KR101421535B1 - 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 - Google Patents
무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 Download PDFInfo
- Publication number
- KR101421535B1 KR101421535B1 KR1020130051396A KR20130051396A KR101421535B1 KR 101421535 B1 KR101421535 B1 KR 101421535B1 KR 1020130051396 A KR1020130051396 A KR 1020130051396A KR 20130051396 A KR20130051396 A KR 20130051396A KR 101421535 B1 KR101421535 B1 KR 101421535B1
- Authority
- KR
- South Korea
- Prior art keywords
- wiring
- speed
- control unit
- car
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0069—Control
- B62B5/0076—Remotely controlled
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47B—TABLES; DESKS; OFFICE FURNITURE; CABINETS; DRAWERS; GENERAL DETAILS OF FURNITURE
- A47B31/00—Service or tea tables, trolleys, or wagons
- A47B31/02—Service or tea tables, trolleys, or wagons with heating, cooling or ventilating means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0069—Control
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Thermal Sciences (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Alarm Systems (AREA)
Abstract
본 발명의 배선카는 온장실과 냉장실을 구비하고 음식을 제공하는 배선카에 있어서, 상기 온장실과 냉장실로 이루어진 수납 공간의 온도를 제어하는 온도 조절부를 구비하는 몸체부; 상기 몸체부의 하부에 고정되며 회전력을 공급하는 구동부와 결합되는 복수 개의 구동 바퀴; 및 상기 몸체부의 전면에 설치되며 상기 배선카의 전후진, 속도 및 설정 온도를 제어하며, 상기 배선카의 이상 주행 상황 또는 비상 정지 상황이 발생할 경우에 상기 배선카의 속도를 감속시키거나 정지시키는 컨트롤부를 포함하는 것을 특징으로 한다.
본 발명의 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카에 의하면, 복수 개의 배선카를 원격지에 위치한 중앙 컴퓨터로 무선 통신을 이용하여 효율적인 통합 관리를 할 수 있다는 효과를 가진다.
Description
도 2는 도 1에 따른 컨트롤부의 구성도;
도 3은 도 1에 따른 배선카의 이상 주행 및 정지 상황을 도시한 속도 프로파일을 도시한 도면;
도 4은 도 1에 따른 컨트롤부를 구비한 배선카의 실물 사진;
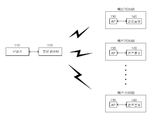
110 : 단말기
120 : 중앙 컴퓨터
Claims (9)
- 온장실과 냉장실을 구비하고 음식을 제공하는 배선카에 있어서,
상기 온장실과 냉장실로 이루어진 수납 공간의 온도를 제어하는 온도 조절부를 구비하는 몸체부;
상기 몸체부의 하부에 고정되며 회전력을 공급하는 구동부와 결합되는 복수 개의 구동 바퀴; 및
상기 몸체부의 전면에 설치되며 상기 배선카의 전후진, 속도 및 설정 온도를 제어하며, 상기 배선카의 이상 주행 상황 또는 비상 정지 상황이 발생할 경우에 상기 배선카의 속도를 감속시키거나 정지시키는 컨트롤부를 포함하고,
상기 컨트롤부는 미리 저장된 가속도 데이터 베이스를 구비하며 상기 가속도 데이터 베이스와 비교하여 정상 속도를 초과하여 비상 정지 상황의 가속도 미만의 제1 가속도이면 상기 컨트롤부의 감속 주행 스위치에 온 신호를 인가하여 배선카의 주행 속도를 정상 속도 미만으로 감속시키고, 상기 비상 정지 상황의 가속도 이상이면 컨트롤부의 비상 스위치에 온 신호를 인가하여 상기 배선카의 동작을 정지시키는 것을 특징으로 하는 배선카.
- 제 1항에 있어서,
상기 컨트롤부는 상기 수납 공간에 장착되어 내부의 설정 온도를 검출하는 온도 센서; 상기 몸체부의 전면에 구비되며 가해진 압력에 따라 전기적인 신호를 출력하는 속도 조절 센서; 상기 검출된 설정 온도와 출력된 전기적인 신호에 따라 제어 신호를 상기 온도 조절부와 구동부에 출력하는 제어수단; 상기 제어 수단에 의해 출력된 설정 온도와 속도를 표시하는 모니터; 및 상기 제어 수단과 연결되며 상기 설정 온도와 속도를 외부에 무선 통신으로 전송하는 무선 액세스 포인트를 포함하는 것을 특징으로 하는 배선카.
- 삭제
- 제 1항 내지 2항 중 어느 한 항에 있어서,
상기 컨트롤부는 RFID 리더기를 더 구비하며 급식 기구에 부착되며 급식자의 식사 내용이 저장된 RFID 배식 태그를 읽고 상기 모니터에 디스플레이함으로 환자 또는 손님에 기초하여 생성된 급식 리스트와 비교하여 급식자에 정확한 식사가 배달되도록 하는 것을 특징으로 하는 배선카.
- 제 4항에 있어서,
상기 컨트롤부는 상기 몸체부의 후면에 후방 카메라를 더 구비하여 후진 주행시 후진 시야를 상기 모니터에 출력함으로 안전 사고를 예방하는 것을 특징으로 하는 배선카.
- 온장실과 냉장실을 구비하고 음식을 제공하는 배선카 통합 제어 시스템에 있어서,
상기 배선카의 속도와 설정 온도 데이터를 저장하고 컨트롤부에 구비된 무선 액세스 포인트를 통하여 상기 데이터를 무선 통신으로 전송하는 복수 개의 배선카; 및
상기 배선카로부터 전송된 상기 데이터를 모니터링하고 분석하여 그에 따른 배선카의 상기 설정 온도를 제어하며 모니터링된 속도를 연산하여 이상 주행 상황 또는 비상 정지 상황이 발생할 경우에 무선 통신으로 제어 신호를 전송하여 상기 배선카의 속도를 감속시키거나 정지시키는 중앙 컴퓨터를 포함하는 것을 특징으로 하는 무선 통신을 이용한 배선카 통합 제어 시스템.
- 제 6항에 있어서,
상기 중앙 컴퓨터는 미리 저장된 가속도 데이터 베이스를 구비하며 상기 가속도 데이터 베이스와 비교하여 정상 속도를 초과하고 비상 정지 상황의 가속도 미만의 제1 가속도이면 제어 신호를 상기 컨트롤부의 감속 주행 스위치에 전송하여 배선카의 속도를 정상 속도 미만으로 감속시키거나 상기 비상 정지 상황의 제2 가속도 이상이면 제어 신호를 상기 컨트롤부의 비상 스위치에 전송하여 상기 배선카의 동작을 정지시키는 것을 특징으로 하는 무선 통신을 이용한 배선카 통합 제어 시스템.
- 제 6항 또는 제 7항에 있어서,
상기 배선카는 RFID 리더기를 더 구비하며 급식 기구에 부착되며 급식자의 식사 내용이 저장된 RFID 배식 태그를 읽고 상기 모니터에 디스플레이하여 상기 중앙 컴퓨터에 무선으로 전송함으로 환자 또는 손님에 기초하여 생성된 급식 리스트와 비교하여 급식자에 정확한 식사가 배달되도록 하는 것을 특징으로 하는 배선카 통합 제어 시스템.
- 제 8항에 있어서,
상기 중앙 컴퓨터는 원하는 룸에 부착된 위치 정보 태그에 기초하여 식사를 제공받는 환자 또는 손님의 식사 정보에 대한 급식 리스트를 생성하며, 상기 급식 리스트는 상기 배선카에 구비된 도어록 센서와 상기 RFID 배식 태그로부터 출력된 신호를 상기 중앙 컴퓨터가 무선으로 수신하여 배식이 완료됨을 인식하고 상기 급식 리스트를 갱신하는 것을 특징으로 하는배선카 통합 제어 시스템.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130051396A KR101421535B1 (ko) | 2013-05-07 | 2013-05-07 | 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 |
| US13/891,918 US9114818B2 (en) | 2013-05-07 | 2013-05-10 | Integrated control system for service distribution car using wireless communications and service distribution car |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130051396A KR101421535B1 (ko) | 2013-05-07 | 2013-05-07 | 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR101421535B1 true KR101421535B1 (ko) | 2014-08-13 |
Family
ID=51748793
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130051396A Active KR101421535B1 (ko) | 2013-05-07 | 2013-05-07 | 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9114818B2 (ko) |
| KR (1) | KR101421535B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109074074A (zh) * | 2016-04-26 | 2018-12-21 | 洋马株式会社 | 作业车辆控制系统 |
| WO2019054560A1 (ko) * | 2017-09-12 | 2019-03-21 | 명세씨엠케이 주식회사 | 상시 냉온장이 가능한 전동식 배선카 |
| KR102219642B1 (ko) * | 2020-11-10 | 2021-02-24 | 명세씨엠케이 주식회사 | 자율주행 배선카용 무선 통합 모니터링 시스템 |
| KR102251524B1 (ko) | 2020-11-10 | 2021-05-13 | 명세씨엠케이 주식회사 | 트레이 홀더 구조체 착탈 기반 위생관리 강화형 배선카 |
| KR102251511B1 (ko) * | 2020-11-10 | 2021-05-13 | 명세씨엠케이 주식회사 | 자율주행 온냉 배선카 제어시스템 |
| CN112826227A (zh) * | 2021-02-25 | 2021-05-25 | 伊利诺斯工具制品有限公司 | 餐车 |
| KR102280331B1 (ko) * | 2020-11-10 | 2021-07-22 | 명세씨엠케이 주식회사 | 자율주행 배선카 시스템 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9535421B1 (en) * | 2014-02-28 | 2017-01-03 | Savioke, Inc. | Mobile delivery robot with interior cargo space |
| EP3435826A4 (en) * | 2016-04-01 | 2019-09-04 | Ember Technologies, Inc. | SECURE DELIVERY TANK |
| USD884766S1 (en) * | 2018-06-04 | 2020-05-19 | Yape S.R.L. | Trolley for handling goods |
| US10556334B1 (en) | 2018-07-13 | 2020-02-11 | Vecna Robotics, Inc. | System and method of asynchronous robotic retrieval and delivery of items between two sites |
| US10549915B1 (en) * | 2018-07-13 | 2020-02-04 | Vecna Robotics, Inc. | System and method of asynchronous robotic retrieval and delivery of items |
| CN108806115A (zh) * | 2018-08-21 | 2018-11-13 | 北京极智嘉科技有限公司 | 无人的自助式操作系统、方法和操作门 |
| IT202200005858A1 (it) * | 2022-03-24 | 2023-09-24 | Cimas S R L | Carrello portavivande smart e kit smart associato |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11127975A (ja) * | 1997-10-27 | 1999-05-18 | Matsushita Electric Works Ltd | 配膳車 |
| KR20020000750A (ko) * | 2001-11-28 | 2002-01-05 | 김종섭 | 전동식 온ㆍ냉 배선카의 어시스트 제어 시스템 |
| KR20120129043A (ko) * | 2011-05-18 | 2012-11-28 | 박의경 | 알에프아이디를 이용한 이동형 급식 기구 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7025121B2 (en) * | 2003-08-06 | 2006-04-11 | Aladdin Temp-Rite, Llc | Refrigeration/rethermalization food delivery system |
| CA2864027C (en) * | 2005-10-14 | 2017-05-02 | Aldo Zini | Robotic ordering and delivery apparatuses, systems and methods |
-
2013
- 2013-05-07 KR KR1020130051396A patent/KR101421535B1/ko active Active
- 2013-05-10 US US13/891,918 patent/US9114818B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11127975A (ja) * | 1997-10-27 | 1999-05-18 | Matsushita Electric Works Ltd | 配膳車 |
| KR20020000750A (ko) * | 2001-11-28 | 2002-01-05 | 김종섭 | 전동식 온ㆍ냉 배선카의 어시스트 제어 시스템 |
| KR20120129043A (ko) * | 2011-05-18 | 2012-11-28 | 박의경 | 알에프아이디를 이용한 이동형 급식 기구 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109074074A (zh) * | 2016-04-26 | 2018-12-21 | 洋马株式会社 | 作业车辆控制系统 |
| WO2019054560A1 (ko) * | 2017-09-12 | 2019-03-21 | 명세씨엠케이 주식회사 | 상시 냉온장이 가능한 전동식 배선카 |
| KR102219642B1 (ko) * | 2020-11-10 | 2021-02-24 | 명세씨엠케이 주식회사 | 자율주행 배선카용 무선 통합 모니터링 시스템 |
| KR102251524B1 (ko) | 2020-11-10 | 2021-05-13 | 명세씨엠케이 주식회사 | 트레이 홀더 구조체 착탈 기반 위생관리 강화형 배선카 |
| KR102251511B1 (ko) * | 2020-11-10 | 2021-05-13 | 명세씨엠케이 주식회사 | 자율주행 온냉 배선카 제어시스템 |
| KR102280331B1 (ko) * | 2020-11-10 | 2021-07-22 | 명세씨엠케이 주식회사 | 자율주행 배선카 시스템 |
| CN112826227A (zh) * | 2021-02-25 | 2021-05-25 | 伊利诺斯工具制品有限公司 | 餐车 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140333190A1 (en) | 2014-11-13 |
| US9114818B2 (en) | 2015-08-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101421535B1 (ko) | 무선 통신을 이용한 배선카 통합 제어 시스템 및 배선카 | |
| US20180304722A1 (en) | Automotive climate system and method of controlling same | |
| CN105857078B (zh) | 信息显示系统 | |
| US9707853B2 (en) | Wireless electrical charging system and method of operating same | |
| US10870364B2 (en) | Method for autonomous charging of a motor vehicle | |
| US9809085B1 (en) | Climate control, safety, and communications system | |
| US20160303992A1 (en) | Electrified Vehicle Predictive Low-Voltage Battery Alert | |
| US10946761B2 (en) | Battery management device, vehicle having the same, and method for controlling the vehicle | |
| US20140021914A1 (en) | Vehicle charging system | |
| US20200108724A1 (en) | Adaptive plug-in reminder via smart phone application | |
| KR20190073847A (ko) | 자율주행차량의 스티어링 휠 파지 감지 시스템 및 방법 | |
| US11565604B2 (en) | Electric vehicle | |
| US12187097B2 (en) | Automatic interior protection | |
| ES2965245T3 (es) | Procedimiento y terminal móvil para controlar al menos un dispositivo de aire acondicionado | |
| JP2014077598A (ja) | 温度調節器、空気調和機、給湯器及び床暖房 | |
| EP3466742B1 (en) | System for managing, identifying and interconnecting a plurality of propulsion batteries of an electric vehicle | |
| US20240123865A1 (en) | Power Control Apparatus And Vehicle Having The Same | |
| KR20180049935A (ko) | 전기자동차 공조제어기 및 제어 방법 | |
| CN104821092B (zh) | 风光互补式车辆通行限高的实现方法 | |
| KR20240030161A (ko) | 전력 제어 장치 및 그를 가지는 차량 | |
| US20200070666A1 (en) | Vehicle Alignment System | |
| JP2013123307A (ja) | 非接触電力伝送装置 | |
| KR20170070464A (ko) | 엔진룸 쿨링팬 제어기 및 그 제어 방법 | |
| KR102251511B1 (ko) | 자율주행 온냉 배선카 제어시스템 | |
| KR102651343B1 (ko) | 전기 자동차의 스마트 터치 패널을 이용한 고전압시스템 상태표시방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| P14-X000 | Amendment of ip right document requested |
St.27 status event code: A-5-5-P10-P14-nap-X000 |
|
| P16-X000 | Ip right document amended |
St.27 status event code: A-5-5-P10-P16-nap-X000 |
|
| Q16-X000 | A copy of ip right certificate issued |
St.27 status event code: A-4-4-Q10-Q16-nap-X000 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| FPAY | Annual fee payment |
Payment date: 20180716 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| J206 | Request for trial to confirm the scope of a patent right | ||
| PJ0206 | Trial to confirm the scope of a patent |
St.27 status event code: A-5-5-V10-V11-apl-PJ0206 |
|
| J301 | Trial decision |
Free format text: TRIAL NUMBER: 2018100003571; TRIAL DECISION FOR CONFIRMATION OF THE SCOPE OF RIGHT_AFFIRMATIVE REQUESTED 20181102 Effective date: 20190528 |
|
| PJ1301 | Trial decision |
St.27 status event code: A-5-5-V10-V15-crt-PJ1301 Decision date: 20190528 Appeal event data comment text: Appeal Kind Category : Confirmation of the scope of right_affirmative, Appeal Ground Text : 1421535 Appeal request date: 20181102 Appellate body name: Patent Examination Board Decision authority category: Office appeal board Decision identifier: 2018100003571 |
|
| J204 | Request for invalidation trial [patent] | ||
| PJ0204 | Invalidation trial for patent |
St.27 status event code: A-5-5-V10-V11-apl-PJ0204 |
|
| PJ2001 | Appeal |
St.27 status event code: A-5-5-V10-V12-crt-PJ2001 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20190715 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| J301 | Trial decision |
Free format text: TRIAL NUMBER: 2019100001639; TRIAL DECISION FOR INVALIDATION REQUESTED 20190529 Effective date: 20200113 |
|
| PJ1301 | Trial decision |
St.27 status event code: A-5-5-V10-V15-crt-PJ1301 Decision date: 20200113 Appeal event data comment text: Appeal Kind Category : Invalidation, Appeal Ground Text : 1421535 Appeal request date: 20190529 Appellate body name: Patent Examination Board Decision authority category: Office appeal board Decision identifier: 2019100001639 |
|
| PJ2001 | Appeal |
St.27 status event code: A-5-5-V10-V12-crt-PJ2001 |
|
| PJ1201 | Withdrawal of trial |
St.27 status event code: A-5-5-V10-V13-apl-PJ1201 |
|
| J122 | Written withdrawal of action (patent court) | ||
| PJ1202 | Withdrawal of action (patent court) |
St.27 status event code: A-5-5-V10-V13-crt-PJ1202 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 10 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 11 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 12 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 12 |