지 정보(1343)”로 명명하도록 한다.In the present invention, “operation history (state information, control command) in a form recognizable to a human” is named “recognizable information (1343).”
“인지 정보(1343)”는, 제2 로봇(R2)에서 출력되는 제2 마커(1442)에 포함되는 정보나, 제1 로봇(R1)에서 출력되는 점멸 신호(1441)에 포함되는 정보에 대응되는 정보를, 사람이 인지 가능한 형태의 시각적 정보를 변환한 정보로 이해될 수 있다. “Recognition information (1343)” can be understood as information that is information corresponding to information included in a second marker (1442) output from a second robot (R2) or information included in a blinking signal (1441) output from a first robot (R1), converted into visual information in a form that can be recognized by a human.
예를 들어, 도 23에 도시된 것과 같이, “인지 정보(1343)”는 제2 로봇(R2)의 제2 마커(1442)에 포함된 정보(예를 들어, “배달 중”, 1442)에 대응되는 텍스트 정보(예를 들어, “배달 임무 수행 중 입니다. ”1343a)를 포함하거나, 그래픽 객체(1343b)를 포함할 수 있다. For example, as illustrated in FIG. 23, “cognitive information (1343)” may include text information (e.g., “Performing a delivery mission.” 1343a) corresponding to information included in the second marker (1442) of the second robot (R2) (e.g., “In delivery,” 1442), or may include a graphic object (1343b).
나아가, “인지 정보(1343)”는, 제1 로봇(R1) 및 제2 로봇(R2)에서 에러가 발생되는 것에 근거하여, 에러에 대응되는 텍스트 정보(예를 들어, “Error”, 1343c)를 포함할 수 있다. Furthermore, “cognitive information (1343)” may include text information corresponding to an error (e.g., “Error”, 1343c) based on the occurrence of an error in the first robot (R1) and the second robot (R2).
한편, 제2 로봇(R2)은, 제2 로봇(R2)의 디스플레이부(1440) 상의 제1 영역에는 제1 마커(1441)을 출력하고, 제2 영역에는 제2 마커(1442)를 출력할 수 있다. 나아가, 제2 로봇(R2)은, 제1 영역 및 제2 영역과 구분되는 제3 영역에 인지 정보(1343)를 출력할 수 있다. Meanwhile, the second robot (R2) can output a first marker (1441) in a first area on the display unit (1440) of the second robot (R2) and output a second marker (1442) in a second area. Furthermore, the second robot (R2) can output recognition information (1343) in a third area that is distinguished from the first area and the second area.
제2 로봇(R2)은, 제2 로봇(R2)의 상태 정보가 변경되는 것에 근거하여, 디스플레이부(1440)의 제2 영역에 출력되는 제2 마커(1442) 및 제3 영역에 출력되는 인지 정보(1343)를 변경할 수 있다. 나아가, 제2 로봇(R2)은 제2 영역에 출력되는 제2 마커(1442) 및 제3 영역에 출력되는 인지 정보(1343)를 변경되더라도, 제1 영역에 출력되는 제2 마커(1441)은 변경하지 않을 수 있다. The second robot (R2) can change the second marker (1442) outputted in the second area of the display unit (1440) and the recognition information (1343) outputted in the third area based on the change in the status information of the second robot (R2). Furthermore, even if the second marker (1442) outputted in the second area and the recognition information (1343) outputted in the third area are changed, the second robot (R2) may not change the second marker (1441) outputted in the first area.
한편, 제1 로봇(R1)은, 제1 로봇(R1)의 출력부(1330)를 통해 점멸 신호(1441)에 포함된 정보에 대응되는 인지 정보를 출력할 수 있다. Meanwhile, the first robot (R1) can output cognitive information corresponding to the information included in the blinking signal (1441) through the output unit (1330) of the first robot (R1).
보다 구체적으로, 제1 로봇(R1)의 출력부(1330)에 포함된 복수의 광 중 일부를 통해서는 제2 로봇(R2)이 센싱 가능한 점멸 신호(1441)를 출력하고, 다른 일부를 통해서는 관리자가 인지 가능한 형태의 인지 정보를 출력할 수 있다. More specifically, some of the multiple lights included in the output section (1330) of the first robot (R1) can output a blinking signal (1441) that can be sensed by the second robot (R2), and some of the lights can output cognitive information in a form that can be recognized by the manager.
예를 들어, 제1 로봇(R1)의 출력부(1330)가 복수의 광을 포함하는 디스플레이인 경우, 디스플레이의 일 영역에는 제2 로봇(R2)이 센싱 가능한 점멸 신호(1441)를 출력하고, 다른 영역에는 관리자가 인지 가능한 형태의 인지 정보를 출력할 수 있다. For example, if the output unit (1330) of the first robot (R1) is a display including a plurality of lights, the second robot (R2) can output a blinking signal (1441) that can be sensed in one area of the display, and output cognitive information in a form that can be recognized by the manager in another area.
제1 로봇(R1)는, 제1 로봇(R1)의 출력부(1330)에 포함된 복수의 광의 색상, 깜빡임 정도, 깜박임 패턴 중 적어도 하나를 이용하여, 인지 정보를 출력할 수 있다. 예를 들어, 제1 로봇(R1)이, 제2 로봇(R2)에게 점멸 신호(1441)를 통해 제어 명령을 출력하고 잇다고 가정하자. 제1 로봇(R1)은, 출력부(1440)를 통해 특정 광(예를 들어, LED)이 특정 색상을 가지는 특정 패턴으로 깜박이도록 제어할 수 있다. The first robot (R1) can output cognitive information by using at least one of the colors, blinking degrees, and blinking patterns of the plurality of lights included in the output unit (1330) of the first robot (R1). For example, assume that the first robot (R1) is outputting a control command to the second robot (R2) through a blinking signal (1441). The first robot (R1) can control a specific light (e.g., an LED) to blink in a specific pattern with a specific color through the output unit (1440).
한편, 제1 로봇(R1) 및 제2 로봇(R2)에서 인지 정보를 출력하는 시점은 다양할 수 있다. Meanwhile, the timing at which cognitive information is output from the first robot (R1) and the second robot (R2) may vary.
일 예로, 제1 로봇(R1) 및 제2 로봇(R2)은, 협업 임무를 수행하는 중에는 인지 정보를 계속해서 출력할 수 있다. For example, the first robot (R1) and the second robot (R2) can continuously output cognitive information while performing a collaborative task.
다른 예로, 제1 로봇(R1) 및 제2 로봇(R2)은 주변에 관리자가 접근하는 경우에, 인지 정보를 출력할 수 있다. 보다 구체적으로, 제1 로봇(R1) 및 제2 로봇(R2)은 각각이 위치하는 지점으로부터 일정 반경 이내에 관리자 또는 기 설정된 사용자가 접근하면, 인지 정보를 출력할 수 있다. As another example, the first robot (R1) and the second robot (R2) can output recognition information when an administrator approaches the surroundings. More specifically, the first robot (R1) and the second robot (R2) can output recognition information when an administrator or a preset user approaches within a certain radius from the point where each of them is located.
제1 로봇(R1) 및 제2 로봇(R2)은 인지 정보를 출력하기 위하여, 각각에 구비된 센서를 통해 관리자 또는 기 설정된 사용자의 접근(또는 존재)를 센싱할 수 있다. 예를 들어, 관리자가 제2 로봇(R2)에 접근하여, 관리자에게 할당된 식별정보(예를 들어, ID 카드, QR 코드)등을 입력하면, 제2 로봇(R2)은 인지 정보를 출력할 수 있다. The first robot (R1) and the second robot (R2) can sense the approach (or presence) of an administrator or a preset user through sensors provided in each of them in order to output recognition information. For example, when an administrator approaches the second robot (R2) and inputs identification information assigned to the administrator (e.g., ID card, QR code), the second robot (R2) can output recognition information.
또 다른 예로, 제1 로봇(R1) 및 제2 로봇(R2)은 에러가 발생한 경우에, 인지 정보를 출력할 수 있다. 즉, 제1 로봇(R1) 및 제2 로봇(R2)은 에러가 발생한 경우에, 인지 정보를 출력함으로써, 에러 발생 상황에 관리자에게 도움을 요청할 수 있다. As another example, the first robot (R1) and the second robot (R2) can output cognitive information when an error occurs. That is, the first robot (R1) and the second robot (R2) can request assistance from a manager in an error situation by outputting cognitive information when an error occurs.
이처럼, 본 발명에서는 사용자가 인지가능한 형태의 인지 정보를 제공함으로써, 관리자가 공간(10)에 위치하는 제1 로봇(R1) 및 제2 로봇(R2)의 상태를 직관적으로 인식하도록 할 수 있다. In this way, the present invention provides cognitive information in a form that can be recognized by the user, thereby allowing the manager to intuitively recognize the status of the first robot (R1) and the second robot (R2) located in the space (10).
일 예로, 제2 로봇(R2)은 “배달 임무 수행 중입니다”와 같은 인지 정보를 출력하고 있음에도 불구하고 정지하고 있다면, 관리자는 제2 로봇(R2)에게 문제가 발생한 것으로 판단하고 제2 로봇(R2)의 동작에 개입할 수 있다. For example, if the second robot (R2) is stopped despite outputting cognitive information such as “performing a delivery mission,” the manager can determine that there is a problem with the second robot (R2) and intervene in the operation of the second robot (R2).
다른 예로, 제2 로봇(R2)이 “Error”와 같은 인지 정보를 출력하고 있으면, 관리자는 제2 로봇(R2)에게 문제가 발생한 것으로 직관적으로 인지하고 제2 로봇(R2)의 동작에 개입할 수 있다. As another example, if the second robot (R2) is outputting cognitive information such as “Error,” the manager can intuitively recognize that a problem has occurred with the second robot (R2) and intervene in the operation of the second robot (R2).
한편, 본 발명에서는 관리자가 제1 로봇(R1) 및 제2 로봇(R2)을 모니터링 할 수 있도록, 관리자가 소지한 단말기(2400)를 통해 작업 이력을 제공할 수 있다. Meanwhile, in the present invention, work history can be provided through a terminal (2400) carried by the manager so that the manager can monitor the first robot (R1) and the second robot (R2).
관리자가 소지한 단말기(2400)에는, 제1 로봇(R1) 및 제2 로봇(R2)의 모니터링 위한 시스템이 존재할 수 있다. The terminal (2400) possessed by the manager may have a system for monitoring the first robot (R1) and the second robot (R2).
여기에서, 제1 로봇(R1) 및 제2 로봇(R2)의 모니터링 위한 시스템은, 단말기(2400)에 설치되는 소프트웨어(software)로, 애플리케이션(Application) 또는 프로그램일 수 있다. Here, the system for monitoring the first robot (R1) and the second robot (R2) may be software installed on the terminal (2400), and may be an application or a program.
도 24의 (a) 에 도시된 것과 같이, 관리자는 관리자가 소지한 단말기(2400)를 이용하여, 제1 로봇(R1)의 점멸 신호(1331)를 촬영하거나, 제2 로봇(R2)의 마커(1441, 1442)촬영할 수 있다.As shown in (a) of Fig. 24, the manager can use the terminal (2400) possessed by the manager to capture the blinking signal (1331) of the first robot (R1) or the marker (1441, 1442) of the second robot (R2).
단말기(2400)는 촬영된 점멸 신호(1331) 및 마커(1441, 1442)에 대응되는 정보를 확인할 수 있다. The terminal (2400) can check information corresponding to the photographed blinking signal (1331) and marker (1441, 1442).
구체적으로, 단말기(2400)에는, 점멸 신호(1331)와 관련된 매칭 정보 또는 마커(1441, 1442)와 관련된 매칭 정보가 저장되어 있을 수 있다. 단말기(2400)는 점멸 신호(1331)와 관련된 매칭 정보 또는 마커(1441, 1442)와 관련된 매칭 정보에 근거하여, 촬영된 점멸 신호(1331) 및 마커(1441, 1442)에 대응되는 정보를 확인할 수 있다. Specifically, the terminal (2400) may store matching information related to the blinking signal (1331) or matching information related to the markers (1441, 1442). The terminal (2400) may check information corresponding to the photographed blinking signal (1331) and markers (1441, 1442) based on the matching information related to the blinking signal (1331) or the matching information related to the markers (1441, 1442).
단말기(2400)는 확인된 정보에 근거하여, 제1 로봇(R1) 및 제2 로봇(R2)이 수행하는 특정 임무와 관련된 작업 이력을 단말기(2400 상에 출력할 수 있다. The terminal (2400) can output work history related to specific tasks performed by the first robot (R1) and the second robot (R2) on the terminal (2400) based on the verified information.
예를 들어, 도 24의(b)에 도시된 것과 같이, 단말기(2400)상에는, 해당 로봇의 식별 정보(예를 들어, “로봇 ID : 12TEQ68”, 2410), 해당 로봇이 수행 중인 작업과 관련된 정보(예를 들어, “134번 테이블로 음료 배달 중입니다”, 2420) 및 해당 로봇의 위치 정보(2430) 중 적어도 하나가 출력될 수 있다. For example, as illustrated in (b) of FIG. 24, at least one of identification information of the robot (e.g., “Robot ID: 12TEQ68”, 2410), information related to the work being performed by the robot (e.g., “Delivering beverage to table 134”, 2420), and location information (2430) of the robot may be output on the terminal (2400).
관리자는, 단말기(2400)에 출력된 제1 로봇(R1) 및 제2 로봇(R2)의 작업 이력을 통해, 제1 로봇(R1) 및 제2 로봇(R2)의 협업 임무를 모니터링 할 수 있다. The manager can monitor the collaborative tasks of the first robot (R1) and the second robot (R2) through the work history of the first robot (R1) and the second robot (R2) output to the terminal (2400).
한편, 이상의 설명에서, 제1 로봇(R1) 및 제2 로봇(R2)이 주어가 되어 표현된 설명들은, 제1 로봇(R1)의 제어부(1350) 및 제2 로봇의 제어부(1470)로 대체되어 설명될 수 있음은 물론이다.Meanwhile, in the above explanation, it goes without saying that the explanations expressed with the first robot (R1) and the second robot (R2) as subjects can be replaced with explanations with the control unit (1350) of the first robot (R1) and the control unit (1470) of the second robot.
이상에서 살펴본 것과 같이, 본 발명에 따른 복수의 로봇들을 이용한 협업 방법 및 시스템은, 제1 로봇 및 제2 로봇 각각에 구비된 출력부 및 센싱부 간의 데이터 통신에 근거하여, 제1 로봇 및 제2 로봇들에 의해서, 특정 임무와 관련된 협업을 수행함으로써 네트워크가 부재하거나 네트워크 장애가 발생되는 상황에서도, 협업 업무를 수행할 수 있다. 따라서, 본 발명에 따른 로봇들이 포함된 건물에서는 네트워크가 존재하지 않는 환경에서도 로봇을 복수의 로봇 간 협업 업무를 통해 다양한 서비스를 제공할 수 있어, 사용자 편의성을 더욱 향상시킬 수 있다.As described above, the collaborative method and system using a plurality of robots according to the present invention can perform collaborative work even in a situation where a network is absent or a network failure occurs by performing collaboration related to a specific task by the first robot and the second robot based on data communication between the output units and sensing units provided in each of the first robot and the second robot. Therefore, in a building including robots according to the present invention, even in an environment where a network does not exist, the robots can provide various services through collaborative work among a plurality of robots, thereby further improving user convenience.
나아가, 본 발명에 따른 로봇 친화형 건물은 로봇, 자율주행, AI, 클라우드 기술이 융합되고, 연결되는 테크 컨버전스(Technological Convergence)를 이용하며, 이러한 기술과, 로봇 그리고 건물내 구비되는 설비 인프라가 유기적으로 결합되는 새로운 공간을 제공할 수 있다.Furthermore, the robot-friendly building according to the present invention utilizes technological convergence in which robots, autonomous driving, AI, and cloud technologies are integrated and connected, and can provide a new space in which these technologies, robots, and facility infrastructure provided within the building are organically combined.
나아가, 본 발명에 따른 로봇 친화형 건물은 다수의 로봇과 연동하는 클라우드 서버를 이용하여, 다수의 로봇 및 설비 인프라를 유기적으로 제어함으로써, 보다 체계적으로 서비스를 제공하는 로봇의 주행을 체계적으로 관리할 수 있다. 이를 통해, 본 발명에 따른 로봇 친화형 건물은, 보다 안전하고, 신속하게, 그리고 정확하게 사람들에게 다양한 서비스를 제공할 수 있다.Furthermore, the robot-friendly building according to the present invention can systematically manage the operation of robots that provide services more systematically by organically controlling a plurality of robots and facility infrastructure using a cloud server that is linked to a plurality of robots. Through this, the robot-friendly building according to the present invention can provide various services to people more safely, quickly, and accurately.
나아가, 본 발명에 따른 건물에 적용된 로봇은 클라우드 서버에 의해 제어되는 브레인리스(brainless) 형식으로 구현될 수 있으며, 이에 의하면, 건물에 배치되는 다수의 로봇을 값비싼 센서 없이 저렴하게 제조할 수 있을 뿐만 아니라, 고성능/고정밀로 제어할 수 있다.Furthermore, the robot applied to the building according to the present invention can be implemented in a brainless format controlled by a cloud server, and according to this, not only can a large number of robots placed in the building be manufactured inexpensively without expensive sensors, but they can also be controlled with high performance/high precision.
나아가, 본 발명에 따른 건물에서는 건물에 배치된 다수의 로봇에 할당된 임무와 이동 상황을 고려함은 물론, 사람을 배려하도록 주행이 제어됨으로써, 같은 공간 속에서 자연스럽게 로봇과 사람이 공존할 수 있다.Furthermore, in a building according to the present invention, the driving is controlled to take into consideration the tasks and movement situations assigned to a number of robots placed in the building, as well as to take people into consideration, so that robots and people can coexist naturally in the same space.
나아가, 본 발명에 따른 건물에서는 로봇에 의한 사고 방지 및 예기치 못한 상황에 대응할 수 있도록 다양한 제어를 수행함으로써, 사람들에게 로봇이 위험한 것이 아닌, 친근하고 안전하다는 인식을 심어줄 수 있다.Furthermore, in a building according to the present invention, by performing various controls to prevent accidents caused by robots and to respond to unexpected situations, it is possible to instill in people the perception that robots are friendly and safe, rather than dangerous.
한편, 위에서 살펴본 본 발명은, 컴퓨터에서 하나 이상의 프로세스에 의하여 실행되며, 이러한 컴퓨터로 판독될 수 있는 매체에 저장 가능한 프로그램으로서 구현될 수 있다.Meanwhile, the present invention discussed above can be implemented as a program that is executed by one or more processes on a computer and can be stored on a medium that can be read by the computer.
나아가, 위에서 살펴본 본 발명은, 프로그램이 기록된 매체에 컴퓨터가 읽을 수 있는 코드 또는 명령어로서 구현하는 것이 가능하다. 즉, 본 발명에 따른 다양한 제어방법은 통합하여 또는 개별적으로 프로그램의 형태로 제공될 수 있다. Furthermore, the present invention discussed above can be implemented as a computer-readable code or command on a medium in which a program is recorded. That is, various control methods according to the present invention can be provided in the form of a program, either integrated or individually.
한편, 컴퓨터가 읽을 수 있는 매체는, 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록장치를 포함한다. 컴퓨터가 읽을 수 있는 매체의 예로는, HDD(Hard Disk Drive), SSD(Solid State Disk), SDD(Silicon Disk Drive), ROM, RAM, CD-ROM, 자기 테이프, 플로피 디스크, 광 데이터 저장 장치 등이 있다. Meanwhile, computer-readable media include all types of recording devices that store data that can be read by a computer system. Examples of computer-readable media include hard disk drives (HDDs), solid state disks (SSDs), silicon disk drives (SDDs), ROMs, RAMs, CD-ROMs, magnetic tapes, floppy disks, and optical data storage devices.
나아가, 컴퓨터가 읽을 수 있는 매체는, 저장소를 포함하며 전자기기가 통신을 통하여 접근할 수 있는 서버 또는 클라우드 저장소일 수 있다. 이 경우, 컴퓨터는 유선 또는 무선 통신을 통하여, 서버 또는 클라우드 저장소로부터 본 발명에 따른 프로그램을 다운로드 받을 수 있다.Furthermore, the computer-readable medium may be a server or cloud storage that includes storage and that the electronic device can access through communication. In this case, the computer can download the program according to the present invention from the server or cloud storage through wired or wireless communication.
나아가, 본 발명에서는 위에서 설명한 컴퓨터는 프로세서, 즉 CPU(Central Processing Unit, 중앙처리장치)가 탑재된 전자기기로서, 그 종류에 대하여 특별한 한정을 두지 않는다.Furthermore, in the present invention, the computer described above is an electronic device equipped with a processor, i.e., a CPU (Central Processing Unit), and there is no particular limitation on its type.
한편, 상기의 상세한 설명은 모든 면에서 제한적으로 해석되어서는 아니되고 예시적인 것으로 고려되어야 한다. 본 발명의 범위는 첨부된 청구항의 합리적 해석에 의해 결정되어야 하고, 본 발명의 등가적 범위 내에서의 모든 변경은 본 발명의 범위에 포함된다.Meanwhile, the above detailed description should not be construed as restrictive in all respects but should be considered as illustrative. The scope of the present invention should be determined by a reasonable interpretation of the appended claims, and all changes within the equivalent scope of the present invention are included in the scope of the present invention.
Claims (10)
제1 기능을 수행하는 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업이 수행되는 단계;
상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한 제2 로봇의 디스플레이부에 출력된 마커가 센싱되는 것에 근거하여, 상기 제2 로봇이, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정되는 단계;
상기 제1 로봇 및 상기 제2 로봇에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되는 단계; 및
상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업이 수행되는 단계를 포함하는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In a collaborative method using multiple robots,
A step in which a specific task is assigned to a first robot performing a first function, and a first task associated with the specific task is performed by the first robot;
In the first robot, a step of specifying the second robot as a collaboration target robot to perform collaboration with the first robot for the specific task based on sensing of a marker output on a display unit of a second robot located around the first robot;
A step in which a second task related to the specific task is performed by the first robot and the second robot; and
A collaborative method using a plurality of robots, characterized in that it includes a step of performing a third task related to the specific task on the second robot based on the completion of the second task.
상기 제2 로봇의 디스플레이부에 출력되는 마커는, 상기 제2 로봇의 식별정보를 포함하는 제1 마커 및 상기 제2 로봇의 동작 상태에 대한 상태 정보를 포함하는 제2 마커를 포함하고,
상기 협업 대상 로봇으로서 특정되는 단계에서는,
상기 제1 로봇에 구비된 센싱부를 통해, 상기 제1 마커가 인식되는 것에 근거하여, 상기 제2 로봇이 상기 협업 대상 로봇으로서 특정되는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In the first paragraph,
The marker output on the display unit of the second robot includes a first marker including identification information of the second robot and a second marker including status information on the operating status of the second robot.
At the stage where the above collaborative robot is specified,
A collaboration method using a plurality of robots, characterized in that the second robot is specified as the collaboration target robot based on the recognition of the first marker through a sensing unit equipped in the first robot.
상기 제2 로봇의 디스플레이부에 출력되는 상기 제1 마커는,
상기 제1 로봇이 상기 제2 로봇을 식별 가능하도록, 상기 제1 로봇과 상기 제2 로봇 간에 상기 제2 작업이 수행되는 동안, 상기 제2 로봇의 디스플레이부 상에 출력되는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In the second paragraph,
The first marker output on the display section of the second robot is,
A collaborative method using a plurality of robots, characterized in that, while the second task is performed between the first robot and the second robot, the first robot is output on the display unit of the second robot so that the first robot can identify the second robot.
상기 제2 마커는,
상기 제2 로봇의 서로 다른 동작 상태에 각각 대응되는 상태 정보를 포함하는 서로 다른 종류의 동작 상태 마커 중 어느 하나를 포함하고,
상기 제1 로봇은,
상기 제1 로봇에 구비된 센싱부를 통해 상기 제2 마커를 인식하는 것에 근거하여, 상기 제2 로봇의 현재 동작 상태를 식별하는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In the second paragraph,
The second marker above is,
Including one of different types of motion state markers, each of which includes state information corresponding to different motion states of the second robot,
The above first robot,
A collaborative method using a plurality of robots, characterized in that the current operating state of the second robot is identified based on recognizing the second marker through a sensing unit equipped in the first robot.
상기 제2 작업이 수행되는 단계는,
상기 제1 로봇에서, 상기 제2 작업과 관련하여 상기 제2 로봇의 특정 동작을 제어하기 위한 제어 신호를, 상기 제1 로봇에 구비된 출력부를 통하여 출력하는 단계;
상기 제2 로봇에서, 상기 제2 로봇에 구비된 센싱부를 통해, 상기 제어 신호를 센싱하는 단계;
상기 제2 로봇에서 상기 제어 신호를 센싱하는 것에 근거하여, 상기 특정 동작을 수행하는 단계를 포함하는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In paragraph 4,
The step in which the above second task is performed is:
A step of outputting, in the first robot, a control signal for controlling a specific operation of the second robot in relation to the second task, through an output unit provided in the first robot;
In the second robot, a step of sensing the control signal through a sensing unit provided in the second robot;
A collaborative method using a plurality of robots, characterized by including a step of performing the specific operation based on sensing the control signal from the second robot.
상기 제2 로봇의 디스플레이부에 출력되는 상기 제2 마커는,
상기 제어 신호에 근거하여 동작 상태가 변경되는 것에 근거하여, 변경된 동작 상태에 대응되는 특정 동작 상태 마커로 변경되는 것을 특징으로 하는 복수의 로봇들을 이용한 협업 방법.In paragraph 5,
The second marker output on the display section of the second robot is,
A collaborative method using a plurality of robots, characterized in that a specific operating state marker is changed corresponding to the changed operating state based on a change in the operating state based on the above control signal.
상기 건물은,
상기 제1 로봇 및 상기 제2 로봇이 위치하는 공간을 포함하고,
상기 제1 로봇 및 상기 제2 로봇은,
상기 클라우드 서버로부터 수신되는 제어명령에 근거하여, 제1 기능을 수행하는 상기 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업이 수행되는 단계;
상기 제1 로봇에서, 상기 제1 로봇 주변에 위치한 상기 제2 로봇의 디스플레이부에 출력된 마커가 센싱되는 것에 근거하여, 상기 제2 로봇이, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정되는 단계;
상기 제1 로봇 및 상기 제2 로봇에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되는 단계; 및
상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업이 수행되는 단계를 통해, 상기 건물에서 상기 특정 임무를 수행하고,
상기 클라우드 서버에는,
상기 제1 로봇 및 상기 제2 로봇 중 적어도 하나로부터 수신되는 작업 이력 정보에 근거하여, 상기 특정 임무에 대한 작업 입력이 업데이트되는 것을 특징으로 하는 건물.In a building where the first robot and the second robot that communicate with the cloud server are located,
The above building,
Including a space where the first robot and the second robot are located,
The above first robot and the above second robot,
A step in which a specific task is assigned to the first robot performing the first function based on a control command received from the cloud server, and a first task associated with the specific task is performed by the first robot;
In the first robot, a step of specifying the second robot as a collaboration target robot to perform collaboration with the first robot for the specific task based on sensing of a marker output on the display unit of the second robot located around the first robot;
A step in which a second task related to the specific task is performed by the first robot and the second robot; and
Based on the completion of the above second task, a third task related to the above specific task is performed by the second robot, thereby performing the above specific task in the building,
In the above cloud server,
A building characterized in that the work input for the specific task is updated based on work history information received from at least one of the first robot and the second robot.
상기 로봇 협업 시스템에서는,
제1 기능을 수행하는 제1 로봇에 대해 특정 임무가 할당되고, 상기 제1 로봇에서 상기 특정 임무와 연관된 제1 작업을 수행하고,
상기 제1 로봇에서 상기 제1 로봇 주변에 위치한 상기 제2 로봇의 디스플레이부에 출력된 마커가 센싱되는 것에 근거하여, 상기 제2 로봇을, 상기 제1 로봇과 상기 특정 임무에 대하여 협업을 수행할 협업 대상 로봇으로서 특정하고,
상기 제1 로봇 및 상기 제2 로봇에 의해서, 상기 특정 임무와 관련된 제2 작업이 수행되고,
상기 제2 작업이 완료되는 것에 근거하여, 상기 제2 로봇에서 상기 특정 임무와 관련된 제3 작업을 수행하는 것을 통해, 상기 특정 임무에 대한 협업이 이루어지는 것을 특징으로 하는 로봇 협업 시스템.In a robot collaboration system where collaboration takes place between a first robot and a second robot,
In the above robot collaboration system,
A specific task is assigned to a first robot performing a first function, and the first robot performs a first task associated with the specific task.
Based on sensing of a marker output on the display unit of the second robot located around the first robot from the first robot, the second robot is specified as a collaboration target robot to perform collaboration with the first robot for the specific task,
A second task related to the specific task is performed by the first robot and the second robot,
A robot collaboration system characterized in that collaboration for the specific task is achieved by performing a third task related to the specific task on the second robot based on the completion of the second task.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020240018733A KR102809452B1 (en) | 2021-11-30 | 2024-02-07 | Robot-friendly building, method and system for collaboration using multiple robots |
| KR1020250062022A KR20250077400A (en) | 2021-11-30 | 2025-05-13 | Robot-friendly building, method and system for collaboration using multiple robots |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210169316A KR102636467B1 (en) | 2021-11-30 | 2021-11-30 | Robot-friendly building, method and system for collaboration using multiple robots |
| KR1020240018733A KR102809452B1 (en) | 2021-11-30 | 2024-02-07 | Robot-friendly building, method and system for collaboration using multiple robots |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210169316A Division KR102636467B1 (en) | 2021-11-30 | 2021-11-30 | Robot-friendly building, method and system for collaboration using multiple robots |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020250062022A Division KR20250077400A (en) | 2021-11-30 | 2025-05-13 | Robot-friendly building, method and system for collaboration using multiple robots |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20240025571A KR20240025571A (en) | 2024-02-27 |
| KR102809452B1 true KR102809452B1 (en) | 2025-05-16 |
Family
ID=86612646
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210169316A Active KR102636467B1 (en) | 2021-11-30 | 2021-11-30 | Robot-friendly building, method and system for collaboration using multiple robots |
| KR1020240018733A Active KR102809452B1 (en) | 2021-11-30 | 2024-02-07 | Robot-friendly building, method and system for collaboration using multiple robots |
| KR1020250062022A Pending KR20250077400A (en) | 2021-11-30 | 2025-05-13 | Robot-friendly building, method and system for collaboration using multiple robots |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210169316A Active KR102636467B1 (en) | 2021-11-30 | 2021-11-30 | Robot-friendly building, method and system for collaboration using multiple robots |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020250062022A Pending KR20250077400A (en) | 2021-11-30 | 2025-05-13 | Robot-friendly building, method and system for collaboration using multiple robots |
Country Status (2)
| Country | Link |
|---|---|
| KR (3) | KR102636467B1 (en) |
| WO (1) | WO2023101228A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102636467B1 (en) * | 2021-11-30 | 2024-02-14 | 네이버랩스 주식회사 | Robot-friendly building, method and system for collaboration using multiple robots |
| KR102881444B1 (en) * | 2023-11-30 | 2025-11-06 | 주식회사 지오로봇 | System for non-directional coupling of modular mobile robots and contolling method therof |
| CN117590757B (en) * | 2024-01-19 | 2024-05-07 | 成都航空职业技术学院 | Multi-unmanned aerial vehicle cooperative task allocation method based on Gaussian distribution sea-gull optimization algorithm |
| WO2025209586A1 (en) * | 2024-04-06 | 2025-10-09 | 科沃斯机器人股份有限公司 | Positioning calibration method, multi-robot cooperative system, working method, and robot |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102636467B1 (en) * | 2021-11-30 | 2024-02-14 | 네이버랩스 주식회사 | Robot-friendly building, method and system for collaboration using multiple robots |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20100086093A (en) * | 2009-01-22 | 2010-07-30 | 주식회사 이제이봇 | Location control system of autonomous group robot |
| JP2015223634A (en) * | 2014-05-26 | 2015-12-14 | セイコーエプソン株式会社 | Robot system, robot, and control device |
| US9682481B2 (en) * | 2015-10-26 | 2017-06-20 | X Development Llc | Communication of information regarding a robot using an optical identifier |
| JP2018126810A (en) * | 2017-02-06 | 2018-08-16 | 川崎重工業株式会社 | Robot system and robot interaction method |
| KR102137033B1 (en) * | 2018-10-15 | 2020-07-23 | 엘지전자 주식회사 | Method of robot's cooperation based on resource distribution and robot with cooperating each other |
| KR20210072588A (en) * | 2019-12-09 | 2021-06-17 | 엘지전자 주식회사 | Method of providing service by controlling robot in service area, system and robot implementing thereof |
-
2021
- 2021-11-30 KR KR1020210169316A patent/KR102636467B1/en active Active
-
2022
- 2022-10-31 WO PCT/KR2022/016811 patent/WO2023101228A1/en not_active Ceased
-
2024
- 2024-02-07 KR KR1020240018733A patent/KR102809452B1/en active Active
-
2025
- 2025-05-13 KR KR1020250062022A patent/KR20250077400A/en active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102636467B1 (en) * | 2021-11-30 | 2024-02-14 | 네이버랩스 주식회사 | Robot-friendly building, method and system for collaboration using multiple robots |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240025571A (en) | 2024-02-27 |
| WO2023101228A1 (en) | 2023-06-08 |
| KR20230081348A (en) | 2023-06-07 |
| KR102636467B1 (en) | 2024-02-14 |
| KR20250077400A (en) | 2025-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102809452B1 (en) | Robot-friendly building, method and system for collaboration using multiple robots | |
| KR102705200B1 (en) | Method and system for controling robot driving in a building | |
| KR102790357B1 (en) | Robot-friendly building, method and system for robot charging control | |
| KR102773624B1 (en) | Robot-friendly building, robot and system for controling multi-robot driving in the building | |
| KR102620941B1 (en) | Method and system for controling robot driving in a building | |
| KR20250011993A (en) | Robot-friendly building, method and system for deliverying using robot | |
| KR20250047708A (en) | Robot-friendly buildings, methods and systems for map creation for robot operation | |
| KR20250143725A (en) | Robot-friendly building, method and system for controling robot divinging in the building | |
| KR102790419B1 (en) | Robot-friendly building, method and system for controlling tasks of robot | |
| KR20250016349A (en) | Robot-friendly building, method and system for controlling robot driving in the building | |
| KR20250037427A (en) | Robot-friendly building, methods and systems for map creation for robot operation | |
| KR102913732B1 (en) | Robot-friendly building, method and system for controlling robot driving in the building | |
| KR102667685B1 (en) | Robot-friendly building, method and system for controlling robot driving in the building | |
| KR102770996B1 (en) | Robot-friendly buildings, methods and systems for monitoring robot operations | |
| KR20250171221A (en) | Robot-friendly building, method and system for controlling robot driving in the building |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20240207 Patent event code: PA01071R01D Filing date: 20211130 Application number text: 1020210169316 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20241202 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20241219 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20250220 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20250514 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20250514 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |