JP6103980B2 - Passage detection system, passage detection method, passage detection device, program, and recording medium - Google Patents
Passage detection system, passage detection method, passage detection device, program, and recording medium Download PDFInfo
- Publication number
- JP6103980B2 JP6103980B2 JP2013033201A JP2013033201A JP6103980B2 JP 6103980 B2 JP6103980 B2 JP 6103980B2 JP 2013033201 A JP2013033201 A JP 2013033201A JP 2013033201 A JP2013033201 A JP 2013033201A JP 6103980 B2 JP6103980 B2 JP 6103980B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- unit
- error
- map matching
- positioning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/48—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system
- G01S19/49—Determining position by combining or switching between position solutions derived from the satellite radio beacon positioning system and position solutions derived from a further system whereby the further system is an inertial position system, e.g. loosely-coupled
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07B—TICKET-ISSUING APPARATUS; FARE-REGISTERING APPARATUS; FRANKING APPARATUS
- G07B15/00—Arrangements or apparatus for collecting fares, tolls or entrance fees at one or more control points
- G07B15/06—Arrangements for road pricing or congestion charging of vehicles or vehicle users, e.g. automatic toll systems
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Business, Economics & Management (AREA)
- Finance (AREA)
- Navigation (AREA)
- Instructional Devices (AREA)
- Devices For Checking Fares Or Tickets At Control Points (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
本発明は、通過検知システム、通過検知方法、通過検知装置、プログラム、及び記録媒体に関する。特に本発明は、車両が所定位置を通過した場合に、それを検知する通過検知システム、通過検知方法、通過検知装置、当該通過検知装置としてコンピュータを機能させるプログラム、並びに当該プログラムを記録した記録媒体に関する。 The present invention relates to a passage detection system, a passage detection method, a passage detection device, a program, and a recording medium. In particular, the present invention relates to a passage detection system, a passage detection method, a passage detection device, a program for causing a computer to function as the passage detection device when a vehicle passes a predetermined position, and a recording medium storing the program About.
現在、車両の位置特定は、GPS(Global Positioning System)による方法とジャイロ等を用いた自律航法の両方を併用したシステムによって行われているものが主流である。 At present, the position of a vehicle is mainly determined by a system using both a GPS (Global Positioning System) method and an autonomous navigation using a gyro.
GPSは、複数のGPS衛星からの電波を受信することによって、その物体の絶対位置を計測するシステムである。しかしながら、GPS衛星の電波が届かないビル陰やトンネルにおいては、このシステムによって車両の位置特定を行うことはできない。 GPS is a system that measures the absolute position of an object by receiving radio waves from a plurality of GPS satellites. However, the position of the vehicle cannot be determined by this system in a building or tunnel where GPS radio waves do not reach.
自律航法は、電波の届かない場所での車両の位置特定を行う目的で用いられる。自律航法においては、先ず初期位置を定めた後、車載の走行距離センサーと方位センサーによって初期位置からの移動距離、方向を計算し、自車位置を求める。走行距離センサーには、タイヤの回転数から走行距離を計測する車速センサーが主に用いられている。そして、方位センサーには、旋回方位と量を検出するジャイロが主に用いられている。 Autonomous navigation is used for the purpose of specifying the position of a vehicle in a place where radio waves do not reach. In autonomous navigation, first, an initial position is determined, and then a moving distance and direction from the initial position are calculated by an on-vehicle travel distance sensor and a direction sensor, thereby obtaining the vehicle position. As the travel distance sensor, a vehicle speed sensor that measures a travel distance from the number of rotations of a tire is mainly used. And the gyro which detects turning direction and quantity is mainly used for the direction sensor.
現在は、これら2つの技術を併用することによって数十メートル精度での自車位置特定を実現している。最近は、精度を高める技術も検討されている。例えば、既に実用化されているものとしては、DGPS(Differential GPS)と呼ばれる技術がある。この技術は、予め精確な位置が計測されている基準局におけるGPS衛星からの電波の届き具合を計測することにより電波が地上に到達するまでの誤差を把握し、これを示すディファレンシャル補正電波を近くの利用者に送信することによって10メートル程度の精度を実現するものである。 At present, by using these two technologies in combination, the vehicle position can be specified with an accuracy of several tens of meters. Recently, techniques for improving accuracy have been studied. For example, a technology called DGPS (Differential GPS) is already in practical use. This technology grasps the error until the radio wave reaches the ground by measuring the arrival state of the radio wave from the GPS satellite at the reference station where the accurate position is measured in advance, and the differential correction radio wave indicating this is near By transmitting to the user, an accuracy of about 10 meters is realized.
このような背景に関連する技術としては、様々なものが知られている(例えば、特許文献1参照。)。 Various techniques related to such a background are known (see, for example, Patent Document 1).
例えば、特許文献1には、車両に搭載され予め設定された課金エリアを車両が走行した際、課金エリアについて定められた課金レートと課金エリア内における走行距離に応じて車両に対して課金を行う装置が記載されている。より具体的に説明すると、この装置は、GPS衛星からの電波に応じて車両の位置を求め車両位置データを得る。そして、この装置は、課金エリアの位置を示す課金エリア情報が与えられ、車両位置データが示す車両の位置と課金エリア情報が示す課金エリアの位置とに応じて車両が課金エリアに近づいたか否かを判定して、車両が課金エリアに近づいたと判定すると、GPS衛星からの電波に応じて得られた基地局の位置と基地局が配置された基準点との誤差に応じた位置補正データを用いて測位を支援する基地局支援測位を起動する。そして、この装置は、位置補正データに応じて車両位置データを補正する。そして、この装置は、車両位置データに応じて車両が課金エリアに位置するか否かを判定して車両が課金エリアに位置する際の走行距離と課金レートとに応じて課金額を決定する。このようにして、この装置によっては、安価なコストによって、しかも課金エリアを通過する車両に対して適切な課金を行うことができる。 For example, in Patent Document 1, when a vehicle travels in a preset charging area mounted on the vehicle, the vehicle is charged according to the charging rate determined for the charging area and the travel distance in the charging area. An apparatus is described. More specifically, this apparatus obtains vehicle position data by obtaining the position of the vehicle in accordance with radio waves from GPS satellites. This device is given charging area information indicating the position of the charging area, and whether or not the vehicle has approached the charging area according to the position of the vehicle indicated by the vehicle position data and the position of the charging area indicated by the charging area information. If it is determined that the vehicle has approached the billing area, the position correction data according to the error between the position of the base station obtained according to the radio wave from the GPS satellite and the reference point where the base station is placed is used. Activate base station support positioning to support positioning. And this apparatus correct | amends vehicle position data according to position correction data. Then, this device determines whether or not the vehicle is positioned in the charging area according to the vehicle position data, and determines the charging amount according to the travel distance and the charging rate when the vehicle is positioned in the charging area. In this way, depending on this device, it is possible to charge the vehicle passing through the charging area at an inexpensive cost.
特許文献1に記載の装置のような、車載型のDGPSを用いた測位方法は、車両の位置を高精度、且つ効率的に測位するための有効な手段である。しかしながら、車両の位置特定は、上空視界が十分に確保できない位置や、ディファレンシャル補正電波の受信が困難な位置等においては、必ずしも保証された精度によって測位可能とは限らない。 A positioning method using an in-vehicle DGPS such as the device described in Patent Document 1 is an effective means for efficiently and efficiently positioning the position of a vehicle. However, the position of the vehicle cannot always be measured with a guaranteed accuracy at a position where the sky view is not sufficiently secured or at a position where it is difficult to receive the differential correction radio wave.
ところで、車両が有料道路の課金ポイントを通過した場合に課金処理を行うロードプライシングにおいては、課金処理を行う車載器は、車両が有料道路の課金ポイントを通過したか否かを精確に検知する必要がある。 By the way, in road pricing in which charging processing is performed when a vehicle passes a toll road charging point, the vehicle-mounted device that performs the charging processing needs to accurately detect whether the vehicle has passed the toll road charging point. There is.
しかしながら、上述したような、上空視界が十分に確保できない位置等においては、車両の位置を精確に測位することができないため、課金ポイントを通過したにも拘らず課金処理が行われなかったり、課金ポイントを通過していないにも拘らず課金処理が行われたりする虞がある。 However, at positions such as those described above where sufficient aerial view cannot be secured, the vehicle position cannot be accurately measured. There is a possibility that the billing process may be performed even though the points have not been passed.
上記課題を解決するために、本発明の第1の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知システムであって、電波航法と自律航法とを併用して自位置を測位する測位装置と、車両が所定位置を通過した場合に、それを検知する通過検知装置とを備え、通過検知装置は、測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する位置特定部と、位置特定部が特定した位置をマップマッチングするマップマッチング部と、位置特定部が特定した第1の位置と、マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、位置特定部が特定した位置の経時的変化に基づいて、車両が所定位置を通過したか否かを判定する通過判定部とを有し、通過判定部は、偶然誤差算出部が算出した偶然誤差の範囲内に所定位置が入っている場合、車両が所定位置を通過していないと判定する。 In order to solve the above-described problem, according to the first aspect of the present invention, there is provided a passage detection system for detecting when a vehicle passes a predetermined position, using both radio navigation and autonomous navigation. A positioning device that measures a position, and a passage detection device that detects when the vehicle passes a predetermined position, the passage detection device is prepared in advance for system error information related to a system error of a positioning result by the positioning device. And a position specifying unit for specifying the position of the vehicle by correcting the positioning result by the positioning device based on the traveling state of the vehicle, a map matching unit for map matching the position specified by the position specifying unit, and position specifying The coincidence error of the positioning result by the positioning device is calculated based on the amount of deviation between the first position specified by the unit and the second position indicated by the map matching result of the map matching unit A random error calculating unit that, based on the temporal change in the position of the position identifying unit has identified, the vehicle has a determining passage judgment section whether or not passed the predetermined position, passage determination unit, random error When the predetermined position is within the range of the accidental error calculated by the calculation unit, it is determined that the vehicle has not passed the predetermined position .
通過検知装置は、位置特定部が現在までに特定した位置の経時的変化に基づいて、車両の走行状態を特定する走行状態特定部を更に有し、位置特定部は、測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、走行状態特定部が特定した車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定してよい。 The passage detection device further includes a traveling state identifying unit that identifies a traveling state of the vehicle based on a temporal change in the position identified by the position identifying unit up to the present time, and the position identifying unit is configured to obtain a positioning result of the positioning device. The position of the vehicle may be specified by correcting the positioning result by the positioning device based on the system error information prepared in advance regarding the system error and the driving state of the vehicle specified by the driving state specifying unit.
通過検知装置は、車両が所定位置を通過した場合に、課金処理を行う課金処理部を更に有してよい。The passage detection device may further include a billing processing unit that performs billing processing when the vehicle passes a predetermined position.
本発明の第2の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知システムであって、電波航法と自律航法とを併用して自位置を測位する測位装置と、前記車両が前記所定位置を通過した場合に、それを検知する通過検知装置とを備え、前記通過検知装置は、前記測位装置による測位結果をマップマッチングするマップマッチング部と、前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部とを有する。 According to the second aspect of the present invention, when a vehicle passes a predetermined position, it is a passage detection system that detects the position by using both radio navigation and autonomous navigation. A passage detection device for detecting when the vehicle passes the predetermined position, the passage detection device map-matching a positioning result by the positioning device, and a positioning result by the positioning device A coincidence error calculation unit for calculating a coincidence error of a positioning result by the positioning device based on a deviation amount between the first position of the positioning unit and a second position indicated by a result of map matching performed by the map matching unit; A passage determining unit that determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculating unit. That.
本発明の第3の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知方法であって、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する位置特定段階と、位置特定段階において特定された位置をマップマッチングするマップマッチング段階と、位置特定段階において特定された第1の位置と、マップマッチング段階においてマップマッチングされた結果によって示される第2の位置とのずれ量に基づいて、測位装置による測位結果の偶然誤差を算出する偶然誤差算出段階と、位置特定段階において特定された位置の経時的変化に基づいて、車両が所定位置を通過したか否かを判定する通過判定段階とを含み、通過判定段階においては、偶然誤差算出段階において算出された偶然誤差の範囲内に所定位置が入っている場合、車両が所定位置を通過していないと判定する。 According to the third aspect of the present invention, there is provided a passage detection method for detecting when a vehicle has passed a predetermined position, and positioning by a positioning device that uses both radio navigation and autonomous navigation to determine the position of the vehicle. results and systematic error information prepared in advance regarding systematic error, based on the running state of the vehicle, by correcting the positioning result by the positioning device, a position specifying step of specifying the position of the vehicle, identified in the localization stage A positioning device based on the amount of deviation between the map matching stage for map matching the first position, the first position specified in the position specifying stage, and the second position indicated by the map matching result in the map matching stage a random error calculation step of calculating the accidental error of the positioning result by, based on the change over time in the specified position in the localization step, the vehicle is predetermined And a determining passage judgment step whether passing through the location, in the passage determination step, if within the scope of the accident is calculated errors in the random error calculation step contains the predetermined position, the vehicle position Judge that it has not passed .
本発明の第4の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知方法であって、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング段階と、前記測位装置による測位結果の第1の位置と、前記マップマッチング段階においてマップマッチングされた結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出段階と、前記偶然誤差算出段階において算出された偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定段階とを備える。 According to a fourth aspect of the present invention, there is provided a passage detection method for detecting when a vehicle has passed a predetermined position, and positioning is performed by a positioning device that uses both radio navigation and autonomous navigation to position itself. The positioning based on a map matching stage for map matching results, a first position of a positioning result by the positioning device, and a second position indicated by a map matching result in the map matching stage. If the predetermined position is within the range of the coincidence error calculated in the coincidence error calculation stage for calculating the coincidence error of the positioning result by the device and the coincidence error calculation stage, the vehicle has passed the predetermined position. A passage determination step for determining that there is no.
本発明の第5の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置であって、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する位置特定部と、位置特定部が特定した位置をマップマッチングするマップマッチング部と、位置特定部が特定した第1の位置と、マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、位置特定部が特定した位置の経時的変化に基づいて、車両が所定位置を通過したか否かを判定する通過判定部とを備え、通過判定部は、偶然誤差算出部が算出した偶然誤差の範囲内に所定位置が入っている場合、車両が所定位置を通過していないと判定する。 According to the fifth aspect of the present invention, when a vehicle passes a predetermined position, it is a passage detection device that detects the position by using a positioning device that uses both radio navigation and autonomous navigation to position itself. Based on the systematic error information prepared in advance relating to the systematic error of the result and the driving state of the vehicle, the positioning result by the positioning device is corrected, and the position specifying unit for specifying the position of the vehicle and the position specifying unit specified A positioning result by the positioning device based on the amount of deviation between the map matching unit for map matching the position, the first position specified by the position specifying unit, and the second position indicated by the result of the map matching performed by the map matching unit Bei and accidental coincidence error calculator for calculating an error based on the temporal change in the position of the position identifying unit has identified, vehicle and determining passage judgment section whether or not passed the predetermined position , Passage determination unit, when the random error calculating unit is within a predetermined position within the chance was calculated error, it determines that the vehicle has not passed the predetermined position.
本発明の第6の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置として、コンピュータを機能させるプログラムであって、前記コンピュータを、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部、前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部として機能させる。 According to a sixth aspect of the present invention, there is provided a program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position, and the computer uses both radio navigation and autonomous navigation. A map matching unit for map-matching a positioning result obtained by a positioning device that measures its own position, a first position of a positioning result obtained by the positioning device, and a second position indicated by a result of map matching performed by the map matching unit; A chance error calculation unit that calculates a coincidence error of a positioning result by the positioning device based on the amount of deviation, and when the predetermined position is within the range of the coincidence error calculated by the coincidence error calculation unit, the vehicle It is made to function as a passage determining unit that determines that the predetermined position has not been passed.
本発明の第7の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置として、コンピュータを機能させるプログラムであって、コンピュータを、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する位置特定部、位置特定部が特定した位置をマップマッチングするマップマッチング部、位置特定部が特定した第1の位置と、マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、位置特定部が特定した位置の経時的変化に基づいて、車両が所定位置を通過したか否かを判定する通過判定部として機能させ、通過判定部は、偶然誤差算出部が算出した偶然誤差の範囲内に所定位置が入っている場合、車両が所定位置を通過していないと判定する。 According to a seventh aspect of the present invention, there is provided a program for causing a computer to function as a passage detection device that detects when a vehicle has passed a predetermined position, wherein the computer is used in combination with radio navigation and autonomous navigation. A position for identifying the position of the vehicle by correcting the positioning result by the positioning device based on the system error information prepared in advance relating to the systematic error of the positioning result by the positioning device that measures the own position and the running state of the vehicle. The specific part, the map matching part for map matching the position specified by the position specifying part, the first position specified by the position specifying part, and the shift amount between the second position indicated by the result of map matching by the map matching part based on, random error calculation unit for calculating a random error of the positioning result by the positioning device, based on the temporal change in the position of the position identifying unit has identified, vehicle To function as a determining passage determination unit whether passed the predetermined position, passage determination unit, when the random error calculating unit is within a predetermined position within the chance was calculated error, the vehicle passed through a predetermined position Judge that it is not .
本発明の第8の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置として、コンピュータを機能させるプログラムであって、前記コンピュータを、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部、前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部として機能させる。 According to an eighth aspect of the present invention, there is provided a program for causing a computer to function as a passage detection device that detects when a vehicle has passed a predetermined position, wherein the computer is used in combination with radio navigation and autonomous navigation. A map matching unit for map-matching a positioning result obtained by a positioning device that measures its own position, a first position of a positioning result obtained by the positioning device, and a second position indicated by a result of map matching performed by the map matching unit; A chance error calculation unit that calculates a coincidence error of a positioning result by the positioning device based on the amount of deviation, and when the predetermined position is within the range of the coincidence error calculated by the coincidence error calculation unit, the vehicle It is made to function as a passage determining unit that determines that the predetermined position has not been passed.
本発明の第9の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置として、コンピュータを機能させるプログラムを記録した記録媒体であって、コンピュータを、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する位置特定部、位置特定部が特定した位置をマップマッチングするマップマッチング部、位置特定部が特定した第1の位置と、マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、位置特定部が特定した位置の経時的変化に基づいて、車両が所定位置を通過したか否かを判定する通過判定部として機能させ、通過判定部は、偶然誤差算出部が算出した偶然誤差の範囲内に所定位置が入っている場合、車両が所定位置を通過していないと判定する。 According to a ninth aspect of the present invention, there is provided a recording medium recording a program that causes a computer to function as a passage detection device that detects when a vehicle has passed a predetermined position. Based on the system error information prepared in advance for the systematic error of the positioning result by the positioning device that uses the navigation and the positioning device, and the driving state of the vehicle, the positioning result by the positioning device is corrected and the vehicle A position specifying unit for specifying a position, a map matching unit for map matching the position specified by the position specifying unit, a first position specified by the position specifying unit, and a second position indicated by the result of map matching by the map matching unit based on the shift amount between, random error calculation unit for calculating a random error of the positioning result by the positioning device, the position specifying unit over time-varying specified position Based on, if the vehicle is allowed to function as a passage determination unit determines whether or not passed the predetermined position, passage determination unit, the random error calculating unit is within a predetermined position within the chance was calculated error, It is determined that the vehicle has not passed the predetermined position .
本発明の第10の形態によると、車両が所定位置を通過した場合に、それを検知する通過検知装置として、コンピュータを機能させるプログラムを記録した記録媒体であって、前記コンピュータを、電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部、前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部として機能させるプログラムを記録した。 According to a tenth aspect of the present invention, there is provided a recording medium recording a program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position, the computer being a radio navigation system. A map matching unit that performs map matching on a positioning result obtained by a positioning device that uses autonomous navigation in combination with the positioning device, a first position of the positioning result obtained by the positioning device, and a map matching result of the map matching unit. Based on the amount of deviation from the second position, a coincidence error calculation unit for calculating a coincidence error of the positioning result by the positioning device, and the predetermined position is within the range of the coincidence error calculated by the coincidence error calculation unit. In this case, a program is recorded that causes the vehicle to function as a passage determining unit that determines that the vehicle has not passed the predetermined position.
なおまた、上記の発明の概要は、本発明の必要な特徴の全てを列挙したものではない。また、これらの特徴群のサブコンビネーションもまた、発明となり得る。 The above summary of the invention does not enumerate all necessary features of the present invention. Also, a sub-combination of these feature groups can also be an invention.
以上の説明から明らかなように、この発明によっては、例えば、上空視界が十分に確保できないような道路を走行していても、測位装置による測位結果の誤差の影響を受けることなく、車両が所定位置を通過した場合に、それを検知することができる。 As is apparent from the above description, according to the present invention, for example, even if the vehicle is traveling on a road where sufficient aerial view is not secured, the vehicle is not affected by the error in the positioning result by the positioning device. If it passes through the position, it can be detected.
以下、発明の実施の形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲にかかる発明を限定するものではなく、また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。 Hereinafter, the present invention will be described through embodiments of the invention. However, the following embodiments do not limit the claimed invention, and all combinations of features described in the embodiments are described below. However, this is not always essential for the solution of the invention.
図1は、一実施形態に係る通過検知システム100の利用環境の一例を示す。通過検知システム100は、車両が課金ポイントを通過した場合に、それを検知するシステムである。ここで、課金ポイントとは、ロードプライシングにおいて課金処理を行うべき位置である。なおまた、課金ポイントは、この発明における「所定位置」の一例であってよい。
FIG. 1 shows an example of a use environment of a
通過検知システム100は、車載器110、GPS受信機130、及びディスプレイ150を備える。なおまた、車載器110は、この発明における「通過検知装置」の一例であってよい。また、GPS受信機130は、この発明における「測位装置」の一例であってよい。
The
GPS受信機130は、電波航法と自律航法とを併用して自位置を測位する装置である。より具体的に説明すると、GPS受信機130は、GPSアンテナ、加速度計、及び角速度計を備える。ここで、GPSアンテナは、GPS衛星からの電波を受信するアンテナである。また、加速度計は、車両が移動する際の加速度変化を計測する計測器である。また、角速度計は、車両が移動する際の角速度変化を計測する計測器である。GPS受信機130は、例えば、車両のダッシュボードDの上等のような、GPSアンテナが遮蔽されない位置に設けられている。そして、GPS受信機130は、車載器110と電気的に接続されている。そして、GPS受信機130は、GPSによる電波航法と、加速度計、及び角速度計を用いた自律航法とを併用して自位置を測位する。そして、GPS受信機130は、その測位結果を示すデータを、車載器110へ出力する。
The
車載器110は、車両が課金ポイントを通過した場合に、それを検知する装置である。より具体的に説明すると、車載器110は、例えば、車両のセンターコンソールCの側面等のような、運転の邪魔にならずに、ドライバーの手の届く位置に設けられている。そして、車載器110は、GPS受信機130、及びディスプレイ150と電気的に接続されている。そして、車載器110のカードスロットIには、IC(Integrated Circuit)カードが挿入される。ここで、ICカード内には、通過検知システム100の利用者の情報や、利用履歴をはじめとする課金情報等を格納する不揮発性メモリの他、セキュリティ機能を実現するためのアプリケーションデータ等が実装される。そして、車載器110は、GPS受信機130から出力されたデータの入力を受け付けると、車両が課金ポイントを通過したか否かを判定する。そして、車載器110は、車両が課金ポイントを通過したと判定した場合、課金処理を行う。そして、車載器110は、課金処理の結果を示すデータを、ディスプレイ150へ出力する。
The vehicle-mounted
ディスプレイ150は、文字や図形を表示する装置である。より具体的に説明すると、ディスプレイ150は、例えば、車両のセンターコンソールC等のような、ドライバーが視認し得る位置に設けられている。そして、ディスプレイ150は、車載器110と電気的に接続されている。そして、ディスプレイ150は、車載器110から出力されたデータの入力を受け付けると、そのデータによって示される課金処理の結果を表示する。
The
なおまた、本実施形態においては、説明が煩雑になることを防ぐことを目的として、通過検知システム100が一のGPS受信機130、及びディスプレイ150を備える構成について説明する。しかしながら、通過検知システム100は、複数のGPS受信機130、及びディスプレイ150を備えてよい。
In the present embodiment, a configuration in which the
図2は、車載器110のブロック構成の一例を示す。車載器110は、測位結果データ入力受付部111、位置特定部112、マップマッチング部113、走行状態特定部114、偶然誤差算出部115、通過判定部116、課金処理部117、データ出力部118、地図データ格納部119、系統誤差情報格納部120、及び課金ポイント情報格納部121を有する。以下の説明においては、各構成要素の機能、及び動作を詳述する。
FIG. 2 shows an example of a block configuration of the vehicle-mounted
測位結果データ入力受付部111は、GPS受信機130から出力された、測位結果を示すデータの入力を受け付ける。
The positioning result data
位置特定部112は、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、GPS受信機130による測位結果を補正して、車両の位置を特定する。より具体的に説明すると、位置特定部112は、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、走行状態特定部114が特定した車両の走行状態とに基づいて、GPS受信機130による測位結果を補正して、車両の位置を特定する。ここで、車両の走行状態とは、大別すると、車両が走行しているか、停止しているかのいずれかを指すものとする。そして、走行している車両の走行状態とは、直進しているか、右に曲がりながら進行しているか、左に曲がりながら進行しているかのいずれかを指すものとする。また、系統誤差とは、同じ位置において、同じ走行状態にて測位する限り、その位置の真の位置座標に対して、GPS受信機130による測位結果の位置座標が系統的にずれて測定される誤差を指すものとする。ここで、真の位置座標とは、例えば、地図上の位置座標である。
The
マップマッチング部113は、位置特定部112が特定した位置をマップマッチングする。ここで、マップマッチングとは、車両は道路を走るものだという前提を以て、位置特定部112が特定した位置が地図上の道路外にあろうとも、強制的に地図上の道路内に合わせる処理である。
The
走行状態特定部114は、位置特定部112が現在までに特定した位置の経時的変化に基づいて、車両の走行状態を特定する。
The traveling
偶然誤差算出部115は、位置特定部112が特定した第1の位置と、マップマッチング部113がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、GPS受信機130による測位結果の偶然誤差を算出する。ここで、偶然誤差とは、同じ位置において、同じ走行状態にて測位しても、測位毎にばらつく誤差を指すものとする。
The accidental
通過判定部116は、位置特定部112が特定した位置の経時的変化に基づいて、車両が課金ポイントを通過したか否かを判定する。より具体的に説明すると、通過判定部116は、偶然誤差算出部115が算出した偶然誤差の範囲内に課金ポイントが入っている場合、車両が課金ポイントを通過していないと判定する。
The
課金処理部117は、車両が課金ポイントを通過した場合に、課金処理を行う。
The
データ出力部118は、課金処理の結果を示すデータを、ディスプレイ150へ出力する。
The
地図データ格納部119には、デジタル地図のデータが格納されている。ここで、デジタル地図とは、電子化されコンピュータ処理が可能な地図である。
The map
図3は、系統誤差情報格納部120に格納されている情報の一例をテーブル形式で示す。系統誤差情報格納部120には、真の位置座標(経度、緯度)、車両の走行状態、及び測位結果の位置座標(経度、緯度)の各情報が対応付けられて格納されている。なおまた、系統誤差情報格納部120に格納されている情報は、この発明における「系統誤差情報」の一例であってよい。
FIG. 3 shows an example of information stored in the systematic error
「真の位置座標(経度、緯度)」の情報は、デジタル地図上の経緯度を示す情報である。より具体的に説明すると、「真の位置座標(経度、緯度)」の情報は、課金ポイントの周辺において、GPS受信機130の測位結果に系統誤差が生じる位置のデジタル地図上の経緯度を示す。
The information of “true position coordinates (longitude, latitude)” is information indicating the longitude and latitude on the digital map. More specifically, the information of “true position coordinates (longitude, latitude)” indicates the longitude and latitude on the digital map of the position where a systematic error occurs in the positioning result of the
「車両の走行状態」の情報は、「真の位置座標(経度、緯度)」の情報によって示される位置における車両の走行状態を示す情報である。 The “vehicle running state” information is information indicating the vehicle running state at the position indicated by the “true position coordinates (longitude, latitude)” information.
「測位結果の位置座標(経度、緯度)」の情報は、「真の位置座標(経度、緯度)」の情報によって示される位置において、車両の走行状態が「車両の走行状態」の情報によって示される状態である場合の、GPS受信機130の測位結果を示す情報である。より具体的に説明すると、「真の位置座標(経度、緯度)」の情報によって示される位置座標と、「測位結果の位置座標(経度、緯度)」の情報によって示される位置座標とのずれ量は、「真の位置座標(経度、緯度)」の情報によって示される位置において、車両の走行状態が「車両の走行状態」の情報によって示される状態である場合の系統誤差となる。
The information on the “position coordinates (longitude, latitude) of the positioning result” indicates that the driving state of the vehicle is indicated by the information of “vehicle driving state” at the position indicated by the information of “true position coordinates (longitude, latitude)”. It is the information which shows the positioning result of the
即ち、図3に示す例の場合、例えば、GPS受信機130による測位結果の位置座標が「(Eb、Nb)」であって、そのときの車両の走行状態が「直進」であれば、その車両が存在している真の位置座標は、「(Ea、Na)」であることを示している。また、GPS受信機130による測位結果の位置座標が「(Eb、Nb)」であっても、そのときの車両の走行状態が「停止」であれば、その車両が存在している真の位置座標は、「(Ed、Nd)」であることを示している。また、真の位置座標が「(Ea、Na)」であっても、その位置における車両の走行状態が「右に曲がりながら進行」であれば、GPS受信機130による測位結果は、「(Ec、Nc)」となることを示している。
That is, in the case of the example shown in FIG. 3, for example, if the position coordinate of the positioning result by the
図4は、課金ポイント情報格納部121に格納されている情報の一例をテーブル形式で示す。課金ポイント情報格納部121には、課金ポイントID(identifier)、位置座標(経度、緯度)、及び料金(円)の各情報が対応付けられて格納されている。
FIG. 4 shows an example of information stored in the charging point
「課金ポイントID」の情報は、複数の課金ポイントの中で、各課金ポイントを一意に識別するための識別符号である。 The information of “charging point ID” is an identification code for uniquely identifying each charging point among a plurality of charging points.
「位置座標(経度、緯度)」の情報は、「課金ポイントID」の情報によって示される課金ポイントのデジタル地図上の経緯度を示す情報である。 The “position coordinates (longitude, latitude)” information is information indicating the longitude and latitude on the digital map of the charging point indicated by the information of “charging point ID”.
「料金(円)」の情報は、「課金ポイントID」の情報によって示される課金ポイントを通過する際に、課金処理すべき料金の金額を示す情報である。 The “charge (yen)” information is information indicating the amount of the charge to be charged when passing through the charge point indicated by the information of “charge point ID”.
即ち、図4に示す例の場合、例えば、位置座標が「(Ef、Nf)」の位置にある課金ポイントは、「200(円)」が課金される課金ポイントであることを示している。 That is, in the case of the example shown in FIG. 4, for example, the charging point at the position “(Ef, Nf)” is a charging point for which “200 (yen)” is charged.
図5は、車載器110の動作フローの一例を示す。この動作フローの説明においては、車両の位置をマップマッチングする処理について詳述する。なおまた、この動作フローの説明においては、図1から図4を共に参照する。
FIG. 5 shows an example of the operation flow of the vehicle-mounted
GPS受信機130は、GPSによる電波航法と、加速度計、及び角速度計を用いた自律航法とを併用して自位置を所定時間置きに測位する。そして、GPS受信機130は、その測位結果を示すデータを、車載器110へ順次出力する。
The
車載器110の測位結果データ入力受付部111は、GPS受信機130から出力された、測位結果を示すデータの入力を受け付けると(S101)、そのデータを、位置特定部112へ送る。
When the positioning result data
車載器110の位置特定部112は、測位結果データ入力受付部111から送られたデータを受け取ると、系統誤差情報格納部120に格納されている情報と、走行状態特定部114から受け取ったデータによって示される車両の走行状態とに基づいて、測位結果データ入力受付部111から受け取ったデータによって示される測位結果を補正して、車両の位置を特定する(S102)。
When the
例えば、測位結果データ入力受付部111から受け取ったデータによって示される位置座標が「(Ea、Na)」であって、走行状態特定部114から受け取った最新のデータによって示される車両の走行状態が「直進」であれば、位置特定部112は、系統誤差情報格納部120に格納されている情報のうち、「測位結果の位置座標(経度、緯度)」の情報が「(Ea、Na)」、「車両の走行状態」の情報が「直進」に対応付けられて格納されている「真の位置座標(経度、緯度)」の情報「(Eb、Nb)」を読み出す。そして、位置特定部112は、その位置座標(Ea、Na)を、補正後の車両の位置として特定する。
For example, the position coordinate indicated by the data received from the positioning result data
ここで、測位結果データ入力受付部111から送られたデータによって示される測位結果と同じ位置座標が、系統誤差情報格納部120の「測位結果の位置座標(経度、緯度)」の情報として格納されていない場合、位置特定部112は、測位結果データ入力受付部111から受け取ったデータによって示される測位結果の位置座標を、そのまま車両の位置として特定する。これは、系統誤差情報格納部120に該当する情報が格納されていない場合、その位置においては、系統誤差が発生していないことを意味するからである。
Here, the same position coordinates as the positioning results indicated by the data sent from the positioning result data
そして、位置特定部112は、このようにして特定した車両の位置座標を示すデータを、マップマッチング部113、走行状態特定部114、及び偶然誤差算出部115へ送る。
Then, the
車載器110のマップマッチング部113は、位置特定部112から送られたデータを受け取ると、そのデータによって示される位置座標をマップマッチングする(S103)。例えば、マップマッチング部113は、地図上の道路形状や、車両の走行パターン履歴等をデータとして用い、ヒューリスティックなアルゴリズムを利用して、位置特定部112から送られたデータによって示される位置座標をマップマッチングする。そして、マップマッチング部113は、マップマッチング後の位置座標を示すデータを、走行状態特定部114、偶然誤差算出部115、及び通過判定部116へ送る。
When the
車載器110の走行状態特定部114は、位置特定部112、及びマップマッチング部113から送られたデータをそれぞれ受け取ると、これらのデータによって示される位置座標の経時的変化に基づいて、車両の走行状態を特定する(S104)。
When the traveling
先ず、走行状態特定部114は、位置特定部112から受け取ったデータによって示される位置座標の経時的変化に基づいて、車両が走行しているか、停止しているかを特定する。例えば、所定時間内に位置特定部112から受け取った複数のデータによって示される位置座標の経時的な変化量が所定値未満である場合、走行状態特定部114は、車両が停止していると特定する。また、所定時間内に位置特定部112から受け取った複数のデータによって示される位置座標の経時的な変化量が所定値以上である場合、走行状態特定部114は、車両が走行していると特定する。
First, the traveling
そして、車両が走行していると特定した場合、走行状態特定部114は、マップマッチング部113から受け取ったデータによって示される位置座標の経時的変化に基づいて、車両が直進しているか、右に曲がりながら進行しているか、左に曲がりながら進行しているかを特定する。例えば、所定時間内にマップマッチング部113から受け取った複数のデータによって示される位置座標の経時的な変化が直線的である場合、走行状態特定部114は、車両が直進していると特定する。また、所定時間内にマップマッチング部113から受け取った複数のデータによって示される位置座標の経時的な変化が北東、又は南西に変化している場合、走行状態特定部114は、車両が右に曲がりながら進行していると特定する。また、所定時間内にマップマッチング部113から受け取った複数のデータによって示される位置座標の経時的な変化が北西、又は南東に変化している場合、走行状態特定部114は、車両が左に曲がりながら進行していると特定する。
Then, when it is determined that the vehicle is traveling, the traveling
そして、走行状態特定部114は、特定した車両の走行状態を示すデータを、位置特定部112へ送る。
Then, the traveling
上述したように、位置特定部112は、測位結果データ入力受付部111から送られたデータを受け取ると、系統誤差情報格納部120に格納されている情報と、走行状態特定部114から受け取ったデータによって示される車両の走行状態とに基づいて、測位結果データ入力受付部111から受け取ったデータによって示される測位結果を補正して、車両の位置を特定する(S102)。
As described above, when the
このようにして、車載器110は、GPS受信機130から出力されたデータの入力を受け付ける度に、ステップS101〜S104の処理を繰り返して、車両の位置をマップマッチングする。
In this way, each time the vehicle-mounted
図6は、車載器110の動作フローの一例を示す。この動作フローの説明においては、車両の現在位置における偶然誤差の範囲を算出する処理について詳述する。なおまた、この動作フローの説明においては、図1から図5、7を共に参照する。図7は、偶然誤差の範囲の算出方法の一例を示す。また、図6に示す動作フローのステップのうち、図5に示す動作フローと同じ符号を付しているステップは、同様の動作を示す。
FIG. 6 shows an example of the operation flow of the vehicle-mounted
上述したように、位置特定部112は、車両の位置座標を特定する度に、その位置座標を示すデータを、偶然誤差算出部115へ送る。また、マップマッチング部113は、マップマッチングを行う度に、マップマッチング後の位置座標を示すデータを、偶然誤差算出部115へ送る。
As described above, every time the
車載器110の偶然誤差算出部115は、位置特定部112、及びマップマッチング部113から送られたデータをそれぞれ受け取ると、位置特定部112から受け取ったデータによって示される位置座標と、マップマッチング部113から受け取ったデータによって示される位置座標とのずれ量に基づいて、GPS受信機130による測位結果の偶然誤差の範囲を逐次算出する(S105)。ここで、位置特定部112から受け取ったデータによって示される位置座標は、この発明における「第1の位置」の一例であってよい。また、マップマッチング部113から受け取ったデータによって示される位置座標は、この発明における「第2の位置」の一例であってよい。
The accidental
例えば、偶然誤差算出部115は、図7に示すように、位置特定部112が特定した位置P71における偶然誤差の範囲Ecを算出する場合、その位置P71に車両が至るまでの所定時間内に、位置特定部112が特定した各位置P1〜Pnの位置座標と、その各位置P1〜Pnをマップマッチング部113がマップマッチングした結果の各位置M1〜Mnの位置座標とのずれ量E1〜Enについて、二乗平均平方根Errを算出する(式(1))。
For example, as shown in FIG. 7, when the accident
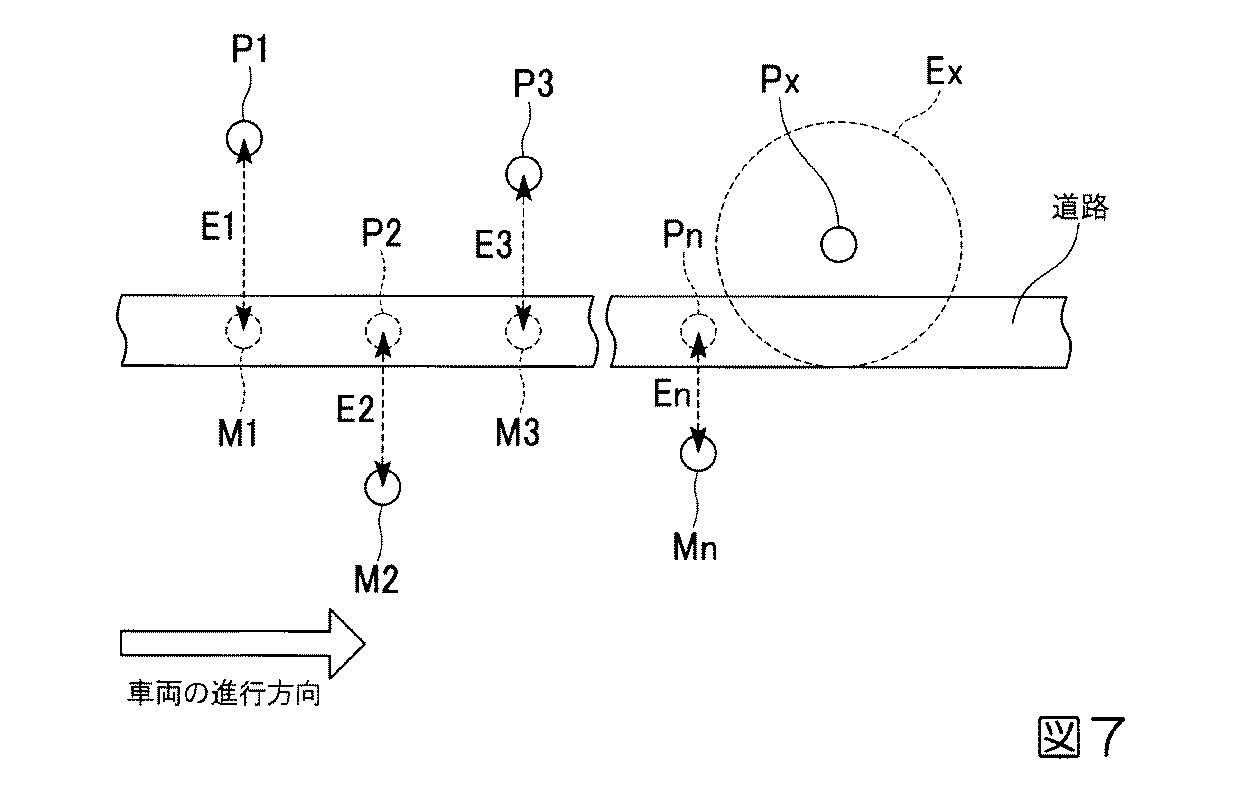
そして、偶然誤差算出部115は、その二乗平均平方根Errの値をN(Nは正数)倍して、偶然誤差の範囲を算出する。偶然誤差の範囲は、Nの値が大きいほど広くなる。そして、偶然誤差算出部115は、算出した偶然誤差の範囲を示すデータを、通過判定部116へ送る。
Then, the chance
このようにして、車載器110は、車両の現在位置における偶然誤差の範囲を参照して処理を行うことができるようになる。
In this way, the vehicle-mounted
図8は、車載器110の動作フローの一例を示す。この動作フローの説明においては、車両が課金ポイントを通過した場合に、それを検知する処理について詳述する。なおまた、この動作フローの説明においては、図1から図7を共に参照する。また、図8に示す動作フローのうち、図5、図6に示す動作フローと同じ符号を付しているステップは、同様の動作を示す。
FIG. 8 shows an example of the operation flow of the vehicle-mounted
上述したように、マップマッチング部113は、マップマッチングを行う度に、マップマッチング後の位置座標を示すデータを、通過判定部116へ送る。また、偶然誤差算出部115は、偶然誤算の範囲を算出する度に、その偶然誤差の範囲を示すデータを、通過判定部116へ送る。
As described above, the
車載器110の通過判定部116は、マップマッチング部113、及び偶然誤差算出部115から送られたデータをそれぞれ受け取ると、これらのデータによって示される情報に基づいて、車両が課金ポイントを通過したか否かを逐次判定する(S106)。例えば、通過判定部116は、マップマッチング部113から受け取ったデータによって示されるマップマッチング後の位置座標と、課金ポイント情報格納部121に格納されている「位置座標(経度、緯度)」の情報によって示される位置座標とを比較する。そして、マップマッチング後の位置座標が、いずれかの「位置座標(経度、緯度)」の情報によって示される位置座標のしきい値内に入った場合、通過判定部116は、その「位置座標(経度、緯度)」の情報によって示される位置座標にある課金ポイントを対象にして通過判定を開始する。例えば、マップマッチング後の位置座標を中心とする、偶然誤差算出部115から受け取ったデータによって示される偶然誤差の範囲内に、通過判定の対象の課金ポイントの位置座標が入っている間、通過判定部116は、車両がその課金ポイントを通過していないと判定する(S106:No)。そして、マップマッチング後の位置座標を中心とする偶然誤差の範囲から、通過判定の対象の課金ポイントの位置座標が外れた場合、通過判定部116は、車両がその課金ポイントを通過したと判定する(S106:Yes)。このようにして、通過判定部116は、車両が課金ポイントを通過したと判定すると、その課金ポイントの「課金ポイントID」の情報を示すデータを、課金処理部117へ送る。
When the
車載器110の課金処理部117は、通過判定部116から送られたデータを受け取ると、課金ポイント情報格納部121に格納されている「料金(円)」の情報のうち、通過判定部116から受け取ったデータによって示される「課金ポイントID」の情報に対応付けられて格納されている「料金(円)」の情報を読み出す。そして、課金処理部117は、その情報によって示される料金と同額の電子マネーを、車載器110のカードスロットIに挿入されているICカードから引き去り処理することによって、通行料金を課金する(S107)。そして、課金処理部117は、その課金処理の結果を示すデータを、データ出力部118へ送る。
Upon receiving the data sent from the
車載器110のデータ出力部118は、課金処理部117から送られたデータを受け取ると、そのデータによって示される課金処理の結果を表示させるためのデータを、ディスプレイ150へ出力する(S108)。
When the
このようにして、ディスプレイ150には、課金処理の結果が表示されることになる。
In this way, the result of the billing process is displayed on the
なおまた、通過検知システム100は、ディスプレイ150の代わりに、又はディスプレイ150と共に、スピーカを備えてもよい。その場合、車載器のデータ出力部118は、課金処理の結果を音声出力させるためのデータを、スピーカへ出力する。
In addition, the
以上、説明したように、通過検知システム100は、電波航法と自律航法とを併用して自位置を測位するGPS受信機130を備える。また、通過検知システム100は、車両が課金ポイントを通過した場合に、それを検知する車載器110を備える。そして、車載器110は、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、測位装置による測位結果を補正して、車両の位置を特定する。そして、車載器110は、特定した位置の経時的変化に基づいて、車両が課金ポイントを通過したか否かを判定する。
As described above, the
このようにして、通過検知システム100によっては、例えば、上空視界が十分に確保できないような道路を走行していても、GPS受信機130による測位結果の系統誤差の影響を受けることなく、車両が課金ポイントを通過した場合に、それを検知することができる。
In this way, depending on the
また、上述したように、車載器110は、現在までに特定した車両の位置の経時的変化に基づいて、車両の走行状態を特定する。そして、車載器110は、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、特定した車両の走行状態とに基づいて、GPS受信機130による測位結果を補正して、車両の位置を特定する。
Moreover, as above-mentioned, the
このようにして、通過検知システム100によっては、車両の位置を特定する度に、その車両の走行状態を特定することができる。
In this way, depending on the
また、上述したように、車載器110は、特定した車両の位置をマップマッチングする。そして、車載器110は、特定した車両の位置と、マップマッチングした結果によって示される位置とのずれ量に基づいて、GPS受信機130による測位結果の偶然誤差を算出する。そして、車載器110は、算出した偶然誤差の範囲内に課金ポイントが入っている場合、車両が課金ポイントを通過していないと判定する。
Moreover, as above-mentioned, the
このようにして、通過検知システム100によっては、偶然誤差の影響を受けて、車両が課金ポイントを通過していないにも拘らず、車両が課金ポイントを通過したとの誤判定をしないようにすることができる。
In this way, depending on the
なおまた、上述した実施形態においては、車載器110が、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、GPS受信機130による測位結果を補正して特定した車両の第1の位置と、その第1の位置をマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、GPS受信機130による測位結果の偶然誤差を算出する例について説明した。しかしながら、車載器110は、GPS受信機130による測位結果の偶然誤差を、他の方法によっても算出することができる。例えば、車載器110は、GPS受信機130による測位結果の第1の位置と、GPS受信機130による測位結果をマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、GPS受信機130による測位結果の偶然誤差を算出するようにしてもよい。
In the above-described embodiment, the vehicle-mounted
図9は、本実施形態に係る車載器110を構成するコンピュータ800のハードウェア構成の一例を示す。本実施形態に係るコンピュータ800は、ホストコントローラ801により相互に接続されるCPU(Central Processing Unit)802、RAM(Random Access Memory)803、グラフィックコントローラ804、及びディスプレイ805を有するCPU周辺部と、入出力コントローラ806により相互に接続される通信インターフェース807、ハードディスクドライブ808、及びCD−ROM(Compact Disk Read Only Memory)ドライブ809を有する入出力部と、入出力コントローラ806に接続されるROM(Read Only Memory)810、フレキシブルディスクドライブ811、及び入出力チップ812を有するレガシー入出力部とを備える。
FIG. 9 shows an example of a hardware configuration of a
ホストコントローラ801は、RAM803と、高い転送レートでRAM803をアクセスするCPU802、及びグラフィックコントローラ804とを接続する。CPU802は、ROM810、及びRAM803に格納されたプログラムに基づいて動作し、各部の制御を行う。グラフィックコントローラ804は、CPU802等がRAM803内に設けたフレームバッファ上に生成する画像データを取得し、ディスプレイ805上に表示させる。これに代えて、グラフィックコントローラ804は、CPU802等が生成する画像データを格納するフレームバッファを、内部に含んでもよい。
The
入出力コントローラ806は、ホストコントローラ801と、比較的高速な入出力装置である通信インターフェース807、ハードディスクドライブ808、及びCD−ROMドライブ809を接続する。ハードディスクドライブ808は、コンピュータ800内のCPU802が使用するプログラム、及びデータを格納する。CD−ROMドライブ809は、CD−ROM892からプログラム、又はデータを読み取り、RAM803を介してハードディスクドライブ808に提供する。
The input /
また、入出力コントローラ806には、ROM810と、フレキシブルディスクドライブ811、及び入出力チップ812の比較的低速な入出力装置とが接続される。ROM810は、コンピュータ800が起動時に実行するブートプログラム、及び/又はコンピュータ800のハードウェアに依存するプログラム等を格納する。フレキシブルディスクドライブ811は、フレキシブルディスク893からプログラム、又はデータを読み取り、RAM803を介してハードディスクドライブ808に提供する。入出力チップ812は、フレキシブルディスクドライブ811を入出力コントローラ806へと接続すると共に、例えばパラレルポート、シリアルポート、キーボードポート、マウスポート等を介して各種の入出力装置を入出力コントローラ806へと接続する。
In addition, the input /
RAM803を介してハードディスクドライブ808に提供されるプログラムは、フレキシブルディスク893、CD−ROM892、又はIC(Integrated Circuit)カード等の記録媒体に格納されて利用者によって提供される。プログラムは、記録媒体から読み出され、RAM803を介してコンピュータ800内のハードディスクドライブ808にインストールされ、CPU802において実行される。
A program provided to the
コンピュータ800にインストールされ、コンピュータ800を車載器110として機能させるプログラムは、コンピュータ800を、ステップS102において、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、車両の走行状態とに基づいて、GPS受信機130による測位結果を補正して、車両の位置を特定する位置特定部112と、位置特定部112が特定した位置の経時的変化に基づいて、ステップS106において、車両が課金ポイントを通過したか否かを判定する通過判定部116として機能させる。
A program that is installed in the
更に、当該プログラムは、コンピュータ800を、位置特定部112が現在までに特定した位置の経時的変化に基づいて、ステップS104において、車両の走行状態を特定する走行状態特定部114と、GPS受信機130による測位結果の系統誤差に関する予め用意された系統誤差情報と、走行状態特定部114が特定した車両の走行状態とに基づいて、ステップS102において、GPS受信機130による測位結果を補正して、車両の位置を特定する位置特定部112として機能させてもよい。
In addition, the program includes a
更に、当該プログラムは、コンピュータ800を、位置特定部112が特定した位置を、ステップS103において、マップマッチングするマップマッチング部113と、位置特定部112が特定した位置と、マップマッチング部113がマップマッチングした結果によって示される位置とのずれ量に基づいて、ステップS105において、GPS受信機130による測位結果の偶然誤差を算出する偶然誤差算出部115と、偶然誤差算出部115が算出した偶然誤差の範囲内に課金ポイントが入っている場合、ステップS106において、車両が課金ポイントを通過していないと判定する通過判定部116として機能させてもよい。
The program further includes the
これらのプログラムに記述された情報処理は、コンピュータ800に読み込まれることにより、ソフトウェアと上述した各種のハードウェア資源とが協働した具体的手段である測位結果データ入力受付部111、位置特定部112、マップマッチング部113、走行状態特定部114、偶然誤差算出部115、通過判定部116、課金処理部117、データ出力部118、地図データ格納部119、系統誤差情報格納部120、及び課金ポイント情報格納部121として機能する。そして、これらの具体的手段によって、本実施形態におけるコンピュータ800の使用目的に応じた情報の演算、又は加工を実現することにより、使用目的に応じた特有の車載器110が構築される。
The information processing described in these programs is read into the
一例として、コンピュータ800と外部の装置等との間で通信を行う場合には、CPU802は、RAM803上にロードされた通信プログラムを実行し、通信プログラムに記述された処理内容に基づいて、通信インターフェース807に対して通信処理を指示する。通信インターフェース807は、CPU802の制御を受けて、RAM803、ハードディスクドライブ808、フレキシブルディスク893、又はCD−ROM892等の記憶装置上に設けた送信バッファ領域等に記憶された送信データを読み出してネットワークへと送信し、もしくは、ネットワークから受信した受信データを記憶装置上に設けた受信バッファ領域等へと書き込む。このように、通信インターフェース807は、ダイレクトメモリアクセス方式により記憶装置との間で送受信データを転送してもよく、これに代えて、CPU802が転送元の記憶装置、又は通信インターフェース807からデータを読み出し、転送先の通信インターフェース807、又は記憶装置へとデータを書き込むことにより送受信データを転送してもよい。
As an example, when communication is performed between the
また、CPU802は、ハードディスクドライブ808、CD−ROM892、フレキシブルディスク893等の外部記憶装置に格納されたファイル、又はデータベース等の中から、全部、又は必要な部分をダイレクトメモリアクセス転送等によりRAM803へと読み込ませ、RAM803上のデータに対して各種の処理を行う。そして、CPU802は、処理を終えたデータを、ダイレクトメモリアクセス転送等により外部記憶装置へと書き戻す。
In addition, the
このような処理において、RAM803は、外部記憶装置の内容を一時的に保持するものとみなせるから、本実施形態においてはRAM803、及び外部記憶装置等をメモリ、記憶部、又は記憶装置等と総称する。本実施形態における各種のプログラム、データ、テーブル、データベース等の各種の情報は、このような記憶装置上に格納されて、情報処理の対象となる。なおまた、CPU802は、RAM803の一部をキャッシュメモリに保持し、キャッシュメモリ上で読み書きを行うこともできる。このような形態においても、キャッシュメモリはRAM803の機能の一部を担うから、本実施形態においては、区別して示す場合を除き、キャッシュメモリもRAM803、メモリ、及び/又は記憶装置に含まれるものとする。
In such processing, since the
また、CPU802は、RAM803から読み出したデータに対して、プログラムの命令列により指定された、本実施形態中に記載した各種の演算、情報の加工、条件判断、情報の検索、置換等を含む各種の処理を行い、RAM803へと書き戻す。例えば、CPU802は、条件判断を行う場合においては、本実施形態において示した各種の変数が、他の変数、又は定数と比較して、大きい、小さい、以上、以下、又は等しい等の条件を満たすかどうかを判断し、条件が成立した場合、又は不成立であった場合に、異なる命令列へと分岐し、又はサブルーチンを呼び出す。
In addition, the
また、CPU802は、記憶装置内のファイル、又はデータベース等に格納された情報を検索することができる。例えば、第1属性の属性値に対し第2属性の属性値がそれぞれ対応付けられた複数のエントリが記憶装置に格納されている場合において、CPU802は、記憶装置に格納されている複数のエントリの中から第1属性の属性値が指定された条件と一致するエントリを検索し、そのエントリに格納されている第2属性の属性値を読み出すことにより、所定の条件を満たす第1属性に対応付けられた第2属性の属性値を得ることができる。
In addition, the
以上に示したプログラム、又はモジュールは、外部の記憶媒体に格納されてもよい。記憶媒体としては、フレキシブルディスク893、CD−ROM892の他に、DVD(Digital Versatile Disk)、又はCD(Compact Disk)等の光学記録媒体、MO(Magneto−Optical disk)等の光磁気記録媒体、テープ媒体、ICカード等の半導体メモリ等を用いることができる。また、専用通信ネットワーク、又はインターネットに接続されたサーバシステムに設けたハードディスク、又はRAM等の記憶媒体を記録媒体として使用して、ネットワークを介してプログラムをコンピュータ800に提供してもよい。
The program or module described above may be stored in an external storage medium. As a storage medium, in addition to a flexible disk 893 and a CD-ROM 892, an optical recording medium such as a DVD (Digital Versatile Disk) or a CD (Compact Disk), a magneto-optical recording medium such as an MO (Magneto-Optical disk), or a tape A medium, a semiconductor memory such as an IC card, or the like can be used. Further, a storage medium such as a hard disk or RAM provided in a server system connected to a dedicated communication network or the Internet may be used as a recording medium, and the program may be provided to the
以上、本発明を実施の形態を用いて説明したが、本発明の技術的範囲は、上記実施の形態に記載の範囲には限定されない。上記実施の形態に、多様な変更、又は改良を加えることが可能であることが当業者に明らかである。そのような変更、又は改良を加えた形態も本発明の技術的範囲に含まれ得ることが、特許請求の範囲の記載から明らかである。 As mentioned above, although this invention was demonstrated using embodiment, the technical scope of this invention is not limited to the range as described in the said embodiment. It will be apparent to those skilled in the art that various changes or improvements can be added to the above-described embodiment. It is apparent from the scope of the claims that the embodiments added with such changes or improvements can also be included in the technical scope of the present invention.
特許請求の範囲、明細書、及び図面中において示したシステム、方法、装置、プログラム、及び記録媒体における動作、手順、ステップ、及び段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現し得ることに留意すべきである。特許請求の範囲、明細書、及び図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。 The execution order of each process such as operations, procedures, steps, and stages in the system, method, apparatus, program, and recording medium shown in the claims, the description, and the drawings is particularly “before”. It should be noted that “preceding” or the like is not specified, and that the output of the previous process can be realized in any order unless it is used in the subsequent process. Regarding the operation flow in the claims, the specification, and the drawings, even if it is described using “first”, “next”, etc. for the sake of convenience, it means that it is essential to carry out in this order. It is not a thing.
100 通過検知システム
110 車載器
111 測位結果データ入力受付部
112 位置特定部
113 マップマッチング部
114 走行状態特定部
115 偶然誤差算出部
116 通過判定部
117 課金処理部
118 データ出力部
119 地図データ格納部
120 系統誤差情報格納部
121 課金ポイント情報格納部
130 GPS受信機
150 ディスプレイ
800 コンピュータ
801 ホストコントローラ
802 CPU
803 RAM
804 グラフィックコントローラ
805 ディスプレイ
806 入出力コントローラ
807 通信インターフェース
808 ハードディスクドライブ
809 CD−ROMドライブ
810 ROM
811 フレキシブルディスクドライブ
812 入出力チップ
891 ネットワーク通信装置
892 CD−ROM
893 フレキシブルディスク
C センターコンソール
D ダッシュボード
I カードスロット
DESCRIPTION OF
803 RAM
804
811 Flexible disk drive 812 I / O chip 891 Network communication device 892 CD-ROM
893 Flexible disk C Center console D Dashboard I Card slot
Claims (12)
電波航法と自律航法とを併用して自位置を測位する測位装置と、
前記車両が前記所定位置を通過した場合に、それを検知する通過検知装置と
を備え、
前記通過検知装置は、
前記測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する位置特定部と、
前記位置特定部が特定した位置をマップマッチングするマップマッチング部と、
前記位置特定部が特定した第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、
前記位置特定部が特定した位置の経時的変化に基づいて、前記車両が前記所定位置を通過したか否かを判定する通過判定部と
を有し、
前記通過判定部は、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する
ことを特徴とする通過検知システム。 A passing detection system that detects when a vehicle passes a predetermined position,
A positioning device that uses both radio navigation and autonomous navigation to position itself;
A passage detecting device for detecting when the vehicle has passed the predetermined position;
The passage detection device is
A position specifying unit that specifies the position of the vehicle by correcting the positioning result by the positioning device based on the system error information prepared in advance regarding the systematic error of the positioning result by the positioning device and the traveling state of the vehicle. When,
A map matching unit for map matching the position specified by the position specifying unit;
A coincidence of calculating a coincidence error of a positioning result by the positioning device based on a deviation amount between a first position specified by the position specifying unit and a second position indicated by a result of map matching performed by the map matching unit. An error calculator,
A passage determining unit that determines whether or not the vehicle has passed the predetermined position based on a change over time of the position specified by the position specifying unit ;
The passage determination unit determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculation unit.
A passage detection system characterized by that .
前記位置特定部が現在までに特定した位置の経時的変化に基づいて、前記車両の走行状態を特定する走行状態特定部
を更に有し、
前記位置特定部は、前記測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記走行状態特定部が特定した前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する
ことを特徴とする請求項1に記載の通過検知システム。 The passage detection device is
A driving state specifying unit for specifying a driving state of the vehicle based on a change with time of the position specified by the position specifying unit until now;
The position specifying unit is configured to obtain a positioning result by the positioning device based on system error information prepared in advance relating to a systematic error of a positioning result by the positioning device and the running state of the vehicle specified by the running state specifying unit. Correct and identify the position of the vehicle
The passage detection system according to claim 1.
前記車両が前記所定位置を通過した場合に、課金処理を行う課金処理部A billing processing unit that performs billing processing when the vehicle passes the predetermined position
を更に有することを特徴とする請求項1又は2に記載の通過検知システム。The passage detection system according to claim 1, further comprising:
電波航法と自律航法とを併用して自位置を測位する測位装置と、
前記車両が前記所定位置を通過した場合に、それを検知する通過検知装置と
を備え、
前記通過検知装置は、
前記測位装置による測位結果をマップマッチングするマップマッチング部と、
前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、
前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部と
を有することを特徴とする通過検知システム。 A passing detection system that detects when a vehicle passes a predetermined position,
A positioning device that uses both radio navigation and autonomous navigation to position itself;
A passage detecting device for detecting when the vehicle has passed the predetermined position;
The passage detection device is
A map matching unit for map matching the positioning result by the positioning device;
A chance to calculate a coincidence error of the positioning result by the positioning device based on the amount of deviation between the first position of the positioning result by the positioning device and the second position indicated by the result of map matching by the map matching unit An error calculator,
If the random error calculating unit is within said predetermined position within the chance was calculated error, passage detecting that the vehicle is characterized by having a said the determining pass determining unit does not pass through the predetermined position system.
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する位置特定段階と、
前記位置特定段階において特定された位置をマップマッチングするマップマッチング段階と、
前記位置特定段階において特定された第1の位置と、前記マップマッチング段階においてマップマッチングされた結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出段階と、
前記位置特定段階において特定された位置の経時的変化に基づいて、前記車両が前記所定位置を通過したか否かを判定する通過判定段階と
を含み、
前記通過判定段階においては、前記偶然誤差算出段階において算出された偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する
ことを特徴とする通過検知方法。 A passing detection method for detecting when a vehicle passes a predetermined position,
Based on the system error information prepared in advance regarding the system error of the positioning result by the positioning device that uses both radio navigation and autonomous navigation to determine the position of the vehicle, the positioning result by the positioning device is obtained based on the running state of the vehicle. A position identifying step for correcting and identifying the position of the vehicle;
A map matching step for map matching the position specified in the position specifying step;
A chance error of the positioning result by the positioning device is calculated based on the amount of deviation between the first position specified in the position specifying step and the second position indicated by the map matching result in the map matching step. Accidental error calculation stage,
A pass determination step of determining whether the vehicle has passed the predetermined position based on a change over time of the position specified in the position specifying step ;
In the passage determination step, if the predetermined position is within the range of the accidental error calculated in the accidental error calculation step, it is determined that the vehicle has not passed the predetermined position.
A passing detection method characterized by that .
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング段階と、
前記測位装置による測位結果の第1の位置と、前記マップマッチング段階においてマップマッチングされた結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出段階と、
前記偶然誤差算出段階において算出された偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定段階と
を含むことを特徴とする通過検知方法。 A passing detection method for detecting when a vehicle passes a predetermined position,
A map matching stage for map-matching positioning results from a positioning device that uses both radio navigation and autonomous navigation to position itself;
A coincidence error of the positioning result by the positioning device is calculated based on a deviation amount between the first position of the positioning result by the positioning device and the second position indicated by the map matching result in the map matching stage. Accidental error calculation stage,
When the predetermined position is within the range of accidental error calculated in the random error calculation step, pass, characterized in that the vehicle comprises a determining passage judgment step and not passed the predetermined position Detection method.
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する位置特定部と、
前記位置特定部が特定した位置をマップマッチングするマップマッチング部と、
前記位置特定部が特定した第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、
前記位置特定部が特定した位置の経時的変化に基づいて、前記車両が前記所定位置を通過したか否かを判定する通過判定部と
を備え、
前記通過判定部は、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する
ことを特徴とする通過検知装置。 A passage detection device that detects when a vehicle has passed a predetermined position,
Based on the system error information prepared in advance regarding the system error of the positioning result by the positioning device that uses both radio navigation and autonomous navigation to determine the position of the vehicle, the positioning result by the positioning device is obtained based on the running state of the vehicle. A position specifying unit for correcting and specifying the position of the vehicle;
A map matching unit for map matching the position specified by the position specifying unit;
A coincidence of calculating a coincidence error of a positioning result by the positioning device based on a deviation amount between a first position specified by the position specifying unit and a second position indicated by a result of map matching performed by the map matching unit. An error calculator,
A passage determining unit that determines whether or not the vehicle has passed the predetermined position based on a change over time of the position specified by the position specifying unit ;
The passage determination unit determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculation unit.
A passage detection device characterized by that .
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部と、
前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部と、
前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部と
を備えることを特徴とする通過検知装置。 A passage detection device that detects when a vehicle has passed a predetermined position,
A map matching unit for map-matching positioning results from a positioning device that uses both radio navigation and autonomous navigation to position itself;
A chance to calculate a coincidence error of the positioning result by the positioning device based on the amount of deviation between the first position of the positioning result by the positioning device and the second position indicated by the result of map matching by the map matching unit An error calculator,
If the random error calculating unit is within said predetermined position within the chance was calculated error, passage detecting that the vehicle is characterized by comprising said and determining passage determining portion does not pass through the predetermined position apparatus.
前記コンピュータを、
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する位置特定部、
前記位置特定部が特定した位置をマップマッチングするマップマッチング部、
前記位置特定部が特定した第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、
前記位置特定部が特定した位置の経時的変化に基づいて、前記車両が前記所定位置を通過したか否かを判定する通過判定部
として機能させ、
前記通過判定部は、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する
ことを特徴とするプログラム。 A program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position,
The computer,
Based on the system error information prepared in advance regarding the system error of the positioning result by the positioning device that uses both radio navigation and autonomous navigation to determine the position of the vehicle, the positioning result by the positioning device is obtained based on the running state of the vehicle. A position specifying unit for correcting and specifying the position of the vehicle;
A map matching unit for map matching the position specified by the position specifying unit;
A coincidence of calculating a coincidence error of a positioning result by the positioning device based on a deviation amount between a first position specified by the position specifying unit and a second position indicated by a result of map matching performed by the map matching unit. Error calculator,
Based on the change over time of the position specified by the position specifying unit, function as a passage determining unit that determines whether the vehicle has passed the predetermined position ,
The passage determination unit determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculation unit.
A program characterized by that .
前記コンピュータを、
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部、
前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、
前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部
として機能させることを特徴とするプログラム。 A program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position,
The computer,
A map matching unit that maps the positioning results of a positioning device that uses both radio navigation and autonomous navigation
A chance to calculate a coincidence error of the positioning result by the positioning device based on the amount of deviation between the first position of the positioning result by the positioning device and the second position indicated by the result of map matching by the map matching unit Error calculator,
A program for causing a vehicle to function as a passage determination unit that determines that the vehicle has not passed through the predetermined position when the predetermined position is within a range of the accidental error calculated by the accidental error calculation unit.
前記コンピュータを、
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果の系統誤差に関する予め用意された系統誤差情報と、前記車両の走行状態とに基づいて、前記測位装置による測位結果を補正して、前記車両の位置を特定する位置特定部、
前記位置特定部が特定した位置をマップマッチングするマップマッチング部、
前記位置特定部が特定した第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、
前記位置特定部が特定した位置の経時的変化に基づいて、前記車両が前記所定位置を通過したか否かを判定する通過判定部
として機能させ、
前記通過判定部は、前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する
ことを特徴とするプログラムを記録した記録媒体。 A recording medium that records a program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position,
The computer,
Based on the system error information prepared in advance regarding the system error of the positioning result by the positioning device that uses both radio navigation and autonomous navigation to determine the position of the vehicle, the positioning result by the positioning device is obtained based on the running state of the vehicle. A position specifying unit for correcting and specifying the position of the vehicle;
A map matching unit for map matching the position specified by the position specifying unit;
A coincidence of calculating a coincidence error of a positioning result by the positioning device based on a deviation amount between a first position specified by the position specifying unit and a second position indicated by a result of map matching performed by the map matching unit. Error calculator,
Based on the change over time of the position specified by the position specifying unit, function as a passage determining unit that determines whether the vehicle has passed the predetermined position ,
The passage determination unit determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculation unit.
The recording medium which recorded the program characterized by the above-mentioned.
前記コンピュータを、
電波航法と自律航法とを併用して自位置を測位する測位装置による測位結果をマップマッチングするマップマッチング部、
前記測位装置による測位結果の第1の位置と、前記マップマッチング部がマップマッチングした結果によって示される第2の位置とのずれ量に基づいて、前記測位装置による測位結果の偶然誤差を算出する偶然誤差算出部、
前記偶然誤差算出部が算出した偶然誤差の範囲内に前記所定位置が入っている場合、前記車両が前記所定位置を通過していないと判定する通過判定部
として機能させることを特徴とするプログラムを記録した記録媒体。 A recording medium that records a program that causes a computer to function as a passage detection device that detects when a vehicle passes a predetermined position,
The computer,
A map matching unit that maps the positioning results of a positioning device that uses both radio navigation and autonomous navigation
A chance to calculate a coincidence error of the positioning result by the positioning device based on the amount of deviation between the first position of the positioning result by the positioning device and the second position indicated by the result of map matching by the map matching unit Error calculator,
A program for causing the vehicle to function as a passage determining unit that determines that the vehicle has not passed the predetermined position when the predetermined position is within the range of the accidental error calculated by the accidental error calculating unit. Recorded recording medium.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013033201A JP6103980B2 (en) | 2013-02-22 | 2013-02-22 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
| PCT/JP2014/053920 WO2014129501A1 (en) | 2013-02-22 | 2014-02-19 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
| SG11201506575SA SG11201506575SA (en) | 2013-02-22 | 2014-02-19 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
| MYPI2015702736A MY172345A (en) | 2013-02-22 | 2014-02-19 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
| SG10201702893QA SG10201702893QA (en) | 2013-02-22 | 2014-02-19 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013033201A JP6103980B2 (en) | 2013-02-22 | 2013-02-22 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014163740A JP2014163740A (en) | 2014-09-08 |
| JP6103980B2 true JP6103980B2 (en) | 2017-03-29 |
Family
ID=51391287
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013033201A Active JP6103980B2 (en) | 2013-02-22 | 2013-02-22 | Passage detection system, passage detection method, passage detection device, program, and recording medium |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6103980B2 (en) |
| MY (1) | MY172345A (en) |
| SG (2) | SG11201506575SA (en) |
| WO (1) | WO2014129501A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5980283B2 (en) * | 2014-09-09 | 2016-08-31 | 三菱重工業株式会社 | Billing system |
| JP6862738B2 (en) * | 2016-09-26 | 2021-04-21 | いすゞ自動車株式会社 | Positioning device |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008281523A (en) * | 2007-05-14 | 2008-11-20 | Navitime Japan Co Ltd | Navigation system, route search server, terminal device, and route search method |
| JP2009036651A (en) * | 2007-08-02 | 2009-02-19 | Panasonic Corp | Navigation device, navigation method, and navigation program |
| JP4420109B2 (en) * | 2007-12-19 | 2010-02-24 | 株式会社デンソー | Car navigation system and program |
| JP5142047B2 (en) * | 2009-02-26 | 2013-02-13 | アイシン・エィ・ダブリュ株式会社 | Navigation device and navigation program |
| JP5538131B2 (en) * | 2010-08-10 | 2014-07-02 | クラリオン株式会社 | Car navigation system |
| JP5545780B2 (en) * | 2012-11-08 | 2014-07-09 | 三菱電機株式会社 | In-vehicle device, vehicle and roadside machine |
-
2013
- 2013-02-22 JP JP2013033201A patent/JP6103980B2/en active Active
-
2014
- 2014-02-19 SG SG11201506575SA patent/SG11201506575SA/en unknown
- 2014-02-19 MY MYPI2015702736A patent/MY172345A/en unknown
- 2014-02-19 WO PCT/JP2014/053920 patent/WO2014129501A1/en not_active Ceased
- 2014-02-19 SG SG10201702893QA patent/SG10201702893QA/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014163740A (en) | 2014-09-08 |
| SG10201702893QA (en) | 2017-06-29 |
| MY172345A (en) | 2019-11-21 |
| SG11201506575SA (en) | 2015-09-29 |
| WO2014129501A1 (en) | 2014-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2584564B2 (en) | Vehicle position detection device | |
| EP2519803B1 (en) | Technique for calibrating dead reckoning positioning data | |
| JP5314502B2 (en) | Vehicle position measuring device and vehicle position measuring method | |
| CN111856521B (en) | Data processing method, device, electronic equipment and storage medium | |
| CN103033184A (en) | Error correction method, device and system for inertial navigation system | |
| CN111949030B (en) | Agricultural machinery positioning method, agricultural machinery vehicle and storage medium | |
| CN205940567U (en) | On -vehicle combination navigational positioning system | |
| WO2013179852A1 (en) | Vehicle position detection device and program | |
| CN100430730C (en) | Method and device for measuring speed of road vehicles | |
| JP6103980B2 (en) | Passage detection system, passage detection method, passage detection device, program, and recording medium | |
| CN115615430B (en) | Positioning data correction method and system based on strapdown inertial navigation | |
| JP4835413B2 (en) | Vehicle navigation device | |
| JP5919615B2 (en) | Travel route identification system, travel route identification method, travel route identification device, program, and recording medium | |
| JP5270849B2 (en) | Vehicle position calculation method and vehicle position calculation device | |
| CN110244338A (en) | A kind of transmission method and system, storage medium and car-mounted terminal of location data | |
| CN109710594B (en) | Map data validity judging method and device and readable storage medium | |
| CN110411463A (en) | On-vehicle navigation apparatus receives the emergency navigational system and method under star failure state | |
| WO2014069287A1 (en) | Billing processing system, billing processing method, billing processing device, program, and recording medium | |
| JP2023143227A (en) | road monitoring system | |
| JP2009115485A (en) | Navigation device, method, and program | |
| CN106940191A (en) | Guider and its vehicle location display methods | |
| CN117633135A (en) | High-precision map vector data processing method, device and storage medium | |
| CN118759930A (en) | Vehicle control method, device, equipment, storage medium and vehicle | |
| CN121075105A (en) | Running state detection method, device and equipment | |
| CN119826816A (en) | Vehicle positioning track calibration method, device, server and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160210 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20160323 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20161220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170214 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170228 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6103980 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |