JP6707378B2 - 自己位置推定装置および自己位置推定方法 - Google Patents
自己位置推定装置および自己位置推定方法 Download PDFInfo
- Publication number
- JP6707378B2 JP6707378B2 JP2016062189A JP2016062189A JP6707378B2 JP 6707378 B2 JP6707378 B2 JP 6707378B2 JP 2016062189 A JP2016062189 A JP 2016062189A JP 2016062189 A JP2016062189 A JP 2016062189A JP 6707378 B2 JP6707378 B2 JP 6707378B2
- Authority
- JP
- Japan
- Prior art keywords
- self
- algorithm
- light
- positions
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/16—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/165—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments
- G01C21/1656—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation combined with non-inertial navigation instruments with passive imaging devices, e.g. cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/78—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using electromagnetic waves other than radio waves
- G01S3/781—Details
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Automation & Control Theory (AREA)
- Navigation (AREA)
Description
(4)上記目的を達成するため、本発明の一態様に係る自己位置推定方法は、受光部が、送信装置からの発光信号を画素によって受光する受光手順と、位置算出部が、前記発光信号のうち自己位置算出に利用できる数が3つの場合に、3つの前記送信装置の位置と、自己位置推定装置の姿勢とが既知のとき第1アルゴリズムを選択し、3つの前記送信装置の位置と、前記自己位置推定装置の姿勢に基づいて自己位置を推定し、3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれが既知のとき第2アルゴリズムを選択し、3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれに基づいて前記自己位置を推定し、3つの前記送信装置の位置のみが既知のとき第3アルゴリズムを選択し、3つの前記送信装置の位置に基づいて前記自己位置を算出する手順と、を含む。
図1は、本実施形態に係る通信システム1の構成を表すシステム構成図である。図1に示すように、通信システム1は、自己位置推定装置10および第1の送信装置20−1、第2の送信装置20−2、第3の送信装置20−3、・・・を備えている。以下の例では、車両が自己位置推定装置10を搭載しているとして説明する。また、以下の説明では、第1の送信装置20−1、第2の送信装置20−2、第3の送信装置20−3、・・・のうちの1つを特定しない場合、単に送信装置20という。
レンズ201は、自己位置推定装置10が発光した送信信号である位相変調光および環境光を含む光束を通過し、通過した光束を受光部202に結像する。なお、送信装置20は、レンズ201と受光部202との間に、光学的なフィルタを備えるようにしてもよい。
受光部202は、複数の画素が二次元に配列された構造を有する。受光部202は、画素によって受光した光に応じた電荷を発生させて蓄積し、制御部207の制御に応じて所定のタイミングで蓄積した電荷を受信信号として復調器205へ出力する。
発振器204は、GNSS203から入力された基準信号に応じて、生成した同期信号を補正し、補正した同期信号を変調器209に出力する。または、発振器204は、GNSS203が出力した基準信号を用いて同期信号を生成し、生成した同期信号を変調器209に出力する。なお、発振器204は、GNSS203の代わりに他の送信装置20から同期信号を有線や無線にて受け取って発振するようにしてもよい。
復号器206は、復調器205が復調した受信信号を、符号器208が用いる符号化に応じて復号し、復号した受信信号を制御部207に出力する。
制御部207は、受光部202が有する画素を制御する。また、制御部207は、投光器210を制御する。制御部207は、記憶部211が記憶する情報を用いて送信情報を生成し、生成した送信情報を符号器208に出力する。制御部207は、復号器206が出力する自己位置推定装置10からの送信情報を受信し、受信した送信情報から、ID、タイムコード、同期クラス、および搬送波の位相情報を抽出する。制御部207は、復号器206が出力する自己位置推定装置10のIDと遅れ時間を取得する。制御部207は、自己位置推定装置10のIDとタイムコードと同期クラスと遅れ時間を符号器208へ出力する。
変調器209は、符号器208が出力するビット列を、例えばDBPSK方式に従って、発振器204が出力する同期信号を用いて変調して搬送波を生成する。変調器209は、生成した搬送波を投光器210に出力する。なお、変調器209で行う変調方式は、例えば、2π/3−DBPSK(Differential Binary Phase Shift Keying)等の方式である。なお、変調器209が行う変調方式は、2π/3−DBPSK変調方式に限られない。
レンズ101は、送信装置20が発光した送信信号である位相変調光および環境光を含む光束を通過し、通過した光束を受光部102に結像する。なお、自己位置推定装置10は、レンズ101と受光部102との間に、光学的なフィルタを備えるようにしてもよい。
復号器106は、復調器105が復調した受信信号を、送信装置20の符号器208が用いる符号化に応じて復号し、復号した受信信号を制御部107と第1座標探索部113に出力する。
変調器109は、符号器108が出力するビット列を、例えばDBPSK方式に従って、発振器104が出力する同期信号を用いて変調して搬送波を生成する。変調器109は、生成した搬送波を投光器110に出力する。
レートセンサー132は、ジャイロセンサーであり、自己位置推定装置10の角速度を検出し、検出した角速度を示す情報を姿勢推定部115へ出力する。
距離計133は、自己位置推定装置10を搭載する車両の移動距離を計測し、計測した移動距離を示す情報を相対変位推定部116に出力する。
次に、通信システム1の処理手順の一例を説明する。
図2は、本実施形態に係る通信システム1の処理のフローチャートである。
(ステップS2)制御部107は、復号器106が出力する信号を取得し、取得した信号を解読する。なお、信号の解読は、復号器106が行うようにしてもよい。
(ステップS5)位置算出部121は、ステップS4で選択したアルゴリズムを用いて、現在位置の座標の計算を行う。
次に、位置算出部121が図2のステップS4で行うアルゴリズムの選択手順の一例を説明する。
図3および図4は本実施形態に係るアルゴリズムの選択のフローチャートである。
(ステップS106)位置算出部121は、現在位置の座標の計算に用いるアルゴリズムに第3アルゴリズムを適用することを決定する。なお、第3アルゴリズムについては、後述する。
(ステップS121)位置算出部121は、現在位位置の計算に座標が既知の光源を1つ用いるか否かを判別する。なお、位置算出部121は、例えば、ステップS1(図2)で取得できた光源の画像数、取得できた光源の信号出力レベル、および取得できた信号の輝度レベルのうち少なくとも1つを用いて、現在位位置の計算に座標が既知の光源を1つ用いるか否かを判別する。位置算出部121は、現在位位置の計算に座標が既知の光源を1つ用いると判別した場合(ステップS121;YES)、ステップS122に処理を進め、現在位位置の計算に座標が既知の光源を1つ用いないと判別した場合(ステップS121;NO)、処理を終了する。
以上で、位置算出部121は、アルゴリズムの選択処理を終了する。
または、位置算出部121は、複数のアルゴリズムを選択し、得られた解に対して、例えばk−平均アルゴリズムを用いてクラスタリングを行う。位置算出部121は、クラスタリングを行った結果に基づいて、クラスタから外れるデータをノイズが多く、妥当では無いとして除外するようにしてもよい。
また、本実施形態によれば、4つ以上の送信信号を自己位置算出に利用できる場合であっても、4つ以上の送信信号から3つ以下の送信信号を選択して、選択した送信信号に基づくアルゴリズムを選択することができる。これにより、本実施形態によれば、4つ以上の送信信号が受信できた場合であっても、適度な精度にて自己位置を推定することができる。
次に、送信装置20と自己位置推定装置10を搭載する車両12との間の距離の算出方法について説明する。
図5は、本実施形態に係る送信装置20と自己位置推定装置10を搭載する車両12との間の相互通信を示す図である。図5において、縦軸は信号がH(ハイ)レベルであるかL(ロー)レベルであるかを表し、横軸は時刻を表す。また、図5に示す例は、車両12の進行方向に対して車両12の前方に、送信装置20が設置されているとする。
波形g1は、送信装置20が発光した送信信号を表す。波形g2は、送信装置20が発光した送信信号を、車両12の自己位置推定装置10が受信した受信信号を表す。波形g3は、車両12の自己位置推定装置10が発光した送信信号を表す。波形g4は、車両12の自己位置推定装置10が発光した送信信号を、送信装置20が受信した受信信号を表す。
また、tは、真の遅れ時間を表す。bは、車両12の自己位置推定装置10の基準時刻を用いて測定した遅れ時間を表す。dは、同期誤差を表す。なお、本実施形態では、同期誤差を位相誤差ともいう。aは、送信装置20の基準時刻を用いて測定した遅れ時間を表す。なお、本実施形態では、aとbを見かけの遅れ時間ともいう。
図5に示すように、真の遅れ時間tは、次式(1)、次式(2)のように表される。
ここで、光源である送信装置20からの光線の入射角度の算出方法について説明する。
図6は、本実施形態に係る第1アルゴリズムの説明に用いる図である。
本実施形態では、例えば、予め自己位置推定装置10が、光源の位置と入射光線の角度が既知の光源からの送信信号を、受光部102を用いて露光することで撮像する。ここで、角度は、極座標におけるパン角とチルト角である。制御部107は、撮像した結果、光源が撮像された全画素中における座標に、撮像時の角度を対応付けて記憶部111に記憶する。なお、本実施形態では、このような処理を、カメラキャリブレーションともいう。なお、カメラキャリブレーションは、例えば、特許第3906123号公報に記載の手法や、特許第4077755号公報に記載の手法を用いる。
次に、第1アルゴリズムについて、図6を用いて説明する。第1アルゴリズムでは、後方交会法を用いる。
第1アルゴリズムにおいては、3つの光源である第1の送信装置20−1〜第3の送信装置20−3それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。
ここで、ABPを頂点とする三角形ΔABPの外接円の方程式は、X1,Y1,X2,Y2,θ12を用いて、次式(6)のように表される。なお、円の半径ROとする。

また、BCPを頂点とする三角形ΔBCPの外接円の方程式は、X1,Y1,X2,Y2,θ23を用いて、次式(7)のように表される。なお、円の半径RQとする。
位置算出部121は、三角形ΔABPの外接円と三角形ΔBCPの外接円との交点を求め、Bでない交点をPに決定することで、位置P(XP,YP)の座標を求める。
次に、第2アルゴリズムについて説明する。図7は、本実施形態に係る第2アルゴリズムの説明に用いる図である。
第2アルゴリズムにおいては、第1の送信装置20−1〜第3の送信装置20−3それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。また、第1の送信装置20−1〜第3の送信装置20−3それぞれの位置A,B,Cと、位置Aと位置Pとの距離L1と、位置Bと位置Pとの距離L2と、位置Cと位置Pとの距離L3が既知である。なお、制御部107は、距離L1〜L3それぞれを、前述したように光通信を行うことで計測する。
次に、第3アルゴリズムについて説明する。図8は、本実施形態に係る第3アルゴリズムの説明に用いる図である。
第3アルゴリズムにおいては、第1の送信装置20−1〜第3の送信装置20−3それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。
次に、第4アルゴリズムについて説明する。図9は、本実施形態に係る第4アルゴリズムの説明に用いる図である。
第4アルゴリズムにおいては、第1の送信装置20−1〜第2の送信装置20−2それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。また、位置Pの高度Z0と、位置Aと位置PとのZ軸方向の角度A1と、位置Bと位置PとのZ軸方向の角度A2が既知である。以下、本実施形態では、角度A1、角度A2を仰俯角ともいう。なお、位置算出部121は、車両12の姿勢と受光部102によって撮像した画像から得られる光源の方向(パン角、チルト角)から、仰俯角A1〜A2それぞれを算出する。
次に、第5アルゴリズムについて説明する。図10は、本実施形態に係る第5アルゴリズムの説明に用いる図である。
第5アルゴリズムにおいては、第1の送信装置20−1〜第2の送信装置20−2それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。また、位置Aと位置Pとの距離L1と、仰俯角A1と、仰俯角A2が既知である。なお、制御部107は、距離L1を光通信によって計測する。また、位置算出部121は、仰俯角A1〜A2それぞれを前述したように算出する。
ここで、光源である送信装置20と、自己位置推定装置10を搭載する車両12との方位角の算出方法について説明する。
図11は、本実施形態に係る第6アルゴリズムの説明に用いる図である。
自己位置推定装置10を搭載する車両12のおおよその位置P’(X’p,Y’p,Z’p)が既知であり,位置P’から速度(Vx,Vy)で移動することで時間Δtが経過し現在の位置が不明な状況であると仮定する。また、図11において、第3の送信装置20−3が、第1の送信装置20−1〜第2の送信装置20−2より遠方に位置しているとする。
この場合、位置算出部121は、太陽、月、星などの天体が見える(撮像される)べき方位を、自己の緯度と経度と時刻から算出することができる。光源が所定の距離より遠い場合、位置算出部121は、光源の方位d3を次式(11)から算出する。
次に、第6アルゴリズムについて、図11を用いて説明する。
第6アルゴリズムにおいては、第1の送信装置20−1〜第2の送信装置20−2それぞれの位置が既知である。また、自己位置推定装置10を搭載する車両12の位置Pは未知である。また、位置Aと位置Pとの方位角d1と、位置Bと位置Pとの方位角d2が既知である。
位置算出部121は、法線ベクトルの座標(x,y,z)を自己位置推定装置10の傾斜している角度のピッチとロール(p、r)を用いて、次式(12)のように変換する。
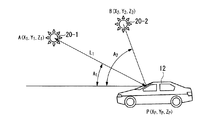
次に、第7アルゴリズムについて説明する。図12は、本実施形態に係る第7アルゴリズムの説明に用いる図である。
第7アルゴリズムにおいては、第1の送信装置20−1の位置が既知である。また、自己位置推定装置10を搭載する車両12の位置は未知であるが車線14内である。また、仰俯角A1が既知である。なお、位置算出部121は、仰俯角A1を前述したように算出する。なお、ここで、車両12が走行している道路における車線(白線)が既知であるとする。なお、第2座標探索部120は、車線の座標を前述したように求める。
次に、第8アルゴリズムについて説明する。図13は、本実施形態に係る第8アルゴリズムの説明に用いる図である。
第8アルゴリズムにおいては、第1の送信装置20−1の位置が既知である。また、自己位置推定装置10を搭載する車両12の位置は未知であるが車線14内である。また、位置Aと位置Pとの距離L1が既知である。なお、制御部107は、距離L1を光通信によって計測する。
次に、第9アルゴリズムについて説明する。図15は、本実施形態に係る第9アルゴリズムの説明に用いる図である。
第9アルゴリズムにおいては、第1の送信装置20−1の位置が既知である。また、自己位置推定装置10を搭載する車両12の位置は未知である。また、位置Pの高度Z0、位置Aと位置Pとの方位角d1が既知である。なお、位置算出部121は、方位角d1を前述したように算出する。
次に、第10アルゴリズムについて説明する。図16は、本実施形態に係る第10アルゴリズムの説明に用いる図である。
第10アルゴリズムにおいては、第1の送信装置20−1の位置と、自己位置推定装置10を搭載する車両12の位置が未知である。また、位置Aと位置Pとの方位角d1と、位置Aと位置PとのZ軸方向の角度A1が既知である。なお、位置算出部121は、角度A1を前述したように算出し、方位角d1を前述したように算出する。
また、本実施形態によれば、自己位置算出に利用できる送信信号の数が2つの場合、2つの送信装置20の位置(位置A(X1,Y1,Z0)、位置B(X2,Y2,Z2))と、自己位置推定装置10の姿勢(仰俯角A1、仰俯角A2)と、2つの送信装置20それぞれと自己位置推定装置10との距離(L1、L2)それぞれに基づいて、高精度に自己位置を推定することができる。
また、本実施形態によれば、自己位置算出に利用できる送信信号の数が2つの場合、2つの送信装置20の位置(位置A(X1,Y1,Z0)、位置B(X2,Y2,Z2))と、自己位置推定装置10の姿勢と、2つの送信装置20それぞれと自己位置推定装置10との間の方位角(d1、d2)それぞれに基づいて、高精度に自己位置を推定することができる。
また、本実施形態によれば、自己位置算出に利用できる送信信号の数が1つの場合、1つの送信装置20の位置(位置A(X1,Y1,Z0)と、自己位置推定装置10の姿勢と、自己位置推定装置10を搭載する車両12が走行している道路の位置情報(拘束条件)と、1つの送信装置20と自己位置推定装置10との距離(L1)に基づいて、高精度に自己位置を推定することができる。
また、本実施形態によれば、自己位置算出に利用できる送信信号の数が1つの場合、1つの送信装置20の位置(位置A(X1,Y1,Z0)と、自己位置推定装置10の姿勢(A1)と、自己位置推定装置10の方位角(d1)と、1つの送信装置20と自己位置推定装置10との距離(L1)に基づいて、高精度に自己位置を推定することができる。
また、自己位置推定装置10を搭載する車両は、鞍乗り型車両(自動二輪車)、自動三輪車、四輪車等であってもよい。
Claims (4)
- 送信装置からの発光信号を画素によって受光する受光部と、
前記受光部が取得した前記発光信号のうち自己位置の算出に用いる数に応じて、前記自己位置を推定する複数のアルゴリズムの中から少なくとも1つを選択し、選択した前記アルゴリズムを用いて前記自己位置を算出する位置算出部と、
を備え、
前記位置算出部は、
前記受光部が4つ以上の前記発光信号を取得した場合、4つ以上の前記発光信号の中から3つ以下の前記発光信号を選択し、選択した前記発光信号を用いて前記複数のアルゴリズムの中から2つ以上の前記アルゴリズムを選択し、予め定められている優先度に基づいて前記2つ以上の前記アルゴリズムの中から少なくとも1つの前記アルゴリズムを選択、または予め定められている優先度に基づいて前記2つ以上の前記アルゴリズムによって算出される前記自己位置の中から少なくとも1つを選択する処理、算出した前記自己位置の平均値を算出する処理、算出した前記自己位置に対して予め定められている重み付けした後に平均を算出する処理、算出した前記自己位置に対してクラスタリングを行い、クラスタに基づいて前記自己位置を算出する処理のうち少なくとも1つの処理によって前記自己位置を算出する、
自己位置推定装置。 - 送信装置からの発光信号を画素によって受光する受光部と、
前記受光部が取得した前記発光信号のうち自己位置の算出に用いる数に応じて、前記自己位置を推定する複数のアルゴリズムの中から少なくとも1つを選択し、選択した前記アルゴリズムを用いて前記自己位置を算出する位置算出部と、
を備え、
前記位置算出部は、
前記発光信号のうち自己位置算出に利用できる数が3つの場合に、
3つの前記送信装置の位置と、自己位置推定装置の姿勢とが既知のとき第1アルゴリズムを選択し、3つの前記送信装置の位置と、前記自己位置推定装置の姿勢に基づいて前記自己位置を推定し、
3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれが既知のとき第2アルゴリズムを選択し、3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれに基づいて前記自己位置を推定し、
3つの前記送信装置の位置のみが既知のとき第3アルゴリズムを選択し、3つの前記送信装置の位置に基づいて前記自己位置を推定する、
自己位置推定装置。 - 受光部が、送信装置からの発光信号を画素によって受光する受光手順と、
位置算出部が、前記受光部が4つ以上の前記発光信号を取得した場合、4つ以上の前記発光信号の中から3つ以下の前記発光信号を選択し、選択した前記発光信号を用いて複数のアルゴリズムの中から2つ以上の前記アルゴリズムを選択し、予め定められている優先度に基づいて前記2つ以上の前記アルゴリズムの中から少なくとも1つの前記アルゴリズムを選択、または予め定められている優先度に基づいて前記2つ以上の前記アルゴリズムによって算出される自己位置の中から少なくとも1つを選択する処理、算出した前記自己位置の平均値を算出する処理、算出した前記自己位置に対して予め定められている重み付けした後に平均を算出する処理、算出した前記自己位置に対してクラスタリングを行い、クラスタに基づいて前記自己位置を算出する処理のうち少なくとも1つの処理によって前記自己位置を算出する手順と、
を含む自己位置推定方法。 - 受光部が、送信装置からの発光信号を画素によって受光する受光手順と、
位置算出部が、前記発光信号のうち自己位置算出に利用できる数が3つの場合に、3つの前記送信装置の位置と、自己位置推定装置の姿勢とが既知のとき第1アルゴリズムを選択し、3つの前記送信装置の位置と、前記自己位置推定装置の姿勢に基づいて自己位置を推定し、3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれが既知のとき第2アルゴリズムを選択し、3つの前記送信装置の位置と、3つの前記送信装置それぞれと前記自己位置推定装置との距離それぞれに基づいて前記自己位置を推定し、3つの前記送信装置の位置のみが既知のとき第3アルゴリズムを選択し、3つの前記送信装置の位置に基づいて前記自己位置を算出する手順と、
を含む自己位置推定方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016062189A JP6707378B2 (ja) | 2016-03-25 | 2016-03-25 | 自己位置推定装置および自己位置推定方法 |
| US15/434,367 US10895627B2 (en) | 2016-03-25 | 2017-02-16 | Self-position estimation apparatus and self-position estimation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016062189A JP6707378B2 (ja) | 2016-03-25 | 2016-03-25 | 自己位置推定装置および自己位置推定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017173247A JP2017173247A (ja) | 2017-09-28 |
| JP6707378B2 true JP6707378B2 (ja) | 2020-06-10 |
Family
ID=59898455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016062189A Active JP6707378B2 (ja) | 2016-03-25 | 2016-03-25 | 自己位置推定装置および自己位置推定方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10895627B2 (ja) |
| JP (1) | JP6707378B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6791645B2 (ja) * | 2016-03-29 | 2020-11-25 | 本田技研工業株式会社 | 光通信装置、光通信システム、および光通信方法 |
| CN109341701B (zh) * | 2018-12-06 | 2022-03-15 | 上海圭目机器人有限公司 | 基于激光跟踪全站仪的地面机器人航向角实时获取方法 |
| JP2022042630A (ja) | 2020-09-03 | 2022-03-15 | 本田技研工業株式会社 | 自己位置推定方法 |
| JP7472946B2 (ja) | 2022-09-22 | 2024-04-23 | カシオ計算機株式会社 | 位置取得装置、位置取得方法及びプログラム |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59744A (ja) | 1982-06-28 | 1984-01-05 | Hitachi Ltd | デ−タ処理装置 |
| JP2688960B2 (ja) * | 1988-12-12 | 1997-12-10 | 本田技研工業株式会社 | 自走車の操向位置検出装置 |
| EP1102085A3 (en) * | 1999-11-15 | 2004-03-10 | Kokusai Electric Co., Ltd. | Positioning system and calculating method in mobile communication system |
| JP3590744B2 (ja) * | 1999-11-15 | 2004-11-17 | 株式会社日立国際電気 | 移動体通信システムにおける測位システム及び位置算出方法 |
| JP3374175B2 (ja) * | 2000-01-27 | 2003-02-04 | 名古屋大学長 | 位置表示用データ送信機能付きデータ送信装置、(以下[発明の名称の続き]欄に記載) |
| US6424914B1 (en) * | 2000-12-26 | 2002-07-23 | American Gnc Corporation | Fully-coupled vehicle positioning method and system thereof |
| JP2006220465A (ja) * | 2005-02-09 | 2006-08-24 | Nippon Signal Co Ltd:The | 位置特定システム |
| US7496241B1 (en) * | 2005-09-08 | 2009-02-24 | Goodrich Corporation | Precision optical systems with performance characterization and uses thereof |
| TWI315843B (en) * | 2006-07-03 | 2009-10-11 | Egalax Empia Technology Inc | Position detecting apparatus |
| JP2008014776A (ja) * | 2006-07-05 | 2008-01-24 | Toshiba Tec Corp | 位置検出システムおよび位置検出装置 |
| US8180486B2 (en) * | 2006-10-02 | 2012-05-15 | Honda Motor Co., Ltd. | Mobile robot and controller for same |
| JP5145735B2 (ja) * | 2007-03-02 | 2013-02-20 | 株式会社豊田中央研究所 | 測位装置及び測位システム |
| US8050458B2 (en) * | 2007-06-18 | 2011-11-01 | Honda Elesys Co., Ltd. | Frontal view imaging and control device installed on movable object |
| JP2009036571A (ja) * | 2007-07-31 | 2009-02-19 | Toshiba Corp | 可視光通信システムを利用した位置測定システム、位置測定装置及び位置測定方法 |
| JP2009145055A (ja) * | 2007-12-11 | 2009-07-02 | Toyota Motor Corp | 自律移動体 |
| JP5036631B2 (ja) * | 2008-05-30 | 2012-09-26 | 日本電信電話株式会社 | 位置推定端末、位置推定方法、および位置推定プログラム |
| JP5114514B2 (ja) * | 2010-02-25 | 2013-01-09 | 株式会社日立製作所 | 位置推定装置 |
| US8411258B2 (en) * | 2010-12-22 | 2013-04-02 | Intel Corporation | Systems and methods for determining position using light sources |
| US8756001B2 (en) * | 2011-02-28 | 2014-06-17 | Trusted Positioning Inc. | Method and apparatus for improved navigation of a moving platform |
| JP2012207996A (ja) * | 2011-03-29 | 2012-10-25 | Panasonic Corp | ナビゲーション端末 |
| CN103210279B (zh) * | 2011-11-15 | 2016-05-25 | 松下电器(美国)知识产权公司 | 位置推测装置、位置推测方法以及集成电路 |
| US20150019159A1 (en) * | 2013-07-15 | 2015-01-15 | Honeywell International Inc. | System and method for magnetometer calibration and compensation |
| JP6432221B2 (ja) * | 2014-01-15 | 2018-12-05 | パナソニック株式会社 | レーダ装置 |
| MX349024B (es) * | 2014-02-24 | 2017-07-07 | Nissan Motor | Dispositivo de calculo de la ubicacion propia y metodo de calculo de la ubicacion propia. |
| EP3136047B1 (en) * | 2014-04-25 | 2019-01-30 | Nec Corporation | Position and attitude estimation device, image processing device, and position and attitude estimation method |
| EP3161506A4 (en) * | 2014-06-30 | 2017-06-28 | Microsoft Technology Licensing, LLC | Light based positioning |
| JP6550881B2 (ja) * | 2014-07-14 | 2019-07-31 | 株式会社リコー | 立体物検出装置、立体物検出方法、立体物検出プログラム、及び移動体機器制御システム |
| US9933252B2 (en) * | 2014-08-04 | 2018-04-03 | Nissan Motor Co., Ltd. | Self-position calculating apparatus and self-position calculating method |
| US9965689B2 (en) * | 2016-06-09 | 2018-05-08 | Qualcomm Incorporated | Geometric matching in visual navigation systems |
-
2016
- 2016-03-25 JP JP2016062189A patent/JP6707378B2/ja active Active
-
2017
- 2017-02-16 US US15/434,367 patent/US10895627B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017173247A (ja) | 2017-09-28 |
| US10895627B2 (en) | 2021-01-19 |
| US20170276766A1 (en) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10417469B2 (en) | Navigation using self-describing fiducials | |
| US7973819B2 (en) | Method and apparatus for determining the position of a moving object, by using visible light communication | |
| JP5116555B2 (ja) | 位置標定装置、位置標定システム、標定サーバ装置および位置標定方法 | |
| US20200370920A1 (en) | Method and system for map improvement using feedback from positioning based on radar and motion sensors | |
| EP3617749B1 (en) | Method and arrangement for sourcing of location information, generating and updating maps representing the location | |
| US11875519B2 (en) | Method and system for positioning using optical sensor and motion sensors | |
| EP2133662B1 (en) | Methods and system of navigation using terrain features | |
| CN108496057B (zh) | 基于照明源定位 | |
| CN101384919B (zh) | 定位系统、定位方法、以及汽车导航系统 | |
| JP5607759B2 (ja) | 軌道ベースのロケーション判断を使用した画像識別 | |
| JP5145735B2 (ja) | 測位装置及び測位システム | |
| JP6707378B2 (ja) | 自己位置推定装置および自己位置推定方法 | |
| US11796682B2 (en) | Methods for geospatial positioning and portable positioning devices thereof | |
| AU2017233539A1 (en) | Estimating locations of mobile devices in a wireless tracking system | |
| KR20160147016A (ko) | 디지털 지도에 대한 위치를 판별하기 위한 방법 및 시스템 | |
| US20130131981A1 (en) | Using structured light to update inertial navigation systems | |
| JP2024509880A (ja) | センサーデータを使用して改善された位置精度 | |
| JP5355443B2 (ja) | 位置補正システム | |
| JP2001142532A (ja) | 移動体の位置検出装置 | |
| US20100085467A1 (en) | Image pickup device capable of providing gps coordinates of subject to be shot and method for detecting gps coordinates thereof | |
| KR102700374B1 (ko) | 고밀집 실내 환경에 적합한 무인비행체 위치 결정 시스템 | |
| JP6701153B2 (ja) | 移動体の位置計測システム | |
| CN117320148A (zh) | 多源数据融合定位方法、系统、电子设备及存储介质 | |
| JP7345153B2 (ja) | 飛翔体の地理座標推定装置、地理座標推定システム、地理座標推定方法、及びコンピュータプログラム | |
| US10830906B2 (en) | Method of adaptive weighting adjustment positioning |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181005 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191223 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6707378 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |