JP6910512B1 - 内燃機関の制御装置 - Google Patents
内燃機関の制御装置 Download PDFInfo
- Publication number
- JP6910512B1 JP6910512B1 JP2020122582A JP2020122582A JP6910512B1 JP 6910512 B1 JP6910512 B1 JP 6910512B1 JP 2020122582 A JP2020122582 A JP 2020122582A JP 2020122582 A JP2020122582 A JP 2020122582A JP 6910512 B1 JP6910512 B1 JP 6910512B1
- Authority
- JP
- Japan
- Prior art keywords
- estimated value
- calculation cycle
- air amount
- throttle
- intake
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002485 combustion reaction Methods 0.000 title claims abstract description 66
- 230000004044 response Effects 0.000 claims abstract description 39
- 238000000034 method Methods 0.000 claims abstract description 20
- 230000008569 process Effects 0.000 claims abstract description 16
- 239000002699 waste material Substances 0.000 claims abstract description 14
- 238000012545 processing Methods 0.000 claims description 122
- 239000000446 fuel Substances 0.000 claims description 87
- 238000002347 injection Methods 0.000 claims description 45
- 239000007924 injection Substances 0.000 claims description 45
- 238000001514 detection method Methods 0.000 claims description 36
- 230000008859 change Effects 0.000 claims description 24
- 230000001934 delay Effects 0.000 claims description 22
- 238000010586 diagram Methods 0.000 abstract description 11
- 238000012937 correction Methods 0.000 description 14
- 239000007789 gas Substances 0.000 description 13
- 230000006399 behavior Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 5
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000001052 transient effect Effects 0.000 description 4
- 239000000498 cooling water Substances 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 239000000567 combustion gas Substances 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



















Landscapes
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Abstract
Description
前記内燃機関の吸気マニホールドの入口に設けられたスロットルの目標開度を算出する目標開度算出部と、
吸気行程から排気行程までの前記4サイクルの期間を気筒数に均等分割した気筒数の期間を、気筒数の演算サイクルとし、前記目標開度に対して、1以上の自然数に設定された遅延数の演算サイクルの期間だけ遅らせて出力する無駄時間処理を行って、遅延数の演算サイクル遅れ後の目標開度を算出する目標開度遅れ処理部と、
前記スロットルの実開度が前記遅延数の演算サイクル遅れ後の目標開度に追従するにように、前記スロットルを駆動するスロットル制御部と、
前記遅延数の演算サイクル遅れ後の目標開度に対する前記実開度の応答遅れを模擬したスロットル応答遅れ処理を、前記目標開度に対して行って、遅延数の演算サイクル先までの実開度の推定値を算出する開度予測部と、
実開度及び吸気マニホールド内圧力に基づいてスロットル通過空気量の推定値を算出するスロットル空気量演算処理、吸気マニホールド内圧力に基づいて気筒吸入空気量の推定値を算出する気筒空気量演算処理、スロットル通過空気量及び気筒吸入空気量に基づいて吸気マニホールド内空気量及び吸気マニホールド内圧力の推定値を算出するマニホールド内空気演算処理を用い、
前記遅延数の演算サイクル先までの実開度の推定値に基づいて、遅延数の演算サイクル先までの、吸気マニホールド内空気量の推定値、吸気マニホールド内圧力の推定値、スロットル通過空気量の推定値、及び気筒吸入空気量の推定値を算出し、算出結果に基づいて、遅延数の演算サイクル先の気筒吸入空気量の推定値を算出する吸気量予測部と、
を備えたものである。
実施の形態に係る内燃機関の制御装置50(以下、単に制御装置50と称す)について図面を参照して説明する。図1及び図2は、本実施の形態に係る内燃機関1及び制御装置50の概略構成図であり、図3は、本実施の形態に係る制御装置50のブロック図である。内燃機関1及び制御装置50は、車両に搭載され、内燃機関1は、車両(車輪)の駆動力源となる。
まず、内燃機関1の構成について説明する。図1に示すように、内燃機関1は、空気と燃料の混合気を燃焼する燃焼室7(以下、気筒7と称す)を備えている。内燃機関1は、気筒7に空気を供給する吸気管23と、気筒7で燃焼した排気ガスを排出する排気管17とを備えている。内燃機関1は、ガソリンエンジンとされている。内燃機関1は、吸気管23を開閉するスロットルバルブ4(以下、単に、スロットル4とも称す)を備えている。スロットル4の下流側の吸気管23の部分は、吸気マニホールド12である。よって、スロットル4は、吸気マニホールド12の入口に設けられている。スロットル4は、制御装置50により制御される電気モータにより開閉駆動される電子制御式スロットルバルブである。スロットル4には、スロットルの開度に応じた電気信号を出力するスロットル開度センサ19が設けられている。
次に、制御装置50について説明する。制御装置50は、内燃機関1を制御対象とする制御装置である。図3に示すように、制御装置50は、運転状態検出部51、演算サイクル算出部52、目標開度算出部53、目標開度遅れ処理部54、スロットル制御部55、開度予測部56、吸気量予測部57、及び燃料制御部58等の機能部を備えている。制御装置50の各機能部51〜58等は、制御装置50が備えた処理回路により実現される。具体的には、制御装置50は、図4に示すように、処理回路として、CPU(Central Processing Unit)等の演算処理装置90(コンピュータ)、演算処理装置90とデータのやり取りする記憶装置91、演算処理装置90に外部の信号を入力する入力回路92、及び演算処理装置90から外部に信号を出力する出力回路93等を備えている。
運転状態検出部51は、各種のセンサの出力信号等に基づいて各種の運転状態を検出する。例えば、運転状態検出部51は、大気圧センサ33の出力信号に基づいて大気圧を検出し、空気流量検出センサ3の出力信号に基づいてスロットル通過空気流量を検出し、吸入空気温度センサ3aの出力信号に基づいて吸入空気温度(外気温度)を検出し、スロットル開度センサ19の出力信号に基づいて実開度を検出し、マニホールド圧力センサ8の出力信号に基づいて吸気マニホールド内圧力を検出し、マニホールド温度センサ8aの出力信号に基づいて吸気マニホールド内温度を検出し、空燃比センサ18の出力信号に基づいて排気ガスの空燃比を検出し、アクセルポジションセンサ26の出力信号に基づいてアクセルポジションを検出する。各センサの出力信号は、各センサの検出周期(例えば、5ms)でA/D変換され、各運転状態が検出される。
吸気行程から排気行程までの4サイクルの期間を気筒数に均等分割した気筒数の期間が、気筒数の演算サイクルに設定されている。本実施の形態では、図5に示すように、気筒数は、3つであるので、4サイクルの期間を3つに均等分割した3つの期間が、3つの演算サイクルに設定されている。各演算サイクルは、240度のクランク角度間隔に設定されている。第1気筒を基準にすると、第1の演算サイクルは、第1気筒の吸気行程の上死点から第1気筒の圧縮行程の上死点後60度までの240度の角度間隔であり、第2の演算サイクルは、第1気筒の圧縮行程の上死点後60度から第1気筒の燃焼行程の上死点後120度までの240度の角度間隔に設定され、第3の演算サイクルは、第1気筒の燃焼行程の上死点後120度から第1気筒の吸気行程の上死点までの240度の角度間隔に設定される。
制御装置50は、演算サイクルの開始時点(本例では、各気筒の吸気行程の上死点)に対応する第1クランク角センサ11の出力信号の立上り又は立下りを検出した時に、演算サイクルの開始時点を検出したと判定し、演算サイクル毎の処理を実行する。
図5に示すように、第1気筒の排気行程に対応する演算サイクルの開始時点で、第1気筒の燃料噴射量を算出する。従来の技術では、燃料噴射量の算出に用いる気筒吸入空気量は、排気行程に対応する演算サイクルの1つ前の演算サイクルの期間において検出したスロットル通過空気量に基づいて算出される。すなわち、第1気筒の吸気行程に対応する演算サイクルよりも2つ前の演算サイクルの期間において検出したスロットル通過空気量、及びスロットル通過空気量に基づいて算出した気筒吸入空気量に基づいて、第1気筒の燃料噴射量が算出される。
演算サイクル算出部52は、演算サイクルの開始時点で、前回の演算サイクルの開始時点から、現在の演算サイクルの開始時点までの期間(以下、現在の演算サイクルの期間Tcyl(n)と称す)を検出する。

目標開度算出部53は、スロットルの目標開度Vthoを算出する。目標開度算出部53は、内燃機関1に要求されている要求出力トルクを実現する目標吸入空気量を算出し、目標吸入空気量を実現する目標開度Vthoを算出する。
目標開度遅れ処理部54は、目標開度Vthoに対して、1以上の自然数に設定された遅延数の演算サイクルの期間だけ遅らせて出力する無駄時間処理を行って、遅延数の演算サイクル遅れ後の目標開度Vthodlyを算出する。本実施の形態では、遅延数は、2つに設定されている。目標開度遅れ処理部54は、目標開度Vthoに対して、2つの演算サイクルの期間だけ遅らせて出力する無駄時間処理を行って、2つの演算サイクル遅れ後の目標開度Vthodlyを算出する。
スロットル制御部55は、スロットルの実開度の検出値Vthdが、2つの演算サイクル遅れ後の目標開度Vthodlyに追従するにように、スロットル4(電気モータ)を駆動するフィードバック制御を行う。すなわち、2つの演算サイクル遅れ後の目標開度Vthodlyが、フィードバック制御の最終的な目標開度に設定されている。例えば、スロットル制御部55は、実開度の検出値Vthdと2つの演算サイクル遅れ後の目標開度Vthodlyとの偏差に応じたPID制御等により、電気モータへの通電電流を増減する。
開度予測部56は、2つの演算サイクル遅れ後の目標開度Vthodlyに対する実開度の応答遅れを模擬したスロットル応答遅れ処理を、目標開度Vthoに対して行って、2つの演算サイクル先までの実開度の推定値を算出する。
開度予測部56は、各演算サイクルの開始時点で、吸気量予測部57に2つの演算サイクル先までの実開度の推定値を出力する。本実施の形態では、開度予測部56は、各演算サイクルの開始時点で、直前のタイマ演算周期で算出された、2つの演算サイクル先の実開度の推定値Vthe2、1つの演算サイクル先の実開度の推定値Vthe1、現在の実開度の推定値Vthe0を、吸気量予測部57に出力する。
吸気量予測部57は、実開度及び吸気マニホールド内圧力に基づいてスロットル通過空気量の推定値を算出するスロットル空気量演算処理、吸気マニホールド内圧力に基づいて気筒吸入空気量の推定値を算出する気筒空気量演算処理、スロットル通過空気量及び気筒吸入空気量に基づいて吸気マニホールド内空気量及び吸気マニホールド内圧力の推定値を算出するマニホールド内空気演算処理を用い、2つの演算サイクル先までの実開度の推定値に基づいて、2つの演算サイクル先までの、吸気マニホールド内空気量の推定値、吸気マニホールド内圧力の推定値、スロットル通過空気量の推定値、及び気筒吸入空気量の推定値を算出し、算出結果に基づいて、2つの演算サイクル先の気筒吸入空気量の推定値を算出する。
図13に示すように、本実施の形態では、吸気量予測部57は、演算サイクルの開始時点で、現在の吸気マニホールド内圧力の検出値Pbd(n)に基づいて、現在の吸気マニホールド内空気量の推定値Gbe(n)を算出する。
そして、吸気量予測部57は、式(13)に示すように、現在の吸気マニホールド内空気量の推定値Gbe(n)に対して、現在のスロットル通過空気量の推定値Gthe(n)を加算すると共に、現在の気筒吸入空気量の推定値Gce(n)を減算して、1つの演算サイクル先の吸気マニホールド内空気量の推定値Gbe(n+1)を算出する。
そして、吸気量予測部57は、式(18)に示すように、1つの演算サイクル先の吸気マニホールド内空気量の推定値Gbe(n+1)に対して、1つの演算サイクル先のスロットル通過空気量の推定値Gthe(n+1)を加算すると共に、1つの演算サイクル先の気筒吸入空気量の推定値Gce(n+1)を減算して、2つの演算サイクル先の吸気マニホールド内空気量の推定値Gbe(n+2)を算出する。
吸気量予測部57は、式(22)に示すように、2つの演算サイクル先のスロットル通過空気量の推定値Gthe(n+2)から現在のスロットル通過空気量の推定値Gthe(n)を減算した空気量偏差を、現在のスロットル通過空気量の検出値Gthd(n)に加算して、センサ基準の2つの演算サイクル先のスロットル通過空気量の推定値Gthes2(n)を算出する。
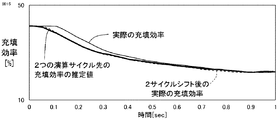
図14に、目標開度を増加させた場合の推定挙動を示し、図15に、目標開度を減少させた場合の推定挙動を示す。図14及び図15には、気筒吸入空気量を充填効率に変換した値を示している。図14及び図15には、実際に気筒に吸入された気筒吸入空気量(実際の充填効率)と、吸気行程よりも2つの演算サイクル前のタイミングで算出される、2つの演算サイクル先の気筒吸入空気量の推定値Gce2(n)(充填効率の推定値)と、実際の気筒吸入空気量(実際の充填効率)を2つの演算サイクルの期間だけ前に時間シフトした値(2サイクルシフト後の実際の充填効率と称す)と、を示している。図14及び図15に示すように、充填効率の推定値は、2サイクルシフト後の実際の充填効率と概ね一致しており、充填効率の推定値により、2つの演算サイクル先の実際の充填効率を精度よく推定できていることがわかる。よって、2つの演算サイクル先の気筒吸入空気量の推定値Gce2(n)に基づいて燃料噴射量を算出し、インジェクタを駆動すれば、実際の気筒吸入空気量に合った燃料量を気筒に供給することができる。
燃料制御部58は、2つの演算サイクル先の気筒吸入空気量の推定値Gce2(n)に基づいて、燃料噴射量を算出し、燃料噴射量に基づいて、対象気筒に燃料を供給するインジェクタを駆動する。図5を用いて上述したように、燃料制御部58は、各気筒の排気行程でインジェクタを駆動する。燃料制御部58は、対象気筒の排気行程に対応する演算サイクルの開始時点で算出した、2つの演算サイクル先の気筒吸入空気量の推定値Gce2(n)に基づいて、対象気筒の燃料噴射量を算出し、対象気筒の排気行程で、算出した燃料噴射量に基づいて、対象気筒のインジェクタを駆動する。例えば、燃料制御部58は、気筒吸入空気量の推定値を、目標空燃比で除算して、燃料噴射量を算出する。
実施の形態2に係る制御装置50について説明する。上記の実施の形態1と同様の構成部分は説明を省略する。本実施の形態に係る内燃機関1及び制御装置50の基本的な構成は実施の形態1と同様であるが、吸気行程でインジェクタ13が駆動され、遅延数が1つに設定されている点が実施の形態1と異なる。
図20に示すように、本実施の形態では、吸気量予測部57は、演算サイクルの開始時点で、現在の吸気マニホールド内圧力の検出値Pbd(n)に基づいて、現在の吸気マニホールド内空気量の推定値Gbe(n)を算出する。
実施の形態1と同様に、吸気量予測部57は、式(13)に示すように、現在の吸気マニホールド内空気量の推定値Gbe(n)に対して、現在のスロットル通過空気量の推定値Gthe(n)を加算すると共に、現在の気筒吸入空気量の推定値Gce(n)を減算して、1つの演算サイクル先の吸気マニホールド内空気量の推定値Gbe(n+1)を算出する。
吸気量予測部57は、式(28)に示すように、1つの演算サイクル先のスロットル通過空気量の推定値Gthe(n+1)から現在のスロットル通過空気量の推定値Gthe(n)を減算した空気量偏差を、現在のスロットル通過空気量の検出値Gthd(n)に加算して、センサ基準の1つの演算サイクル先のスロットル通過空気量の推定値Gthes1(n)を算出する。
目標開度遅れ処理部54は、インジェクタ13の駆動タイミングの変化に応じて、遅延数を変化させてもよい。目標開度遅れ処理部54は、インジェクタ13の駆動タイミングが排気行程である場合は、遅延数を2つに設定し、インジェクタ13の駆動タイミングが吸気行程である場合は、遅延数を1つに設定し、インジェクタ13の駆動タイミングが圧縮行程である場合は、遅延数を0に設定する。
Claims (14)
- 複数の気筒を有する4サイクルの内燃機関を制御する内燃機関の制御装置であって、
前記内燃機関の吸気マニホールドの入口に設けられたスロットルの目標開度を算出する目標開度算出部と、
吸気行程から排気行程までの前記4サイクルの期間を気筒数に均等分割した気筒数の期間を、気筒数の演算サイクルとし、前記目標開度に対して、1以上の自然数に設定された遅延数の演算サイクルの期間だけ遅らせて出力する無駄時間処理を行って、遅延数の演算サイクル遅れ後の目標開度を算出する目標開度遅れ処理部と、
前記スロットルの実開度が前記遅延数の演算サイクル遅れ後の目標開度に追従するにように、前記スロットルを駆動するスロットル制御部と、
前記遅延数の演算サイクル遅れ後の目標開度に対する前記実開度の応答遅れを模擬したスロットル応答遅れ処理を、前記目標開度に対して行って、遅延数の演算サイクル先までの実開度の推定値を算出する開度予測部と、
実開度及び吸気マニホールド内圧力に基づいてスロットル通過空気量の推定値を算出するスロットル空気量演算処理、吸気マニホールド内圧力に基づいて気筒吸入空気量の推定値を算出する気筒空気量演算処理、スロットル通過空気量及び気筒吸入空気量に基づいて吸気マニホールド内空気量及び吸気マニホールド内圧力の推定値を算出するマニホールド内空気演算処理を用い、
前記遅延数の演算サイクル先までの実開度の推定値に基づいて、遅延数の演算サイクル先までの、吸気マニホールド内空気量の推定値、吸気マニホールド内圧力の推定値、スロットル通過空気量の推定値、及び気筒吸入空気量の推定値を算出し、算出結果に基づいて、遅延数の演算サイクル先の気筒吸入空気量の推定値を算出する吸気量予測部と、
を備えた内燃機関の制御装置。 - 前記吸気量予測部は、対象気筒の吸気行程に対応する演算サイクルの終了時点よりも、遅延数の演算サイクルだけ前の時点で、対象気筒について、前記遅延数の演算サイクル先の気筒吸入空気量の推定値を算出する請求項1に記載の内燃機関の制御装置。
- 前記遅延数の演算サイクル先の気筒吸入空気量の推定値に基づいて、燃料噴射量を算出し、前記燃料噴射量に基づいて、対象気筒に燃料を供給するインジェクタを駆動する燃料制御部を備えた請求項2に記載の内燃機関の制御装置。
- 前記燃料制御部は、各気筒の排気行程で前記インジェクタを駆動し、
前記遅延数は、2つに設定される請求項3に記載の内燃機関の制御装置。 - 前記燃料制御部は、各気筒の吸気行程で前記インジェクタを駆動し、
前記遅延数は、1つに設定される請求項3に記載の内燃機関の制御装置。 - 空気流量検出センサの出力信号に基づいて、スロットル通過空気量を検出し、圧力センサの出力信号に基づいて、吸気マニホールド内圧力を検出する運転状態検出部を備え、
前記吸気量予測部は、
前記スロットル空気量演算処理を用い、現在の実開度、及び現在の吸気マニホールド内圧力の検出値に基づいて、現在のスロットル通過空気量の推定値を算出し、
遅延数の演算サイクル先のスロットル通過空気量の推定値から前記現在のスロットル通過空気量の推定値を減算した空気量偏差を、前記現在のスロットル通過空気量の検出値に加算して、センサ基準の遅延数の演算サイクル先のスロットル通過空気量の推定値を算出し、
前記センサ基準の遅延数の演算サイクル先のスロットル通過空気量の推定値に対して、吸気マニホールドの応答遅れを模擬した吸気応答遅れ処理を行って、前記遅延数の演算サイクル先の気筒吸入空気量の推定値を算出する請求項1から5のいずれか一項に記載の内燃機関の制御装置。 - 圧力センサの出力信号に基づいて、吸気マニホールド内圧力を検出する運転状態検出部を備え、
前記遅延数は、2つに設定され、
前記開度予測部は、前記目標開度に対して前記スロットル応答遅れ処理を行った値に基づいて、2つの演算サイクル先の実開度の推定値、及び1つの演算サイクル先の実開度の推定値を算出し、
前記吸気量予測部は、
現在の吸気マニホールド内圧力の検出値に基づいて、現在の吸気マニホールド内空気量の推定値を算出し、
現在の実開度及び現在の吸気マニホールド内圧力の検出値に基づいて、現在のスロットル通過空気量の推定値を算出し、
現在の吸気マニホールド内圧力の検出値に基づいて、現在の気筒吸入空気量の推定値を算出し、
前記現在の吸気マニホールド内空気量の推定値に対して、前記現在のスロットル通過空気量の推定値を加算すると共に、前記現在の気筒吸入空気量の推定値を減算して、1つの演算サイクル先の吸気マニホールド内空気量の推定値を算出し、
前記1つの演算サイクル先の吸気マニホールド内空気量の推定値に基づいて、1つの演算サイクル先の吸気マニホールド内圧力の推定値を算出し、
前記1つの演算サイクル先の実開度の推定値、及び前記1つの演算サイクル先の吸気マニホールド内圧力の推定値に基づいて、1つの演算サイクル先のスロットル通過空気量の推定値を算出し、
前記1つの演算サイクル先の吸気マニホールド内圧力の推定値に基づいて、1つの演算サイクル先の気筒吸入空気量の推定値を算出し、
前記1つの演算サイクル先の吸気マニホールド内空気量の推定値に対して、前記1つの演算サイクル先のスロットル通過空気量の推定値を加算すると共に、前記1つの演算サイクル先の気筒吸入空気量の推定値を減算して、2つの演算サイクル先の吸気マニホールド内空気量の推定値を算出し、
前記2つの演算サイクル先の吸気マニホールド内空気量の推定値に基づいて、2つの演算サイクル先の吸気マニホールド内圧力の推定値を算出し、
前記2つの演算サイクル先の実開度の推定値、及び前記2つの演算サイクル先の吸気マニホールド内圧力の推定値に基づいて、2つの演算サイクル先のスロットル通過空気量の推定値を算出し、
前記2つの演算サイクル先のスロットル通過空気量の推定値に基づいて、2つの演算サイクル先の気筒吸入空気量の推定値を算出する請求項1から6のいずれか一項に記載の内燃機関の制御装置。 - 圧力センサの出力信号に基づいて、吸気マニホールド内圧力を検出する運転状態検出部を備え、
前記遅延数は、1つに設定され、
前記開度予測部は、前記目標開度に対して前記スロットル応答遅れ処理を行った値に基づいて、1つの演算サイクル先の実開度の推定値を算出し、
前記吸気量予測部は、
現在の吸気マニホールド内圧力の検出値に基づいて、現在の吸気マニホールド内空気量の推定値を算出し、
現在の実開度及び現在の吸気マニホールド内圧力の検出値に基づいて、現在のスロットル通過空気量の推定値を算出し、
現在の吸気マニホールド内圧力の検出値に基づいて、現在の気筒吸入空気量の推定値を算出し、
前記現在の吸気マニホールド内空気量の推定値に対して、前記現在のスロットル通過空気量の推定値を加算すると共に、前記現在の気筒吸入空気量の推定値を減算して、1つの演算サイクル先の吸気マニホールド内空気量の推定値を算出し、
前記1つの演算サイクル先の吸気マニホールド内空気量の推定値に基づいて、1つの演算サイクル先の吸気マニホールド内圧力の推定値を算出し、
前記1つの演算サイクル先の実開度の推定値、及び前記1つの演算サイクル先の吸気マニホールド内圧力の推定値に基づいて、1つの演算サイクル先のスロットル通過空気量の推定値を算出し、
前記1つの演算サイクル先のスロットル通過空気量の推定値に基づいて、1つの演算サイクル先の気筒吸入空気量の推定値を算出する請求項1から6のいずれか一項に記載の内燃機関の制御装置。 - 前記吸気量予測部は、各時点の吸気マニホールド内空気量の推定値、吸気マニホールド内圧力の推定値、スロットル通過空気量の推定値、及び気筒吸入空気量の推定値として、各時点の直前の1つの演算サイクルの期間における、吸気マニホールド内空気量の平均値、吸気マニホールド内圧力の平均値、スロットル通過空気量、及び気筒吸入空気量を算出する請求項1から8のいずれか一項に記載の内燃機関の制御装置。
- 前記吸気量予測部は、前記1つの演算サイクル先のスロットル通過空気量の推定値を算出する際に用いる前記1つの演算サイクル先の実開度の推定値として、前記現在の実開度と前記1つの演算サイクル先の実開度の推定値との平均値を用い、
前記2つの演算サイクル先のスロットル通過空気量の推定値を算出する際に用いる前記2つの演算サイクル先の実開度の推定値として、前記1つの演算サイクル先の実開度の推定値と前記2つの演算サイクル先の実開度の推定値との平均値を用いる請求項7に記載の内燃機関の制御装置。 - 前記吸気量予測部は、前記1つの演算サイクル先のスロットル通過空気量の推定値を算出する際に用いる前記1つの演算サイクル先の実開度の推定値として、前記現在の実開度と前記1つの演算サイクル先の実開度の推定値との平均値を用いる請求項8に記載の内燃機関の制御装置。
- 前記吸気量予測部は、前記気筒空気量演算処理において、回転速度及び吸気マニホールド内圧力に基づいて体積効率を算出し、吸気マニホールド内圧力に前記体積効率を乗算した値に基づいて、気筒吸入空気量を算出する請求項1から11のいずれか一項に記載の内燃機関の制御装置。
- 前記吸気量予測部は、前記スロットル空気量演算処理において、実開度に基づいてスロットルの有効開口面積を算出し、前記有効開口面積及び吸気マニホールド内圧力に基づいて、スロットル通過空気量を算出する請求項1から12のいずれか一項に記載の内燃機関の制御装置。
- 前記目標開度遅れ処理部は、インジェクタの駆動タイミングの変化に応じて、前記遅延数を変化させる請求項1から13のいずれか一項に記載の内燃機関の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020122582A JP6910512B1 (ja) | 2020-07-17 | 2020-07-17 | 内燃機関の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020122582A JP6910512B1 (ja) | 2020-07-17 | 2020-07-17 | 内燃機関の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6910512B1 true JP6910512B1 (ja) | 2021-07-28 |
| JP2022019041A JP2022019041A (ja) | 2022-01-27 |
Family
ID=76969096
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020122582A Active JP6910512B1 (ja) | 2020-07-17 | 2020-07-17 | 内燃機関の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6910512B1 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4123340B2 (ja) * | 2002-02-27 | 2008-07-23 | 三菱自動車工業株式会社 | エンジンの吸気量算出装置 |
| JP4185079B2 (ja) * | 2005-08-10 | 2008-11-19 | 三菱電機株式会社 | 内燃機関用制御装置 |
| JP5594233B2 (ja) * | 2011-06-07 | 2014-09-24 | 三菱自動車工業株式会社 | エンジンの制御装置 |
-
2020
- 2020-07-17 JP JP2020122582A patent/JP6910512B1/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022019041A (ja) | 2022-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6407396B1 (ja) | 内燃機関の制御装置及び制御方法 | |
| JP6190936B1 (ja) | 内燃機関の制御装置及びその制御方法 | |
| US7418857B2 (en) | Air quantity estimation apparatus for internal combustion engine | |
| CN1934351B (zh) | 用于内燃机的燃料喷射设备和燃料喷射控制方法 | |
| US11555462B2 (en) | Controller and control method for internal combustion engine | |
| CN114763773B (zh) | 内燃机的控制装置及控制方法 | |
| US20150300916A1 (en) | Estimation apparatus and method for cylinder intake air amount of internal combustion engine | |
| JP7030884B2 (ja) | 内燃機関の制御装置 | |
| JP6910512B1 (ja) | 内燃機関の制御装置 | |
| JP2009013792A (ja) | 内燃機関の運転制御装置 | |
| JP2018150861A (ja) | 内燃機関の制御装置 | |
| US7349796B2 (en) | Apparatus and method for judging a piston position in an engine | |
| JP7146131B1 (ja) | 内燃機関の制御装置 | |
| JP2007240310A (ja) | エンジンのシリンダ吸入ガス量計測装置 | |
| JP6765491B1 (ja) | 内燃機関の制御装置 | |
| JP2023158714A (ja) | 内燃機関の制御装置 | |
| JP7250067B2 (ja) | 内燃機関の制御装置 | |
| JP7621562B2 (ja) | 内燃機関のトルク推定装置 | |
| JP6686427B2 (ja) | エンジン制御装置 | |
| JP2006207538A (ja) | 内燃機関の点火時期制御装置 | |
| JP7191187B1 (ja) | 内燃機関の制御装置 | |
| JP7191188B1 (ja) | 内燃機関の制御装置 | |
| JP2010168953A (ja) | 可変吸気バルブのリフト量に応じた燃料を噴射する内燃機関 | |
| JP2008274796A (ja) | 可変圧縮比エンジンのトルク推定装置 | |
| JP5279759B2 (ja) | 内燃機関の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200717 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210608 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210706 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6910512 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |