JP6965646B2 - Transport vehicle and transport equipment - Google Patents
Transport vehicle and transport equipment Download PDFInfo
- Publication number
- JP6965646B2 JP6965646B2 JP2017171257A JP2017171257A JP6965646B2 JP 6965646 B2 JP6965646 B2 JP 6965646B2 JP 2017171257 A JP2017171257 A JP 2017171257A JP 2017171257 A JP2017171257 A JP 2017171257A JP 6965646 B2 JP6965646 B2 JP 6965646B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- state
- support
- shelf
- transfer device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000032258 transport Effects 0.000 claims description 134
- 230000007246 mechanism Effects 0.000 claims description 41
- 230000008707 rearrangement Effects 0.000 claims description 15
- 238000000034 method Methods 0.000 description 27
- 230000008569 process Effects 0.000 description 27
- 230000003028 elevating effect Effects 0.000 description 15
- 238000003384 imaging method Methods 0.000 description 15
- 239000000463 material Substances 0.000 description 4
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 238000004886 process control Methods 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
- B25J9/0018—Bases fixed on ceiling, i.e. upside down manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
- B65G1/1373—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses
- B65G1/1375—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed for fulfilling orders in warehouses the orders being assembled on a commissioning stacker-crane or truck
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Warehouses Or Storage Devices (AREA)
Description
本発明は、容器を支持する棚部を上下方向に複数段備えた容器棚の前面に沿って走行して、前記容器を搬送する搬送車、及び、その搬送車を複数備えた搬送設備に関する。 The present invention relates to a transport vehicle that travels along the front surface of a container shelf provided with a plurality of shelves that support the container in the vertical direction and transports the container, and a transport vehicle provided with a plurality of the transport vehicles.
かかる搬送設備の従来例が、特開2004−277062号公報(特許文献1)に記載されている。特許文献1の搬送設備に備えられている搬送車は、容器棚に対して容器を出し入れする移載ロボット6を備えている。この搬送車は、容器棚の前方に停止した状態で移載ロボット6により容器棚から容器を取り出し、移載ロボット6が容器を支持した状態で別の容器棚の前方まで走行した後、移載ロボット6は支持している容器を別の容器棚に収容するようにして、容器を搬送する。
A conventional example of such a transport facility is described in Japanese Patent Application Laid-Open No. 2004-277062 (Patent Document 1). The transport vehicle provided in the transport equipment of
上記した搬送設備では、容器棚の容器に収容されている物品を取り出す場合や、容器棚の容器に物品を収容する場合は、搬送車によって容器棚から容器を取り出してピッキング作業を行う所まで搬送し、容器に対する物品の収容や容器から物品を取り出すピッキング作業を行う。そして、ピッキング作業が完了した容器は、搬送車に載せられて容器棚に搬送されて収納される。このように、容器に対して物品の収容や取り出しを行う場合は、容器を搬送車によって一旦ピッキング作業を行う所まで搬送する必要があるため、容器に対する物品の収納や取り出しを効率よく行えなかった。 In the above-mentioned transport equipment, when taking out the articles stored in the container of the container shelf, or when storing the articles in the container of the container shelf, the container is taken out from the container shelf by the transport vehicle and transported to the place where the picking work is performed. Then, the goods are stored in the container and the picking work is performed to take out the goods from the container. Then, the container for which the picking work has been completed is placed on a transport vehicle, transported to a container shelf, and stored. In this way, when storing and taking out articles in a container, it is necessary to transport the container to a place where picking work is performed once by a transport vehicle, so that it is not possible to efficiently store and take out articles in the container. ..
そこで、容器に対する物品の収容や取り出しを効率よく行える搬送車、及び、その搬送車を複数備えた搬送設備の実現が望まれる。 Therefore, it is desired to realize a transport vehicle capable of efficiently storing and removing articles in a container, and a transport facility equipped with a plurality of the transport vehicles.
上記に鑑みた、搬送車の特徴構成は、容器を支持する棚部を上下方向に複数段備えた容器棚に沿って走行して、前記容器を搬送し、
前記容器を支持する支持領域と、前記容器棚に対して前記容器を出し入れする容器移載装置と、前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、前記容器移載装置は、更に、前記支持領域に対しても前記容器を出し入れするように構成されている点にある。
In view of the above, the characteristic configuration of the transport vehicle is that the container is transported by traveling along a container shelf provided with a plurality of shelves supporting the container in the vertical direction.
A support area for supporting the container, a container transfer device for moving the container in and out of the container shelf, a container in the first state which is the container supported by the support area, and a container transfer. A recognition device that recognizes an article contained in the container in at least one state of the container in the second state, which is the container in a state supported by the mounting device, and an article recognized by the recognition device are the first. An article transfer device for transferring between a container in one state and a container in the second state is provided , and the container transfer device further moves the container in and out of the support area. It is in the point that it is composed.
この構成によれば、容器移載装置により容器棚から取り出された容器は容器移載装置に支持される。そして、このように容器移載装置に支持された第二状態の容器と、支持領域に支持されている第一状態の容器との間で、物品を移載することができる。そして、物品の取り出しや収容が完了した第二状態の容器は、容器移載装置により容器棚に収納することができる。
このように、容器移載装置により容器棚から取り出された容器に対して、搬送車において物品の取り出しや収容を行うことができる。そのため、容器棚から取り出した容器を、搬送車によって搬送する必要がなくなり、容器に対する物品の収容や取り出しを効率よく行える。
According to this configuration, the container taken out from the container shelf by the container transfer device is supported by the container transfer device. Then, the article can be transferred between the container in the second state supported by the container transfer device and the container in the first state supported by the support region. Then, the container in the second state in which the articles have been taken out and stored can be stored in the container shelf by the container transfer device.
In this way, the container taken out from the container shelf by the container transfer device can be taken out and stored in the transport vehicle. Therefore, it is not necessary to transport the container taken out from the container shelf by a transport vehicle, and the container can be efficiently stored and taken out of the article.
上記に鑑みた、更に別の搬送車の特徴構成は、容器を支持する棚部を上下方向に複数段備えた容器棚に沿って走行して、前記容器を搬送し、前記容器を支持する支持領域と、前記容器棚に対して前記容器を出し入れする容器移載装置と、前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、前記容器は、前記上下方向に段積み可能に構成され、前記支持領域は、複数の前記容器を段積み状態で支持可能であり、前記支持領域に段積みされた容器群の前記容器の並び順を換える並び換え装置を更に備え、前記容器群の最上段に位置する前記容器が、前記第一状態の容器である点にある。 In view of the above, another characteristic configuration of the transport vehicle is that the container is transported along the container shelf provided with a plurality of stages of shelves for supporting the container in the vertical direction to transport the container, and the support for supporting the container is supported. The area, the container transfer device for moving the container in and out of the container shelf, the container in the first state which is the container supported by the support area, and the container transfer device. A recognition device that recognizes an article contained in the container in at least one state of the container in the second state, which is the container in the state, and an article recognized by the recognition device are the container in the first state and the container in the first state. The container is configured to be stackable in the vertical direction, and the support area includes a plurality of the containers in a stack state. A rearranging device that is supportable and rearranges the order of the containers of the container group stacked in the support area is further provided, and the container located at the uppermost stage of the container group is the container in the first state. There is a certain point.
この構成によれば、容器移載装置により容器棚から取り出された容器は容器移載装置に支持される。そして、このように容器移載装置に支持された第二状態の容器と、支持領域に支持されている第一状態の容器との間で、物品を移載することができる。そして、物品の取り出しや収容が完了した第二状態の容器は、容器移載装置により容器棚に収納することができる。 According to this configuration, the container taken out from the container shelf by the container transfer device is supported by the container transfer device. Then, the article can be transferred between the container in the second state supported by the container transfer device and the container in the first state supported by the support region. Then, the container in the second state in which the articles have been taken out and stored can be stored in the container shelf by the container transfer device.
このように、容器移載装置により容器棚から取り出された容器に対して、搬送車において物品の取り出しや収容を行うことができる。そのため、容器棚から取り出した容器を、搬送車によって搬送する必要がなくなり、容器に対する物品の収容や取り出しを効率よく行える。 In this way, the container taken out from the container shelf by the container transfer device can be taken out and stored in the transport vehicle. Therefore, it is not necessary to transport the container taken out from the container shelf by a transport vehicle, and the container can be efficiently stored and taken out of the article.
更に、この構成によれば、並び換え装置により支持領域に支持された容器群の容器の並び順を換えることで、容器群を構成する複数の容器のうちの任意の容器を容器群の最上段に移動させること、つまり、第一状態の容器とすることができる。そのため、支持領域に段積み状態で複数の容器を段積みしながら、物品移載装置は、容器群の全ての容器に対して物品の取り出しや収容を行うことができる。 Further, according to this configuration, by changing the order of the containers of the container group supported in the support area by the rearranging device, any container among the plurality of containers constituting the container group can be placed on the uppermost stage of the container group. It can be moved to, that is, a container in the first state. Therefore, the article transfer device can take out and accommodate the articles for all the containers in the container group while stacking a plurality of containers in the support area in a stacked state.
1.実施形態
搬送車を複数備えた搬送設備の実施形態について図面に基づいて説明する。
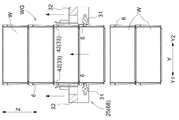
図1に示すように、搬送設備には、容器Wを収容する複数の容器棚1と、容器Wを搬送する複数の搬送車2と、容器Wを段積みした容器群WGを搬入及び搬出する搬入出部3と、複数の搬送車2を制御する制御装置Hと、を備えている。
1. 1. Embodiment An embodiment of a transport facility including a plurality of transport vehicles will be described with reference to the drawings.
As shown in FIG. 1, the transport equipment carries in and out a plurality of
図2及び図4に示すように、容器Wは、底部の周辺に側壁部を立設させて形成されており、上面が開口した箱形状に形成されている。本例では、容器Wとして、樹脂材にて構成された変形しないコンテナを用いている。容器Wの側壁部には、容器Wの長手方向に沿って形成されている突起部6(リブ)や容器Wの上下方向Zに沿って形成されている突起部6(リブ)が備えられている。そして、本例では、容器Wは、突起部6に容器移載装置24の保持部46が係合することで、容器移載装置24によって水平方向に移動させることや持ち上げることが可能となっている。尚、図3における容器移載装置24により移載されている容器Wは、上下方向Zに沿って形成されている突起部6を示すために横断して一部を切り欠いた容器Wを図示している。
図2及び図4に示すように、容器Wの上端部と別の容器Wの下端部とが上下方向Zに嵌合可能に構成されており、容器Wは、上下方向Zに段積み可能に構成されている。ちなみに、段積みした容器Wは、容器Wの底部と当該容器Wの上方に段積みした別の容器Wの底部との間に収容空間が形成されるようになっており、容器Wに物品を収容した状態で容器Wを段積み可能に構成されている。
As shown in FIGS. 2 and 4, the container W is formed by erecting a side wall portion around the bottom portion, and is formed in a box shape having an open upper surface. In this example, as the container W, a non-deformable container made of a resin material is used. The side wall portion of the container W is provided with a protrusion 6 (rib) formed along the longitudinal direction of the container W and a protrusion 6 (rib) formed along the vertical direction Z of the container W. There is. Then, in this example, the container W can be moved or lifted in the horizontal direction by the
As shown in FIGS. 2 and 4, the upper end portion of the container W and the lower end portion of another container W can be fitted in the vertical direction Z, and the container W can be stacked in the vertical direction Z. It is configured. By the way, in the stacked containers W, a storage space is formed between the bottom of the container W and the bottom of another container W stacked above the container W, and articles are placed in the container W. The container W can be stacked in a stored state.
〔容器棚〕
容器棚1は、容器Wを支持する棚部11を上下方向Zに複数段備えている。棚部11には、段積みしていない容器Wが容器棚1の棚幅方向Aに並ぶ状態で複数支持される。
図1に示すように、複数の容器棚1は、棚幅方向Aに沿う姿勢で設置されている。前面が互いに対向する2つの容器棚1は、棚奥行方向Bに間隔を空けた状態で設置されている。これら2つの容器棚1の間には、棚間通路12が形成されており、棚間通路12は、搬送車2が走行する通路として用いられる。棚幅方向Aに沿う姿勢の複数の容器棚1が棚奥行方向Bに並べられており、複数の容器棚1は、棚間通路12が複数形成されるように配置されている。搬送車2が棚間通路12を走行するときは、搬送車2は容器棚1の前面に沿って走行する。ちなみに、後面が互いに対向する2つの容器棚1の間には棚間通路12は形成されていない。
尚、容器棚1の長手方向に沿う方向を棚幅方向A、上下方向Z視で棚幅方向Aに対して直交する方向を棚奥行方向Bと称している。また、容器棚1の棚間通路12を向く面を前面、容器棚1の棚間通路12を向く面とは反対側の面を後面と称している。
[Container shelf]
The
As shown in FIG. 1, the plurality of
The direction along the longitudinal direction of the
図2に示すように、棚部11は、第一規制体13と第二規制体14とを備えている。第一規制体13は、棚部11に支持された容器Wに対して棚奥行方向Bの両側に位置するように備えられており、第二規制体14は、棚部11に支持された容器Wに対して棚幅方向Aの両側に位置するように備えられている。棚部11に支持された容器Wは、第一規制体13により棚奥行方向Bに移動することが規制され、第二規制体14により棚幅方向Aに移動することが規制されている。
棚部11の前方には、棚幅方向Aに沿ってガイドレール15が設置されている。棚部11の前方を走行する搬送車2は、ガイドレール15により棚奥行方向Bへの移動が規制された状態で棚間通路12を棚幅方向Aに沿って走行する。
As shown in FIG. 2, the
A guide rail 15 is installed in front of the
搬入出部3は、搬入部16と搬出部18とを備えている。搬入部16には、物品を収容していない複数の容器Wが上下方向Zに段積みされた容器群WGが搬入される。この搬入部16に搬入された容器群WGを構成する容器Wは、搬送車2に載せられ、搬送車2によるピッキング作業によって物品が収容される。搬送車2に載せられている容器群WGを構成する複数の容器Wには物品が収容され、搬送車2は、物品を収容した容器群WGを搬出部18に搬送する。尚、搬入部16から搬送車2に載せられる複数の容器W(容器群WG)は、物品が収容されていない空の容器Wである。搬送車2から搬出部18に搬送される複数の容器W(容器群WG)は、物品を収容した実の容器Wである。
The carry-in / out
〔搬送車〕
図2及び図3に示すように、搬送車2は、床面上を走行する走行部21と、容器Wを段積み状態で支持する支持領域22に設置されて支持領域22の容器Wを支持するコンベヤ23と、容器Wを移載する容器移載装置24と、支持領域22に段積みされた容器群WGの内の任意の高さの容器Wをそれより下の容器Wに対して持ち上げる持ち上げ機構25と、物品を移載する物品移載装置26と、を備えている。搬送車2が容器棚1の前面に沿って走行する場合において、容器移載装置24は、支持領域22に対して前後方向第一側X1に隣接する状態で設置されている。容器移載装置24は、棚部11に支持されている容器Wの支持領域22への移載と、支持領域22に支持されている容器Wの棚部11への移載と、を行う。以下、搬送車2について説明するが、搬送車2が棚間通路12に位置する状態、すなわち搬送車2が容器棚1の前面に沿って走行している状態において、棚幅方向Aに沿う方向を前後方向Xとし、前後方向Xの一方側を前後方向第一側X1、その反対側を前後方向第二側X2とし、棚奥行方向Bに沿う方向であり且つ上下方向Z視で前後方向Xに対して直交する方向を左右方向Yとし、左右方向Yの一方側を左右方向第一側Y1、その反対側を左右方向第二側Y2として説明する。
[Transport vehicle]
As shown in FIGS. 2 and 3, the
支持領域22の容器群WGは、コンベヤ23の搬送面に支持されている。すなわち、この搬送車2では、コンベヤ23上に、容器Wを段済み状態で支持する支持領域22が形成されている。
コンベヤ23は、左右方向Yに沿って容器群WGを搬送するように設置されている。そのため、搬送車2の左右方向Yに搬入部16が隣接するように搬送車2を停止させた状態で、コンベヤ23を作動させることで、搬入部16の容器群WGをコンベヤ23上に搬送することができる。また、搬送車2の左右方向Yに搬出部18が隣接するように搬送車2を停止させた状態で、コンベヤ23を作動させることで、コンベヤ23上の容器群WGを搬出部18へ搬送することができる。
The container group WG of the
The
また、図9に示すように、搬送車2は、支持領域22に支持された状態の容器Wである第一状態の容器W、及び、容器移載装置24に支持された状態の容器Wである第二状態の容器Wの、双方の状態の容器Wに収容されている物品を認識する認識装置27を備えている。
認識装置27は、第一状態の容器Wを上方から撮像して第一状態の容器Wに収容されている物品を認識する第一撮像装置27Aと、第二状態の容器Wを上方から撮像して第二状態の容器Wに収容されている物品を認識する第二撮像装置27Bと、を備えている。
第一撮像装置27Aは、支持領域22に支持された容器群WGより上方に設置されており、容器群WGの最上段に位置する容器Wを上方から撮像可能に設置されている。
第二撮像装置27Bは、容器移載装置24の昇降移動範囲より上方に設置されており、容器移載装置24(図10参照)を設定高さに位置させた状態で当該容器移載装置24に支持された容器Wを撮像可能に設置されている。
第一撮像装置27A及び第二撮像装置27Bは、第一マスト37の上端部と第二マスト52の上端部とに亘って架設された上部フレーム28に支持されている。
Further, as shown in FIG. 9, the
The
The
The
The
〔持ち上げ機構〕
図4に示すように、持ち上げ機構25は、支持領域22に支持された容器群WGの内の任意の高さの容器Wをそれより下の容器Wに対して持ち上げる。持ち上げ機構25は、容器Wを支持する支持部31と、支持部31を支持して上下方向Zに沿って移動する昇降部32と、支持領域22の容器Wを適正位置に案内する案内部33と、を備えている。
昇降部32は、上下方向Z視で矩形状に枠組みされた枠体により構成されており、上下方向Z視で支持領域22の容器Wの周囲を囲うように位置している。昇降部32は、第一モータ36の駆動により、走行部21に立設された第一マスト37に沿って上下方向Zに移動する。
[Lift mechanism]
As shown in FIG. 4, the
The elevating
案内部33は、昇降部32に支持されており、昇降部32を上下方向Zに沿って移動させた場合に、支持領域22の容器Wに接触して当該容器Wを支持領域22の適正位置に案内する。説明を加えると、案内部33は、第一案内部41と第二案内部42とを備えている。第一案内部41は、案内部33における昇降部32から上方に突出する部分に備えられている。第二案内部42は、案内部33における昇降部32から下方に突出する部分に備えられている。第一案内部41は、上下方向Z視で適正位置の容器Wに対して前後方向第二側X2及び左右方向Yの両側に位置するように備えられている。第二案内部42は、上下方向Z視で適正位置の容器Wに対して前後方向Xの両側及び左右方向Yの両側に位置するように備えられている。
The
第一案内部41は、上方側ほど適正位置の容器Wから離れる傾斜面を備えている。昇降部32が上方側に移動するときに、支持領域22の容器群WGに適正位置から水平方向にずれた容器Wが存在する場合は、その容器Wに第一案内部41の傾斜面が接触して容器Wを適正位置側に案内することで、適正位置からずれている容器Wを適正位置に移動させることができる。
また、第二案内部42は、下方側ほど適正位置の容器Wから離れる傾斜面を備えている。昇降部32が下方側に移動するときに、支持領域22の容器群WGに適正位置から水平方向にずれた容器Wが存在する場合は、この容器Wに第二案内部42の傾斜面が接触して容器Wを適正位置側に案内することで、適正位置からずれている容器Wを適正位置に移動させることができる。
なお、容器Wの適正位置は、支持領域22に対して予め設定された容器Wの位置であり、段積みされた複数の容器Wの適正位置は、上下方向Z視で同じ位置となっている。
The
Further, the
The proper position of the container W is a preset position of the container W with respect to the
持ち上げ機構25は、第三案内部43を備えている。この第三案内部43は、昇降部32より上方に位置するように昇降部32に支持されている。第三案内部43は、前後方向第一側X1ほど左右方向Yにおいて適正位置の容器Wから離れる傾斜面を備えている。図10に示すように、容器移載装置24により支持領域22の容器群WGに容器Wを載せる場合において、当該容器Wが適正位置から左右方向Yにずれている場合に、この容器Wに第三案内部43の傾斜面が接触して左右方向Yにおいて容器Wを適正位置に移動させる。
The
図4から図6に示すように、支持部31は、上下方向Z視で支持領域22の容器Wの突起部6と重なる支持位置(図4及び図5参照)と、上下方向Z視で支持領域22の容器Wと重ならない退避位置(図6参照)と、に移動自在に構成されている。説明を加えると、支持部31は中央が膨出する板状に形成されており、第二モータ44の駆動により前後方向Xに沿う軸心周りに回転することで、前後方向X及び左右方向Yに沿う回転位置となる支持位置と、前後方向X及び上下方向Zに沿う回転位置となる退避位置とに移動する。
As shown in FIGS. 4 to 6, the
図6に示すように、持ち上げ機構25は、支持部31を退避位置とすることで、昇降部32を上下方向Zに移動させるときに支持部31が支持領域22の容器群WGに接触することを回避できる。
そして、図5に示すように、持ち上げ機構25は、支持領域22の容器群WGのうちの任意の容器Wに対応する高さに昇降部32を移動させた状態で、支持部31を退避位置から支持位置に移動させ、その後、昇降部32を上昇させる。これにより、任意の容器Wの突起部6に支持部31が係合し、任意の容器Wを持ち上げることができる。このとき、任意の容器Wより上に他の容器Wが段積みされている場合は、任意の容器Wと共にこれより上に段積みされている容器Wを持ち上げることができる。このように、持ち上げ機構25は、支持領域22に段積みされている容器群WGの内の任意の容器W及び任意の容器Wより上の容器Wを纏めて持ち上げることができる。
持ち上げ機構25は、容器Wを持ち上げた状態から昇降部32を下降させることで、支持部31にて支持していた1つ又は複数の容器Wを、コンベヤ23上、又は、コンベヤ23の支持領域22に容器Wが存在する場合はその容器W上に段積みすることができる。
As shown in FIG. 6, in the
Then, as shown in FIG. 5, the
The
〔容器移載装置〕
図7及び図8に示すように、容器移載装置24は、容器Wの外面を保持して容器Wを移動させるように構成されている。容器移載装置24は、容器Wを保持する保持部46と、保持部46を支持すると共に水平方向に沿って出退自在な出退部47と、容器Wの底面を下方から支持する支持体48と、出退部47及び支持体48を支持すると共に上下方向Zに沿う縦軸心周りに回転自在な回転部49と、回転部49を支持する基部50と、を備えている。保持部46及び出退部47は、出退部47の出退方向に対して上下方向Z視で直交する方向に並ぶ状態で一対備えられている。保持部46、出退部47及び回転部49により、容器Wを移載する移載部60が構成されており、移載部60は、棚部11と支持体48との間で容器Wを移載すると共に、支持体48と支持領域22との間で容器Wを移載する。
[Container transfer device]
As shown in FIGS. 7 and 8, the
容器移載装置24は、支持体48に支持された容器Wの高さが、コンベヤ23に支持された容器群WGの最下段の容器Wより低くなる高さから、コンベヤ23に規定数(本実施形態では10)の容器Wを段積みした容器群WGの最上段の容器Wより高くなる高さまで、昇降可能に構成されている。また、容器移載装置24は、容器棚1に備えられた棚部11の夫々に対応する高さ(移載用高さ)に昇降可能である。最下段の棚部11に対応する移載用高さは、コンベヤ23に支持された容器群WGの最下段の容器Wよりも低い高さで、容器Wを支持体48によって支持する高さに設定されている。
Since the height of the container W supported by the
基部50は、第三モータ51の駆動により、走行部21に立設された第二マスト52に沿って上下方向Zに移動する。基部50は、回転部49及び出退部47が介在する状態で保持部46を支持しており、第三モータ51により基部50が上下方向Zに沿って移動することで、保持部46が上下方向Zに沿って移動する。尚、第三モータ51が、保持部46を上下方向Zに沿って移動させる上下駆動部に相当する。
The
回転部49は、内装されたモータの駆動により、上下方向Zに沿う縦軸心P周りに回転する。回転部49は、出退部47を支持しており、回転部49が縦軸心P周りに回転することで、出退部47が縦軸心周りに回転して、出退部47によって保持部46が突出する方向を縦軸心P周りに変更する。具体的には、回転部49が縦軸心P周りに回転することで、出退部47によって保持部46が突出する方向を、左右方向第一側Y1と、左右方向第二側Y2と、前後方向第二側X2と、に変更することができる。尚、回転部49が、出退部47を縦軸心P周りに回転させて出退部47によって保持部46が突出する方向を変更する回転駆動部に相当する。以下、保持部46が突出する方向を左右方向第一側Y1とした容器移載装置24の状態を、第一棚移載状態と称し、保持部46が突出する方向を左右方向第二側Y2とした容器移載装置24の状態を、第二棚移載状態と称し、保持部46が突出する方向を前後方向第二側X2とした容器移載装置24の状態を、段積み移載状態と称する。
The rotating
一対の出退部47の夫々は、回転部49に支持された固定部54と、固定部54に対して水平方向に出退移動する移動部55と、移動部55を固定部54に対して水平方向に出退移動させる第四モータ56と、を備えている。移動部55には、上下方向Zに沿う軸心周りに回転自在な一対のプーリ57に巻回されたベルト58と、一対のプーリ57のうちの一方を回転駆動させる第五モータ59と、を備えている。ベルト58には保持部46が固定されている。
出退部47は、第四モータ56による移動部55の出退移動と第五モータ59によるベルト58の回動とによって、保持部46を水平方向に沿って移動させ、保持部46を引退位置(図7参照)とこの引退位置から水平方向に突出させた突出位置(図8参照)とに移動させる。尚、この出退部47が、保持部46を水平方向に沿って移動させる水平駆動部に相当する。
Each of the pair of exit /
The exit /
また、ベルト58の左右方向Yの両端部では、プーリ57の外周面に沿って移動することで、一方の出退部47に支持されている保持部46と、他方の出退部47に支持されている保持部46との間隔を変更できる。これら一対の保持部46の間隔は、一対の保持部46が容器Wに係合する係合間隔と、一対の保持部46が容器Wから離脱する離脱間隔と、に変更できる。尚、一対の保持部46により容器Wを保持するとは、保持部46が出退移動した場合に容器Wの突起部6に係合して容器Wを移動させることができることを表わしており、一対の保持部46によって容器Wを挟持していなくてもよい。
Further, at both ends of the
容器移載装置24により、支持領域22に支持されている容器Wを支持体48に移載する場合について説明する。
容器移載装置24は、まず、回転部49を縦軸心P周りに回転させて、容器移載装置24を段積み移載状態とすると共に、基部50を昇降させて、支持領域22における移載対象の容器Wに対応する移載用高さに容器移載装置24を昇降させる。そして、図11に示すように、容器移載装置24を引退状態から突出状態に切り換えた後、一対の保持部46の間隔を離脱間隔から係合間隔に変更して、一対の保持部46によって容器Wを保持する。この後、保持部46を引退位置に移動させて、支持領域22の容器Wを支持体48に移載する。尚、移載対象の容器Wが他の容器Wの上に段積みされている場合は、一対の保持部46によって容器Wを保持した後、基部50を上昇させて移載対象の容器Wの少なくとも前端部と下方に隣接する容器Wとの嵌合を外した後、保持部46を引退位置に移動させる。
A case where the container W supported by the
First, the
次に、容器移載装置24により、支持体48に支持されている容器Wを支持領域22に移載する場合について説明する。
容器移載装置24は、まず、回転部49を縦軸心P周りに回転させて、容器移載装置24を段積み移載状態とすると共に、基部50を昇降させて、支持領域22の移載する高さに容器移載装置24を昇降させる。そして、図12に示すように、係合間隔の一対の保持部46によって容器Wを保持した状態で、容器移載装置24を引退状態から突出状態に切り換えて、支持体48に支持されている容器Wを支持領域22の容器Wに段積みする。その後、一対の保持部46の間隔を係合間隔から離脱間隔に変更して移載対象の容器Wに対する保持を解除した後、保持部46を引退位置に移動させる。尚、支持領域22に容器Wが存在しない場合は移載対象の容器Wはコンベヤ23上に移載する。
Next, a case where the container W supported by the
First, the
容器移載装置24により、棚部11に支持されている容器Wを支持体48に移載する場合や、容器移載装置24により、支持体48に支持されている容器Wを棚部11に移載する場合については、容器移載装置24の状態を段積み移載状態に代えて第一棚移載状態又は第二棚移載状態にすることや、移載対象の容器Wが段積みされていない場合でも第一規制体13を乗り越えるために基部50を上昇させること以外は、支持体48に支持されている容器Wを支持領域22に移載する場合と同様に容器移載装置24を動作させるため、説明は省略する。
When the container W supported by the
〔物品移載装置〕
物品移載装置26は、容器Wの開口部から容器Wに収容されている物品を保持して取り出すように構成されており、認識装置27により認識された物品を第一状態の容器Wと第二状態の容器Wとの間で移載する。物品移載装置26は、第一撮像装置27Aに撮像された物品を第一状態の容器Wから第二状態の容器Wに移載する。また、物品移載装置26は、第二撮像装置27Bに撮像された物品を第二状態の容器Wから第一状態の容器Wに移載する。物品移載装置26は、上部フレーム28に支持された支持フレーム29に支持されている。
[Article transfer device]
The
図9に示すように、物品移載装置26は、台座部61と旋回部62と第一アーム63と第二アーム64と第三アーム65と物品保持部66とを備えている。台座部61は、上部フレーム28に固定されている。旋回部62は、台座部61に対して上下方向Zに沿う軸心周りに回転自在に支持されている。第一アーム63の基端部が、旋回部62に揺動自在に連結されている。第一アーム63は、旋回部62に対して水平方向に沿う軸心周りに揺動自在となっている。第二アーム64の基端部が、第一アーム63の先端部に揺動自在に連結されている。第二アーム64は、第一アーム63に対して水平方向に沿う軸心周りに揺動自在となっている。第二アーム64は、第二アーム64の長手方向の中間部において第二アーム64の長手方向に沿う軸心周りに回転可能に構成されている。第三アーム65の基端部が、第二アーム64の先端部に揺動自在に連結されている。また、第三アーム65の先端部に、第三アーム65の長手方向に沿って回転自在に物品保持部66が連結されている。このように、物品移載装置26は、垂直多関節ロボット(6軸ロボット)により構成されている。
物品保持部66は、物品を吸着により保持する吸着パッドを備えており、物品を吸着保持する。
As shown in FIG. 9, the
The
〔並び換え装置〕
図11及び図12に示すように、搬送車2は、支持領域22に支持された容器群WGの容器Wの並び順を換える並び換え装置68を備えている。並び換え装置68は、持ち上げ機構25と容器移載装置24とを備えている。
並び換え装置68は、次のようにして容器群WGの容器Wの並び順を換える。
つまり、まず、持ち上げ機構25によって容器群WGの任意の容器Wをそれより下の容器Wに対して持ち上げる。次に、容器群WGの内の持ち上げ機構25によって持ち上げられなかった容器Wの内の最上段に位置する容器Wを、容器移載装置24によって支持領域22から支持体48上に移載する。
その後、持ち上げ機構25によって、持ち上げていた容器Wを持ち上げなかった容器Wに段積みし、その段積みした容器群WG(容器移載装置24によって移載した容器Wは除く)に対して、容器移載装置24が、支持体48上の容器Wを段積みする。
このように、持ち上げ機構25によって持ち上げる任意の容器Wの一段下の容器Wを、容器群WGの最上段に移動させるようにして、容器群WGの容器Wの並び順を換える。本実施形態では、任意の容器Wを容器群WGにおける下から2段目の容器Wとしている。
[Sort device]
As shown in FIGS. 11 and 12, the
The
That is, first, the
After that, the lifted container W is stacked on the unlifted container W by the
In this way, the container W one step below any container W to be lifted by the
また、持ち上げ機構25は、第一状態の容器Wが第一撮像装置27Aに対して下方に大きく離れているために第一撮像装置27Aにより第一状態の容器Wに収容されている物品を認識できない場合は、第一状態の容器Wを第一設定高さまで持ち上げてもよい。具体的には、支持領域22に支持されている容器群WGの数が少ない場合(例えば、容器群WGを構成する容器Wの数が5つの場合)では、第一状態の容器Wの高さが低く、第一状態の容器Wが第一撮像装置27Aに対して下方に大きく離れるため、第一撮像装置27Aにより第一状態の容器Wに収容されている物品を認識し難い。このような場合は、持ち上げ機構25によって、第一状態の容器Wを第一設定高さまで持ち上げた状態で、第一撮像装置27Aにより第一状態の容器Wに収容されている物品を認識する。尚、本実施形態では、第一設定高さは、10の容器Wで構成した容器群WGをコンベヤ23上に載せた状態における最上段に位置する容器Wの高さとしている。
Further, the
また、持ち上げ機構25は、第一状態の容器Wが物品移載装置26に対して下方に大きく離れているために物品移載装置26により第一状態の容器Wに適切に物品を移載できない場合は、第一状態の容器Wを第二設定高さまで持ち上げてもよい。具体的には、支持領域22に支持されている容器群WGの数が少ない場合(例えば、容器群WGを構成する容器Wの数が5つの場合)では、第一状態の容器Wの高さが低く、第一状態の容器Wが物品移載装置26に対して下方に大きく離れるため、物品移載装置26により第一状態の容器Wに物品を適切に移載し難い。このような場合は、持ち上げ機構25によって、第一状態の容器Wを第二設定高さまで持ち上げた状態で、物品移載装置26により第一状態の容器Wに物品を移載する。尚、本実施形態では、第二設定高さは、10の容器Wで構成した容器群WGをコンベヤ23上に載せた状態における最上段に位置する容器Wの高さとしており、第一設定高さと同じ高さとしている。
Further, the
〔制御装置〕
図1に示すように、制御装置Hは、複数の搬送車2の走行経路Rを設定すると共に、複数の搬送車2が走行経路Rに沿って走行するように搬送車2を制御する。走行経路Rは、棚幅方向Aに沿う経路や棚奥行方向Bに沿う経路を有しており、制御装置Hは、走行経路Rを一方向に走行するように搬送車2を制御する。そのため、2つの容器棚1の間に形成される棚間通路12においては、搬送車2の走行方向は一方向となる。そして、例えば、複数の搬入出部3の一つである対象搬入出部3Aで容器群WGを搬送車2に載せ、複数の容器棚1の一部である複数の対象容器棚1Aに収納されている容器Wから物品を取り出した後、対象搬入出部3Aに容器群WGを降ろす場合は、制御装置Hは、図1において太い実線で示した走行経路Rに沿って搬送車2が走行して複数の対象容器棚1Aに収納されている容器Wから物品を取り出すための搬送指令を搬送車2に送信して、搬送車2を制御する。
尚、図1においては、搬送車2の走行経路Rを一点鎖線及び太い実線で示している。また、図1においては、搬送車2の走行方向を矢印で示している。
〔Control device〕
As shown in FIG. 1, the control device H sets the traveling routes R of the plurality of
In FIG. 1, the traveling path R of the
搬送車2に備えられた制御部69は、制御装置Hからの搬送情報に基づいて、次のようにして搬送車2を制御する。
制御部69は、容器群WGを搬送車2に載せる搬入制御と、第二状態の容器Wと第一状態の容器Wとの間で物品を移載する移載制御と、容器群WGを搬送車2から降ろす搬出制御と、支持領域22と棚部11との間で容器Wを入れ換える入換制御と、を実行する。本実施形態では、移載制御では、物品の第一状態の容器Wから第二状態の容器Wへの移載と、物品の第二状態の容器Wから第一状態の容器Wへの移載と、のうち、物品の第二状態の容器Wから第一状態の容器Wへの移載のみを行う。制御部69は、搬入制御を実行して搬入部16の容器群WGを搬送車2のコンベヤ23に載せた後、移載制御を複数回実行して容器群WGを構成する複数の容器Wの夫々に物品を収容し、その後、搬出制御を実行してコンベヤ23上の容器群WGを搬出部18に降ろす。
The
The
搬入制御では、搬入部16に搬送車2が隣接して停止するように走行部21を制御した後、容器群WGを搬入部16から支持領域22に移載するようにコンベヤ23を制御する。
搬出制御では、搬出部18に搬送車2が隣接して停止するように走行部21を制御した後、容器群WGを支持領域22から搬出部18に移載するようにコンベヤ23を制御する。
In the carry-in control, the traveling
In the unloading control, the traveling
次に、移載制御について説明する。
移載制御では、対象容器棚1Aに収容されている容器Wを容器移載装置24により支持体48上に取り出す取出処理と、物品移載装置26によって第二状態の容器Wから第一状態の容器Wに物品を移載する移載処理と、支持体48上の容器Wを対象容器棚1Aに収納する収納処理と、容器群WGの容器Wの並び順を換える並び換え処理と、を実行する。移載制御では、取出処理、移載処理、収納処理の順に実行すると共に、必要に応じて並び換え処理を実行する。尚、通常は収納処理の後に並び換え処理を実行するが、移載制御により物品を収容した容器Wが最後の容器Wの場合(移載制御によって容器群WGを構成する容器Wの全てに物品が収容された場合)等では、移載制御において並び換え処理を行わない場合がある。
Next, the transfer control will be described.
In the transfer control, the container W housed in the
取出処理では、対象容器棚1Aにおける取出対象の容器Wを支持する棚部11に対応する移載用高さに容器移載装置24を昇降させた後、取出対象の容器Wを棚部11から支持体48に移載するように、容器移載装置24を制御する。このように取出処理を実行することで、対象容器棚1Aに収容されていた取出対象の容器Wは、支持体48に支持され、第二状態の容器Wになる。
収納処理は、支持体48が支持している容器Wが収納されていた棚部11に対応する移載用高さに容器移載装置24を昇降させた後、支持体48から棚部11に移載するように、容器移載装置24を制御する。
In the take-out process, after raising and lowering the
In the storage process, the
移載処理では、第二撮像装置27Bの撮像情報に基づいて第二状態の容器Wに収容されている物品の位置や種類等を認識し、容器棚1から取り出す対象である取り出し対象の物品を第二状態の容器Wから第一状態の容器Wに移載するように、物品移載装置26を制御する。その後、移載処理では、第一撮像装置27Aにより、第一状態の容器Wに収容されている物品の位置や種類等を認識し、物品移載装置26によって物品の移載が適切に行われているか確認する。
In the transfer process, the position and type of the article housed in the container W in the second state are recognized based on the imaging information of the
また、移載処理では、第一撮像装置27Aの撮像情報に基づいて第一状態の容器Wに収容されている物品の位置や種類等を認識し、容器棚1へ収納する対象である取り出し対象の物品を第一状態の容器Wから第二状態の容器Wに移載するように、物品移載装置26を制御する。その後、移載処理では、第二撮像装置27Bにより、第二状態の容器Wに収容されている物品の位置や種類等を認識し、物品移載装置26によって物品の移載が適切に行われているか確認する。尚、支持領域22に支持されている容器群WGにおける最上段の容器Wが第一状態の容器Wとなっている。
Further, in the transfer process, the position and type of the article housed in the container W in the first state are recognized based on the image pickup information of the first
並び換え処理では、まず、持ち上げ機構25により、容器群WGの内の任意の高さの容器Wを持ち上げ、容器移載装置24により、容器群WGにおける任意の高さの容器Wの一段下の容器Wを支持領域22から支持体48上に移載するように、持ち上げ機構25及び容器移載装置24を制御する。並び換え処理では、次に、持ち上げ機構25により持ち上げていた任意の高さの容器Wを降し、容器移載装置24により容器W(任意の高さの容器Wの一段下に位置していた容器W)を容器群WGにおける最上段の容器Wの上に載せるように、持ち上げ機構25及び容器移載装置24を制御する。このように、並び換え処理を実行することで、任意の高さの容器Wの一段下に位置していた容器Wは、容器群WGに載せられて最上段の容器Wとなると共に第一状態の容器Wとなる。
本実施形態では、容器群WGの内の任意の高さの容器Wを、容器群WGにおける下から2段目の容器Wとしている。よって、並び換え処理では、まず、持ち上げ機構25により、容器群WGにおける下から2段目の容器Wを持ち上げ、容器移載装置24により、容器群WGにおける最下段の容器Wを支持領域22から支持体48上に移載するように、持ち上げ機構25及び容器移載装置24を制御する。並び換え処理では、次に、持ち上げ機構25により持ち上げていた容器群WG(最下段の容器Wを以外)をコンベヤ23上に降し、容器移載装置24により最下段に位置していた容器Wを容器群WGにおける最上段の容器Wの上に載せるように、持ち上げ機構25及び容器移載装置24を制御する。このように、並び換え処理を実行することで、最下段に位置していた容器Wは、容器群WGに載せられて最上段の容器Wとなると共に第一状態の容器Wとなる。
In the sorting process, first, the
In the present embodiment, the container W at an arbitrary height in the container group WG is the container W in the second stage from the bottom in the container group WG. Therefore, in the rearrangement process, first, the
制御部69は、移載制御において、第一撮像装置27Aの撮像情報に基づいて第一状態の容器Wに収容されている物品の位置や種類を認識できない場合や、物品移載装置26によって第一状態の容器Wに収容されている物品を保持できない場合は、移載制御をキャンセルして入換制御を実行する。入換制御は、第一状態の容器Wを支持体48から支持領域22に移載すると共に支持領域22の容器群WGにおける空の容器Wを支持領域22から棚部11に移載する制御である。入換制御では、第一容器移載処理、第二容器移載処理の順に実行する。
第一容器移載処理は、第一状態の容器Wを支持体48から支持領域22に移載するように容器移載装置24を制御する。この第一移載処理では、第一状態の容器Wを、容器群WGの最上段に載せるように移載してもよく、持ち上げ機構25により容器Wを持ち上げて当該持ち上げた容器Wの一段下の容器Wに載せるように移載してもよい。
第二容器移載処理は、容器群WGから選択された空の容器Wを支持領域22から棚部11に移載するように容器移載装置24を制御する。この第二移載処理では、容器群WGにおける最上段の容器Wが空の場合は当該最上段の容器Wを棚部11に移載してもよく、最上段の容器Wより下方の容器Wが空の場合は当該下方の容器Wを棚部11に移載してもよい。
In the transfer control, the
The first container transfer process controls the
The second container transfer process controls the
2.その他の実施形態
次に、搬送車及び搬送設備のその他の実施形態について説明する。
2. Other Embodiments Next, other embodiments of the transport vehicle and the transport equipment will be described.
(1)上記実施形態では、認識装置27は、第一状態の容器W及び第二状態の容器Wの双方の容器Wに収容されている物品を認識する構成とされていたが、認識装置27が、第一状態の容器W及び第二状態の容器Wのうちの一方に収容されている物品のみを認識する構成とされていてもよい。
具体的には、例えば、物品移載装置26が、認識装置27により認識された物品を第一状態の容器Wから第二状態の容器Wにのみ移載する場合において、第一撮像装置27Aと第二撮像装置27Bとのうちの第一撮像装置27Aのみを備えて、認識装置27が、第一状態の容器Wに収容されている物品のみを認識する構成としてもよい。また、物品移載装置26が、認識装置27により認識された物品を第二状態の容器Wから第一状態の容器Wにのみ移載する場合において、第一撮像装置27Aと第二撮像装置27Bとのうちの第二撮像装置27Bのみを備えて、認識装置27が、第二状態の容器Wに収容されている物品のみを認識する構成としてもよい。
(1) In the above embodiment, the
Specifically, for example, when the
(2)上記実施形態では、容器移載装置24を、支持領域22の容器Wにおける左右方向Yを向く面に保持部46を係合させて容器Wを移載するように構成したが、容器移載装置24の構成は適宜変更してもよく、例えば、容器移載装置24を、支持領域22の容器Wの前後方向第一側X1を向く面に備えられた被係合部に保持部46を係合させて容器Wを移載するように構成してもよく、また、容器移載装置24を、支持領域22の容器Wを一対の保持部46によって左右方向Yに挟持して容器Wを移載するように構成してもよい。
(2) In the above embodiment, the
(3)上記実施形態では、支持領域22に、複数の容器Wを段積み状態で支持し、搬送車2に、支持領域22に段積みされた容器群WGの容器Wの並び順を換える並び換え装置68を備えたが、支持領域22に、容器Wを1つのみ支持し、搬送車2に、並び換え装置68を備えないようにしてもよい。
(3) In the above embodiment, a plurality of containers W are supported in the
(4)上記実施形態では、持ち上げ機構25と容器移載装置24とを用いて容器群WGの容器Wの並び順を換えるようにして、容器移載装置24が並び換え装置68の一部を構成したが、容器移載装置24とは別に第二移載装置を備えて、持ち上げ機構25と第二移載装置とを用いて容器群WGの容器Wの並び順を換えるようにして、容器移載装置24が並び換え装置68の一部を構成しないようにしてもよい。
(4) In the above embodiment, the
(5)上記実施形態では、容器移載装置24は、容器棚1から取り出した容器Wについて、物品の取り出しが完了した後に容器棚1における当該容器Wが収納されていた位置に収納したが、容器移載装置24は、容器棚1から取り出した容器Wについて、支持領域22に移載して容器群WGの最上段に段積みする、又は、持ち上げ機構25によって持ち上げた任意の容器Wの下に入れて容器群WGの中断に段積みするように、支持領域22に移載するようにしてもよい。また、容器群WGの最上段の容器W又は持ち上げ機構25によって持ち上げた任意の容器Wの一段下の容器Wを、容器棚1に収納するようにしてもよい。
(5) In the above embodiment, the
(6)上記実施形態では、支持領域22の容器群WGを、コンベヤ23の搬送面に支持したが、支持領域22に搬送機能を備えない支持台を備え、支持領域22の容器群WGを、支持台の上面に支持するようにしてもよい。
(6) In the above embodiment, the container group WG of the
(7)上記実施形態では、容器Wとして、樹脂材にて構成された変形しないコンテナを用いたが、折り畳み可能なコンテナを容器Wとして用いてもよく、また、布材や可塑性のある材質にて構成した変形可能な袋状のものを容器Wとして用いてもよい。 (7) In the above embodiment, a non-deformable container made of a resin material is used as the container W, but a foldable container may be used as the container W, and the container W may be made of a cloth material or a plastic material. The deformable bag-shaped container W may be used as the container W.
(8)上記実施形態では、制御装置Hが一部を除いて仮想的に走行経路Rを設定してその走行経路Rに沿って搬送車2を走行するように搬送車2を制御したが、走行経路Rの全体に亘ってガイドレール15を設置し、そのガイドレール15に沿って搬送車2が走行するようにしてもよい。また、上記実施形態では、床面上にガイドレール15を設置して、そのガイドレール15によって搬送車2が案内したが、床面上に磁気テープ等のガイドレール以外の案内体を設置して、ガイドレール15以外の案内体によって搬送車2を案内してもよい。
(8) In the above embodiment, the control device H virtually sets the travel path R except for a part and controls the
(9)上記実施形態では、物品保持部は、吸着パッドを備えて物品を吸着保持したが、物品保持部を、物品を把持する把持部を備えて物品を把持するようにしてもよく、物品保持体が物品を保持する形態は適宜変更してもよい。 (9) In the above embodiment, the article holding portion is provided with a suction pad to suck and hold the article, but the article holding portion may be provided with a grip portion for gripping the article to grip the article. The form in which the holder holds the article may be changed as appropriate.
(10)なお、上述した各実施形態で開示された構成は、矛盾が生じない限り、他の実施形態で開示された構成と組み合わせて適用することも可能である。その他の構成に関しても、本明細書において開示された実施形態は全ての点で単なる例示に過ぎない。従って、本開示の趣旨を逸脱しない範囲内で、適宜、種々の改変を行うことが可能である。 (10) The configurations disclosed in each of the above-described embodiments can be applied in combination with the configurations disclosed in other embodiments as long as there is no contradiction. With respect to other configurations, the embodiments disclosed herein are merely exemplary in all respects. Therefore, various modifications can be made as appropriate without departing from the gist of the present disclosure.
3.上記実施形態の概要
以下、上記において説明した搬送車及び搬送設備の概要について説明する。
3. 3. Outline of the above-described embodiment The outline of the transport vehicle and the transport equipment described above will be described below.
一つの態様として、搬送車は、容器を支持する棚部を上下方向に複数段備えた容器棚に沿って走行して、前記容器を搬送し、
前記容器を支持する支持領域と、前記容器棚に対して前記容器を出し入れする容器移載装置と、前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、前記容器移載装置は、更に、前記支持領域に対しても前記容器を出し入れするように構成されている。
In one embodiment, the transport vehicle travels along a container shelf provided with a plurality of shelves supporting the container in the vertical direction to transport the container.
A support area for supporting the container, a container transfer device for moving the container in and out of the container shelf, a container in the first state which is the container supported by the support area, and a container transfer. A recognition device that recognizes an article contained in the container in at least one state of the container in the second state, which is the container in a state supported by the mounting device, and an article recognized by the recognition device are the first. An article transfer device for transferring between a container in one state and a container in the second state is provided , and the container transfer device further moves the container in and out of the support area. It is configured.
この構成によれば、容器移載装置により容器棚から取り出された容器は容器移載装置に支持される。そして、このように容器移載装置に支持された第二状態の容器と、支持領域に支持されている第一状態の容器との間で、物品を移載することができる。そして、物品の取り出しや収容が完了した第二状態の容器は、容器移載装置により容器棚に収納することができる。
このように、容器移載装置により容器棚から取り出された容器に対して、搬送車において物品の取り出しや収容を行うことができる。そのため、容器棚から取り出した容器を、搬送車によって搬送する必要がなくなり、容器に対する物品の収容や取り出しを効率よく行える。
According to this configuration, the container taken out from the container shelf by the container transfer device is supported by the container transfer device. Then, the article can be transferred between the container in the second state supported by the container transfer device and the container in the first state supported by the support region. Then, the container in the second state in which the articles have been taken out and stored can be stored in the container shelf by the container transfer device.
In this way, the container taken out from the container shelf by the container transfer device can be taken out and stored in the transport vehicle. Therefore, it is not necessary to transport the container taken out from the container shelf by a transport vehicle, and the container can be efficiently stored and taken out of the article.
ここで、前記認識装置は、前記第一状態の容器に収容されている物品を認識し、前記物品移載装置は、前記認識装置により認識された物品を前記第一状態の容器から前記第二状態の容器に移載すると好適である。 Here, the recognition device recognizes the article contained in the container in the first state, and the article transfer device transfers the article recognized by the recognition device from the container in the first state to the second. It is suitable to transfer to the container in the state.
この構成によれば、認識装置によって第一状態の容器に収容されている物品を認識することで、その認識した物品を物品移載装置によって第一状態の容器から適切に取り出して保持することができるので、物品移載装置によって第一状態の容器から第二状態の容器に物品を適切に移載することができる。 According to this configuration, by recognizing the article contained in the container in the first state by the recognition device, the recognized article can be appropriately taken out from the container in the first state and held by the article transfer device. Therefore, the article can be appropriately transferred from the container in the first state to the container in the second state by the article transfer device.
また、前記認識装置は、前記第二状態の容器に収容されている物品を認識し、前記物品移載装置は、前記認識装置により認識された物品を前記第二状態の容器から前記第一状態の容器に移載すると好適である。 Further, the recognition device recognizes the article contained in the container in the second state, and the article transfer device transfers the article recognized by the recognition device from the container in the second state to the first state. It is suitable to transfer to the container of.
この構成によれば、認識装置によって第二状態の容器に収容されている物品を認識することで、その認識した物品を物品移載装置によって第ニ状態の容器から適切に取り出して保持することができるので、物品移載装置によって第二状態の容器から第一状態の容器に物品を適切に移載することができる。 According to this configuration, by recognizing the article contained in the container in the second state by the recognition device, the recognized article can be appropriately taken out from the container in the second state and held by the article transfer device. Therefore, the article can be appropriately transferred from the container in the second state to the container in the first state by the article transfer device.
また、前記容器移載装置は、前記容器の外面を保持して前記容器を移動させるように構成され、前記物品移載装置は、前記容器の開口部から前記容器に収容された物品を保持して取り出すように構成されていると好適である。 Further, the container transfer device is configured to hold the outer surface of the container and move the container, and the article transfer device holds the article contained in the container through the opening of the container. It is preferable that the container is configured to be taken out.
この構成によれば、容器移載装置は、外面を保持した状態で容器を支持することができる。そして、物品移載装置により容器から物品を取り出す場合、及び、物品移載装置により容器に物品を収容する場合において、容器移載装置によって容器の外面を保持した状態で支持できる。従って、物品移載装置によって容器から物品を取り出す場合等に容器を適切に保持することができるため、物品移載装置による物品の移載を適切に行い易い。 According to this configuration, the container transfer device can support the container while holding the outer surface. Then, when the article is taken out from the container by the article transfer device and when the article is stored in the container by the article transfer device, the outer surface of the container can be supported while being held by the container transfer device. Therefore, since the container can be appropriately held when the article is taken out from the container by the article transfer device, it is easy to appropriately transfer the article by the article transfer device.
また、前記容器は、前記上下方向に段積み可能に構成され、前記支持領域は、複数の前記容器を段積み状態で支持可能であり、前記支持領域に段積みされた容器群の前記容器の並び順を換える並び換え装置を更に備え、前記容器群の最上段に位置する前記容器が、前記第一状態の容器であると好適である。 Further, the containers are configured to be stackable in the vertical direction, and the support area can support a plurality of the containers in a stacked state, and the containers of the container group stacked in the support area can be supported. It is preferable that the container further provided with a sorting device for changing the sorting order, and the container located at the uppermost stage of the container group is the container in the first state.
この構成によれば、並び換え装置により支持領域に支持された容器群の容器の並び順を換えることで、容器群を構成する複数の容器のうちの任意の容器を容器群の最上段に移動させること、つまり、第一状態の容器とすることができる。そのため、支持領域に段積み状態で複数の容器を段積みしながら、物品移載装置は、容器群の全ての容器に対して物品の取り出しや収容を行うことができる。 According to this configuration, by changing the order of the containers of the container group supported in the support area by the rearrangement device, any container among the plurality of containers constituting the container group can be moved to the uppermost stage of the container group. That is, it can be a container in the first state. Therefore, the article transfer device can take out and accommodate the articles for all the containers in the container group while stacking a plurality of containers in the support area in a stacked state.
他の態様として、搬送車は、容器を支持する棚部を上下方向に複数段備えた容器棚に沿って走行して、前記容器を搬送し、前記容器を支持する支持領域と、前記容器棚に対して前記容器を出し入れする容器移載装置と、前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、前記容器は、前記上下方向に段積み可能に構成され、前記支持領域は、複数の前記容器を段積み状態で支持可能であり、前記支持領域に段積みされた容器群の前記容器の並び順を換える並び換え装置を更に備え、前記容器群の最上段に位置する前記容器が、前記第一状態の容器である。 In another aspect, the transport vehicle travels along a container shelf provided with a plurality of vertical stages of shelves for supporting the container, transports the container, supports the container, and supports the container, and the container shelf. A container transfer device for taking in and out the container, a container in the first state which is the container supported by the support region, and the container supported by the container transfer device. A recognition device that recognizes an article contained in the container in at least one state of the container in the second state, and an article recognized by the recognition device in the container in the first state and the container in the second state. The container is configured to be stackable in the vertical direction, and the support area is capable of supporting a plurality of the containers in a stack state. A rearranging device for rearranging the order of the containers of the container group stacked in the support region is further provided, and the container located at the uppermost stage of the container group is the container in the first state.
この構成によれば、容器移載装置により容器棚から取り出された容器は容器移載装置に支持される。そして、このように容器移載装置に支持された第二状態の容器と、支持領域に支持されている第一状態の容器との間で、物品を移載することができる。そして、物品の取り出しや収容が完了した第二状態の容器は、容器移載装置により容器棚に収納することができる。 According to this configuration, the container taken out from the container shelf by the container transfer device is supported by the container transfer device. Then, the article can be transferred between the container in the second state supported by the container transfer device and the container in the first state supported by the support region. Then, the container in the second state in which the articles have been taken out and stored can be stored in the container shelf by the container transfer device.
このように、容器移載装置により容器棚から取り出された容器に対して、搬送車において物品の取り出しや収容を行うことができる。そのため、容器棚から取り出した容器を、搬送車によって搬送する必要がなくなり、容器に対する物品の収容や取り出しを効率よく行える。 In this way, the container taken out from the container shelf by the container transfer device can be taken out and stored in the transport vehicle. Therefore, it is not necessary to transport the container taken out from the container shelf by a transport vehicle, and the container can be efficiently stored and taken out of the article.
更に、この構成によれば、並び換え装置により支持領域に支持された容器群の容器の並び順を換えることで、容器群を構成する複数の容器のうちの任意の容器を容器群の最上段に移動させること、つまり、第一状態の容器とすることができる。そのため、支持領域に段積み状態で複数の容器を段積みしながら、物品移載装置は、容器群の全ての容器に対して物品の取り出しや収容を行うことができる。 Further, according to this configuration, by changing the order of the containers of the container group supported in the support area by the rearranging device, any container among the plurality of containers constituting the container group can be placed on the uppermost stage of the container group. It can be moved to, that is, a container in the first state. Therefore, the article transfer device can take out and accommodate the articles for all the containers in the container group while stacking a plurality of containers in the support area in a stacked state.
また、前記容器移載装置は、前記容器を支持する支持体と前記容器を移載する移載部とを備え、前記移載部は、前記棚部と前記支持体との間での前記容器の移載と、前記支持体と前記支持領域との間での前記容器の移載とを行うと好適である。 Further, the container transfer device includes a support for supporting the container and a transfer portion for transferring the container, and the transfer portion is the container between the shelf portion and the support. It is preferable to transfer the container between the support and the support area.
この構成によれば、容器移載装置は、棚部から取り出した容器を支持領域に移載することや、支持領域から移載した容器を棚部に収納することができる。そのため、搬送車による搬送の自由度を高めることができる。 According to this configuration, the container transfer device can transfer the container taken out from the shelf to the support area and can store the container transferred from the support area in the shelf. Therefore, the degree of freedom of transportation by the transport vehicle can be increased.
また、前記支持領域に段積みされた前記容器群の内の任意の高さの前記容器をそれより下の前記容器に対して持ち上げる持ち上げ機構を更に備え、前記並べ換え装置は、前記持ち上げ機構と前記容器移載装置とを備えていると好適である。 Further, a lifting mechanism for lifting the container at an arbitrary height in the container group stacked in the support region with respect to the container below the container group is further provided, and the rearranging device includes the lifting mechanism and the above. It is preferable to have a container transfer device.
この構成によれば、容器移載装置は、容器群の最上段の容器を支持領域から移載することや、容器群の最上段の容器の上に他の容器を載せることに加えて、持ち上げ機構によって持ち上げた容器の一つ下の容器を支持領域から移載することや、持ち上げた容器の一つ下の容器の上に他の容器を載せることができる。これらの容器移載装置による容器の移載と持ち上げ機構による容器の持ち上げとを組み合わせて行うことで、支持領域に支持されている容器群の容器の並び順を変更することができる。
また、並べ替え装置は、容器移載装置を利用して構成しているため、容器を並べ替えるために移載装置との間で容器を移載する装置を別途備える必要がないため、搬送車の構成の簡素化を図ることができる。
According to this configuration, the container transfer device lifts in addition to transferring the top container of the container group from the support area and placing another container on the top container of the container group. The container one below the container lifted by the mechanism can be transferred from the support area, or another container can be placed on the container one below the lifted container. By combining the transfer of the container by these container transfer devices and the lifting of the container by the lifting mechanism, the arrangement order of the containers of the container group supported in the support area can be changed.
Further, since the sorting device is configured by using the container transfer device, it is not necessary to separately provide a device for transferring the container to and from the transfer device in order to rearrange the containers. It is possible to simplify the configuration of.
また、前記容器移載装置は、前記支持体を昇降自在に備えると共に、移載対象の前記棚部に対応する移載用高さに前記支持体を昇降させた状態で、当該棚部に対して前記容器を出し入れするように構成され、最下段の前記棚部に対応する前記移載用高さが、前記支持領域において最も下側に配置される前記容器よりも低い位置で、前記容器を前記支持体によって支持する高さに設定されていると好適である。 Further, the container transfer device is provided with the support so as to be able to move up and down, and the support is raised and lowered to a transfer height corresponding to the shelf to be transferred, and the support is raised and lowered with respect to the shelf. The container is placed at a position where the transfer height corresponding to the shelf portion at the bottom is lower than the container arranged at the lowermost side in the support area. It is preferable that the height is set to be supported by the support.
この構成によれば、最下段の棚部に対して容器を出し入れするときの支持体の高さを比較的低い高さにできる。そのため、棚部の最下段の高さを低くでき、容器棚における上下方向に並ぶ棚部の段数を増やすことができる等、容器棚の収納効率を高めることができる。 According to this configuration, the height of the support when the container is taken in and out of the lowermost shelf can be set to a relatively low height. Therefore, the height of the bottom of the shelves can be lowered, the number of shelves arranged in the vertical direction in the container shelves can be increased, and the storage efficiency of the container shelves can be improved.
搬送設備は、搬送車を複数備え、
複数の前記容器棚と、複数の前記搬送車の走行経路を設定する制御装置と、を備え、棚奥行方向に隣接する2つの前記容器棚の間に形成される前記搬送車の通路を棚間通路として、複数の前記容器棚は、前記棚間通路が複数形成されるように配置され、前記制御装置は、前記棚間通路のそれぞれにおける前記搬送車の走行方向が一方向となるように前記搬送車のそれぞれの走行経路を設定する。
The transport equipment is equipped with multiple transport vehicles.
A plurality of the container shelves and a control device for setting a traveling route of the plurality of the transport vehicles are provided, and a passage of the transport vehicle formed between two container shelves adjacent to each other in the shelf depth direction is provided between the shelves. As the passages, the plurality of container shelves are arranged so that a plurality of the inter-shelf passages are formed, and the control device is such that the traveling direction of the transport vehicle in each of the inter-shelf passages is one direction. Set each travel route of the transport vehicle.
この構成によれば、2つの容器棚の間に棚間通路を形成することで、棚間通路を走行する搬送車は、走行経路に対して直交する方向の両側に存在する2つの容器棚の双方との間で容器を出し入れすることができる。また、搬送車の走行方向が一方向となるように走行経路が設定されているため、複数の搬送車を円滑に走行させることができる。 According to this configuration, by forming the inter-shelf passage between the two container shelves, the transport vehicle traveling in the inter-shelf passage has two container shelves existing on both sides in the direction orthogonal to the traveling path. Containers can be taken in and out of both sides. Further, since the traveling route is set so that the traveling direction of the transport vehicle is one direction, a plurality of transport vehicles can be smoothly traveled.
本開示に係る技術は、容器を搬送する搬送車に利用することができる。 The technology according to the present disclosure can be used for a transport vehicle for transporting a container.
1:容器棚
2:搬送車
11:棚部
12:棚間通路
22:支持領域
24:容器移載装置
25:持ち上げ機構
26:物品移載装置
27:認識装置
48:支持体
60:移載部
68:並び換え装置
H:制御装置
W:容器
WG:容器群
Z:上下方向
1: Container shelf 2: Transport vehicle 11: Shelf 12: Inter-shelf passage 22: Support area 24: Container transfer device 25: Lifting mechanism 26: Article transfer device 27: Recognition device 48: Support 60: Transfer section 68: Sorting device H: Control device W: Container WG: Container group Z: Vertical direction
Claims (10)
前記容器を支持する支持領域と、
前記容器棚に対して前記容器を出し入れする容器移載装置と、
前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、
前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、
前記容器移載装置は、更に、前記支持領域に対しても前記容器を出し入れするように構成されている、搬送車。 A transport vehicle that transports the container by traveling along a container shelf provided with a plurality of shelves supporting the container in the vertical direction.
A support area that supports the container and
A container transfer device for moving the container in and out of the container shelf,
The container in at least one state of the container in the first state, which is the container supported by the support region, and the container in the second state, which is the container supported by the container transfer device. A recognition device that recognizes the items contained in the container,
The article transfer device for transferring the article recognized by the recognition device between the container in the first state and the container in the second state is provided.
The container transfer device is a transport vehicle that is further configured to move the container in and out of the support area.
前記物品移載装置は、前記認識装置により認識された物品を前記第一状態の容器から前記第二状態の容器に移載する請求項1記載の搬送車。 The recognition device recognizes the article contained in the container in the first state and recognizes the article.
The transport vehicle according to claim 1, wherein the article transfer device transfers an article recognized by the recognition device from the container in the first state to the container in the second state.
前記物品移載装置は、前記認識装置により認識された物品を前記第二状態の容器から前記第一状態の容器に移載する請求項1又は2に記載の搬送車。 The recognition device recognizes the article contained in the container in the second state and recognizes the article.
The transport vehicle according to claim 1 or 2 , wherein the article transfer device transfers an article recognized by the recognition device from the container in the second state to the container in the first state.
前記物品移載装置は、前記容器の開口部から前記容器に収容された物品を保持して取り出すように構成されている請求項1から3のいずれか一項に記載の搬送車。 The container transfer device is configured to hold the outer surface of the container and move the container.
The transport vehicle according to any one of claims 1 to 3 , wherein the article transfer device is configured to hold and take out the articles contained in the container from the opening of the container.
前記支持領域は、複数の前記容器を段積み状態で支持可能であり、
前記支持領域に段積みされた容器群の前記容器の並び順を換える並び換え装置を更に備え、
前記容器群の最上段に位置する前記容器が、前記第一状態の容器である請求項1から4のいずれか一項に記載の搬送車。 The container is configured to be stackable in the vertical direction.
The support area can support a plurality of the containers in a stacked state, and can support the plurality of containers in a stacked state.
Further provided with a rearranging device for changing the rearrangement order of the containers of the container group stacked in the support area.
The transport vehicle according to any one of claims 1 to 4 , wherein the container located at the uppermost stage of the container group is the container in the first state.
前記容器を支持する支持領域と、
前記容器棚に対して前記容器を出し入れする容器移載装置と、
前記支持領域に支持された状態の前記容器である第一状態の容器、及び、前記容器移載装置に支持された状態の前記容器である第二状態の容器の、少なくとも一方の状態の前記容器に収容されている物品を認識する認識装置と、
前記認識装置により認識された物品を前記第一状態の容器と前記第二状態の容器との間で移載する物品移載装置と、を備え、
前記容器は、前記上下方向に段積み可能に構成され、
前記支持領域は、複数の前記容器を段積み状態で支持可能であり、
前記支持領域に段積みされた容器群の前記容器の並び順を換える並び換え装置を更に備え、
前記容器群の最上段に位置する前記容器が、前記第一状態の容器である、搬送車。 A transport vehicle that transports the container by traveling along a container shelf provided with a plurality of shelves supporting the container in the vertical direction.
A support area that supports the container and
A container transfer device for moving the container in and out of the container shelf,
The container in at least one state of the container in the first state, which is the container supported by the support region, and the container in the second state, which is the container supported by the container transfer device. A recognition device that recognizes the items contained in the container,
The article transfer device for transferring the article recognized by the recognition device between the container in the first state and the container in the second state is provided.
The container is configured to be stackable in the vertical direction.
The support area can support a plurality of the containers in a stacked state, and can support the plurality of containers in a stacked state.
Further provided with a rearranging device for changing the rearrangement order of the containers of the container group stacked in the support area.
A transport vehicle in which the container located at the uppermost stage of the container group is the container in the first state.
前記移載部は、前記棚部と前記支持体との間での前記容器の移載と、前記支持体と前記支持領域との間での前記容器の移載とを行う請求項5又は6に記載の搬送車。 The container transfer device includes a support for supporting the container and a transfer unit for transferring the container.
Claim 5 or 6 in which the transfer section performs the transfer of the container between the shelf and the support and the transfer of the container between the support and the support area. The transport vehicle described in.
前記並べ換え装置は、前記持ち上げ機構と前記容器移載装置とを備えている請求項7に記載の搬送車。 Further provided is a lifting mechanism for lifting the container at an arbitrary height in the container group stacked in the support region with respect to the container below the container group.
The transport vehicle according to claim 7 , wherein the rearranging device includes the lifting mechanism and the container transfer device.
最下段の前記棚部に対応する前記移載用高さが、前記支持領域において最も下側に配置される前記容器よりも低い位置で、前記容器を前記支持体によって支持する高さに設定されている請求項7又は8に記載の搬送車。 The container transfer device is provided with the support so as to be able to move up and down, and the support is raised and lowered to a transfer height corresponding to the shelf to be transferred, and the support is raised and lowered with respect to the shelf. It is configured to put the container in and out,
The transfer height corresponding to the shelf portion at the bottom is set to a height at which the container is supported by the support at a position lower than the container arranged at the lowermost side in the support region. The transport vehicle according to claim 7 or 8.
複数の前記容器棚と、複数の前記搬送車の走行経路を設定する制御装置と、を備え、
棚奥行方向に隣接する2つの前記容器棚の間に形成される前記搬送車の通路を棚間通路として、複数の前記容器棚は、前記棚間通路が複数形成されるように配置され、
前記制御装置は、前記棚間通路のそれぞれにおける前記搬送車の走行方向が一方向となるように前記搬送車のそれぞれの走行経路を設定する搬送設備。 A transport facility provided with a plurality of transport vehicles according to any one of claims 1 to 9.
A plurality of the container shelves and a control device for setting a traveling route of the plurality of the transport vehicles are provided.
The passage of the transport vehicle formed between the two container shelves adjacent to each other in the shelf depth direction is used as an inter-shelf passage, and the plurality of container shelves are arranged so that a plurality of the inter-shelf passages are formed.
The control device is a transport facility that sets each travel path of the transport vehicle so that the travel direction of the transport vehicle in each of the inter-shelf passages is one direction.
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171257A JP6965646B2 (en) | 2017-09-06 | 2017-09-06 | Transport vehicle and transport equipment |
| US16/644,000 US11338997B2 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| PCT/JP2018/028586 WO2019049557A1 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| EP21198940.5A EP3957580B1 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| KR1020207006715A KR102636990B1 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport equipment |
| ES18853387T ES2916705T3 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| ES21198940T ES2987850T3 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| EP18853387.1A EP3663235B1 (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| CN201880058036.1A CN111032536B (en) | 2017-09-06 | 2018-07-31 | Transport vehicle and transport facility |
| TW107127026A TWI774810B (en) | 2017-09-06 | 2018-08-03 | Transport vehicle and transport facility |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017171257A JP6965646B2 (en) | 2017-09-06 | 2017-09-06 | Transport vehicle and transport equipment |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019043753A JP2019043753A (en) | 2019-03-22 |
| JP2019043753A5 JP2019043753A5 (en) | 2019-05-09 |
| JP6965646B2 true JP6965646B2 (en) | 2021-11-10 |
Family
ID=65633974
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017171257A Active JP6965646B2 (en) | 2017-09-06 | 2017-09-06 | Transport vehicle and transport equipment |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US11338997B2 (en) |
| EP (2) | EP3957580B1 (en) |
| JP (1) | JP6965646B2 (en) |
| KR (1) | KR102636990B1 (en) |
| CN (1) | CN111032536B (en) |
| ES (2) | ES2987850T3 (en) |
| TW (1) | TWI774810B (en) |
| WO (1) | WO2019049557A1 (en) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2952517T3 (en) * | 2015-09-11 | 2023-10-31 | Berkshire Grey Operating Company Inc | Robotic systems and methods for identifying and processing various objects |
| US9937532B2 (en) | 2015-12-18 | 2018-04-10 | Berkshire Grey Inc. | Perception systems and methods for identifying and processing a variety of objects |
| KR102568707B1 (en) * | 2018-03-02 | 2023-08-22 | 삼성전자주식회사 | Automated guided vehicle with multi-stage loading structure |
| EP3797081A2 (en) * | 2018-05-22 | 2021-03-31 | Pick8Ship Technology AG | Cargo receptacle and cargo logistics method |
| US11623826B2 (en) * | 2018-11-09 | 2023-04-11 | Walmart Apollo, Llc | System having robotic workstation |
| CN110040412A (en) * | 2019-04-24 | 2019-07-23 | 深圳市海柔创新科技有限公司 | Intelligent warehousing system, processing terminal, storage robot and intelligent storage method |
| CH716348A1 (en) * | 2019-06-27 | 2020-12-30 | Rotzinger Ag | Loading device for multi-lane loading of pick-and-place devices. |
| JP7401285B2 (en) * | 2019-12-17 | 2023-12-19 | 株式会社オカムラ | automatic warehouse system |
| CN113183847B (en) * | 2020-01-14 | 2023-06-02 | 明创能源股份有限公司 | Self-propelled transport vehicle for distributed real-time transmission and distribution system and standard container for the transport vehicle |
| US12129122B2 (en) * | 2020-05-13 | 2024-10-29 | Hds Mercury, Inc. | Modular inventory handling system and method |
| US11978012B2 (en) | 2020-10-28 | 2024-05-07 | United Parcel Service Of America, Inc. | Locating, identifying, and shifting objects in automated or semi-automated fashion including during transit |
| US11887048B2 (en) * | 2020-10-28 | 2024-01-30 | United Parcel Service Of America, Inc. | Locating, identifying, and shifting objects in automated or semi-automated fashion including during transit |
| JP7306364B2 (en) * | 2020-11-10 | 2023-07-11 | 株式会社ダイフク | carrier |
| NO346544B1 (en) * | 2020-11-30 | 2022-09-26 | Autostore Tech As | A remotely operated picking vehicle, an automated storage and retrieval system, and a method of handling products in the system |
| WO2022255550A1 (en) * | 2021-05-31 | 2022-12-08 | 주식회사 가치소프트 | Article loading system and method for receiving and dispatching articles using same |
| WO2022255551A1 (en) * | 2021-05-31 | 2022-12-08 | 주식회사 가치소프트 | Automatic picking system and box storing and releasing method using same |
| KR102723044B1 (en) * | 2021-05-31 | 2024-10-28 | 주식회사 가치소프트 | System for loading goods and method for receiving and delivering goods using the system |
| WO2023054763A1 (en) * | 2021-09-30 | 2023-04-06 | 주식회사 가치소프트 | System and method for loading and automatically dispensing articles |
| KR102604646B1 (en) * | 2021-12-28 | 2023-11-23 | 에스아이에스(주) | Autonomous transport mobility |
| DE102022125195A1 (en) | 2022-09-29 | 2024-04-04 | Hänel GmbH & Co. KG | TABLE, STORAGE SHELF AND METHOD FOR AUTOMATIC LOADING AND UNLOADING OF STORED GOODS |
| GB202214365D0 (en) * | 2022-09-30 | 2022-11-16 | Ocado Innovation Ltd | Systems, methods and devices for stock management |
| GB202214374D0 (en) * | 2022-09-30 | 2022-11-16 | Ocado Innovation Ltd | Systems, methods and devices for stock management |
| WO2024150199A1 (en) * | 2023-05-09 | 2024-07-18 | Martistel Innovation Fzco | Storage and sorting system and means for its organization and operation |
| WO2025056148A1 (en) * | 2023-09-12 | 2025-03-20 | Stow Robotics Gmbh | Automated storage system |
| GB2633641A (en) * | 2023-09-18 | 2025-03-19 | Shoalter Automation Ltd | A mobile automated container handling device and method |
| KR102627234B1 (en) * | 2023-11-16 | 2024-01-19 | 주식회사 제이케이글로벌 | Apparatus for automatically supplying raw material in first-in, first-out |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4926979B1 (en) | 1966-05-09 | 1974-07-13 | Brother Ind Ltd | |
| JPS5229868B2 (en) * | 1972-07-07 | 1977-08-04 | ||
| JPS543013B2 (en) | 1975-02-03 | 1979-02-16 | ||
| JPS5726911A (en) | 1980-07-25 | 1982-02-13 | Toshiba Corp | Amplifier |
| US4492504A (en) * | 1981-12-07 | 1985-01-08 | Bell & Howell Company | Materials handling system |
| EP0235488B1 (en) * | 1986-09-19 | 1990-01-24 | REDOUTE CATALOGUE Société Anonyme: | Robotic handling system |
| JPS62259905A (en) * | 1986-05-06 | 1987-11-12 | Daifuku Co Ltd | Warehouse equipment |
| FR2624496B1 (en) * | 1987-12-11 | 1990-03-23 | Renault | ROBOTIC HANDLING DEVICE FOR FITTING A STORAGE STORE |
| JP2902507B2 (en) * | 1991-08-09 | 1999-06-07 | 株式会社竹中工務店 | Picking robot |
| JPH06115614A (en) * | 1992-10-02 | 1994-04-26 | Sumitomo Heavy Ind Ltd | Automatic picking device |
| JP3381448B2 (en) * | 1995-03-07 | 2003-02-24 | 日本鋼管株式会社 | Container stacking sorting device |
| JPH11207673A (en) * | 1998-01-29 | 1999-08-03 | Mitsubishi Electric Corp | Controller for loading robot |
| JP2004277062A (en) | 2003-03-14 | 2004-10-07 | Matsushita Electric Ind Co Ltd | Warehouse system using unmanned carrier and carrying-in/out method of warehouse |
| US7524926B2 (en) | 2005-01-20 | 2009-04-28 | Biomarck Pharmaceuticals, Ltd. | Mucin hypersecretion inhibitors and methods of use |
| FI126245B (en) * | 2005-03-09 | 2016-08-31 | Konecranes Finland Oy | Procedure for placing a palletless goods package on a warehouse shelf and handing it over therefrom and administering the package logistics and equipment for carrying out the procedure |
| JP4552766B2 (en) * | 2005-06-10 | 2010-09-29 | 株式会社ダイフク | Goods storage facility |
| JP4973747B2 (en) * | 2010-02-24 | 2012-07-11 | ムラテックオートメーション株式会社 | Transport vehicle system |
| US8403614B2 (en) * | 2010-03-24 | 2013-03-26 | Bastian Solutions, Llc | Robotic automated storage and retrieval system mixed pallet build system |
| JP5725369B2 (en) | 2011-12-27 | 2015-05-27 | 株式会社ダイフク | Storage equipment |
| WO2013150859A1 (en) * | 2012-04-05 | 2013-10-10 | 村田機械株式会社 | Conveyance system |
| JP6123577B2 (en) * | 2013-08-23 | 2017-05-10 | 株式会社ダイフク | Automatic picking equipment |
| US20150098775A1 (en) * | 2013-10-09 | 2015-04-09 | Sergey N. Razumov | Automatic order picking system and method in retail facility |
| WO2016210126A1 (en) * | 2015-06-24 | 2016-12-29 | Hds Mercury, Inc. | Mobile robot loader-unloader system and method |
| DE102015220091A1 (en) | 2015-10-15 | 2017-04-20 | Jungheinrich Aktiengesellschaft | Autonomous order picker |
| CN105346913A (en) * | 2015-11-13 | 2016-02-24 | 上海诺力智能科技有限公司 | Automatic guide sorting system and method |
| JP6485333B2 (en) | 2015-11-18 | 2019-03-20 | 株式会社ダイフク | Article transfer device and article transfer equipment |
| CN205771314U (en) * | 2016-05-25 | 2016-12-07 | 广州宝丰冷冻仓储有限公司 | Band has the shelf of check system function shuttle |
| US10227176B2 (en) * | 2016-09-05 | 2019-03-12 | Kabushiki Kaisha Toshiba | Picking apparatus |
| CN206265699U (en) * | 2016-12-13 | 2017-06-20 | 东莞市创丰科技发展有限公司 | A fully automatic three-dimensional storage system |
-
2017
- 2017-09-06 JP JP2017171257A patent/JP6965646B2/en active Active
-
2018
- 2018-07-31 WO PCT/JP2018/028586 patent/WO2019049557A1/en unknown
- 2018-07-31 ES ES21198940T patent/ES2987850T3/en active Active
- 2018-07-31 ES ES18853387T patent/ES2916705T3/en active Active
- 2018-07-31 EP EP21198940.5A patent/EP3957580B1/en active Active
- 2018-07-31 US US16/644,000 patent/US11338997B2/en active Active
- 2018-07-31 CN CN201880058036.1A patent/CN111032536B/en active Active
- 2018-07-31 KR KR1020207006715A patent/KR102636990B1/en active Active
- 2018-07-31 EP EP18853387.1A patent/EP3663235B1/en active Active
- 2018-08-03 TW TW107127026A patent/TWI774810B/en active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI774810B (en) | 2022-08-21 |
| EP3663235A1 (en) | 2020-06-10 |
| US20210061563A1 (en) | 2021-03-04 |
| ES2987850T3 (en) | 2024-11-18 |
| JP2019043753A (en) | 2019-03-22 |
| EP3957580A1 (en) | 2022-02-23 |
| EP3663235A4 (en) | 2021-04-21 |
| KR102636990B1 (en) | 2024-02-14 |
| EP3663235B1 (en) | 2022-05-04 |
| WO2019049557A1 (en) | 2019-03-14 |
| US11338997B2 (en) | 2022-05-24 |
| KR20200050973A (en) | 2020-05-12 |
| CN111032536B (en) | 2022-03-25 |
| EP3957580C0 (en) | 2024-08-21 |
| CN111032536A (en) | 2020-04-17 |
| EP3957580B1 (en) | 2024-08-21 |
| TW201912539A (en) | 2019-04-01 |
| ES2916705T3 (en) | 2022-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6965646B2 (en) | Transport vehicle and transport equipment | |
| JP6838512B2 (en) | Transport vehicle and transport equipment | |
| CN114455234B (en) | Transport vehicle and transport apparatus | |
| JP6593270B2 (en) | Goods transport equipment | |
| US12202716B2 (en) | Transfer device | |
| KR102777434B1 (en) | Pallect magazine and box transport system equipped with this | |
| JP7044182B2 (en) | Transport vehicle | |
| JP4411537B2 (en) | Collecting equipment | |
| JP2005343605A (en) | Container supply carrying-out device and its method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190221 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210317 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210629 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210921 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211004 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6965646 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |