KR102739314B1 - Electronic device and the method for synchronizing vehicle speed - Google Patents
Electronic device and the method for synchronizing vehicle speed Download PDFInfo
- Publication number
- KR102739314B1 KR102739314B1 KR1020230103373A KR20230103373A KR102739314B1 KR 102739314 B1 KR102739314 B1 KR 102739314B1 KR 1020230103373 A KR1020230103373 A KR 1020230103373A KR 20230103373 A KR20230103373 A KR 20230103373A KR 102739314 B1 KR102739314 B1 KR 102739314B1
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- group
- vehicles
- information
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 17
- 238000004891 communication Methods 0.000 claims abstract description 49
- 230000001360 synchronised effect Effects 0.000 claims abstract description 12
- 230000008859 change Effects 0.000 claims description 23
- 230000001133 acceleration Effects 0.000 claims description 22
- 238000012508 change request Methods 0.000 claims description 7
- 230000006870 function Effects 0.000 description 6
- 238000004590 computer program Methods 0.000 description 4
- 230000010354 integration Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images












Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/07—Controlling traffic signals
- G08G1/08—Controlling traffic signals according to detected number or speed of vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Traffic Control Systems (AREA)
Abstract
본 문서에 개시되는 일 실시 예에 따른 전자 장치는, 복수의 차량들에 대한 통신 채널을 제공하는 통신 모듈; 및 상기 통신 모듈과 기능적으로 연결된 프로세서를 포함하고, 상기 프로세서는, 상기 통신 모듈을 통해 상기 복수의 차량들로부터 복수의 차량 위치 정보를 획득하고, 상기 복수의 차량 위치 정보에 기반하여 상기 복수의 차량들 중 동일 도로의 동일 차로에서 주행중인 차량들을 그룹화하고, 상기 통신 모듈을 통해 각 그룹에서 선두 차량의 속도 정보를 획득하고, 상기 각 그룹 내 차량들의 속도 제어가 동기화되도록, 상기 통신 모듈을 통해 상기 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공할 수 있다.An electronic device according to one embodiment disclosed in the present document comprises: a communication module providing a communication channel for a plurality of vehicles; and a processor functionally connected to the communication module, wherein the processor obtains a plurality of vehicle location information from the plurality of vehicles through the communication module, groups vehicles driving in the same lane of the same road among the plurality of vehicles based on the plurality of vehicle location information, obtains speed information of a leading vehicle in each group through the communication module, and provides the speed information of the leading vehicle to the vehicles in each group through the communication module so that speed control of the vehicles in each group is synchronized.
Description
본 연구는 산업통상자원부와 한국산업기술평가관리원이 지원하는 자율주행기술개발혁신사업(20014361)으로 수행된 연구결과입니다.This study was conducted as a result of the Autonomous Driving Technology Development Innovation Project (20014361) supported by the Ministry of Trade, Industry and Energy and the Korea Industrial Technology Assessment and Management Institute.
본 문서에서 개시되는 다양한 실시 예들은, 차량 간 속도 공유 기술과 관련된다.Various embodiments disclosed in this document relate to inter-vehicle speed sharing technology.
교통 체증은 교통량이 많은 곳에서 흔히 찾아볼 수 있는 현상인데, 그 원인 중 하나로는 교통 상황의 변화에 의한 차량의 속도 변화(가속, 감속)가 있다. 예컨대, 교통 상황의 변화에 의한 차량의 속도 변화에 따른 교통 체증 현상은 유령 정체, 무빙 보틀넥 현상이 있다.Traffic congestion is a common phenomenon in places with a lot of traffic, and one of the causes is the change in vehicle speed (acceleration, deceleration) due to changes in traffic conditions. For example, traffic congestion caused by changes in vehicle speed due to changes in traffic conditions includes phantom traffic jams and moving bottlenecks.
도 1은 종래의 교통 체증 현상을 초래하는 유령 정체를 설명하기 위한 도면이고, 도 2는 종래의 교통 체증 현상을 초래하는 무빙 보틀넥 현상을 설명하기 위한 도면이다.Figure 1 is a drawing for explaining a phantom traffic jam that causes conventional traffic congestion, and Figure 2 is a drawing for explaining a moving bottleneck phenomenon that causes conventional traffic congestion.
유령 정체에 따르면, 옆 차로의 차량이 일 차량의 앞으로 끼어들었을 때 일 차량이 앞 차량의 움직임을 판단하고 브레이크를 밟아서 차량의 속도를 줄여야 하므로 그에 지체시간이 발생한다. 일 차량을 뒤따라오는 차량들도 바로 앞 차량의 움직임을 판단하고 감속해야 하므로 그에 지체시간이 발생한다. 이러한 지체시간은 뒤차량으로 갈수록 누적되므로, 뒤차량일수록 점점 느려지다가 결국 멈춰 설 수 있다. According to the phantom traffic jam, when a vehicle in the next lane cuts in front of a vehicle, the vehicle must judge the movement of the vehicle in front and apply the brakes to reduce its speed, which causes a delay time. The vehicles following the vehicle must also judge the movement of the vehicle in front and slow down, which causes a delay time. This delay time accumulates as you go to the vehicles behind, so the vehicles behind you will gradually slow down and eventually stop.
예를 들어, 도 1을 참조하여 유령 정체를 설명하면 아래와 같다.For example, referring to Figure 1, a phantom identity is explained as follows.
- 0번 차량의 차로 변경 발생. - Lane change occurred for
- 1번 차량의 속도 변화 발생. 이때, 1번 차량은 0번 차량의 차로 변경을 판단한 후 감속하므로, 지체시간이 발생한다.- A change in speed occurs in
- 2번 차량의 속도 변화 발생. 이때, 2번 차량은 1번 차량의 감속을 판단한 후 감속하므로, 지체시간이 발생한다.- A change in speed occurs in
- 3번 이후의 차량들도 2번 차량과 비슷한 과정을 거친다.- Vehicles after
도 2를 참조하면, 무빙 보틀넥(moving bottleneck) 현상은 도로 위 한 차량이 다른 차량보다 저속 주행함에 따라 다른 차량의 흐름을 방해하는 현상이다. Referring to Figure 2, the moving bottleneck phenomenon is a phenomenon in which one vehicle on the road impedes the flow of other vehicles by driving at a slower speed than other vehicles.
후행 차량 운전자는 선행 차량의 제어 상황을 육안으로 확인하고 사고를 예방할 수 있는 주행 형태를 판단한 후 주행하므로, 확인 및 판단 과정에서 지체시간이 발생한다. 따라서, 선행 차량으로 인해 발생된 교통 체증은 그 뒤로 갈수록 누적되어 가중될 수 있다.The driver of the following vehicle visually checks the control status of the preceding vehicle and determines the driving style that can prevent accidents before driving, so there is a delay in the process of checking and determining. Accordingly, traffic congestion caused by the preceding vehicle can accumulate and become worse as it goes on.
본 문서에 개시되는 다양한 실시 예들은 차량 속도를 동기화 제어할 있는 전자 장치 및 그 차량 속도 동기화 방법을 제공할 수 있다.Various embodiments disclosed in this document can provide an electronic device capable of synchronizing vehicle speed control and a vehicle speed synchronization method thereof.
본 문서에 개시되는 일 실시 예에 따른 전자 장치는, 복수의 차량들에 대한 통신 채널을 제공하는 통신 모듈; 및 상기 통신 모듈과 기능적으로 연결된 프로세서를 포함하고, 상기 프로세서는, 상기 통신 모듈을 통해 상기 복수의 차량들로부터 복수의 차량 위치 정보를 획득하고, 상기 복수의 차량 위치 정보에 기반하여 상기 복수의 차량들 중 동일 도로의 동일 차로에서 주행중인 차량들을 그룹화하고, 상기 통신 모듈을 통해 각 그룹에서 선두 차량의 속도 정보를 획득하고, 상기 각 그룹 내 차량들의 속도 제어가 동기화되도록, 상기 통신 모듈을 통해 상기 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공할 수 있다.An electronic device according to one embodiment disclosed in the present document comprises: a communication module providing a communication channel for a plurality of vehicles; and a processor functionally connected to the communication module, wherein the processor obtains a plurality of vehicle location information from the plurality of vehicles through the communication module, groups vehicles driving in the same lane of the same road among the plurality of vehicles based on the plurality of vehicle location information, obtains speed information of a leading vehicle in each group through the communication module, and provides the speed information of the leading vehicle to the vehicles in each group through the communication module so that speed control of the vehicles in each group is synchronized.
또한, 본 문서에 개시되는 일 실시 예에 따른 전자 장치에 의한 차량 속도 동기화 방법은, 복수의 차량들로부터 복수의 차량 위치 정보를 획득하는 동작; 상기 복수의 차량 위치 정보에 기반하여 상기 복수의 차량들 중 동일 도로의 동일 차로에서 주행중인 차량들을 그룹화하는 동작; 각 그룹에서 선두 차량의 속도 정보를 획득하는 동작; 및 상기 각 그룹 내 차량들의 속도 제어가 동기화되도록, 상기 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공하는 동작을 포함할 수 있다.In addition, a method for synchronizing vehicle speeds by an electronic device according to an embodiment disclosed in the present document may include an operation of obtaining a plurality of vehicle location information from a plurality of vehicles; an operation of grouping vehicles driving in the same lane of the same road among the plurality of vehicles based on the plurality of vehicle location information; an operation of obtaining speed information of a leading vehicle in each group; and an operation of providing speed information of the leading vehicle to the vehicles in each group so that speed control of the vehicles in each group is synchronized.
본 문서에 개시되는 다양한 실시 예들에 따르면, 도로를 주행하는 차량 속도를 동기화할 수 있다. 이 외에, 본 문서를 통해 직접적 또는 간접적으로 파악되는 다양한 효과들이 제공될 수 있다.According to various embodiments disclosed in this document, it is possible to synchronize the speed of a vehicle driving on a road. In addition, various effects that are directly or indirectly recognized through this document can be provided.
도 1은 종래의 교통 체증 현상을 초래하는 유령 정체를 설명하기 위한 도면.
도 2는 종래의 교통 체증 현상을 초래하는 무빙 보틀넥 현상을 설명하기 위한 도면.
도 3은 일 실시예에 따른 전자 장치의 구현 환경.
도 4는 일 실시예에 따른 전자 장치의 구성도.
도 5 및 도 6은 일 실시예에 따른 차량 속도 동기화의 예시.
도 7a 및 도 7b은 일 실시예에 따른 차량 그룹 통합 또는 분리의 예.
도 8은 일 실시예에 따른 차로 변경 상황의 그룹 제어 예.
도 9는 일 실시예에 따른 차량 속도 동기화 방법의 흐름도.
도 10은 일 실시예에 따른 차량 속도 동기화 방법의 세부 흐름도.
도면의 설명과 관련하여, 동일 또는 유사한 구성요소에 대해서는 동일 또는 유사한 참조 부호가 사용될 수 있다.Figure 1 is a drawing to explain phantom traffic jams that cause conventional traffic congestion.
Figure 2 is a drawing to explain the moving bottleneck phenomenon that causes conventional traffic congestion.
Figure 3 is an implementation environment of an electronic device according to one embodiment.
Figure 4 is a block diagram of an electronic device according to one embodiment.
Figures 5 and 6 are examples of vehicle speed synchronization according to one embodiment.
Figures 7a and 7b are examples of vehicle group integration or separation according to one embodiment.
Fig. 8 is an example of group control of a lane change situation according to one embodiment.
Fig. 9 is a flow chart of a vehicle speed synchronization method according to one embodiment.
Fig. 10 is a detailed flowchart of a vehicle speed synchronization method according to one embodiment.
In connection with the description of the drawings, the same or similar reference numerals may be used for identical or similar components.
도 3은 일 실시예에 따른 전자 장치의 구현 환경을 나타낸다.Figure 3 illustrates an implementation environment of an electronic device according to one embodiment.
도 3을 참조하면, 일 실시예에 따르면, 차량(200_1 …200_N)은 자율 주행 자동차와 같은 운전자의 운전을 보조하는 기능을 가진 차량일 수 있다. 차량(200_1 …200_N)은 V2X(vehicle to everything) 통신할 수 있도록 구비될 수 있다. 예를 들어, 차량(200_1 …200_N)은 전자 장치(100)와 V2I(vehicle to infrastructure) 통신할 수 있다.Referring to FIG. 3, according to one embodiment, the vehicle (200_1 ... 200_N) may be a vehicle having a function of assisting a driver's driving, such as an autonomous vehicle. The vehicle (200_1 ... 200_N) may be equipped to enable V2X (vehicle to everything) communication. For example, the vehicle (200_1 ... 200_N) may enable V2I (vehicle to infrastructure) communication with an electronic device (100).
일 실시예에 따르면, 전자 장치(100)는 예를 들면, 차량 속도 동기화 서비스를 제공하는 사업자 서버일 수 있다. 하지만, 이에 한정되지 않는다. According to one embodiment, the electronic device (100) may be, for example, a business server providing a vehicle speed synchronization service, but is not limited thereto.
일 실시예에 따르면, 전자 장치(100)는 V2I 통신을 통해 차량(200_1 …200_N)으로부터 각 차량들의 차량 위치 정보를 획득할 수 있다. 상기 차량 위치 정보는 차량 식별 정보, 차량 위치 좌표값, 링크 ID 및 차로 번호를 포함할 수 있다. According to one embodiment, the electronic device (100) can obtain vehicle location information of each vehicle from the vehicles (200_1 ... 200_N) through V2I communication. The vehicle location information can include vehicle identification information, vehicle location coordinate values, link ID, and lane number.
일 실시예에 따르면, 전자 장치(100)는 복수의 차량 위치 정보에 기반하여 복수의 차량들 중 동일한 도로의 같은(동일) 차로에서 주행중인 차량들을 그룹화할 수 있다. 이와 관련하여, 전자 장치(100)는 차량 위치 정보에 포함된 링크 ID 및 차로 번호에 기반하여 동일한 도로의 동일 차로에서 주행중인 차량을 확인할 수 있다.According to one embodiment, the electronic device (100) can group vehicles driving in the same (same) lane of the same road among the plurality of vehicles based on the plurality of vehicle location information. In this regard, the electronic device (100) can identify vehicles driving in the same lane of the same road based on the link ID and lane number included in the vehicle location information.
일 실시예에 따르면, 전자 장치(100)는 각 그룹에서 선두 차량(200_1)의 속도 정보를 획득하고, 획득된 속도 정보를 그룹 내 차량(200_1~N, N은 2이상의 상수)에 제공함에 따라 그룹 내 차량들의 속도 제어를 동기화할 수 있다. 상기 속도 정보는 속도, 가속도, 엑셀레이터(accelerator) 상태 또는 브레이크(break) 상태 중 적어도 하나의 정보를 포함할 수 있다. 그룹 내 후행 차량(예: 200_N)은 선두 차량의 속도를 바로 확인하고 선두 차량의 속도를 추종할 수 있다. 이로써, 일 실시예에 따른 전자 장치(100)는 같은 차로에 있는 차량들이 기차처럼 같은 속도와 가속도로 움직이도록 지원할 수 있어, 운전자의 판단 시간을 줄이고, 그로 인한 교통 체증을 완화할 수 있다. According to one embodiment, the electronic device (100) may obtain speed information of a leading vehicle (200_1) in each group and provide the obtained speed information to vehicles (200_1 to N, where N is a constant of 2 or more) in the group, thereby synchronizing speed control of the vehicles in the group. The speed information may include at least one of information on speed, acceleration, an accelerator state, or a brake state. A following vehicle (e.g., 200_N) in the group may directly check the speed of the leading vehicle and follow the speed of the leading vehicle. Accordingly, the electronic device (100) according to one embodiment may support vehicles in the same lane to move at the same speed and acceleration like a train, thereby reducing a driver's decision time and alleviating traffic congestion caused by the same.
일 실시예에 따르면, 전자 장치(100)는 그룹 내 후행 차량(예: 200_1 내지 200_N 사이에 위치한 차량)이 급격한 속도 변화에 대응하는 지정된 조건에 부합하는 것을 확인하면, 해당 차량의 이후 차량에 대해 후행 차량의 속도 정보를 제공할 수 있다. 예를 들어, 전자 장치(100)는 주행 차량이 급감속하는 경우, 급정차하는 경우, 또는 차로 변경하는 경우 중 적어도 하나의 경우에 지정된 조건에 부합하는 것으로 결정할 수 있다.According to one embodiment, when the electronic device (100) determines that a following vehicle in the group (e.g., a vehicle located between 200_1 and 200_N) meets a specified condition corresponding to a sudden change in speed, the electronic device (100) may provide speed information of the following vehicle to the following vehicle. For example, the electronic device (100) may determine that the specified condition is met in at least one of the cases of a driving vehicle suddenly decelerating, suddenly stopping, or changing lanes.
일 실시예에 따르면, 전자 장치(100)는 경로 정보 또는 차량 위치 정보에 기반하여 그룹을 분리하거나, 새롭게 구성하거나, 병합할 수 있다. 예를 들어, 전자 장치(100)는 주행 도로나 차로에 변화가 있는 각 그룹 내 차량을 확인하면, 확인된 차량을 해당 그룹에서 제외할 수 있다.According to one embodiment, the electronic device (100) can separate, reconfigure, or merge groups based on path information or vehicle location information. For example, if the electronic device (100) identifies a vehicle in each group that has a change in the driving road or lane, it can exclude the identified vehicle from the group.
이와 같이, 일 실시예에 따른 전자 장치(100)는 같은 차로를 주행중인 차량에 대하여 제어 상태를 공유할 수 있어, 선두 차량의 제어 상태를 확인하고 어떻게 운전할지 판단하는데 소요되는 판단 시간을 줄일 수 있고, 따라서 교통 체증을 완화할 수 있다.In this way, the electronic device (100) according to one embodiment can share the control state with respect to vehicles driving in the same lane, thereby reducing the judgment time required to check the control state of the leading vehicle and determine how to drive, and thus alleviating traffic congestion.
도 4는 일 실시예에 따른 전자 장치의 구성도를 나타낸다.Figure 4 shows a configuration diagram of an electronic device according to one embodiment.
도 4를 참조하면, 일 실시예에 따른 전자 장치(100)는 통신 모듈(110), 메모리(120) 및 프로세서(130)를 포함할 수 있다. 일 실시 예에서, 전자 장치(100)는 일부 구성요소가 생략되거나, 추가적인 구성요소를 더 포함할 수 있다. 예를 들어, 사용자 입력을 수신하는 입력 장치(미도시) 및 청각적 또는 시각적 요소를 출력하는 출력 장치(미도시)를 더 포함할 수 있다. 또한, 전자 장치(100)의 구성요소들 중 일부가 결합되어 하나의 개체로 구성되되, 결합 이전의 해당 구성요소들의 기능을 동일하게 수행할 수 있다. Referring to FIG. 4, an electronic device (100) according to one embodiment may include a communication module (110), a memory (120), and a processor (130). In one embodiment, the electronic device (100) may omit some components or may further include additional components. For example, the electronic device (100) may further include an input device (not shown) for receiving a user input and an output device (not shown) for outputting an auditory or visual element. In addition, some of the components of the electronic device (100) may be combined to form a single entity, but may perform the functions of the corresponding components prior to combination in the same manner.
통신 모듈(110)은 전자 장치(100)와 다른 장치(예: 차량()) 간의 통신 채널 또는 무선 통신 채널의 수립, 및 수립된 통신 채널을 통한 통신 수행을 지원할 수 있다. 상기 통신 모듈(110)은 예를 들어, V2V(vehicle to vehicle, 차량-차량 간 통신), V2I(vehicle to infrastructure, 차량-인프라간 통신), V2N(Vehicle to Nomadic Device, 차량-모바일 기기 간 통신), V2P(Vehicle to Pedestrian, 차량-보행자 간 통신)와 같은 V2X 통신할 수 있다. 통신 모듈(110)은 예를 들어, 3G, 4G, 5G. CDMA, GSM, W-CDMA, TD-SCDMA, WiBro, LTE, EPC 등의 공지된 원거리 통신 방법을 채택하여 차량(예: 200_1~N)과 통신할 수 있다. 또는, 통신 모듈(110)은 무선 랜(Wireless LAN), 와이파이(Wi-Fi), 블루투스(Bluetooth), 지그비(Zigbee), WFD(Wi-Fi Direct), UWB(Ultrawideband), 적외선 통신(IrDA; Infrared Data Association), BLE (Bluetooth Low Energy), NFC(Near Field Communication)와 같은 근거리 통신 방법을 채택하여 차량(V)과 통신할 수도 있다.The communication module (110) can support the establishment of a communication channel or a wireless communication channel between the electronic device (100) and another device (e.g., a vehicle), and the performance of communication through the established communication channel. The communication module (110) can perform V2X communication, such as, for example, V2V (vehicle to vehicle, vehicle-to-vehicle communication), V2I (vehicle to infrastructure, vehicle-to-infrastructure communication), V2N (vehicle to Nomadic Device, vehicle-to-mobile device communication), and V2P (vehicle to Pedestrian, vehicle-to-pedestrian communication). The communication module (110) can communicate with a vehicle (e.g., 200_1~N) by adopting a known long-distance communication method, such as, for example, 3G, 4G, 5G, CDMA, GSM, W-CDMA, TD-SCDMA, WiBro, LTE, EPC, etc. Alternatively, the communication module (110) may communicate with the vehicle (V) by adopting a short-range communication method such as wireless LAN, Wi-Fi, Bluetooth, Zigbee, WFD (Wi-Fi Direct), UWB (Ultrawideband), Infrared Data Association (IrDA), BLE (Bluetooth Low Energy), or NFC (Near Field Communication).
메모리(120)는 전자 장치(100)의 적어도 하나의 구성요소(예: 프로세서(130))에 의해 사용되는 다양한 데이터를 저장할 수 있다. 데이터는 예를 들어, 소프트웨어 및 이와 관련된 명령에 대한 입력 데이터 또는 출력 데이터를 포함할 수 있다. 예를 들어, 메모리(120)는 차량 속도 동기화 서비스 제공을 위한 적어도 하나의 인스트럭션을 저장할 수 있다. The memory (120) can store various data used by at least one component (e.g., processor (130)) of the electronic device (100). The data can include, for example, input data or output data for software and commands related thereto. For example, the memory (120) can store at least one instruction for providing a vehicle speed synchronization service.
메모리(120)는 다양한 형태의 휘발성 메모리 또는 비휘발성 메모리를 포함할 수 있다. 예를 들어, 메모리는 ROM(read only memory) 및 RAM(random access memory)를 포함할 수 있다. 본 기재의 실시예에서 메모리는 프로세서의 내부 또는 외부에 위치할 수 있고, 메모리(120)는 이미 알려진 다양한 수단을 통해 프로세서(130)와 연결될 수 있다.The memory (120) may include various forms of volatile memory or nonvolatile memory. For example, the memory may include read only memory (ROM) and random access memory (RAM). In the embodiments of the present disclosure, the memory may be located internally or externally to the processor, and the memory (120) may be connected to the processor (130) through various means already known.
프로세서(130)는 전자 장치(100)의 적어도 하나의 다른 구성요소(예: 하드웨어 또는 소프트웨어 구성요소)를 제어할 수 있고, 다양한 데이터 처리 또는 연산을 수행할 수 있다. 프로세서(130)는 예를 들어, 중앙처리장치(CPU), 그래픽처리장치(GPU), 마이크로프로세서, 애플리케이션 프로세서(application processor), 주문형 반도체(ASIC(application specific integrated circuit), FPGA(field programmable gate arrays)) 중 적어도 하나를 포함할 수 있으며, 복수의 코어를 가질 수 있다.The processor (130) can control at least one other component (e.g., hardware or software component) of the electronic device (100) and perform various data processing or calculations. The processor (130) can include, for example, at least one of a central processing unit (CPU), a graphics processing unit (GPU), a microprocessor, an application processor, an application specific integrated circuit (ASIC), and a field programmable gate array (FPGA), and can have multiple cores.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 복수의 차량들로부터 복수의 차량 위치 정보를 획득할 수 있다. 상기 차량 위치 정보는 차량 식별 정보(ID), 차량 위치 좌표값, 각 차량의 주행 도로에 대한 링크 ID(link ID) 및 각 차량의 주행 차로 번호 중 적어도 하나의 정보를 포함할 수 있다. 이와 관련하여, 프로세서(130)는 기등록된 차량으로부터 복수의 차량 위치 정보를 수신함에 따라, 기등록된 차량에 대해 차량 속도 동기화 서비스를 제공할 수 있다.According to one embodiment, the processor (130) can obtain a plurality of vehicle location information from a plurality of vehicles through the communication module (110). The vehicle location information can include at least one of vehicle identification information (ID), vehicle location coordinate values, link ID for the driving road of each vehicle, and driving lane number of each vehicle. In this regard, the processor (130) can provide a vehicle speed synchronization service for the pre-registered vehicle by receiving a plurality of vehicle location information from the pre-registered vehicle.
일 실시예에 따르면, 프로세서(130)는 복수의 차량 위치 정보에 기반하여 차량들 중 동일한 도로의 같은(동일) 차로에서 주행중인 차량들을 그룹화(grouping)할 수 있다. 프로세서(130)는 차량 위치 정보에서 링크 ID 및 차로 번호를 확인하고, 링크 ID와 차로 번호가 같은 차량을 그룹화할 수 있다.According to one embodiment, the processor (130) may group vehicles driving on the same (same) lane of the same road among the vehicles based on a plurality of vehicle location information. The processor (130) may check the link ID and lane number from the vehicle location information, and group vehicles having the same link ID and lane number.
프로세서(130)는 동일 도로의 동일 차로에서 주행중인 차량들 중에서 선행 차량과의 간격이 제1 지정된 거리 미만인 차량들을 하나의 그룹으로 묶을 수 있다. 상기 제1 지정된 거리는 동일 차로에 주행중인 차량들을 그룹화하여 속도를 제어할지를 결정하는 기준 거리로서, 통상의 차량간 안전거리 이상으로 설정될 수 있다. 상기 제1 지정된 거리는 각 차량에 구비된 센서 또는 운전자의 가시거리에 대응하는 예를 들면, 약 15m일 수 있다. 프로세서(130)에 의한 제1 지정된 거리에 기반한 그룹 통합과 분리에 대해서는 도 7을 참조하여 후술한다.The processor (130) can group vehicles that are driving in the same lane of the same road and have a distance from a preceding vehicle of less than a first designated distance. The first designated distance is a reference distance for determining whether to control the speed by grouping vehicles driving in the same lane, and can be set to be greater than a normal safety distance between vehicles. The first designated distance can be, for example, about 15 m corresponding to a sensor equipped in each vehicle or the driver's visibility. The group integration and separation based on the first designated distance by the processor (130) will be described later with reference to FIG. 7.
일 실시예에 따르면, 프로세서(130)는 차량 위치 정보에 포함된 위치 좌표값에 기반하여 각 차량의 그룹 내 주행 순서를 확인하고, 주행 순서에 따라 순차적으로 그룹 내 차량들에 대한 순번(순서 번호)을 할당할 수 있다. 프로세서(130)는 차량 위치 정보 중 적어도 일부(예: 주행 도로 및 주행 차로), 각 차량 식별 정보 및 그룹 내 순번을 상호 관련하여 메모리(120)에 저장할 수 있다. 이후, 프로세서(130)는 차량 식별 정보와 관련된 그룹 정보와 순번 정보에 기반하여 각 차량이 속하는 그룹, 차량들 중 선두 차량과 후행 차량 및 그룹 내 제어 대상 차량을 구분할 수 있다. 프로세서(130)는 그룹 정보와 순선 정보를 각 차량에 제공(부여)할 수 있고, 자체적인 그룹 관리에만 이용할 수도 있다. 프로세서(130)는 차로 변경이나, 목적지 도착과 같은 다양한 사유로 인해 그룹 내 차량에 변화가 발생하면, 순번을 재할당 및 부여할 수 있다. According to one embodiment, the processor (130) can check the driving order of each vehicle within the group based on the location coordinate value included in the vehicle location information, and sequentially assign a sequence number (order number) to the vehicles within the group according to the driving order. The processor (130) can store at least a part of the vehicle location information (e.g., driving road and driving lane), each vehicle identification information, and the sequence number within the group in relation to each other in the memory (120). Thereafter, the processor (130) can distinguish the group to which each vehicle belongs, the leading vehicle and the following vehicle among the vehicles, and the control target vehicle within the group based on the group information and the sequence information related to the vehicle identification information. The processor (130) can provide (assign) the group information and the sequence information to each vehicle, and can also use them only for its own group management. If a change occurs in the vehicles within the group due to various reasons such as a lane change or arrival at a destination, the processor (130) can reallocate and assign a sequence number.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 각 그룹의 선두 차량에 요청하여, 각 그룹의 선두 차량으로부터 선두 차량의 속도 정보를 획득할 수 있다. 상기 속도 정보는 속도, 가속도, 액셀레이터(accelerator) 상태 및 브레이크(break) 상태 중 적어도 하나의 정보를 포함할 수 있다. According to one embodiment, the processor (130) may obtain speed information of the lead vehicle from the lead vehicle of each group by requesting the lead vehicle of each group through the communication module (110). The speed information may include at least one of information of speed, acceleration, accelerator state, and brake state.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 각 그룹의 선두 차량의 속도 정보를 각 그룹 내 차량들에 제공함에 따라 각 그룹 내 차량들의 속도 제어가 동기화되도록 지원할 수 있다. 예를 들어, 프로세서(130)는 선두 차량의 속도, 가속도, 액셀레이터 상태 및 브레이크 상태 중 적어도 하나의 정보를 동일 그룹에 속하는 차량들(예: 도 3의 200_1~N)에게 송신할 수 있다. According to one embodiment, the processor (130) may support synchronization of speed control of vehicles within each group by providing speed information of the leading vehicle of each group to the vehicles within each group through the communication module (110). For example, the processor (130) may transmit information on at least one of speed, acceleration, accelerator state, and brake state of the leading vehicle to vehicles belonging to the same group (e.g., 200_1 to N of FIG. 3).
이후, 동일 그룹에 속하는 차량들(예: 도 3의 200_1이 선두 차량인 경우, 차량(200_1)의 후행 차량)은 선행 차량과의 안전 거리를 제2 지정된 거리 이상으로 유지하면서, 선두 차량의 속도 및 가속도에 가까워지도록 각 차량의 액셀레이터와 가속 페달을 제어할 수 있다. 상기 제2 지정된 거리는 통상의 안전 거리로 설정될 수 있다. 상기 제2 지정된 거리는 예를 들면, 5m일 수 있다. 상기 제2 지정된 거리는 선두 차량의 출발을 확인한 후 동시에 출발할 수 있는 거리로 설정될 수 있다. 상기 제2 지정된 거리는 각 그룹의 모든 차량에 의해 동일하게 설정될 수 있다. 이와 관련하여, 프로세서(130)는 안전 거리에 대응하는 제2 지정된 거리를 각 그룹 내 차량들에게 공유할 수 있다. 상기 제1 지정된 거리 및 제2 지정된 거리는 고정적으로 설정될 수 있고, 도로 상태(예: 직선 도로, 곡선 도로, 사고 잦은 구간), 기상 상태(우천시), 또는 교통 정보(예: 평균 속도, 제한 속도)에 따라 가변될 수 있다.Thereafter, the vehicles belonging to the same group (e.g., when 200_1 of FIG. 3 is the leading vehicle, the vehicles following the vehicle (200_1)) can control the accelerator and the accelerator pedal of each vehicle to approach the speed and acceleration of the leading vehicle while maintaining a safe distance from the preceding vehicle of a second designated distance or more. The second designated distance can be set to a normal safe distance. The second designated distance can be, for example, 5 m. The second designated distance can be set to a distance at which the vehicles can depart simultaneously after confirming the departure of the leading vehicle. The second designated distance can be set to be the same for all vehicles in each group. In this regard, the processor (130) can share the second designated distance corresponding to the safe distance with the vehicles in each group. The first designated distance and the second designated distance can be fixedly set and can vary depending on road conditions (e.g., straight road, curved road, section with frequent accidents), weather conditions (in case of rain), or traffic information (e.g., average speed, speed limit).
일 실시예에 따르면, 프로세서(130)는 각 그룹 내 차량들로부터 주기적으로 또는 이벤트 동기적으로 차량 위치 정보를 획득 및 모니터링할 수 있다. 예를 들어, 프로세서(130)는 각 그룹 내 차량에서 주기적으로 차량 위치 정보를 획득하되, 차로 번호 또는 링크 ID의 변화와 같은 이벤트 발생 시점에는 지정된 주기와 별개로 차량 위치 정보를 획득할 수 있다. According to one embodiment, the processor (130) may acquire and monitor vehicle location information from vehicles in each group periodically or event-synchronously. For example, the processor (130) may acquire vehicle location information from vehicles in each group periodically, but may acquire vehicle location information separately from a specified period at the time of an event such as a change in a lane number or link ID.
일 실시예에 따르면, 프로세서(130)는 각 그룹에서 획득된 차량 위치 정보에 기반하여 그룹 내 후행 차량이 급격한 속도 변화에 대응하는 지정된 조건에 부합하는지를 확인(또는, 모니터링)할 수 있다. 예를 들어, 프로세서(130)는 해당 후행 차량이 급감속하는 경우, 급정차하는 경우, 또는 차로 변경하는 경우 중 적어도 하나의 경우에 지정된 조건에 부합하는 것으로 결정할 수 있다.According to one embodiment, the processor (130) may determine (or monitor) whether a following vehicle within a group meets a specified condition corresponding to a sudden change in speed based on vehicle location information acquired from each group. For example, the processor (130) may determine that the specified condition is met in at least one of cases where the following vehicle suddenly decelerates, suddenly stops, or changes lanes.
프로세서(130)는 지정된 조건에 부합하는 후행 차량을 확인하면, 확인된 차량보다 늦은 순번 차량(확인된 차량의 이후 주행 차량)에 확인된 차량의 속도 정보를 제공할 수 있다. 이 경우, 확인된 차량의 속도 정보를 수신한 후행 차량들은 제공받은 속도 정보에 따라 급감속 또는 급정차를 수행하거나, 차로 변경과 같은 회피 제어를 수행할 수 있다.When the processor (130) identifies a following vehicle that meets a specified condition, it can provide speed information of the identified vehicle to a vehicle with a later order than the identified vehicle (a vehicle driving after the identified vehicle). In this case, the following vehicles that have received speed information of the identified vehicle can perform rapid deceleration or rapid stop, or perform avoidance control such as lane change, according to the speed information provided.
일 실시예에 따르면, 프로세서(130)는 차량 위치 정보에 기반하여 그룹 내 비정상 정지 차량을 확인하면, 확인된 정지 차량을 기준으로 대상 그룹을 재구성할 수 있다. 상기 비정상 정지 차량은 예를 들면, 신호 대기나, 교통 체증과 같은 안전거리 확보를 위한 정지 이외에 사유(예: 고장)로 그 선행 차량과 제3 지정된 거리 이상 이격된 상태로 정지한 차량일 수 있다. 상기 제3 지정된 거리는 제2 지정된 거리를 초과하도록 설정될 수 있다. 이와 관련하여, 비정상 정지 차량은 비정상 정지 상태를 확인하면, 전자 장치(100)에 비상 상황 정보(예: 사고 유형 정보)를 송신할 수 있다. 그러면, 전자 장치(100)는 비정상 정지 차량의 사고 수습을 위한 후속 조치(예: 견인차 호출)를 수행할 수 있다.According to one embodiment, when the processor (130) identifies an abnormally stopped vehicle within a group based on vehicle location information, the processor (130) may reconstruct the target group based on the identified stopped vehicle. The abnormally stopped vehicle may be, for example, a vehicle that has stopped at a distance greater than a third specified distance from the preceding vehicle due to a reason (e.g., breakdown) other than a stop for securing a safe distance, such as waiting for a signal or traffic congestion. The third specified distance may be set to exceed the second specified distance. In this regard, when the abnormally stopped vehicle identifies an abnormally stopped state, the electronic device (100) may transmit emergency situation information (e.g., accident type information). Then, the electronic device (100) may perform follow-up measures (e.g., calling a tow truck) for accident recovery of the abnormally stopped vehicle.
예를 들어, 프로세서(130)는 비정상 정지 차량을 확인하면, 통신 모듈(110)을 통해 비정상 정지 차량의 그룹 내 후행 차량에 차로 변경 요청을 송신할 수 있다. 프로세서(130)는 그룹 내 후행 차량의 옆 차로에 다른 그룹이 존재하는지를 확인하고, 다른 그룹이 존재하면 다른 그룹 내 비정상 정지 차량의 후행 차량에 대해 감속 요청을 송신할 수 있다. 그러면, 감속 요청에 따라 다른 그룹 내 감속한 차량이 발생하고, 상기 그룹 내 후행 차량은 감속한 차량에 의해 생겨난 공간으로 끼어들기를 수행할 수 있다. For example, when the processor (130) identifies an abnormally stopped vehicle, it can transmit a lane change request to a following vehicle within the group of the abnormally stopped vehicle through the communication module (110). The processor (130) can check whether another group exists in the lane next to the following vehicle within the group, and if another group exists, it can transmit a deceleration request to a following vehicle within the other group of the abnormally stopped vehicle. Then, a decelerated vehicle within the other group occurs according to the deceleration request, and the following vehicle within the group can cut into the space created by the decelerated vehicle.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 각 그룹 내 적어도 하나의 차량으로부터 다른 차로로 차로 변경 요청을 획득할 수 있다. 프로세서(130)는 차로 변경 요청을 획득하면, 다른 차로에 기구성된 다른 그룹이 존재하는지 여부를 확인할 수 있다. 프로세서(130)는 다른 차로에 다른 그룹이 존재하면, 다른 그룹 내 적어도 하나의 차량에 대해 뒤에 위치하는 차량들에 대해 감속 요청을 제공(예: 송신)할 수 있다. 이후, 감속 요청에 따라 다른 그룹 내 감속한 차량이 발생하고, 차로 변경 요청한 차량은 감속한 차량에 의해 생겨난 공간으로 끼어들기를 수행할 수 있다.According to one embodiment, the processor (130) may obtain a lane change request from at least one vehicle in each group to another lane through the communication module (110). When the processor (130) obtains the lane change request, it may check whether another group configured in another lane exists. If another group exists in another lane, the processor (130) may provide (e.g., transmit) a deceleration request to vehicles located behind at least one vehicle in the other group. Thereafter, a decelerating vehicle in another group occurs according to the deceleration request, and the vehicle requesting the lane change may cut into the space created by the decelerating vehicle.
일 실시예에 따르면, 프로세서(130)는 차량 위치 정보에 기반하여 각 그룹에서 다른 차량들과 주행 도로와 차로가 달라진 차량 또는 차로 변경을 시도하는 차량을 확인하면, 확인된 차량을 해당 그룹에서 제외할 수 있다. 예를 들어, 프로세서(130)는 각 그룹 내 차량들 중 교통 신호로 인하여 선행 차량과 분리된 차량을 확인하면, 해당 차량을 이전 그룹에서 분리할 수 있다. 이후, 프로세서(130)는 해당 차량을 해당 차량의 후행 차량과 그룹화할 수 있다. 다른 예를 들어, 프로세서(130)는 각 그룹 내 차량들 중 차로 변경한 차량에 대해서 이전 차로의 그룹에서 제외하고 변경된 차로에서 그룹화할 수 있다.According to one embodiment, the processor (130) may, based on vehicle location information, identify a vehicle in each group that has changed lanes or is attempting to change lanes, and may exclude the identified vehicle from the group. For example, if the processor (130) identifies a vehicle separated from a preceding vehicle due to a traffic signal among the vehicles in each group, the processor (130) may separate the vehicle from the previous group. Thereafter, the processor (130) may group the vehicle with the vehicle following the vehicle. As another example, the processor (130) may exclude a vehicle that has changed lanes among the vehicles in each group from the group of the previous lane and group the vehicle in the changed lane.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 복수의 차량들로부터 경로 정보를 더 획득하고, 경로 정보에 기반하여 각 차량들의 노선에 따라 그룹을 달리 구성할 수 있다. 예를 들어, 프로세서(130)는 경로 정보에 기반하여 직진과 좌(또는, 우)회전이 가능한 일 차로에서 신호 대기중인 어느 그룹 내 차량들 중에서 직진하는 차량과 좌(또는, 우)회전하는 차량을 구분할 수 있다. 프로세서(130)는 경로 정보에 기반하여 직진하는 차량들을 제1 그룹을 구성하고, 좌(또는, 우)회전하는 차량들을 제2 그룹으로 구성할 수 있다. According to one embodiment, the processor (130) may obtain additional route information from a plurality of vehicles through the communication module (110), and may configure different groups according to the routes of each vehicle based on the route information. For example, the processor (130) may distinguish between vehicles going straight and vehicles turning left (or right) among vehicles in a group waiting for a signal in a single lane where going straight and turning left (or right) are possible based on the route information. The processor (130) may configure vehicles going straight as a first group, and vehicles turning left (or right) as a second group based on the route information.
일 실시예에 따르면, 프로세서(130)는 통신 모듈(110)을 통해 각 그룹 내 차량들로부터 교통 정보(예: 전방 신호등 정보)를 더 획득하고, 획득된 교통 정보 중 적어도 일부를 각 그룹 내 차량들에게 제공할 수 있다. 예를 들어, 프로세서(130)는 각 그룹 내 선두 차량으로부터 교통 정보를 획득하고, 획득된 교통 정보를 그룹 내 후행 차량에 제공할 수 있다. 이 경우, 후행 차량은 교통 정보에 기반하여 선두 차량의 주행 제어를 예측할 수 있다.According to one embodiment, the processor (130) may obtain additional traffic information (e.g., front traffic light information) from vehicles within each group through the communication module (110) and provide at least some of the obtained traffic information to the vehicles within each group. For example, the processor (130) may obtain traffic information from a leading vehicle within each group and provide the obtained traffic information to a following vehicle within the group. In this case, the following vehicle may predict the driving control of the leading vehicle based on the traffic information.
이와 같이, 일 실시예에 따른 전자 장치(100)는 같은 차로에 있는 모든 차량들이 기차처럼 동기화되어 운행되도록, 속도와 가속도(및 제2 지정된 거리)를 동기화함에 따라 불필요한 판단 시간을 줄여서 교통 체증을 완화할 수 있다. 세부적으로, 일 실시예에 따른 전자 장치(100)는 V2X 통신을 통해 같은 차로에 주행하고 있는 차량들을 동적으로 그룹화하여 관리하고, 선두 차량의 속도를 그룹 내 공유하여 후행 차량의 가/감속을 동기화함에 따라 종래의 속도 변화에 따른 교통 체증을 완화할 수 있다.In this way, the electronic device (100) according to one embodiment can reduce unnecessary judgment time by synchronizing speed and acceleration (and a second designated distance) so that all vehicles in the same lane run in synchronization like a train, thereby alleviating traffic congestion. Specifically, the electronic device (100) according to one embodiment can dynamically group and manage vehicles running in the same lane through V2X communication, and share the speed of the leading vehicle within the group to synchronize the acceleration/deceleration of the following vehicle, thereby alleviating traffic congestion caused by conventional speed changes.
뿐만 아니라, 일 실시예에 따른 전자 장치(100)는 급감속, 급정차 또는 비정상 정지 발생 시에 대상 차량의 후행 차량에 변화된 속도 정보를 공유하여 후행 차량의 안전하게 제동하여 연쇄추돌사고가 나지 않도록 방지할 수 있고, 상황에 따라 후행 차량의 차로 변경을 지원할 수 있어 주행 판단 시간과 교통 체증을 개선할 수 있다.In addition, the electronic device (100) according to one embodiment can share changed speed information with a vehicle following the target vehicle when sudden deceleration, sudden stop, or abnormal stop occurs, thereby safely braking the vehicle following the target vehicle to prevent a chain collision accident, and can support lane change of the vehicle following the target vehicle depending on the situation, thereby improving driving decision time and traffic congestion.
또한, 일 실시예에 따른 전자 장치(100)는 차량들을 경로 정보, 교통 신호, 차로 변경에 따라 그룹을 분리 또는 통합함에 따라 교통 흐름에 동적으로 적응할 수 있어, 교통 체증의 해소에 더욱 유리할 수 있다. In addition, the electronic device (100) according to one embodiment can dynamically adapt to traffic flow by separating or integrating groups of vehicles according to route information, traffic signals, and lane changes, which can be more advantageous in relieving traffic congestion.
이하, 도 5 내지 8를 참조하여 일 실시예에 따른 그룹 구성을 세부적으로 설명한다. Hereinafter, a group configuration according to one embodiment will be described in detail with reference to FIGS. 5 to 8.
도 5 및 도 6은 일 실시예에 따른 차량 속도 동기화의 예시이고, 도 7a 및 도 7b은 일 실시예에 따른 차량 그룹 통합 또는 분리의 예이다. FIGS. 5 and 6 are examples of vehicle speed synchronization according to one embodiment, and FIGS. 7a and 7b are examples of vehicle group integration or separation according to one embodiment.
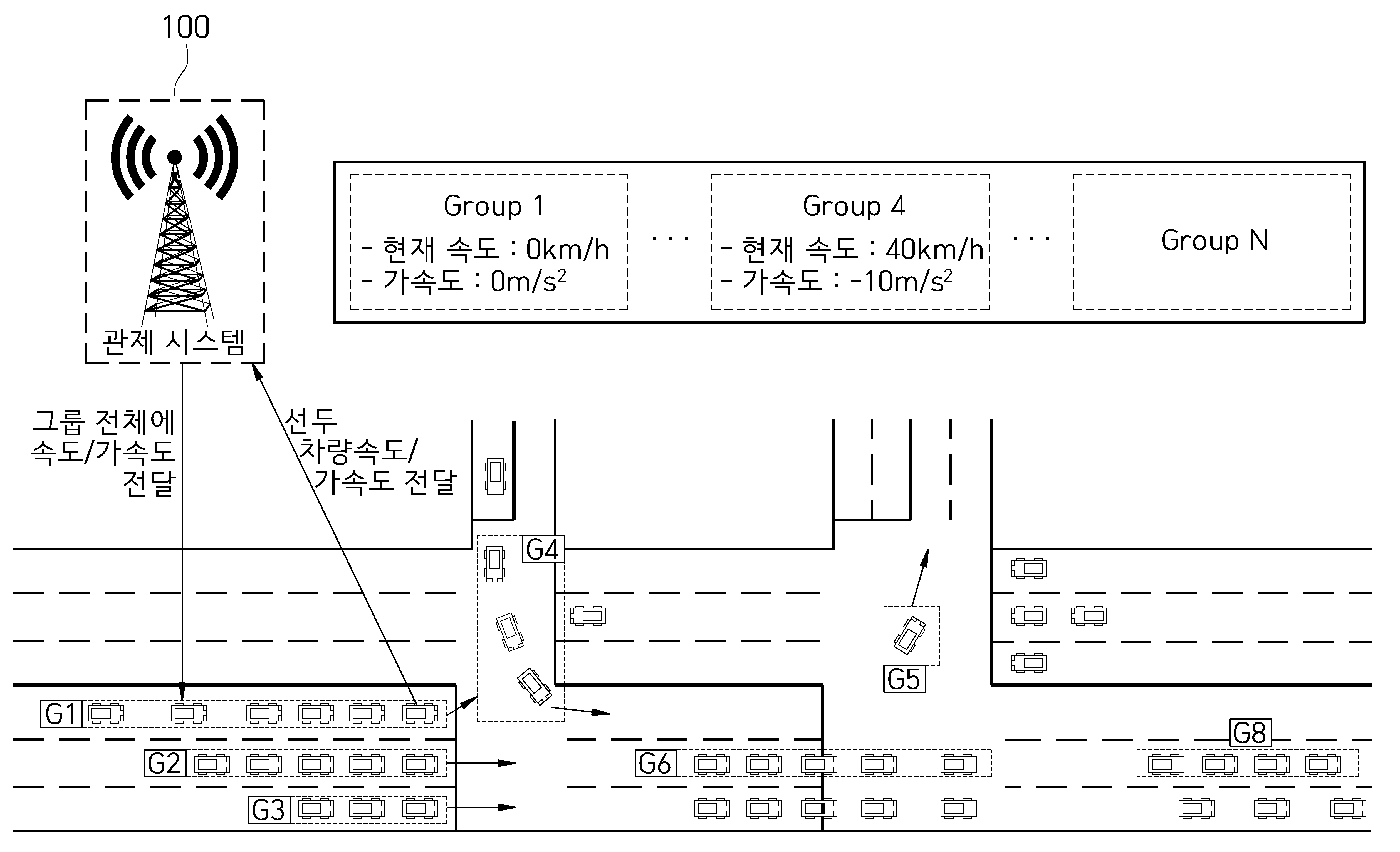
도 5를 참조하면, 일 실시예에 따른 전자 장치(100)(예: 도 4의 프로세서(130))는 동일한 차로에 위치하는 차량을 각기 그룹화함에 따라 복수의 그룹(G1 내지 G8)을 구성할 수 있다. Referring to FIG. 5, an electronic device (100) (e.g., processor (130) of FIG. 4) according to one embodiment may configure a plurality of groups (G1 to G8) by grouping vehicles located in the same lane.
일 실시예에 따르면, 전자 장치(100)는 그룹별 선두 차량으로부터 속도와 가속도를 전달받고, 해당 속도와 가속도를 해당 그룹 전체에 제공할 수 있다. 그 결과, 예를 들어, "Group 1(G1)"은 "속도는 0 km/h, 가속도는 0 m/s2"인 속도 정보로 동기화되고, "Group 4(G4)"는 "속도는 40 km/h, 가속도는 -10 m/s2"인 속도 정보로 동기화될 수 있다. According to one embodiment, the electronic device (100) can receive speed and acceleration from the leading vehicle of each group and provide the speed and acceleration to the entire group. As a result, for example, "Group 1 (G1)" can be synchronized with speed information of "speed is 0 km/h, acceleration is 0 m/s2", and "Group 4 (G4)" can be synchronized with speed information of "speed is 40 km/h, acceleration is -10 m/s2".
도 6을 참조하면, 각 그룹 내의 차량(예: 도 3의 200_1~N)들은 차간 안전거리를 제2 지정된 거리로 확보한 상태에서 전자 장치(100)로부터 제공된 속도/가속도를 동기화하여 주행할 수 있다. 그에 따라, 동기화된 그룹 내 차량은 안전거리를 확보한 상태로 선두 차량의 속도에 동기화되어 주행할 수 있다. 예를 들어, 제1 차로 그릅 내 차량들은 선두 차량의 속도에 따라 20km/h 속도로 동기화되고, 제2 차로 그릅 내 차량들은 선두 차량의 속도에 따라 50km/h 속도로 동기화되고, 제3 차로 그릅 내 차량들은 차량들은 선두 차량의 속도에 따라 80km/h 속도로 동기화되어 주행할 수 있다.Referring to FIG. 6, the vehicles in each group (e.g., 200_1 to N in FIG. 3) can drive by synchronizing the speed/acceleration provided from the electronic device (100) while securing the inter-vehicle safety distance as the second designated distance. Accordingly, the vehicles in the synchronized group can drive while synchronizing with the speed of the leading vehicle while securing the safety distance. For example, the vehicles in the first lane group can be synchronized at a speed of 20 km/h according to the speed of the leading vehicle, the vehicles in the second lane group can be synchronized at a speed of 50 km/h according to the speed of the leading vehicle, and the vehicles in the third lane group can be synchronized at a speed of 80 km/h according to the speed of the leading vehicle.
도 7a 및 7b을 참조하면, 일 실시예에 따른 전자 장치(100)는 차량 위치 정보에 기반하여 이미 구성된 그룹의 선두 차량이거나 새롭게 확인된 대상 차량(710)에 선행(하는) 그룹의 차량들(예: 720)이 존재하면, 대상 차량(710)과 선행 그룹의 가장 뒤 차량(가장 늦은 순번 차량)(720)과의 간격에 기반하여 대상 차량(710)의 그룹을 결정할 수 있다. Referring to FIGS. 7A and 7B , an electronic device (100) according to one embodiment may determine the group of a target vehicle (710) based on the distance between the target vehicle (710) and the last vehicle (latest vehicle) (720) of the preceding group, if there are vehicles (e.g., 720) in a group that is a leading vehicle of an already configured group or a newly identified target vehicle (710) based on vehicle location information.
도 7a와 같이, 예를 들어, 대상 차량(710)과 선행 그룹의 가장 늦은 순번 차량(720) 간의 간격(d)이 제1 지정된 거리(th1) 미만이면, 전자 장치(100)는 대상 차량(710)을 선행 그룹에 포함시킬 수 있다.As in FIG. 7a, for example, if the distance (d) between the target vehicle (710) and the latest vehicle in the preceding group (720) is less than the first designated distance (th 1 ), the electronic device (100) may include the target vehicle (710) in the preceding group.
반면, 도 7b와 같이, 예를 들어, 대상 차량(710)과 선행 그룹의 가장 늦은 순번 차량(720) 간의 간격(d)이 제1 지정된 거리(th1) 이상이면, 전자 장치(100)는 대상 차량(710)을 선행 그룹(730)에 포함시키지 않고, 대상 차량(710)의 후행 차량이 존재하는 경우, 대상 차량(710)을 선두 차량으로 하여 새로운 그룹(740)을 구성할 수 있다. On the other hand, as in FIG. 7b, for example, if the distance (d) between the target vehicle (710) and the latest vehicle in the preceding group (720) is greater than or equal to the first designated distance (th 1 ), the electronic device (100) may not include the target vehicle (710) in the preceding group (730), and if there is a vehicle following the target vehicle (710), may form a new group (740) with the target vehicle (710) as the leading vehicle.
도 8은 일 실시예에 따른 차로 변경 상황의 차량 그룹 제어 예이다. Fig. 8 is an example of vehicle group control in a lane change situation according to one embodiment.
도 8을 참조하면, 일 실시예에 따르면, 제1 차량(810)은 경로 정보에 기반하여 차로 변경이 필요한 것을 확인하고, 다른 차로로의 차로 변경 요청을 전자 장치(100)에 송신할 수 있다. Referring to FIG. 8, according to one embodiment, the first vehicle (810) may determine that a lane change is necessary based on route information and transmit a lane change request to another lane to the electronic device (100).
일 실시예에 따르면, 전자 장치(100)는 차로 변경 요청을 획득하면, 다른 차로에 다른 그룹이 존재하는지 여부를 확인할 수 있다. 다른 그룹(820)이 존재하면, 전자 장치(100)는 확인된 다른 그룹(820) 내 제1 차량(810)의 후행 차량들(820B)에 대해 감속 요청을 제공(예: 송신)할 수 있다. 감속 요청에 따라 다른 그룹 내 후행 차량들(820B)이 감속하고, 제1 차량(810)은 후행 차량들(820B)의 감속으로 인해 생겨난 공간으로 끼어들기를 수행할 수 있다. According to one embodiment, when the electronic device (100) obtains a lane change request, it can check whether another group exists in another lane. If another group (820) exists, the electronic device (100) can provide (e.g., transmit) a deceleration request to the following vehicles (820B) of the first vehicle (810) in the identified other group (820). According to the deceleration request, the following vehicles (820B) in the other group decelerate, and the first vehicle (810) can cut into the space created by the deceleration of the following vehicles (820B).
일 실시예에 따르면, 전자 장치(100)는 제1 차량(810)의 선행 차량들(820A)에 대해서는 가속 요청을 제공할 수 있다. 다른 그룹 내 제1 차량(810)의 선행 차량(820A)은 가속 요청에 따라 가속하여 제1 차량(810)이 끼어들 공간이 더 빨리 생길 수 있다. 이와 관련하여, 전자 장치(100)는 다른 그룹(820)의 선두 차량과 그 선행 차량 간의 간격을 확인하고, 가속 요청 여부를 결정할 수 있다.In one embodiment, the electronic device (100) may provide an acceleration request to the preceding vehicles (820A) of the first vehicle (810). The preceding vehicles (820A) of the first vehicle (810) in the other group may accelerate in response to the acceleration request so that a space for the first vehicle (810) to cut in may be created sooner. In this regard, the electronic device (100) may check the gap between the leading vehicle of the other group (820) and its preceding vehicle and determine whether to request acceleration.
이와 같이, 일 실시예에 따른 전자 장치(100)는 주행 경로, 사고 발생 등에 따라 차로 변경이 수행된 경우, 관련 차량에 대하여 끼워들 공간을 제공하거나, 다른 그룹 합류를 지원할 수 있다.In this way, the electronic device (100) according to one embodiment can provide space for a related vehicle to squeeze in or support joining another group when a lane change is performed due to a driving route, an accident, etc.
도 9는 일 실시예에 따른 차량 속도 동기화 방법의 흐름도를 나타낸다.Figure 9 shows a flow chart of a vehicle speed synchronization method according to one embodiment.
도 9를 참조하면, 동작 910에서, 전자 장치(100)는 V2X 통신을 통해 복수의 차량들로부터 복수의 차량 위치 정보를 획득할 수 있다. 상기 차량 위치 정보는 차량 식별 정보, 차량 위치 좌표값, 링크 ID 및 차로 번호를 포함할 수 있다.Referring to FIG. 9, in
동작 920에서, 전자 장치(100)는 복수의 차량 위치 정보에 기반하여 복수의 차량들 중 동일 도로의 동일 차로에서 주행중인 차량들을 그룹화할 수 있다. 예를 들어, 전자 장치(100)는 차량 위치 정보에 포함된 링크 ID 및 차로 번호에 기반하여 동일한 도로의 동일 차로에서 주행중인 차량을 확인할 수 있다.In
동작 930에서, 전자 장치(100)는 각 그룹에서 선두 차량의 속도 정보를 획득할 수 있다. 전자 장치(100)는 차량 위치 정보에 포함된 위치 좌표값에 기반하여 선두 차량을 확인하고, 선두 차량에 요청하여 선두 차량의 속도 정보를 획득할 수 있다. 상기 속도 정보는 속도, 가속도, 액셀레이터(accelerator) 상태 및 브레이크(break) 상태 중 적어도 하나의 정보를 포함할 수 있다.In
동작 940에서, 전자 장치(100)는 각 그룹 내 차량들의 속도 제어가 동기화되도록, 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공할 수 있다. 이후, 동일 그룹에 속하는 차량들(예: 도 3의 200_1~200_N))은 선행 차량과의 안전 거리를 제2 지정된 거리 이상으로 유지하면서, 선두 차량의 속도 및 가속도에 가까워지도록 차량의 액셀레이터와 가속 페달을 제어할 수 있다.In
이와 같이, 일 실시예에 따른 전자 장치(100)는 동일 차로를 주행하는 차량들을 그룹화하여 관리함에 따라 그룹 내 차량들이 같은 속도 및 같은 안전 거리를 유지하면서 기차처럼 동기화 주행하도록 지원함에 따라, 차량 운전자들이 다른 운전자의 차량 제어 형태를 알지 못하여 교통 체증을 가중되는 문제를 개선할 수 있다. In this way, the electronic device (100) according to one embodiment manages vehicles driving on the same lane by grouping them, thereby supporting vehicles within the group to drive synchronously like a train while maintaining the same speed and the same safety distance, thereby improving the problem of traffic congestion aggravated by vehicle drivers not knowing the vehicle control patterns of other drivers.
도 10은 일 실시예에 따른 차량 속도 동기화 방법의 세부 흐름도를 나타낸다.Figure 10 shows a detailed flowchart of a vehicle speed synchronization method according to one embodiment.
도 10을 참조하면, 전자 장치(100)는 차량 위치 정보에 기반하여 대상 차량의 차로 변경을 확인하면, 동작 1005에서, 대상 차량의 경로 정보에 기반하여 목적지 도착 여부를 확인할 수 있다. 대상 차량이 목적지에 도착한 것으로 확인하면, 동작 1010에서, 전자 장치(100)는 목적지에 도착한 대상 차량을 기존 그룹에서 제외할 수 있다.Referring to FIG. 10, if the electronic device (100) determines that the target vehicle has changed lanes based on vehicle location information, in
전자 장치(100)는 동작 1005에서, 대상 차량이 목적지에 도착하지 않은 상태인 것으로 확인하면, 동작 1015에서, 대상 차량에 앞서는 선행 그룹이 있는지를 확인할 수 있다. If the electronic device (100) determines in
전자 장치(100)는 동작 1015에서, 대상 차량에 앞서는 선행 그룹이 있는 것을 확인하면, 동작 1020에서, 전자 장치(100)는 대상 차량을 선행 그룹에 포함할 수 있다. If the electronic device (100) determines in
동작 1025에서, 전자 장치(100)는 선두 차량의 속도 정보를 대상 차량에 제공할 수 있다. 그러면, 동작 1030에서, 대상 차량은 그 선행 차량과 제2 지정된 거리 이상 안전거리를 유지하면서 선두 차량과 속도 및 가속도를 동기화할 수 있다. At
동작 1035에서, 전자 장치(100)는 경로 정보에 기반하여 대상 차량의 경로(예: 차로)가 변경된 경우, 1005 동작을 수행할 수 있다.In
전자 장치(100)는 동작 1015에서, 대상 차량에 앞서는 선행 그룹이 없는 것을 확인하면, 동작 1040에서, 전자 장치(100)는 대상 차량을 새로운 그룹의 선두 차량으로 지정하고, 대상 차량에 속도 정보 요청을 송신할 수 있다. 그에 따라, 전자 장치(100)는 대상 차량의 후행 차량에 대한 순번을 변경하여 할당할 수 있다. If the electronic device (100) determines in
동작 1045에서, 대상 차량은 그에 응답하여 그의 속도 정보를 전자 장치(100)로 송신하고, 전자 장치(100)는 대상 차량의 속도 정보를 획득할 수 있다. 전자 장치(100)는 대상 차량의 속도 정보를 새로운 그룹 내 차량들에게 공유할 수 있다.In
동작 1050에서, 대상 장치는 목적지에 도달하면 전자 장치(100)로 그룹 탈퇴 요청(또는, 경로 정보)을 송신할 수 있다. 그러면, 전자 장치(100)는 그룹 탈퇴 요청을 수신하고, 그에 응답하여 경로 동작 1005를 수행할 수 있다. In
이와 같이, 일 실시예에 따른 전자 장치(100)는 차량의 차로 변경, 목적지 도착 여부, 주행 차로(또는, 차로) 내 다른 그룹 존재 여부, 선두 차량 여부와 같은 다양한 조건에 따라 속도 동기화를 위한 그룹을 동적으로 관리할 수 있다.In this way, the electronic device (100) according to one embodiment can dynamically manage groups for speed synchronization according to various conditions such as whether the vehicle has changed lanes, whether the destination has been reached, whether there are other groups in the driving lane (or lane), and whether there is a leading vehicle.
도 11은 일 실시예에 따른 속도 공유 방법을 구현하기 위한 차량 시스템을 나타낸 구성도이다.Fig. 11 is a block diagram showing a vehicle system for implementing a speed sharing method according to one embodiment.
도 11을 참조하면, 차량 시스템(1000)(예: 도 3의 차량(200_N))은, 버스(1070)를 통해 통신하는 프로세서(1010), 메모리(1030), 입력 인터페이스 장치(1050), 출력 인터페이스 장치(1060) 및 저장 장치(1040) 중 적어도 하나를 포함할 수 있다. 컴퓨터 시스템(1000)은 또한 네트워크에 결합된 통신 장치(1020)를 더 포함할 수 있다. 프로세서(1010)는 중앙 처리 장치(central processing unit, CPU)이거나, 또는 메모리(1030) 또는 저장 장치(1040)에 저장된 명령을 실행하는 반도체 장치일 수 있다. 메모리(1030) 및 저장 장치(1040)는 다양한 형태의 휘발성 또는 비휘발성 저장 매체를 포함할 수 있다. 예를 들어, 메모리는 ROM(read only memory) 및 RAM(random access memory)를 포함할 수 있다. 본 기재의 실시예에서 메모리는 프로세서의 내부 또는 외부에 위치할 수 있고, 메모리는 이미 알려진 다양한 수단을 통해 프로세서와 연결될 수 있다. 메모리는 다양한 형태의 휘발성 또는 비휘발성 저장 매체이며, 예를 들어, 메모리는 읽기 전용 메모리(read-only memory, ROM) 또는 랜덤 액세스 메모리(random access memory, RAM)를 포함할 수 있다.Referring to FIG. 11, a vehicle system (1000) (e.g., vehicle (200_N) of FIG. 3) may include at least one of a processor (1010), a memory (1030), an input interface device (1050), an output interface device (1060), and a storage device (1040) communicating via a bus (1070). The computer system (1000) may further include a communication device (1020) coupled to a network. The processor (1010) may be a central processing unit (CPU), or a semiconductor device that executes instructions stored in the memory (1030) or the storage device (1040). The memory (1030) and the storage device (1040) may include various forms of volatile or nonvolatile storage media. For example, the memory may include a read only memory (ROM) and a random access memory (RAM). In embodiments of the present disclosure, the memory may be located internally or externally to the processor, and the memory may be connected to the processor via various means known in the art. The memory may be a variety of volatile or nonvolatile storage media, and for example, the memory may include read-only memory (ROM) or random access memory (RAM).
본 문서의 다양한 실시예들 및 이에 사용된 용어들은 본 문서에 기재된 기술적 특징들을 특정한 실시예들로 한정하려는 것이 아니며, 해당 실시예의 다양한 변경, 균등물, 또는 대체물을 포함하는 것으로 이해되어야 한다. 도면의 설명과 관련하여, 유사한 또는 관련된 구성요소에 대해서는 유사한 참조 부호가 사용될 수 있다. 아이템에 대응하는 명사의 단수 형은 관련된 문맥상 명백하게 다르게 지시하지 않는 한, 상기 아이템 한 개 또는 복수 개를 포함할 수 있다. 본 문서에서, "A 또는 B", "A 및 B 중 적어도 하나",“A 또는 B 중 적어도 하나”, "A, B 또는 C", "A, B 및 C 중 적어도 하나” 및 “A, B, 또는 C 중 적어도 하나"와 같은 문구들 각각은 그 문구들 중 해당하는 문구에 함께 나열된 항목들 중 어느 하나, 또는 그들의 모든 가능한 조합을 포함할 수 있다. "제1", "제2", 또는 "첫째" 또는 "둘째"와 같은 용어들은 단순히 해당 구성요소를 다른 해당 구성요소와 구분하기 위해 사용될 수 있으며, 해당 구성요소들을 다른 측면(예: 중요성 또는 순서)에서 한정하지 않는다. 어떤(예: 제1) 구성요소가 다른(예: 제2) 구성요소에, “기능적으로” 또는 “통신적으로”라는 용어와 함께 또는 이런 용어 없이, “커플드” 또는 “커넥티드”라고 언급된 경우, 그것은 상기 어떤 구성요소가 상기 다른 구성요소에 직접적으로(예: 유선으로), 무선으로, 또는 제3 구성요소를 통하여 연결될 수 있다는 것을 의미한다.The various embodiments of this document and the terminology used herein are not intended to limit the technical features described in this document to specific embodiments, but should be understood to encompass various modifications, equivalents, or substitutes of the embodiments. In connection with the description of the drawings, similar reference numerals may be used for similar or related components. The singular form of a noun corresponding to an item may include one or more of the items, unless the context clearly indicates otherwise. In this document, each of the phrases "A or B", "at least one of A and B", "at least one of A or B", "A, B, or C", "at least one of A, B, and C", and "at least one of A, B, or C" may include any one of the items listed together in the corresponding phrase, or all possible combinations thereof. Terms such as "first", "second", or "first" or "second" may be used simply to distinguish the corresponding component from other corresponding components, and do not limit the corresponding components in any other respect (e.g., importance or order). When a component (e.g., a first component) is referred to as being “coupled” or “connected” to another component (e.g., a second component), with or without the terms “functionally” or “communicatively,” it means that the component can be connected to the other component directly (e.g., wired), wirelessly, or through a third component.
본 문서에서 사용된 용어 "모듈"은 하드웨어, 소프트웨어 또는 펌웨어로 구현된 유닛을 포함할 수 있으며, 예를 들면, 로직, 논리 블록, 부품, 또는 회로와 같은 용어와 상호 호환적으로 사용될 수 있다. 모듈은, 일체로 구성된 부품 또는 하나 또는 그 이상의 기능을 수행하는, 상기 부품의 최소 단위 또는 그 일부가 될 수 있다. 예를 들면, 일실시예에 따르면, 모듈은 ASIC(application-specific integrated circuit)의 형태로 구현될 수 있다.The term "module" as used in this document may include a unit implemented in hardware, software or firmware, and may be used interchangeably with terms such as logic, logic block, component, or circuit, for example. A module may be an integrally configured component or a minimum unit of the component or a portion thereof that performs one or more functions. For example, according to one embodiment, a module may be implemented in the form of an application-specific integrated circuit (ASIC).
본 문서의 다양한 실시예들은 기기(machine)(예: 전자 장치) 의해 읽을 수 있는 저장 매체(storage medium)(예: 도 4의 메모리(120))(예: 내장 메모리 또는 외장 메모리)에 저장된 하나 이상의 명령어들을 포함하는 소프트웨어(예: 프로그램)로서 구현될 수 있다. 예를 들면, 기기(예: 전자 장치(100))의 프로세서(예: 프로세서(130)는, 저장 매체로부터 저장된 하나 이상의 명령어들 중 적어도 하나의 명령을 호출하고, 그것을 실행할 수 있다. 이것은 기기가 상기 호출된 적어도 하나의 명령어에 따라 적어도 하나의 기능을 수행하도록 운영되는 것을 가능하게 한다. 상기 하나 이상의 명령어들은 컴파일러에 의해 생성된 코드 또는 인터프리터에 의해 실행될 수 있는 코드를 포함할 수 있다. 기기로 읽을 수 있는 저장매체는, 비일시적(non-transitory) 저장매체의 형태로 제공될 수 있다. 여기서, ‘비일시적’은 저장매체가 실재(tangible)하는 장치이고, 신호(signal)(예: 전자기파)를 포함하지 않는다는 것을 의미할 뿐이며, 이 용어는 데이터가 저장매체에 반영구적으로 저장되는 경우와 임시적으로 저장되는 경우를 구분하지 않는다.Various embodiments of this document may be implemented as software (e.g., a program) including one or more commands stored in a storage medium (e.g., a memory (120) of FIG. 4) (e.g., an internal memory or an external memory) readable by a machine (e.g., an electronic device). For example, a processor (e.g., processor (130)) of a device (e.g., electronic device (100)) can call at least one command from among one or more commands stored from a storage medium and execute it. This enables the device to operate to perform at least one function according to the called at least one command. The one or more commands may include code generated by a compiler or code executable by an interpreter. The storage medium readable by the device may be provided in the form of a non-transitory storage medium. Here, ‘non-transitory’ only means that the storage medium is a tangible device and does not include a signal (e.g., electromagnetic wave), and this term does not distinguish between cases where data is stored semi-permanently and cases where it is stored temporarily in the storage medium.
일실시예에 따르면, 본 문서에 개시된 다양한 실시예들에 따른 방법은 컴퓨터 프로그램 제품(computer program product)에 포함되어 제공될 수 있다. 컴퓨터 프로그램 제품은 상품으로서 판매자 및 구매자 간에 거래될 수 있다. 컴퓨터 프로그램 제품은 기기로 읽을 수 있는 저장 매체(예: compact disc read only memory (CD-ROM))의 형태로 배포되거나, 또는 어플리케이션 스토어(예: 플레이 스토어TM)를 통해 또는 두개의 사용자 장치들(예: 스마트폰들) 간에 직접, 온라인으로 배포(예: 다운로드 또는 업로드)될 수 있다. 온라인 배포의 경우에, 컴퓨터 프로그램 제품의 적어도 일부는 제조사의 서버, 어플리케이션 스토어의 서버, 또는 중계 서버의 메모리와 같은 기기로 읽을 수 있는 저장 매체에 적어도 일시 저장되거나, 임시적으로 생성될 수 있다.According to one embodiment, the method according to various embodiments disclosed in the present document may be provided as included in a computer program product. The computer program product may be traded between a seller and a buyer as a commodity. The computer program product may be distributed in the form of a machine-readable storage medium (e.g., a compact disc read only memory (CD-ROM)), or may be distributed online (e.g., downloaded or uploaded) via an application store (e.g., Play Store TM ) or directly between two user devices (e.g., smartphones). In the case of online distribution, at least a part of the computer program product may be at least temporarily stored or temporarily generated in a machine-readable storage medium, such as a memory of a manufacturer's server, a server of an application store, or an intermediary server.
본 문서의 다양한 실시예에 따른 구성 요소들은 소프트웨어 또는 DSP(digital signal processor), FPGA(Field Programmable Gate Array) 또는 ASIC(Application Specific Integrated Circuit)와 같은 하드웨어 형태로 구현될 수 있으며, 소정의 역할들을 수행할 수 있다. '구성 요소들'은 소프트웨어 또는 하드웨어에 한정되는 의미는 아니며, 각 구성 요소는 어드레싱할 수 있는 저장 매체에 있도록 구성될 수도 있고 하나 또는 그 이상의 프로세서들을 재생시키도록 구성될 수도 있다. 일 예로서 구성 요소는 소프트웨어 구성 요소들, 객체지향 소프트웨어 구성 요소들, 클래스 구성 요소들 및 태스크 구성 요소들과 같은 구성 요소들과, 프로세스들, 함수들, 속성들, 프로시저들, 서브루틴들, 프로그램 코드의 세그먼트들, 드라이버들, 펌웨어, 마이크로 코드, 회로, 데이터, 데이터베이스, 데이터 구조들, 테이블들, 어레이들 및 변수들을 포함할 수 있다. Components according to various embodiments of this document may be implemented in the form of software or hardware such as a digital signal processor (DSP), a field programmable gate array (FPGA), or an application specific integrated circuit (ASIC), and may perform predetermined roles. The 'components' are not limited to software or hardware, and each component may be configured to be in an addressable storage medium and may be configured to play one or more processors. As an example, the components may include components such as software components, object-oriented software components, class components, and task components, and processes, functions, properties, procedures, subroutines, segments of program code, drivers, firmware, microcode, circuits, data, databases, data structures, tables, arrays, and variables.
다양한 실시예들에 따르면, 상기 기술한 구성요소들의 각각의 구성요소(예: 모듈 또는 프로그램)는 단수 또는 복수의 개체를 포함할 수 있다. 다양한 실시예들에 따르면, 전술한 해당 구성요소들 중 하나 이상의 구성요소들 또는 동작들이 생략되거나, 또는 하나 이상의 다른 구성요소들 또는 동작들이 추가될 수 있다. 대체적으로 또는 추가적으로, 복수의 구성요소들(예: 모듈 또는 프로그램)은 하나의 구성요소로 통합될 수 있다. 이런 경우, 통합된 구성요소는 상기 복수의 구성요소들 각각의 구성요소의 하나 이상의 기능들을 상기 통합 이전에 상기 복수의 구성요소들 중 해당 구성요소에 의해 수행되는 것과 동일 또는 유사하게 수행할 수 있다. 다양한 실시예들에 따르면, 모듈, 프로그램 또는 다른 구성요소에 의해 수행되는 동작들은 순차적으로, 병렬적으로, 반복적으로, 또는 휴리스틱하게 실행되거나, 상기 동작들 중 하나 이상이 다른 순서로 실행되거나, 생략되거나, 또는 하나 이상의 다른 동작들이 추가될 수 있다.According to various embodiments, each component (e.g., a module or a program) of the above-described components may include a single or multiple entities. According to various embodiments, one or more of the components or operations of the above-described components may be omitted, or one or more other components or operations may be added. Alternatively or additionally, a plurality of components (e.g., a module or a program) may be integrated into a single component. In such a case, the integrated component may perform one or more functions of each of the components of the plurality of components identically or similarly to those performed by the corresponding component of the plurality of components prior to the integration. According to various embodiments, the operations performed by the module, program or other component may be executed sequentially, in parallel, repeatedly, or heuristically, or one or more of the operations may be executed in a different order, omitted, or one or more other operations may be added.
Claims (10)
복수의 차량들에 대한 통신 채널을 제공하는 통신 모듈; 및
상기 통신 모듈과 기능적으로 연결된 프로세서를 포함하고, 상기 프로세서는,
상기 통신 모듈을 통해 상기 복수의 차량들로부터 복수의 경로 정보 및 복수의 차량 위치 정보를 획득하고, 상기 차량 위치 정보는, 각 차량들이 주행중인 차로 번호를 포함하고,
상기 복수의 경로 정보 및 상기 복수의 차량 위치 정보에 기반하여 상기 복수의 차량들 중 동일 도로의 동일 차로에서 주행중이고 선행 차량과의 간격이 제1 지정된 거리 미만인 차량들을 그룹화하고,
상기 통신 모듈을 통해 각 그룹에서 선두 차량의 속도 정보를 획득하고, 상기 각 그룹 내 차량들의 속도 제어가 동기화되도록, 상기 통신 모듈을 통해 상기 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공하고,
상기 각 그룹 내 차량들의 속도 제어를 동기화하는 것은,
상기 각 그룹 내 차량들이 그 선행 차량과의 거리를 상기 제1 지정된 거리 미만의 같은 안전 거리로 유지하면서 상기 선두 차량의 속도 및 가속도에 가장 가까워지도록 상기 각 차량들의 액셀레이터와 가속 페달을 제어하는 것이고,
상기 제1 지정된 거리는, 도로 조건, 기상 상태 및 교통 정보에 따라 가변되고,
상기 복수의 차량 위치 정보에 기반하여 상기 각 그룹 내 속도 변화가 급격한 속도 변화에 대응하는 지정된 조건에 부합하는 후행 차량이 있는지를 확인하고,
상기 확인된 후행 차량의 이후 차량에 상기 확인된 후행 차량의 속도 정보를 제공하는 것인 전자 장치.In electronic devices,
A communication module providing a communication channel for multiple vehicles; and
A processor functionally connected to the above communication module, the processor comprising:
Obtaining multiple route information and multiple vehicle location information from the multiple vehicles through the above communication module, and the vehicle location information includes the lane number in which each vehicle is driving,
Based on the above plurality of route information and the above plurality of vehicle location information, among the above plurality of vehicles, vehicles driving in the same lane of the same road and having a distance from the preceding vehicle less than a first specified distance are grouped,
Through the communication module, the speed information of the leading vehicle in each group is obtained, and the speed information of the leading vehicle is provided to the vehicles in each group through the communication module so that the speed control of the vehicles in each group is synchronized.
Synchronizing the speed control of vehicles within each group above is done by:
Controlling the accelerator and accelerator pedal of each vehicle so that the vehicles in each group maintain a distance from the preceding vehicle of the same safety distance less than the first designated distance, and get closest to the speed and acceleration of the leading vehicle;
The above first designated distance may vary depending on road conditions, weather conditions and traffic information.
Based on the above plurality of vehicle location information, it is determined whether there is a following vehicle within each group that meets the specified conditions corresponding to a rapid speed change,
An electronic device that provides speed information of the identified following vehicle to a vehicle following the identified following vehicle.
상기 각 그룹 내 차량들에 그룹 정보 및 순번 정보를 부여하고 상기 그룹 정보 및 상기 순번 정보에 따라 상기 각 차량들이 속하는 그룹과 상기 각 그룹 내 순번을 관리하는 것인 전자 장치.In claim 1, the processor,
An electronic device that assigns group information and sequence information to vehicles within each group and manages the group to which each vehicle belongs and the sequence within each group based on the group information and sequence information.
상기 선두 차량으로부터 전방 신호등 정보를 포함하는 교통 정보를 더 획득하고,
상기 교통 정보를 상기 각 그룹 내 차량들에 제공하는 것인 전자 장치.In claim 1, the processor,
Obtain further traffic information including front traffic light information from the above leading vehicle,
An electronic device that provides the above traffic information to vehicles within each group.
상기 선두 차량의 속도, 가속도, 액셀레이터(accelerator) 상태 및 브레이크(break) 상태 중 적어도 하나의 정보를 포함하는 것인 전자 장치.In claim 1, the acquired speed information of the leading vehicle is,
An electronic device comprising at least one piece of information among speed, acceleration, accelerator status, and brake status of the lead vehicle.
상기 선두 차량에 선행하는 다른 그룹의 차량들이 존재하는 경우, 상기 선두 차량과 상기 다른 그룹의 가장 후행 차량 간의 간격에 기반하여 그룹을 통합 또는 분리하여 구성하는 것인 전자 장치.In claim 1, the processor,
An electronic device that, when there are other groups of vehicles preceding the lead vehicle, configures groups by integrating or separating them based on the gap between the lead vehicle and the last vehicle of the other groups.
상기 복수의 차량 위치 정보에 기반하여 상기 각 그룹 내 차량들 중 비정상 정지 차량을 확인하면, 상기 비정상 정지 차량의 후행 차량에 사고 발생으로 인한 차로 변경 요청을 제공하는 것인 전자 장치.In claim 1, the processor,
An electronic device that identifies an abnormally stopped vehicle among the vehicles in each group based on the plurality of vehicle location information and provides a lane change request to the vehicle following the abnormally stopped vehicle due to an accident.
상기 통신 모듈을 통해 상기 각 그룹 내 적어도 하나의 차량으로부터 다른 차로로 차로 변경 요청을 획득하면, 상기 다른 차로에 다른 그룹이 존재하는지를 확인하고,
상기 확인된 다른 그룹 내 상기 적어도 하나의 차량에 대해 후행 차량들에 대해 속도 조절 요청을 제공하는 것인 전자 장치.In claim 1, the processor,
When a lane change request to another lane is obtained from at least one vehicle in each group through the above communication module, it is checked whether another group exists in the other lane,
An electronic device providing a speed control request to following vehicles for at least one vehicle within the identified other group.
상기 복수의 차량 위치 정보에 기반하여 상기 각 그룹 내 차량들 중 다른 차량들과 주행 도로와 차로가 달라진 차량 또는 차로 변경을 시도하는 대상 차량을 확인하면, 상기 확인된 대상 차량을 해당 그룹에서 제외하는 것인 전자 장치.In claim 1, the processor,
An electronic device that, based on the plurality of vehicle location information, identifies a vehicle among the vehicles in each group that has changed driving roads and lanes or is attempting to change lanes, and excludes the identified target vehicle from the group.
복수의 차량들로부터 복수의 경로 정보 및 복수의 차량 위치 정보를 획득하는 동작; 상기 차량 위치 정보는, 각 차량들이 주행중인 차로 번호를 포함하고,
상기 복수의 경로 정보 및 상기 복수의 차량 위치 정보에 기반하여 상기 복수의 차량들 중 동일 도로의 동일 차로에서 주행중이고 선행 차량과의 간격이 제1 지정된 거리 미만인 차량들을 그룹화하는 동작;
각 그룹에서 선두 차량의 속도 정보를 획득하는 동작; 및
상기 각 그룹 내 차량들의 속도 제어가 동기화되도록, 상기 선두 차량의 속도 정보를 상기 각 그룹 내 차량들에 제공하는 동작을 포함하고,
상기 각 그룹 내 차량들의 속도 제어를 동기화하는 것은,
상기 각 그룹 내 차량들이 각기 그 선행 차량과의 거리를 상기 제1 지정된 거리 미만의 같은 안전 거리로 유지하면서 상기 선두 차량의 속도 및 가속도에 가장 가까워지도록 상기 각 차량들의 액셀레이터와 가속 페달을 제어하는 것이고,
상기 제1 지정된 거리는, 도로 조건, 기상 상태 및 교통 정보에 따라 가변되고,
상기 복수의 차량 위치 정보에 기반하여 상기 각 그룹 내 속도 변화가 급격한 속도 변화에 대응하는 지정된 조건에 부합하는 후행 차량이 있는지를 확인하는 동작;
상기 확인된 후행 차량의 이후 차량에 상기 확인된 후행 차량의 속도 정보를 제공하는 동작을 더 포함하는 것인 차량 속도 동기화 방법.In a method for synchronizing vehicle speed by an electronic device,
An operation of obtaining multiple route information and multiple vehicle location information from multiple vehicles; the vehicle location information includes the lane number in which each vehicle is driving,
An operation of grouping vehicles among the plurality of vehicles that are driving in the same lane of the same road and have a distance from a preceding vehicle less than a first specified distance based on the plurality of route information and the plurality of vehicle location information;
An operation to obtain speed information of the leading vehicle in each group; and
Including an operation of providing speed information of the lead vehicle to the vehicles in each group so that the speed control of the vehicles in each group is synchronized,
Synchronizing the speed control of vehicles within each group above is done by:
Controlling the accelerator and accelerator pedal of each vehicle so that the vehicles in each group maintain the same safe distance from the preceding vehicle less than the first designated distance and get closest to the speed and acceleration of the leading vehicle.
The above first designated distance may vary depending on road conditions, weather conditions and traffic information.
An operation of determining whether there is a following vehicle within each group whose speed change satisfies a specified condition corresponding to a rapid speed change based on the plurality of vehicle location information;
A vehicle speed synchronization method further comprising an action of providing speed information of the identified following vehicle to a subsequent vehicle of the identified following vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/KR2023/011675 WO2024035075A1 (en) | 2022-08-08 | 2023-08-08 | Electronic device and vehicle speed synchronization method therefor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020220098514 | 2022-08-08 | ||
| KR20220098514 | 2022-08-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20240020696A KR20240020696A (en) | 2024-02-15 |
| KR102739314B1 true KR102739314B1 (en) | 2024-12-05 |
Family
ID=89899324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020230103373A Active KR102739314B1 (en) | 2022-08-08 | 2023-08-08 | Electronic device and the method for synchronizing vehicle speed |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102739314B1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100256836A1 (en) * | 2009-04-06 | 2010-10-07 | Gm Global Technology Operations, Inc. | Autonomous vehicle management |
| JP2011250021A (en) * | 2010-05-25 | 2011-12-08 | Toyota Infotechnology Center Co Ltd | Vehicle group managing method and arrayed vehicle running communication system |
| US20170011633A1 (en) * | 2015-07-08 | 2017-01-12 | Magna Electronics Inc. | Lane change system for platoon of vehicles |
| US10921810B2 (en) * | 2016-08-02 | 2021-02-16 | Pcms Holdings, Inc. | System and method for optimizing autonomous vehicle capabilities in route planning |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10073464B2 (en) * | 2016-12-30 | 2018-09-11 | Bendix Commercial Vehicle Systems Llc | Varying the distance between vehicles in a platoon |
| KR102406507B1 (en) * | 2017-03-27 | 2022-06-10 | 현대자동차주식회사 | Apparatus for controlling autonomous vehicle based on deep learning, system having the same and method thereof |
| KR102417906B1 (en) * | 2017-12-11 | 2022-07-07 | 현대자동차주식회사 | Apparatus and method for controlling platooning of leading vehicle |
| KR102417905B1 (en) * | 2017-12-11 | 2022-07-07 | 현대자동차주식회사 | Apparatus and method for controlling platooning of leading vehicle |
-
2023
- 2023-08-08 KR KR1020230103373A patent/KR102739314B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100256836A1 (en) * | 2009-04-06 | 2010-10-07 | Gm Global Technology Operations, Inc. | Autonomous vehicle management |
| JP2011250021A (en) * | 2010-05-25 | 2011-12-08 | Toyota Infotechnology Center Co Ltd | Vehicle group managing method and arrayed vehicle running communication system |
| US20170011633A1 (en) * | 2015-07-08 | 2017-01-12 | Magna Electronics Inc. | Lane change system for platoon of vehicles |
| US10921810B2 (en) * | 2016-08-02 | 2021-02-16 | Pcms Holdings, Inc. | System and method for optimizing autonomous vehicle capabilities in route planning |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240020696A (en) | 2024-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12449809B2 (en) | Systems and methods for evaluating and sharing autonomous vehicle driving style information with proximate vehicles | |
| US9824583B2 (en) | Vehicle-to-vehicle and traffic signal-to-vehicle traffic control system | |
| US11657710B2 (en) | Device and method for controlling vehicle | |
| US9773411B2 (en) | Vehicle-to-vehicle and traffic signal-to-vehicle communication system | |
| KR20190105150A (en) | Apparatus and method for controlling vehicle platooning | |
| GB2547972A (en) | Autonomous vehicle emergency operating mode | |
| US20220111823A1 (en) | Emergency braking control method for vehicle | |
| US20200339125A1 (en) | Method for operating a driving assistance system, and driving assistance system | |
| KR101190835B1 (en) | System for accident prevention in crossroad and method thereof | |
| KR102767292B1 (en) | Vehicle control system using reliablility of input signal for autonomous vehicle | |
| KR20210147827A (en) | Driving control method by cluster group formation of automatic driving vehicle | |
| KR102855122B1 (en) | Method for controlling platooning and apparatus thereof | |
| JP2018202902A (en) | Auto cruise system | |
| JP7087451B2 (en) | Driving support device | |
| KR102739314B1 (en) | Electronic device and the method for synchronizing vehicle speed | |
| CN110979277B (en) | Rear-end collision prevention system and method based on front vehicle state | |
| CN117184059A (en) | Emergency obstacle avoidance control method and system for vehicle | |
| KR20240060071A (en) | method and device for test evaluation of autonomous car driving | |
| JP2009176221A (en) | Driving assistance device | |
| KR20250022744A (en) | Method for controlling platooning | |
| KR102801421B1 (en) | Apparatus for Controlling Remote Vehicles According to Priority and Method Thereof | |
| KR20250055050A (en) | Apparatus for autonomous driving and the method for switching minimun risk condition | |
| WO2024035075A1 (en) | Electronic device and vehicle speed synchronization method therefor | |
| KR102636669B1 (en) | Dangerous section notification device on the driving route of a vehicle using driving information and a vehicle including the same | |
| WO2015041594A1 (en) | Method and system for improved traffic safety when driving a vehicle in a safety- critical area |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20230808 |
|
| PA0201 | Request for examination | ||
| PA0302 | Request for accelerated examination |
Patent event date: 20230829 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination Patent event date: 20230808 Patent event code: PA03021R01I Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20231227 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20240624 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20241121 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20241202 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20241203 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |