JP6853733B2 - 送水システムおよび送水方法 - Google Patents
送水システムおよび送水方法 Download PDFInfo
- Publication number
- JP6853733B2 JP6853733B2 JP2017105167A JP2017105167A JP6853733B2 JP 6853733 B2 JP6853733 B2 JP 6853733B2 JP 2017105167 A JP2017105167 A JP 2017105167A JP 2017105167 A JP2017105167 A JP 2017105167A JP 6853733 B2 JP6853733 B2 JP 6853733B2
- Authority
- JP
- Japan
- Prior art keywords
- water
- pump
- total amount
- final
- tank
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Barrages (AREA)
- Feedback Control In General (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Description
本発明はこのような問題点に鑑みてなされたものであり、本発明の課題は、電力を削減可能な送水システムおよび送水方法を提供することである。
図1は、第1の実施形態に係る送水システム100の概略構成図である。この送水システム100は揚水ポンプ場に設けられる。送水システム100は、複数(本実施形態では3台)の揚水ポンプ1と、吸水槽水位計2と、吐水槽水位計3と、流量計4と、制御部5とを備えている。
吐水槽水位計3は吐水槽12に設けられ、吐水槽12の水位を計測する。計測結果は制御部5に通知される。
流量計4は吐水槽12の排水側に設けられ、吐水槽12から排出される水の流量を計測する。計測結果は制御部5に通知される。
A[m3]=ΣQ0[m3/s]×ti[s]
なお、ti(本実施形態ではi=1〜3)はi番目の揚水ポンプ1の運転時間である。
C[m3]=(h0[m]−h1[m])×S[m2]
B[m3]=A[m3]−C[m3]
T[s]=(D[m3]−E[m3])/f[s]
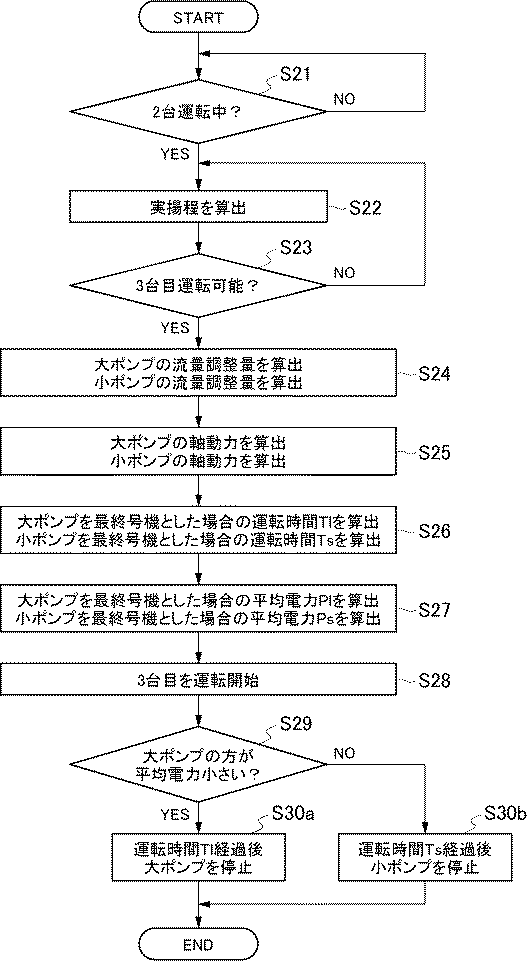
上述した第1の実施形態では、全ての揚水ポンプ1の能力が等しいことを前提としていた。これに対し、次に説明する第2の実施形態は、能力が異なる揚水ポンプ1が含まれることとする。以下では説明を簡略化するため、3台の揚水ポンプ1が、能力(瞬時流量)が大きい大ポンプと、瞬時流量が小さい小ポンプとを含んでいるものとし、第1の実施形態との相違点を中心に説明する。
上述した第1および第2の実施形態は、揚水ポンプ場に設けられる送水システム100を念頭に置いていた。次に説明する送水システム101は排水ポンプ場に設けられるものである。以下、第1の実施形態との相違点を中心に説明する。
L[m3]=ΣQ1[m3/s]×ti[s]
なお、ti(本実施形態ではi=1〜3)はi番目の排水ポンプ1’の運転時間である。
M[m3]=(h3[m]−h4[m])×S1[m2]
N[m3]=L[m3]+C[m3]
1’ 排水ポンプ
2 吸水槽水位計
3 吐水槽水位計
4 流量計
5 制御部
11 吸水槽
12 吐水槽
100,101 送水システム
Claims (9)
- 吸水槽内の水を吐水槽に送水する複数のポンプと、
前記吸水槽の水位を計測する吸水槽水位計と、
前記吐水槽の水位を計測する吐水槽水位計と、
前記複数のポンプのそれぞれの運転・停止を制御する制御部と、を備え、
前記制御部は、
前記吸水槽の水位および前記吐水槽の水位に基づいて、所定時間間隔において送水すべき水の総量を算出し、
算出された前記所定時間間隔において送水すべき水の総量に基づいて、最終号機となるポンプが前記所定時間間隔において運転すべき時間を算出し、
前記最終号機となるポンプが運転可能となると前記最終号機となるポンプを運転開始し、
その後、前記最終号機となるポンプが運転すべき時間が経過すると、前記最終号機となるポンプを停止する、送水システム。 - 吸水槽内の水を吐水槽に送水する複数のポンプと、
前記吸水槽の水位を計測する吸水槽水位計と、
前記吐水槽の水位を計測する吐水槽水位計と、
前記複数のポンプのそれぞれの運転・停止を制御する制御部と、を備え、
前記制御部は、
前記吸水槽の水位および前記吐水槽の水位に基づいて、所定時間間隔において送水すべき水の総量を算出し、
算出された前記所定時間間隔において送水すべき水の総量に基づいて、最終号機となるポンプが前記所定時間間隔において運転すべき時間を算出し、
前記最終号機となるポンプが運転可能となると前記最終号機となるポンプを運転開始し、
その後、前記最終号機となるポンプが運転すべき時間が経過すると、前記最終号機となるポンプを停止することなく、前記最終号機となるポンプとは異なるポンプを停止する、送水システム。 - 前記制御部は、前記吸水槽の水位および前記吐水槽の水位に基づく実揚程がキャビテーションが発生する領域でない場合に、最終号機となるポンプが運転可能であると判断する、請求項1または2に記載の送水システム。
- 前記制御部は、前記最終号機となるポンプにおける吐出弁の開度、羽根車の回転数および/またはポンプ翼の角度を調整することにより、前記最終号機となるポンプを停止する、請求項1に記載の送水システム。
- 前記制御部は、前記最終号機とは異なるポンプにおける吐出弁の開度、羽根車の回転数および/またはポンプ翼の角度を調整することにより、前記最終号機とは異なるポンプを停止する、請求項2に記載の送水システム。
- 当該送水システムは揚水ポンプ場に設けられ、
前記ポンプは揚水ポンプであり、
前記制御部は、
前記吸水槽の水位および前記吐水槽の水位に基づいて、前記所定時間間隔に先行する時間間隔において前記吐水槽から流出した水の総量と、前記吐水槽に貯留された水の総量と、を算出し、
算出された前記吐水槽から流出した水の総量、および、前記吐水槽に貯留された水の総量に基づいて、前記所定時間間隔において送水すべき水の総量を算出する、請求項1乃至5のいずれかに記載の送水システム。 - 当該送水システムは排水ポンプ場に設けられ、
前記ポンプは排水ポンプであり、
前記制御部は、
前記吸水槽の水位および前記吐水槽の水位に基づいて、前記所定時間間隔に先行する時間間隔において前記複数のポンプが排水した水の総量と、前記吸水槽に貯留された水の総量と、を算出し、
算出された前記吐水槽から流出した水の総量、および、前記吐水槽に貯留された水の総量に基づいて、前記所定時間間隔において送水すべき水の総量を算出する、請求項1乃至5のいずれかに記載の送水システム。 - 複数のポンプを用いて吸水槽内の水を吐水槽に送水する送水方法であって、制御部が、
吸水槽の水位および吐水槽の水位に基づいて、所定時間間隔において送水すべき水の総量を算出し、
算出された前記所定時間間隔において送水すべき水の総量に基づいて、最終号機となるポンプが前記所定時間間隔において運転すべき時間を算出し、
前記最終号機となるポンプが運転可能となると前記最終号機となるポンプを運転開始し、
その後、前記最終号機となるポンプが運転すべき時間が経過すると、前記最終号機となるポンプを停止する、送水方法。 - 複数のポンプを用いて吸水槽内の水を吐水槽に送水する送水方法であって、制御部が、
吸水槽の水位および吐水槽の水位に基づいて、所定時間間隔において送水すべき水の総量を算出し、
算出された前記所定時間間隔において送水すべき水の総量に基づいて、最終号機となるポンプが前記所定時間間隔において運転すべき時間を算出し、
前記最終号機となるポンプが運転可能となると前記最終号機となるポンプを運転開始し、
その後、前記最終号機となるポンプが運転すべき時間が経過すると、前記最終号機となるポンプを停止することなく、前記最終号機となるポンプとは異なるポンプを停止する、送水方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105167A JP6853733B2 (ja) | 2017-05-29 | 2017-05-29 | 送水システムおよび送水方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017105167A JP6853733B2 (ja) | 2017-05-29 | 2017-05-29 | 送水システムおよび送水方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018200584A JP2018200584A (ja) | 2018-12-20 |
| JP6853733B2 true JP6853733B2 (ja) | 2021-03-31 |
Family
ID=64668120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017105167A Active JP6853733B2 (ja) | 2017-05-29 | 2017-05-29 | 送水システムおよび送水方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6853733B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240018852A (ko) * | 2022-08-03 | 2024-02-14 | 충북대학교 산학협력단 | 유수 펌프장 운영 시스템 및 그 제어 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2555091B2 (ja) * | 1987-09-03 | 1996-11-20 | 富士電機株式会社 | 多段直列ポンプ場群の制御方法 |
| US7874809B2 (en) * | 2003-10-07 | 2011-01-25 | Ebara Corporation | Water-lifting pump apparatus and method for controlling operation thereof |
| JP4646026B2 (ja) * | 2005-02-24 | 2011-03-09 | 株式会社鶴見製作所 | 揚送ポンプ装置の運転方法 |
| JP4435064B2 (ja) * | 2005-09-21 | 2010-03-17 | 株式会社荏原製作所 | 合流式下水道におけるポンプ場システムおよび下水処理方法 |
| JP2008063982A (ja) * | 2006-09-06 | 2008-03-21 | Yaskawa Electric Corp | 送水制御方法とその装置およびこれを用いた送水制御システム |
| JP5416729B2 (ja) * | 2011-03-22 | 2014-02-12 | 株式会社日立製作所 | 水道中央監視制御装置、水道監視制御システムおよび水道監視制御プログラム |
-
2017
- 2017-05-29 JP JP2017105167A patent/JP6853733B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018200584A (ja) | 2018-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11313343B2 (en) | Hydroelectric power generation system | |
| RU2553630C2 (ru) | Способ для оптимизированной по мощности эксплуатации насоса, приводимого в действие электродвигателем, при малых объемных расходах | |
| CN104654522B (zh) | 变频冷冻水泵的控制方法和系统 | |
| KR102251296B1 (ko) | 유체 순환 시스템 내의 펌프장을 제어하는 방법과 상기 제어 방법을 사용한 순환 시스템 및 펌프장 | |
| CN103266646A (zh) | 一种变频变压供水的实现方法及其实现装置 | |
| JP6853733B2 (ja) | 送水システムおよび送水方法 | |
| CN109716643B (zh) | 水力发电系统 | |
| US11920553B2 (en) | Hydroelectric power generation system | |
| JP2016217267A (ja) | ポンプユニット及びポンプユニットの制御方法 | |
| JP2016125477A (ja) | 給水装置及び給水装置の制御方法 | |
| JP2018119409A (ja) | 水力発電システム | |
| EP2990652A1 (en) | Pump device | |
| JP6647881B2 (ja) | ポンプ運転パターン制御方法およびポンプ装置 | |
| US10844862B2 (en) | Self-sensing parallel control of pumps | |
| RU2015119187A (ru) | Способ управления насосами | |
| JP6534546B2 (ja) | ポンプ運転台数制御方法およびポンプ装置 | |
| JPH08159078A (ja) | 少水量停止機能付回転数制御給水システム | |
| US20160252086A1 (en) | Method for operating a pump unit, pump unit and use thereof | |
| JP6665232B2 (ja) | 給水装置 | |
| JP4938304B2 (ja) | ポンプの制御方法及び給水装置 | |
| KR101605111B1 (ko) | 전력 절감을 위한 부스터 펌프 구동 장치 및 방법 | |
| JPWO2014054554A1 (ja) | 給水装置 | |
| GB2535856A (en) | Control system and control method of circulating water pump | |
| CN114737640B (zh) | 一种智能静音防淹供水设备的高效运行和预警方法及装置 | |
| JP2002005075A (ja) | ポンプ制御方式 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200302 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210209 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210302 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6853733 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |