KR102274167B1 - 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 - Google Patents
로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 Download PDFInfo
- Publication number
- KR102274167B1 KR102274167B1 KR1020190109922A KR20190109922A KR102274167B1 KR 102274167 B1 KR102274167 B1 KR 102274167B1 KR 1020190109922 A KR1020190109922 A KR 1020190109922A KR 20190109922 A KR20190109922 A KR 20190109922A KR 102274167 B1 KR102274167 B1 KR 102274167B1
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- posture
- surgical
- operable
- marker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2/4603—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof
- A61F2/461—Special tools for implanting artificial joints for insertion or extraction of endoprosthetic joints or of accessories thereof of knees
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1684—Tracking a line or surface by means of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2068—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis using pointers, e.g. pointers having reference marks for determining coordinates of body points
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/254—User interfaces for surgical systems being adapted depending on the stage of the surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3904—Markers, e.g. radio-opaque or breast lesions markers specially adapted for marking specified tissue
- A61B2090/3916—Bone tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/30—Joints
- A61F2/46—Special tools for implanting artificial joints
- A61F2002/4632—Special tools for implanting artificial joints using computer-controlled surgery, e.g. robotic surgery
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Robotics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Gynecology & Obstetrics (AREA)
- Radiology & Medical Imaging (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Transplantation (AREA)
- Physical Education & Sports Medicine (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Manipulator (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따른 위치 가이드 장치의 제어블록도이다.
도 3은 본 발명의 일 실시예에 따른 수술 대상체 정합부의 동작을 설명하기 위한 도면이다.
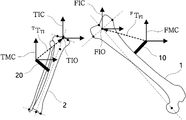
도 4는 본 발명의 일 실시예에 따른 로봇 정합부의 동작을 설명하기 위한 도면이다.
도 5는 본 발명의 일 실시예에 따른 수술 영역 확인부의 동작을 설명하기 위한 도면이다.
도 6은 본 발명의 일 실시예에 따른 GUI 생성부가 생성한 가이드정보의 일 예를 도시한 것이다.
도 7은 본 발명의 일 실시예에 따른 로봇 위치 가이드 장치에 의한 위치 가이드 방법을 설명하기 위한 흐름도이다.
Claims (12)
- 로봇의 위치 가이드 장치에 있어서,
수술 대상체에 부착된 대상체 마커를 포함하는 영상을 수술 전 수술 대상체에 관한 수술대상영상과 정합하여 상기 수술 대상체에 부착된 대상체 마커와 상기 수술 대상체 간의 위치 및 자세에 관한 상관관계를 도출하는 수술 대상체 정합부;
수술 로봇에 부착된 로봇 마커를 포함하는 영상에 기초하여 상기 로봇 마커와 상기 수술 로봇 간의 위치 및 자세에 관한 상관관계를 도출하고, 상기 로봇 마커와 기 설정된 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 로봇 정합부;
상기 대상체 마커와 상기 로봇 마커의 위치 및 자세정보에 기초하여 상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 수술 영역 확인부;
상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세의 상관관계에 관한 가이드정보를 그래픽으로 생성하는 GUI 생성부; 및
상기 가이드정보를 영상으로 표시하는 디스플레이부를 포함하고;
상기 수술 가능 영역은 수술 가능 자세 영역과 수술 가능 위치 영역을 포함하고;
상기 가이드정보는 상기 수술 대상체의 자세가 수술 가능 자세 영역에 속하는지 여부를 나타내는 제1 메뉴화면과, 상기 수술 대상체의 위치가 수술 가능 위치 영역에 속하는지 여부를 나타내는 제2 메뉴화면을 포함하는 것을 특징으로 하는 로봇의 위치 가이드 장치.
- 삭제
- 제1항에 있어서,
상기 가이드정보는 상기 수술 대상체의 위치와 상기 수술 가능 영역 간의 이격 거리 정보를 포함하는 것을 특징으로 하는 로봇의 위치 가이드 장치.
- 삭제
- 제3항에 있어서,
상기 제2 메뉴화면에서 상기 수술 대상체의 위치는, 상기 수술 대상체에 관해 미리 계획된 수술 경로에 기초하여, 상기 수술 대상체에서 상기 수술 경로의 원점을 기준으로 상기 수술 경로에 포함되는 영역을 포함하여 표현되는 것을 특징으로 하는 로봇의 위치 가이드 장치.
- 제5항에 있어서,
상기 수술 가능 영역은 상기 수술 로봇의 위치 및 자세정보에 기초하여 산출되고;
상기 수술 가능 위치 영역은 수술 가능 영역의 원점을 기준으로 일정한 볼륨을 갖도록 형성되며, 상기 수술 가능 자세 영역은 상기 로봇의 자세에 기초하여 결정되는 것을 특징으로 하는 로봇의 위치 가이드 장치.
- 로봇의 위치 가이드 시스템에 있어서,
수술 로봇에 부착한 로봇 마커와 수술 대상체에 부착된 대상체 마커의 위치와 자세를 추적하기 위한 추적기;
수술 전 획득한 수술 대상체에 관한 수술대상영상을 저장하는 메모리부;
상기 수술대상영상에 기초하여 상기 수술 대상체에 부착된 상기 대상체 마커와 상기 수술 대상체 간의 위치 및 자세에 관한 상관관계를 도출하는 수술 대상체 정합부;
상기 로봇 마커와 상기 수술 로봇 간의 위치 및 자세에 관한 상관관계를 도출하고, 상기 로봇 마커와 기 설정된 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 로봇 정합부;
상기 추적기에 의해 획득된 상기 대상체 마커와 상기 로봇 마커의 위치 및 자세정보에 기초하여 상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 수술 영역 확인부;
상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세의 상관관계에 관한 가이드정보를 그래픽으로 생성하는 GUI 생성부; 및
상기 가이드정보를 영상으로 표시하는 디스플레이부를 포함하고;
상기 수술 가능 영역은 수술 가능 자세 영역과 수술 가능 위치 영역을 포함하고;
상기 가이드정보는 상기 수술 대상체의 자세가 수술 가능 자세 영역에 속하는지 여부를 나타내는 제1 메뉴화면과, 상기 수술 대상체의 위치가 수술 가능 위치 영역에 속하는지 여부를 나타내는 제2 메뉴화면을 포함하는 것을 특징으로 하는 로봇의 위치 가이드 시스템.
- 로봇의 위치 가이드 방법에 있어서,
수술 대상체에 부착된 대상체 마커를 포함하는 영상을 수술 전 수술 대상체에 관한 수술대상영상과 정합하여 상기 수술 대상체에 부착된 대상체 마커와 상기 수술 대상체 간의 위치 및 자세에 관한 상관관계를 도출하는 단계;
수술 로봇에 부착된 로봇 마커를 포함하는 영상에 기초하여 상기 로봇 마커와 상기 수술 로봇 간의 위치 및 자세에 관한 상관관계를 도출하고, 상기 로봇 마커와 기 설정된 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 단계;
상기 대상체 마커와 상기 로봇 마커의 위치 및 자세정보에 기초하여 상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 단계; 및
상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세의 상관관계에 관한 가이드정보를 그래픽으로 생성하여 영상으로 표시하는 단계를 포함하고;
상기 수술 가능 영역은 수술 가능 자세 영역과 수술 가능 위치 영역을 포함하고;
상기 가이드정보는 상기 수술 대상체의 자세가 수술 가능 자세 영역에 속하는지 여부를 나타내는 제1 메뉴화면과, 상기 수술 대상체의 위치가 수술 가능 위치 영역에 속하는지 여부를 나타내는 제2 메뉴화면을 포함하는 로봇의 위치 가이드 방법.
- 로봇의 위치 가이드 방법에 있어서,
수술 로봇에 부착된 로봇 마커를 포함하는 영상에 기초하여 상기 로봇 마커와 상기 수술 로봇 간의 위치 및 자세에 관한 상관관계를 도출하고, 상기 로봇 마커와 기 설정된 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 단계;
수술 대상체에 부착된 대상체 마커를 포함하는 영상을 수술 전 수술 대상체에 관한 수술대상영상과 정합하여 상기 수술 대상체에 부착된 대상체 마커와 상기 수술 대상체 간의 위치 및 자세에 관한 상관관계를 도출하는 단계;
상기 대상체 마커와 상기 로봇 마커의 위치 및 자세정보에 기초하여 상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세에 관한 상관관계를 도출하는 단계; 및
상기 수술 대상체와 상기 수술 가능 영역 간의 위치 및 자세의 상관관계에 관한 가이드정보를 그래픽으로 생성하여 영상으로 표시하는 단계를 포함하고;
상기 수술 가능 영역은 수술 가능 자세 영역과 수술 가능 위치 영역을 포함하고;
상기 가이드정보는 상기 수술 대상체의 자세가 수술 가능 자세 영역에 속하는지 여부를 나타내는 제1 메뉴화면과, 상기 수술 대상체의 위치가 수술 가능 위치 영역에 속하는지 여부를 나타내는 제2 메뉴화면을 포함하는 로봇의 위치 가이드 방법.
- 삭제
- 제8항 또는 제9항에 있어서,
상기 제2 메뉴화면에서 상기 수술 대상체의 위치는, 상기 수술 대상체에 관해 미리 계획된 수술 경로에 기초하여, 상기 수술 대상체에서 상기 수술 경로의 원점을 기준으로 상기 수술 경로에 포함되는 영역을 포함하여 표현되는 것을 특징으로 하는 로봇의 위치 가이드 방법.
- 제8항 또는 제9항에 있어서,
상기 수술 가능 영역은, 상기 수술 로봇의 위치 및 자세정보에 기초하여 산출되고;
상기 수술 가능 위치 영역은 수술 가능 영역의 원점을 기준으로 일정한 볼륨을 갖도록 형성되며, 상기 수술 가능 자세 영역은 상기 로봇의 자세에 기초하여 결정되는 것을 특징으로 하는 로봇의 위치 가이드 방법.
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190109922A KR102274167B1 (ko) | 2019-09-05 | 2019-09-05 | 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 |
| JP2022513627A JP7341567B2 (ja) | 2019-09-05 | 2020-09-03 | ロボットの位置ガイド装置、及びそれを含むシステム |
| US17/640,509 US11666392B2 (en) | 2019-09-05 | 2020-09-03 | Device for guiding position of robot, method therefor, and system including the same |
| EP20860074.2A EP4026509A4 (en) | 2019-09-05 | 2020-09-03 | ROBOT POSITION GUIDANCE DEVICE, ASSOCIATED METHOD AND SYSTEM COMPRISING THE SAME |
| CN202080062005.0A CN114364333B (zh) | 2019-09-05 | 2020-09-03 | 用于引导机器人位置的装置、方法和包括该装置的系统 |
| PCT/KR2020/011895 WO2021045546A2 (ko) | 2019-09-05 | 2020-09-03 | 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190109922A KR102274167B1 (ko) | 2019-09-05 | 2019-09-05 | 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210029322A KR20210029322A (ko) | 2021-03-16 |
| KR102274167B1 true KR102274167B1 (ko) | 2021-07-12 |
Family
ID=74852140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190109922A Active KR102274167B1 (ko) | 2019-09-05 | 2019-09-05 | 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11666392B2 (ko) |
| EP (1) | EP4026509A4 (ko) |
| JP (1) | JP7341567B2 (ko) |
| KR (1) | KR102274167B1 (ko) |
| CN (1) | CN114364333B (ko) |
| WO (1) | WO2021045546A2 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024128704A1 (ko) * | 2022-12-12 | 2024-06-20 | 큐렉소 주식회사 | 수술로봇의 수술 가능 영역 생성 장치 및 방법 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102301863B1 (ko) * | 2020-02-12 | 2021-09-16 | 큐렉소 주식회사 | 수술 대상체의 정합 확인방법, 그 장치 및 이를 포함하는 시스템 |
| CN115697239A (zh) * | 2020-06-03 | 2023-02-03 | 柯惠Lp公司 | 外科机器人系统用户界面 |
| TWI790181B (zh) * | 2022-08-03 | 2023-01-11 | 國立陽明交通大學 | 手術機器人系統 |
| KR20240041681A (ko) * | 2022-09-23 | 2024-04-01 | 큐렉소 주식회사 | 수술 로봇의 절삭 경로 플래닝 장치 및 그 방법 |
| KR20240142083A (ko) * | 2023-03-21 | 2024-09-30 | 주식회사 코렌텍 | 수술 보조 로보틱 시스템 및 그를 통한 자세제어 방법 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8644907B2 (en) | 1999-10-28 | 2014-02-04 | Medtronic Navigaton, Inc. | Method and apparatus for surgical navigation |
| EP3470040B1 (en) * | 2005-02-22 | 2022-03-16 | Mako Surgical Corp. | Haptic guidance system and method |
| US8311611B2 (en) | 2007-04-24 | 2012-11-13 | Medtronic, Inc. | Method for performing multiple registrations in a navigated procedure |
| KR100998182B1 (ko) | 2008-08-21 | 2010-12-03 | (주)미래컴퍼니 | 수술용 로봇의 3차원 디스플레이 시스템 및 그 제어방법 |
| KR102274277B1 (ko) * | 2013-03-13 | 2021-07-08 | 스트리커 코포레이션 | 수술 절차들을 위한 준비시 수술실에 대상들을 배치하는 시스템 |
| WO2014198796A1 (en) * | 2013-06-11 | 2014-12-18 | Minmaxmedical | System for positioning a surgical device |
| DE102014219477B4 (de) * | 2014-09-25 | 2018-06-21 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Chirurgierobotersystem |
| KR102296451B1 (ko) | 2014-12-08 | 2021-09-06 | 큐렉소 주식회사 | 중재시술 로봇용 공간정합 시스템 |
| WO2017117369A1 (en) * | 2015-12-31 | 2017-07-06 | Stryker Corporation | System and methods for performing surgery on a patient at a target site defined by a virtual object |
| KR20180113512A (ko) * | 2016-02-26 | 2018-10-16 | 씽크 써지컬, 인크. | 로봇의 사용자 위치설정을 안내하는 방법 및 시스템 |
| CN110786819B (zh) * | 2016-03-30 | 2022-07-26 | 索尼公司 | 手术成像系统 |
| KR101817438B1 (ko) * | 2016-09-13 | 2018-01-11 | 재단법인대구경북과학기술원 | 고관절 전치환술을 위한 수술 항법 시스템 |
| WO2018112028A1 (en) * | 2016-12-16 | 2018-06-21 | Mako Surgical Corp. | Techniques for detecting errors or loss of accuracy in a surgical robotic system |
| US10499997B2 (en) * | 2017-01-03 | 2019-12-10 | Mako Surgical Corp. | Systems and methods for surgical navigation |
| CA3076625A1 (en) * | 2017-09-27 | 2019-04-04 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US11154369B2 (en) * | 2018-01-24 | 2021-10-26 | Think Surgical, Inc. | Environmental mapping for robotic assisted surgery |
| US11612438B2 (en) * | 2018-09-05 | 2023-03-28 | Point Robotics Medtech Inc. | Navigation system and method for medical operation by a robotic system using a tool |
| IL281716B2 (en) * | 2018-09-27 | 2025-05-01 | Quantum Surgical | A medical robot that includes automatic positioning devices |
| US11986246B2 (en) * | 2019-06-25 | 2024-05-21 | Think Surgical, Inc. | Method to determine bone placement in a robot workspace |
| WO2021257681A1 (en) * | 2020-06-19 | 2021-12-23 | Smith & Nephew, Inc. | Robotic arm positioning and movement control |
-
2019
- 2019-09-05 KR KR1020190109922A patent/KR102274167B1/ko active Active
-
2020
- 2020-09-03 US US17/640,509 patent/US11666392B2/en active Active
- 2020-09-03 CN CN202080062005.0A patent/CN114364333B/zh active Active
- 2020-09-03 JP JP2022513627A patent/JP7341567B2/ja active Active
- 2020-09-03 WO PCT/KR2020/011895 patent/WO2021045546A2/ko unknown
- 2020-09-03 EP EP20860074.2A patent/EP4026509A4/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024128704A1 (ko) * | 2022-12-12 | 2024-06-20 | 큐렉소 주식회사 | 수술로봇의 수술 가능 영역 생성 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4026509A4 (en) | 2023-08-30 |
| WO2021045546A2 (ko) | 2021-03-11 |
| CN114364333A (zh) | 2022-04-15 |
| JP7341567B2 (ja) | 2023-09-11 |
| JP2022545743A (ja) | 2022-10-28 |
| US20220265364A1 (en) | 2022-08-25 |
| KR20210029322A (ko) | 2021-03-16 |
| CN114364333B (zh) | 2024-08-20 |
| WO2021045546A3 (ko) | 2021-04-29 |
| US11666392B2 (en) | 2023-06-06 |
| EP4026509A2 (en) | 2022-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102274167B1 (ko) | 로봇의 위치 가이드 장치, 이의 방법 및 이를 포함하는 시스템 | |
| US11844574B2 (en) | Patient-specific preoperative planning simulation techniques | |
| US11850010B2 (en) | Workflow systems and methods for enhancing collaboration between participants in a surgical procedure | |
| KR102488295B1 (ko) | 로봇 수술 절차 동안 물리적 오브젝트를 식별하고 추적하기 위한 시스템 및 방법 | |
| KR102794946B1 (ko) | 가상 객체에 의해 정의된 타깃 부위에서 환자에게 수술을 수행하기 위한 시스템 및 방법 | |
| US20210052348A1 (en) | An Augmented Reality Surgical Guidance System | |
| US20200246081A1 (en) | Augmented reality navigation systems for use with robotic surgical systems and methods of their use | |
| EP2001390B1 (en) | System for 3-d tracking of surgical instrument in relation to patient body | |
| US20220061921A1 (en) | Surgical object tracking template generation for computer assisted navigation during surgical procedure | |
| JP2016512084A (ja) | 仮想制約境界を確立するシステム及び方法 | |
| EP3200719B1 (en) | Determining a configuration of a medical robotic arm | |
| JP2023512006A (ja) | 関節置換ロボット手術情報の提供装置及び提供方法 | |
| KR102274175B1 (ko) | 수술 내비게이션 장치 및 그 방법 | |
| KR20210103028A (ko) | 수술 대상체의 정합 확인방법, 그 장치 및 이를 포함하는 시스템 | |
| US11232861B1 (en) | Systems and methods for displaying predetermined information for clinical use | |
| US20240197409A1 (en) | Tool navigation in mixed reality computer-assisted surgery | |
| US20250032133A1 (en) | Computer-assisted navigation of lock hole in implant | |
| Heinrich et al. | A novel Registration Method for Optical See-Through Augmented Realty Devices and Optical Tracking Data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190905 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20210204 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20210628 |
|
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210701 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210702 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20240731 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250701 Start annual number: 5 End annual number: 5 |