KR102228054B1 - 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 - Google Patents
노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 Download PDFInfo
- Publication number
- KR102228054B1 KR102228054B1 KR1020190039004A KR20190039004A KR102228054B1 KR 102228054 B1 KR102228054 B1 KR 102228054B1 KR 1020190039004 A KR1020190039004 A KR 1020190039004A KR 20190039004 A KR20190039004 A KR 20190039004A KR 102228054 B1 KR102228054 B1 KR 102228054B1
- Authority
- KR
- South Korea
- Prior art keywords
- control rod
- protection system
- rod assembly
- core protection
- ceap
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012360 testing method Methods 0.000 title claims abstract description 76
- 238000000034 method Methods 0.000 title claims description 17
- 230000002159 abnormal effect Effects 0.000 claims abstract description 4
- 238000004891 communication Methods 0.000 claims description 29
- 238000004422 calculation algorithm Methods 0.000 claims description 12
- 238000010998 test method Methods 0.000 claims description 12
- 238000004364 calculation method Methods 0.000 claims description 11
- 238000012545 processing Methods 0.000 claims description 5
- 238000004088 simulation Methods 0.000 abstract description 4
- 238000010248 power generation Methods 0.000 description 8
- 238000004458 analytical method Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000012795 verification Methods 0.000 description 3
- 235000014676 Phragmites communis Nutrition 0.000 description 2
- 238000009835 boiling Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000008054 signal transmission Effects 0.000 description 2
- 101100273664 Neurospora crassa (strain ATCC 24698 / 74-OR23-1A / CBS 708.71 / DSM 1257 / FGSC 987) ccp-1 gene Proteins 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 230000010485 coping Effects 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000013480 data collection Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000004992 fission Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000009257 reactivity Effects 0.000 description 1
- 238000004092 self-diagnosis Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/36—Prevention of errors by analysis, debugging or testing of software
- G06F11/3604—Analysis of software for verifying properties of programs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/36—Prevention of errors by analysis, debugging or testing of software
- G06F11/362—Debugging of software
- G06F11/3648—Debugging of software using additional hardware
- G06F11/3652—Debugging of software using additional hardware in-circuit-emulation [ICE] arrangements
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F11/00—Error detection; Error correction; Monitoring
- G06F11/36—Prevention of errors by analysis, debugging or testing of software
- G06F11/3668—Testing of software
- G06F11/3672—Test management
- G06F11/3684—Test management for test design, e.g. generating new test cases
-
- G—PHYSICS
- G21—NUCLEAR PHYSICS; NUCLEAR ENGINEERING
- G21C—NUCLEAR REACTORS
- G21C9/00—Emergency protection arrangements structurally associated with the reactor, e.g. safety valves provided with pressure equalisation devices
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Quality & Reliability (AREA)
- General Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- High Energy & Nuclear Physics (AREA)
- Software Systems (AREA)
- Monitoring And Testing Of Nuclear Reactors (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따른 노심보호계통의 제어봉집합체프로세서 동적 소프트웨어 검증시험(CEAP DSVT) 수행 시 형상을 나타낸 구성도이다.
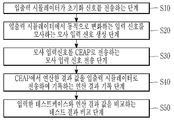
도 3은 본 발명의 다른 일 실시예에 따른 노심보호계통의 제어봉집합체프로세서 동적 소프트웨어 검증시험(CEAP DSVT) 방법을 나타낸 순서도이다.
도 4는 본 발명의 다른 일 실시예에 따른 노심보호계통의 제어봉집합체프로세서 동적 소프트웨어 검증시험(CEAP DSVT) 신호 인가 방법을 설명하기 위하여 도시한 그래프이다.
50: 제어기 54: 제어봉집합체프로세서 (CEAP)
Claims (10)
- 적어도 2 이상의 채널을 포함하는 노심보호계통에 있어서,
정상 상태 또는 이상 상태를 포함하는 모사 상태 신호를 생성하여 상기 노심보호계통의 채널에 송신하는 입출력 시뮬레이터(I/O Simulator); 및
제어봉집합체프로세서(CEAP)를 포함하며, 입력된 상기 모사 상태 신호에 대하여 상기 채널이 출력한 결과 신호를 수신하고, 상기 노심보호계통의 정상 동작 여부 판단을 위하여 상기 결과 신호를 분석하는 제어기
를 포함하고,
상기 입출력 시뮬레이터는 테스트케이스의 시나리오에 따라 입력 신호를 모사하여 통신으로 상기 제어봉집합체프로세서(CEAP)로 전송하고,
상기 입출력 시뮬레이터는 통신으로 상기 제어봉집합체프로세서(CEAP)의 연산 결과를 전달 받을 수 있는, 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치. - 삭제
- 노심보호계통 제어봉집합체프로세서(CEAP)를 검증시험 하는 방법으로서,
입출력 시뮬레이터에서 테스트케이스의 시나리오에 따라 동적으로 변화하는 입력 신호를 모사하는 모사 입력 신호 생성 단계;
상기 모사 입력 신호를 상기 제어봉집합체프로세서(CEAP)로 전송하는 모사 입력 신호 전송 단계; 및
상기 제어봉집합체프로세서(CEAP)에서 연산한 결과 값을 상기 입출력 시뮬레이터로 전송하여 실시간 기록하는 연산 결과 기록 단계
를 포함하고,
상기 연산 결과 기록 단계는, 상기 제어봉집합체프로세서(CEAP)에서 연산한 결과 값을 통신을 통해 기록하는 것을 특징으로 하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 제 3 항에 있어서,
상기 모사 입력 신호 전송 단계는,
상기 모사 입력 신호를 통신을 통해 전송하는 것을 특징으로 하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 삭제
- 제 3 항에 있어서,
상기 입출력 시뮬레이터가 통신을 통해 초기화 신호를 전송하는 단계를 더 포함하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 제 3 항에 있어서,
상기 모사 입력 신호 생성 단계는,
상기 테스트케이스에 정의된 각 변수의 주요 지점의 값들을 기준으로 사이 값들을 선형 보간(interpolation)하여 상기 입력 신호를 모사하는 것을 특징으로 하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 제 3 항에 있어서,
상기 모사 입력 신호 전송 단계와 상기 연산 결과 기록 단계는,
상기 제어봉집합체프로세서(CEAP)가 매 통신 주기마다 상기 모사 입력 신호를 수신하고, 동시에 상기 연산 결과를 상기 입출력 시뮬레이터로 전송하는 것을 포함하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 제 3 항에 있어서,
상기 연산 결과 기록 단계는,
상기 입출력 시뮬레이터가 상기 제어봉집합체프로세서(CEAP)로부터 전송된 전체 상기 연산 결과 값을 저장하거나 또는 주요 결과 값이 변경된 시점만을 저장하는 것을 특징으로 하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법. - 제 3 항에 있어서,
제어봉 위치 신호 처리 알고리즘이 정상 동작하는지 여부를 판단하기 위하여 상기 테스트케이스와 상기 연산 결과 값을 비교하는 테스트 결과 비교 단계를 더 포함하는 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190039004A KR102228054B1 (ko) | 2019-04-03 | 2019-04-03 | 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190039004A KR102228054B1 (ko) | 2019-04-03 | 2019-04-03 | 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200117212A KR20200117212A (ko) | 2020-10-14 |
| KR102228054B1 true KR102228054B1 (ko) | 2021-03-12 |
Family
ID=72847032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190039004A Active KR102228054B1 (ko) | 2019-04-03 | 2019-04-03 | 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102228054B1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115346696B (zh) * | 2022-08-17 | 2024-01-30 | 中国核动力研究设计院 | 一种用于核安全级堆芯冷却监测系统的验证系统和方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012115882A2 (en) | 2011-02-22 | 2012-08-30 | PCTEL Secure LLC | Systems and methods for enhanced security in wireless communication |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20010037389A (ko) * | 1999-10-16 | 2001-05-07 | 이호림 | 원자로의 부적절노심냉각감시기기에 대한 시험장치 및 방법 |
| KR20060061038A (ko) * | 2004-12-01 | 2006-06-07 | 두산중공업 주식회사 | 원자력 제어봉 구동장치 제어시스템의 검증 장치 및 방법 |
| KR101797078B1 (ko) * | 2016-07-15 | 2017-11-13 | 두산중공업 주식회사 | 원자로노심보호계통 유지보수 시뮬레이션 장치 및 시스템 |
| KR101865666B1 (ko) * | 2016-07-22 | 2018-07-13 | 두산중공업 주식회사 | 원자로노심보호계통 소프트웨어 검증용 시뮬레이션 장치 및 시스템 |
-
2019
- 2019-04-03 KR KR1020190039004A patent/KR102228054B1/ko active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012115882A2 (en) | 2011-02-22 | 2012-08-30 | PCTEL Secure LLC | Systems and methods for enhanced security in wireless communication |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20200117212A (ko) | 2020-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11728051B2 (en) | Nuclear reactor protection systems and methods | |
| KR101865666B1 (ko) | 원자로노심보호계통 소프트웨어 검증용 시뮬레이션 장치 및 시스템 | |
| US10580541B2 (en) | Apparatus and system for simulating maintenance of reactor core protection system | |
| Hashemian | Nuclear power plant instrumentation and control | |
| e Silva et al. | Cybersecurity assessment framework for digital interface between safety and security at nuclear power plants | |
| KR102228054B1 (ko) | 노심보호계통 제어봉집합체프로세서의 동적 소프트웨어 검증시험 장치 및 방법 | |
| Pakonen et al. | Verification of fault tolerant safety I&C systems using model checking | |
| KR20200117213A (ko) | 노심보호계통의 1채널 동적 시험장치 및 시험방법 | |
| Swaminathan | Design aspects of safety critical instrumentation of nuclear installations | |
| Kim et al. | Input-domain software testing for failure probability estimation of safety-critical applications in consideration of past input sequence | |
| Tyrväinen | Probabilistic modelling of common cause failures in digital I&C systems-Literature review | |
| Nam et al. | HINT-Sec: Hardware-in-the-loop nuclear power plant testbed for cyber security | |
| Kang et al. | A quantitative study on risk issues in safety feature control system design in digitalized nuclear power plant | |
| Guo | Model-Based Cyber-Security Framework for Nuclear Power Plant | |
| Shin et al. | A study of cyber-attack impact to condenser test-bed by using STPA-SafeSec | |
| El-Genk et al. | NICSim: Nuclear Instrumentation and Control Simulation for Modeling Cyber-Attacks | |
| Korsah et al. | A qualitative assessment of current CCF guidance based on a review of safety system digital implementation changes with evolving technology | |
| Park et al. | Development and EQ test of the KNICS RPS prototype | |
| Gohar et al. | Control and Protection System Conceptual Design Logic Diagrams for Neutron Source Facility at the Kharkov Institute of Physics and Technology | |
| Zahedi | HARDWARE CONTROLLER IMPLEMENTATION OF CANDU NUCLEAR POWER PLANT SHUTDOWN SYSTEM | |
| Lee et al. | Model-Based Diagnostics and Mitigation of Cyber Threats | |
| CN115641973A (zh) | 一种用于堆芯中子通量测量系统的验证系统和方法 | |
| Mbonjo et al. | Approach for the Evaluation of the Impact of Potential Software Failures in Software-Based Instrumentation and Control (I&C) Equipment in Nuclear Power Plants | |
| Liu et al. | The Safety Constraints and Evaluation of I&C Algorithm Configuration Based on SCADE Platform | |
| Deutsch et al. | EPRI-sponsored demonstration of signal validation at BWR and PWR nuclear stations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20190403 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200627 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20201214 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20210309 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20210309 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20231227 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241226 Start annual number: 5 End annual number: 5 |