JP5937706B1 - ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム - Google Patents
ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム Download PDFInfo
- Publication number
- JP5937706B1 JP5937706B1 JP2015009852A JP2015009852A JP5937706B1 JP 5937706 B1 JP5937706 B1 JP 5937706B1 JP 2015009852 A JP2015009852 A JP 2015009852A JP 2015009852 A JP2015009852 A JP 2015009852A JP 5937706 B1 JP5937706 B1 JP 5937706B1
- Authority
- JP
- Japan
- Prior art keywords
- robot
- contact
- external force
- cpu
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
- B25J9/1676—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37411—Measure contact from force and velocity detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/42—Servomotor, servo controller kind till VSS
- G05B2219/42288—Limit, stop drive current if axis obstructed, blocked, force against stop
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/49—Nc machine tool, till multiple
- G05B2219/49147—Retract on collision with moving object, tool follows, yields to object
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50198—Emergency stop
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Abstract
【課題】従来、ロボットに不要な退避動作をさせてしまう場合があった。【解決手段】ロボット制御装置50は、センサ30によって検出された外力に基づいて、ロボット12が物体と接触したか否かを判断する接触判断部58と、ロボット12が物体と接触したと判断されたときに、ロボット12を停止させる停止指令部60と、ロボット12を停止させた後に該ロボット12が物体と継続して接触しているか否かを判断する接触継続判断部62と、ロボット12が物体と継続して接触していると判断されたときに、ロボット12を物体から離れる方向へ退避させる退避指令部64とを備える。【選択図】図2
Description
本発明は、ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステムに関する。
ロボットの作業中に該ロボットと物体とが接触したことを検出したときに、該ロボットに退避動作を実行させるロボット制御装置が知られている(例えば、特許文献1〜3)。
物体がロボットと瞬間的に接触し、ロボットと物体との接触が即時に解消された場合は、ロボットを退避させずに、作業を継続させてもよい場合がある。しかしながら、上述した従来技術においては、ロボット制御装置は、ロボットと物体とが接触したことを検出したときに、即時、ロボットに退避動作を実行させるものである。したがって、ロボットに不要な退避動作をさせてしまう場合があった。
本発明の一態様において、ロボットに加わる外力を検出するセンサの出力に基づいてロボットの動作を制御するロボット制御装置は、センサによって検出された外力に基づいて、ロボットが物体と接触したか否かを判断する接触判断部と、接触判断部によってロボットが物体と接触したと判断されたときに、ロボットを停止させる停止指令部とを備える。
また、ロボット制御装置は、ロボットを停止させた後に該ロボットが物体と継続して接触しているか否かを判断する接触継続判断部と、接触継続判断部によってロボットが物体と継続して接触していると判断されたときに、ロボットを物体から離れる方向へ退避させる退避指令部とを備える。
接触判断部は、予め定められた閾値以上の外力が検出された場合に、ロボットが物体と接触したと判断してもよい。接触継続判断部は、停止指令部によってロボットを停止させた時点から予め定められた時間が経過するまでに、予め定められた閾値を超えた外力が検出された場合に、ロボットが物体と継続して接触していると判断してもよい。
ロボット制御装置は、停止指令部によってロボットを停止させた時点からの外力の積算値を算出する積算値算出部をさらに備え、接触継続判断部は、時点から予め定められた時間が経過するまでに、積算値が予め定められた閾値を超えた場合に、ロボットが物体と継続して接触していると判断してもよい。
本発明の他の態様において、ロボットシステムは、ロボットと、ロボットを制御する上述のロボット制御装置とを備える。
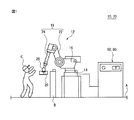
以下、本発明の実施の形態を図面に基づいて詳細に説明する。まず、図1および図2を参照して、本発明の一実施形態に係るロボットシステム10について説明する。ロボットシステム10は、ロボット12と、該ロボット12を制御するロボット制御装置50とを備える。
ロボット12は、例えば垂直多関節ロボットであって、ロボットベース14、旋回胴16、ロボットアーム18、およびロボットハンド20を備える。ロボットベース14は、ワークセルの床Aに固定されている。旋回胴16は、ロボットベース14に鉛直軸周りに旋回可能に取り付けられている。
ロボットアーム18は、旋回胴16に回転可能に取り付けられた下腕部22と、該下腕部22の先端に回転可能に取り付けられた前腕部24とを有する。ロボットハンド20は、手首部26を介して、前腕部24の先端に取り付けられている。ロボットハンド20は、例えばワーク(図示せず)の把持および解放といった種々の作業をワークに対して行うことができる。
図2に示すように、ロボット12は、サーボモータ28および力センサ30を有する。サーボモータ28は、旋回胴16、ロボットアーム18、および手首部26にそれぞれ内蔵され、ロボット制御装置50からの指令に応じて、これら要素を回動軸周りに回動させる。
力センサ30は、旋回胴16、ロボットアーム18、または手首部26に内蔵されており、ロボット12に加えられている外力を検出することができる。一例として、力センサ30は、歪ゲージを含み、力センサ30が設置されている位置における要素の歪み値を計測する。
ロボット制御装置50は、CPU(中央演算処理装置)52、計時部54、および記憶部56を備える。計時部54および記憶部56は、バスを介して、CPU52に接続されている。計時部54は、CPU52からの指令に応じて、予め定められた時点からの時間を計測する。CPU52は、計時部54によって計測された時間を、記憶部56に記録する。
記憶部56は、例えばEEPROM(登録商標)等のような、電気的に消去・記録可能な不揮発性メモリ、または、例えばDRAM、SRAM等のような、高速で読み書きのできるランダムアクセスメモリによって構成される。
本実施形態においては、CPU52は、接触判断部58、停止指令部60、接触継続判断部62、および退避指令部64としての機能を担う。なお、接触判断部58、停止指令部60、接触継続判断部62、退避指令部64の機能については、後述する。
次に、図1〜図3を参照して、ロボットシステム10の動作について説明する。ロボット制御装置50は、ロボット12に内蔵されたサーボモータ28に指令を送り、ロボット12を動作させる。ロボット12の動作中において、ロボット12が、部材B(図1)や作業員C(図1)等といった、ロボット12の外部の物体と接触してしまう場合がある。
図3は、ロボット12の動作中にロボット12と物体とが接触した場合における、ロボット12の制御方法の一例を示すフローチャートである。ステップS1において、CPU52は、力センサ30から、ロボット12に加わる外力に関する情報を、予め定められた周期Tで取得する。
一例として、力センサ30が歪みゲージを含む場合、CPU52は、力センサ30から予め定められた周期Tで歪み値を取得し、該歪み値に基づいて、ロボット12に加わる外力を算出する。CPU52は、取得した外力を、記憶部56に記憶する。
ステップS2において、CPU52は、ステップS1にて取得した直近の外力が、予め定められた第1の閾値以上となったか否かを判断する。この第1の閾値は、記憶部56に予め記憶されている。
CPU52は、記憶部56から、第1の閾値と、ステップS1にて周期的に記憶されている外力のうち直近のものとを読み出して、これらを比較する。CPU52は、外力が第1の閾値以上である(すなわちYES)と判断した場合、ステップS3へ進む。一方、CPU52は、外力が第1の閾値よりも小さい(すなわちNO)と判断した場合、ステップS8へ進む。
このように、CPU52は、力センサ30によって検出された外力と第1の閾値とを比較し、該外力が第1の閾値以上になったときに、ロボット12が物体(例えば部材Bまたは作業員C)と接触したと判断する。したがって、CPU52は、力センサ30によって検出された外力に基づいて、ロボット12が物体と接触したか否かを判断する接触判断部58(図2)としての機能を担う。
ステップS3において、CPU52は、サーボモータ28に指令を送り、ロボット12の動作を停止させる。このように、本実施形態においては、CPU52は、接触判断部58によってロボット12が物体と接触したと判断されたときにロボット12を停止させる停止指令部(図2)としての機能を担う。
ステップS4において、CPU52は、計時部54に指令を送り、経過時間の計時を開始する。一例として、ステップS4にて計時を開始する時点tSは、例えば、ステップS3にてロボット12を停止させた時点t1に設定される。また、他の例として、計時部54は、標準時間(例えば日本標準時間)を計時し、CPU52は、時点tSにおける標準時間を記憶部56に記憶してもよい。
ステップS5において、CPU52は、ステップS4にて計時している経過時間が、予め定められた時間t3(例えば5秒)となったか否かを判断する。この時間t3は、記憶部56に予め記憶されている。
なお、計時部54が上記標準時間を計時している場合、CPU52は、ステップS4にて記憶した時点tSにおける標準時間から、予め定められた時間t3を経過したか否かを判断する。
CPU52は、予め定められた時間t3を経過していない(すなわちNO)と判断した場合、ステップS6へ進む。一方、CPU52は、予め定められた時間t3を経過した(すなわちYES)と判断した場合、ステップS8へ進む。
ステップS6において、CPU52は、ステップS1にて周期的に取得している外力のうち直近のものが、予め定められた第2の閾値を超えたか否かを判断する。第2の閾値は、記憶部56に予め記憶されている。
CPU52は、記憶部56から、第2の閾値と、ステップS1にて周期的に記憶された外力のうち直近のものとを読み出して、これらを比較する。CPU52は、外力が第2の閾値を超えた(すなわちYES)と判断したときに、ステップS7へ進む。一方、CPU52は、外力が第2の閾値を超えていない(すなわちNO)と判断したとき、ステップS5へ戻る。
このように、本実施形態においては、CPU52は、時点t1から時間t3が経過するまでに第2の閾値を超えた外力が検出された場合に、ロボット12の停止後もロボット12と物体(例えば部材Bまたは作業員C)とが継続して接触しているものと判断する。したがって、CPU52は、ロボット12が物体と継続して接触しているか否かを判断する接触継続判断部62(図2)としての機能を担う。
ステップS7において、CPU52は、サーボモータ28に指令を送り、ロボット12を物体から退避させる。一例として、ロボットアーム18が物体に接触した場合において、CPU52は、ロボットアーム18に内蔵された力センサ30からの外力の情報(例えば歪み値)に基づいて、物体がロボットアーム18に対して当接した方向D1を算出する。
そして、CPU52は、ロボットアーム18に内蔵されたサーボモータ28に指令を送り、ロボットアーム18を方向D1へ移動させる。これにより、CPU52は、ロボットアーム18を物体から離れるように退避させる。
また、他の例として、CPU52は、ロボットアーム18の位置指令値を記憶部56に順次記憶していく。そして、ロボットアーム18が物体に接触したときに、CPU52は、ステップS2でYESと判断した時点から直近に記憶された位置指令値から、時系列を遡って位置指令値を順次読み出す。
そして、CPU52は、順次読み出された位置指令に対応する位置にロボットアーム18を順次移動させる。これにより、CPU52は、ロボットアーム18を、物体と衝突する前の経路を辿るようにして、該物体から退避させることができる。
ステップS8において、CPU52は、ユーザまたは上位コントローラから、ロボット12の作業指令を受け付けたか否かを判断する。CPU52は、ロボット12の作業指令を受け付けた(すなわちYES)と判断した場合、ステップS9へ進む。一方、CPU52は、ロボット12の作業指令を受け付けていない(すなわちNO)と判断した場合、図3に示すフローを終了する。
ステップS9において、CPU52は、サーボモータ28に指令を送り、例えば、ロボットハンド20によってワークを把持し、該ワークを運搬するといった作業を実行する。そして、CPU52は、ステップS8にてNOと判断するまで、ステップS1〜S9をループする。
上述したように、本実施形態においては、CPU52は、ロボット12を停止させた後に、ロボット12と物体(例えば部材Bまたは作業員C)とが継続して接触していると判断した場合にのみ、ロボット12の退避動作を実行している。
この構成によれば、物体がロボット12と瞬間的に接触しただけでロボット12を退避させてしまうのを防止することができる。したがって、ロボット12の無駄な退避動作を省略できるので、ロボット12による作業効率を向上させることができる。
また、本実施形態によれば、近年需要が高まっている人協調型ロボットに適用した場合に、以下に述べる利点をもたらすことになる。この利点について、図1を用いて説明する。
作業員Cとロボット12が、協働で作業を行う場合において、作業員Cが動作中のロボット12を所望の位置で停止させ、次いで作業員Cがワークに所定の作業を行い、作業員Cの作業終了後に、ロボット12によるワークの搬送等の作業を行いたい場合がある。
このような場合において、本実施形態において、作業員Cは、動作中のロボット12(例えば、ロボットアーム18またはロボットハンド20)を手で叩き、ロボット12に瞬間的な外力を与える。そうすると、CPU52は、上述のステップS2にて、ロボット12に第1の閾値以上の外力が加えられたと判断し、ステップS3にて、ロボット12を停止させる。
一方、作業員Cからロボット12に加えられた外力は、瞬間的(すなわちインパルス)であるので、ロボット12の停止後には、外力は検出されない。したがって、ステップS7のロボット退避動作は、実行されない。
これにより、作業員Cは、ロボット12を叩くだけで、該ロボット12を所望の位置で停止させることができる。この構成により、作業員Cは、ロボット12との協働作業を円滑に行うことができる。
次に、図1および図4を参照して、本発明の他の実施形態に係るロボットシステム70について説明する。なお、上述の実施形態と同様の要素には同じ符号を付し、詳細な説明を省略する。
ロボットシステム70は、ロボット12と、該ロボット12を制御するロボット制御装置80とを備える。ロボット制御装置80は、CPU82、計時部54、および記憶部56を備える。
CPU82は、接触判断部58、停止指令部60、接触継続判断部84、退避指令部64、および積算値算出部86としての機能を担う。なお、接触継続判断部84および積算値算出部86の機能については、後述する。
次に、図1、図4、および図5を参照して、ロボット12の動作中にロボット12と物体とが接触した場合における、ロボット制御装置80によるロボット12の制御方法について説明する。
なお、図5に示すフローにおいて、図3に示すフローと同様のステップには同じ符号を付し、詳細な説明を省略する。ステップS11において、CPU82は、ステップS1にて周期的に取得している外力の積算値の算出を開始する。
具体的には、CPU82は、ステップS3にてロボット12を停止させた時点t1以降に力センサ30から周期Tで取得する外力を積算し、算出した外力の積算値を記憶部56へ記憶する。例えば、ステップS11の開始後、力センサ30から第n周期目(すなわち、nT)に取得した外力をfnとすると、外力の積算値Σfは、以下の式に従って算出される。

このように、本実施形態において、CPU82は、ステップS3にてロボット12を停止させた時点t1から、力センサ30から取得する外力の積算値Σfを算出する。したがって、CPU82は、時点t1からの外力の積算値Σfを算出する積算値算出部86(図4)としての機能を担う。
ステップS12において、CPU82は、ステップS11にて算出している積算値が、予め定められた第3の閾値を超えたか否かを判断する。第3の閾値は、記憶部56に予め記憶されている。
CPU82は、記憶部56から、第3の閾値と、直近に記憶された積算値Σfとを比較する。CPU82は、積算値Σfが第3の閾値を超えた(すなわちYES)と判断したときに、ステップS7へ進む。一方、CPU82は、積算値Σfが第3の閾値を超えていない(すなわちNO)と判断した場合、ステップS5へ戻る。
このように、本実施形態においては、CPU82は、時点t1から時間t3が経過するまでに積算値Σfが第3の閾値を超えた場合に、ロボット12の停止後もロボット12と物体(例えば部材Bまたは作業員C)とが継続して接触しているものと判断する。したがって、CPU82は、ロボット12が物体と継続して接触しているか否かを判断する接触継続判断部84(図4)としての機能を担う。
本実施形態によれば、CPU82は、ロボット12を停止させた後に、ロボット12と物体(例えば部材Bまたは作業員C)とが継続して接触していると判断した場合にのみ、ロボット12の退避動作を実行している。この構成によれば、ロボット12の無駄な退避動作を省略できるので、ロボット12による作業効率を向上させることができる。
また、本実施形態によれば、作業員Cは、ロボット12を叩くだけで、該ロボット12を所望の位置で停止させることができる。したがって、作業員Cは、ロボット12との協働作業を円滑に行うことができる。
なお、図5のステップS11において、CPU82は、外力の積算値Σfの代わりに、外力の平均値を算出する平均値算出部としての機能を有してもよい。具体的には、CPU82は、外力の平均値fAVEを以下の式に従って算出できる。
また、図5のステップS11において、CPU82は、外力の積算値Σfの代わりに、外力の標準偏差を算出する標準偏差算出部としての機能を有してもよい。具体的には、CPU82は、外力の標準偏差fSDを以下の式に従って算出できる。
この場合、記憶部56は、fAVEまたはfSDに対応する閾値を予め記憶する。そして、ステップS12において、CPU82は、算出された直近のfAVEまたはfSDと、対応する閾値とを比較する。そして、CPU82は、fAVEまたはfSDが対応する閾値を超えたと判断した場合に、ロボット12の停止後もロボット12と物体(例えば部材Bまたは作業員C)とが継続して接触しているものと判断してもよい。
なお、上述の実施形態においては、計時部54および記憶部56が、ロボット制御装置50、80に組み込まれている場合について述べた。しかしながら、これに限らず、計時部54および記憶部56は、ロボット制御装置50、80の外部機器として設けられてもよい。
例えば、外部機器としての記憶部を、ネットワークを介してロボット制御装置に接続し、ロボット制御装置は、取得した外力や積算値といったデータを、ネットワークを介して記憶部に送信し、該記憶部に記憶させてもよい。
また、上述の実施形態においては、力センサ30が歪みゲージを含む場合について述べた。しかしながら、これに限らず、力センサ30は、レーザ変位計、近接センサ、オプトセンサ、または静電容量式変位計等を含んでもよい。CPU52、82は、これらセンサからの出力値に基づいて、ロボット12に加わる外力の大きさ、および方向を算出できる。
以上、発明の実施形態を通じて本発明を説明したが、上述の実施形態は、特許請求の範囲に係る発明を限定するものではない。また、本発明の実施形態の中で説明されている特徴を組み合わせた形態も本発明の技術的範囲に含まれ得るが、これら特徴の組み合わせの全てが、発明の解決手段に必須であるとは限らない。さらに、上述の実施形態に、多様な変更または改良を加えることが可能であることも当業者に明らかである。
また、特許請求の範囲、明細書、および図面中において示した装置、システム、プログラム、および方法における動作、手順、ステップ、工程、および段階等の各処理の実行順序は、特段「より前に」、「先立って」等と明示しておらず、また、前の処理の出力を後の処理で用いるのでない限り、任意の順序で実現しうることに留意すべきである。特許請求の範囲、明細書、および図面中の動作フローに関して、便宜上「まず、」、「次に、」等を用いて説明したとしても、この順で実施することが必須であることを意味するものではない。
10,70 ロボットシステム
12 ロボット
30 力センサ
50,80 ロボット制御装置
58 接触判断部
60 停止指令部
62,84 接触継続判断部
64 退避指令部
86 積算値算出部
12 ロボット
30 力センサ
50,80 ロボット制御装置
58 接触判断部
60 停止指令部
62,84 接触継続判断部
64 退避指令部
86 積算値算出部
Claims (5)
- ロボットに加わる外力を検出するセンサの出力に基づいて前記ロボットの動作を制御するロボット制御装置であって、
前記センサによって検出された前記外力に基づいて、前記ロボットが物体と接触したか否かを判断する接触判断部と、
前記接触判断部によって前記ロボットが前記物体と接触したと判断されたときに、前記ロボットを停止させる停止指令部と、
前記ロボットを停止させた後に該ロボットが前記物体と継続して接触しているか否かを判断する接触継続判断部と、
前記接触継続判断部によって前記ロボットが前記物体と継続して接触していると判断されたときに、前記ロボットを前記物体から離れる方向へ退避させる退避指令部と、を備える、ロボット制御装置。 - 前記接触判断部は、予め定められた閾値以上の前記外力が検出された場合に、前記ロボットが前記物体と接触したと判断する、請求項1に記載のロボット制御装置。
- 前記接触継続判断部は、前記停止指令部によって前記ロボットを停止させた時点から予め定められた時間が経過するまでに、予め定められた閾値を超えた前記外力が検出された場合に、前記ロボットが前記物体と継続して接触していると判断する、請求項1または2に記載のロボット制御装置。
- 前記停止指令部によって前記ロボットを停止させた時点からの前記外力の積算値を算出する積算値算出部をさらに備え、
前記接触継続判断部は、前記時点から予め定められた時間が経過するまでに、前記積算値が予め定められた閾値を超えた場合に、前記ロボットが前記物体と継続して接触していると判断する、請求項1または2に記載のロボット制御装置。 - ロボットと、
前記ロボットを制御する、請求項1〜4のいずれか1項に記載のロボット制御装置と、を備える、ロボットシステム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015009852A JP5937706B1 (ja) | 2015-01-21 | 2015-01-21 | ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム |
| CN201510958584.8A CN105798907B (zh) | 2015-01-21 | 2015-12-18 | 机器人控制装置以及机器人系统 |
| DE102016000352.9A DE102016000352B4 (de) | 2015-01-21 | 2016-01-14 | Robotersteuervorrichtung, die den roboter basierend auf einer auf den roboter ausgeübten externen kraft steuert, sowie robotersystem |
| US15/000,714 US9737991B2 (en) | 2015-01-21 | 2016-01-19 | Robot control device controlling robot based on external force applied to robot and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015009852A JP5937706B1 (ja) | 2015-01-21 | 2015-01-21 | ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5937706B1 true JP5937706B1 (ja) | 2016-06-22 |
| JP2016132080A JP2016132080A (ja) | 2016-07-25 |
Family
ID=56184690
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015009852A Active JP5937706B1 (ja) | 2015-01-21 | 2015-01-21 | ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9737991B2 (ja) |
| JP (1) | JP5937706B1 (ja) |
| CN (1) | CN105798907B (ja) |
| DE (1) | DE102016000352B4 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5926346B2 (ja) * | 2014-09-25 | 2016-05-25 | ファナック株式会社 | 人間協調ロボットシステム |
| JP6034900B2 (ja) * | 2015-03-06 | 2016-11-30 | ファナック株式会社 | 動作プログラムの再開を判断するロボット制御装置 |
| JP6733239B2 (ja) * | 2016-03-18 | 2020-07-29 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| CN107717982B (zh) * | 2016-08-12 | 2020-09-25 | 财团法人工业技术研究院 | 机械手臂的控制装置及操作方法 |
| CN107717981B (zh) * | 2016-08-12 | 2021-01-05 | 财团法人工业技术研究院 | 机械手臂的控制装置及其教导系统与方法 |
| JP6316909B1 (ja) * | 2016-11-10 | 2018-04-25 | ファナック株式会社 | 協働動作領域を有するロボットシステム |
| JP6457560B2 (ja) * | 2017-01-06 | 2019-01-23 | ファナック株式会社 | 回転軸関節構造 |
| WO2018152141A1 (en) | 2017-02-15 | 2018-08-23 | Covidien Lp | System and apparatus for crush prevention for medical robot applications |
| TWI774666B (zh) * | 2017-03-17 | 2022-08-21 | 達明機器人股份有限公司 | 協作型機器手臂的防夾方法 |
| DE102017108618B4 (de) * | 2017-04-21 | 2021-08-05 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum Betätigen eines Roboters |
| JP6939104B2 (ja) * | 2017-06-09 | 2021-09-22 | セイコーエプソン株式会社 | 制御装置、ロボットシステムおよびロボット制御方法 |
| ES2760947T3 (es) * | 2017-06-23 | 2020-05-18 | Comau Spa | Conjunto funcional para una máquina industrial, en concreto para un robot, que incluye una unidad funcional equipada con una cubierta de seguridad |
| JP6619395B2 (ja) * | 2017-07-12 | 2019-12-11 | ファナック株式会社 | ロボットシステムおよびロボットの教示方法 |
| JP2019018280A (ja) * | 2017-07-14 | 2019-02-07 | Thk株式会社 | 把持システム |
| KR102370879B1 (ko) * | 2017-09-12 | 2022-03-07 | 주식회사 한화 | 협동로봇제어장치 및 협동로봇을 제어하는 방법 |
| JP6690626B2 (ja) * | 2017-10-31 | 2020-04-28 | 株式会社安川電機 | ロボットシステムおよびロボットの退避方法 |
| JP2019098421A (ja) * | 2017-11-28 | 2019-06-24 | シャープ株式会社 | 電子機器、制御装置および制御プログラム |
| JP7079435B2 (ja) * | 2018-05-21 | 2022-06-02 | Telexistence株式会社 | ロボット制御装置、ロボット制御方法及びロボット制御プログラム |
| JP7167547B2 (ja) * | 2018-08-22 | 2022-11-09 | セイコーエプソン株式会社 | 制御装置、及び、ロボットシステム |
| JP6935381B2 (ja) * | 2018-10-26 | 2021-09-15 | 株式会社Screen Spe サービス | 緊急停止用機器 |
| JP7211007B2 (ja) * | 2018-10-30 | 2023-01-24 | セイコーエプソン株式会社 | 制御装置、ロボットシステムおよび制御方法 |
| JP2020189367A (ja) * | 2019-05-22 | 2020-11-26 | セイコーエプソン株式会社 | ロボットシステム |
| EP3976322B1 (en) * | 2019-05-29 | 2024-12-04 | Universal Robots A/S | Detection of change in contact between robot arm and an object |
| US11638616B2 (en) * | 2019-09-18 | 2023-05-02 | Depuy Ireland Unlimited Company | System and method for controlling a robot arm |
| WO2021182356A1 (ja) * | 2020-03-12 | 2021-09-16 | ファナック株式会社 | ロボットの制御装置、ロボットシステム、ロボット制御方法 |
| JP7171879B2 (ja) * | 2021-02-10 | 2022-11-15 | キヤノン株式会社 | システム、製造方法、制御方法、プログラム及び記録媒体 |
| EP4074473A1 (en) * | 2021-02-10 | 2022-10-19 | Canon Kabushiki Kaisha | System, manufacturing method, controlling method, program, and recording medium |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6238780A (ja) * | 1985-08-12 | 1987-02-19 | Aichi Mach Ind Co Ltd | スポツト溶接ロボツトにおける溶着検知方法 |
| JP2003025272A (ja) * | 2001-05-08 | 2003-01-29 | Mitsubishi Electric Corp | ロボット制御装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5304906A (en) * | 1989-12-26 | 1994-04-19 | Fanuc Ltd. | Collision detecting method using an observer |
| JP2608161B2 (ja) * | 1990-03-29 | 1997-05-07 | ファナック株式会社 | 産業用ロボットの停止制御方法 |
| JP3367641B2 (ja) | 1998-07-31 | 2003-01-14 | 株式会社安川電機 | ロボットの制御装置 |
| JP3212571B2 (ja) * | 1999-03-26 | 2001-09-25 | ファナック株式会社 | 産業用ロボット |
| JP3459973B2 (ja) | 1999-10-22 | 2003-10-27 | 川崎重工業株式会社 | 駆動制御方法および駆動制御装置 |
| DE10162412A1 (de) * | 2001-12-19 | 2003-07-10 | Kuka Roboter Gmbh | Einrichtung und Verfahren zum Sichern von Vorrichtungen mit frei im Raum beweglichen Teilen |
| DE10226853B3 (de) * | 2002-06-15 | 2004-02-19 | Kuka Roboter Gmbh | Verfahren zum Begrenzen der Krafteinwirkung eines Roboterteils |
| DE102005015317B4 (de) * | 2005-04-01 | 2007-02-01 | Siemens Ag | Verfahren und Steuereinrichtung zur gezielten Reaktion bei einem Kontakt zwischen einem Maschinenelement einer Maschine mit einem Gegenstand |
| JP2008142829A (ja) * | 2006-12-11 | 2008-06-26 | National Institute Of Advanced Industrial & Technology | 日常生活支援マニピュレータ装置 |
| JP2008188722A (ja) * | 2007-02-06 | 2008-08-21 | Fanuc Ltd | ロボット制御装置 |
| JP4374039B2 (ja) * | 2007-06-14 | 2009-12-02 | ファナック株式会社 | スポット溶接システム及び溶接ガン閉速度調整方法 |
| DE102008024950A1 (de) | 2008-05-23 | 2009-11-26 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zur Steuerung eines Manipulators |
| JP5375062B2 (ja) * | 2008-12-10 | 2013-12-25 | 株式会社安川電機 | ロボットシステムおよび制御方法 |
| WO2010108518A1 (en) * | 2009-03-27 | 2010-09-30 | Abb Ag | Intrinsically safe small robot and method for controlling this robot |
| JP5311294B2 (ja) * | 2010-04-28 | 2013-10-09 | 株式会社安川電機 | ロボットの接触位置検出装置 |
| US8573070B2 (en) * | 2011-02-22 | 2013-11-05 | The Boeing Company | Force and normality sensing for end effector clamp |
| JP5912953B2 (ja) | 2012-07-17 | 2016-04-27 | 株式会社ダイヘン | 制御装置、及び制御方法 |
| JP6164948B2 (ja) * | 2013-06-20 | 2017-07-19 | キヤノン株式会社 | ロボット装置及び部品の製造方法 |
-
2015
- 2015-01-21 JP JP2015009852A patent/JP5937706B1/ja active Active
- 2015-12-18 CN CN201510958584.8A patent/CN105798907B/zh active Active
-
2016
- 2016-01-14 DE DE102016000352.9A patent/DE102016000352B4/de active Active
- 2016-01-19 US US15/000,714 patent/US9737991B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6238780A (ja) * | 1985-08-12 | 1987-02-19 | Aichi Mach Ind Co Ltd | スポツト溶接ロボツトにおける溶着検知方法 |
| JP2003025272A (ja) * | 2001-05-08 | 2003-01-29 | Mitsubishi Electric Corp | ロボット制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016132080A (ja) | 2016-07-25 |
| DE102016000352A1 (de) | 2016-07-21 |
| CN105798907A (zh) | 2016-07-27 |
| US9737991B2 (en) | 2017-08-22 |
| DE102016000352B4 (de) | 2022-01-13 |
| CN105798907B (zh) | 2017-11-17 |
| US20160207197A1 (en) | 2016-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5937706B1 (ja) | ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム | |
| CN107263435B (zh) | 人协动型的机器人系统 | |
| EP2261595B1 (en) | Circularity measuring apparatus | |
| JP5238885B2 (ja) | ロボット制御装置 | |
| JP2016007645A (ja) | アームの退避機能を有する多関節ロボット | |
| JP7136729B2 (ja) | ロボットを用いて負荷の重量及び重心位置を推定するための装置、方法、プログラム、制御装置及びロボットシステム | |
| JP2017087313A (ja) | ロボット装置 | |
| CN109719702B (zh) | 机器人系统、机器人控制器以及机器人的退避方法 | |
| CN105444651A (zh) | 圆度测量装置及其控制方法 | |
| KR20170083037A (ko) | 로봇 매니퓰레이터의 개방-루프/폐쇄-루프 제어를 위한 방법 및 장치 | |
| WO2020027118A1 (ja) | ロボット制御装置、ロボット制御方法及びロボット制御プログラム | |
| JP2005327191A (ja) | サーボ制御装置 | |
| JP2019209407A (ja) | ロボット、制御装置およびロボットの制御方法 | |
| JP2008208701A (ja) | ブラインド等に対する風の影響を判定する方法、検出装置、及び、ブラインド等を保護する装置 | |
| CN112088073B (zh) | 关节型机器人及其气体弹簧的气体减少状态的推断方法 | |
| JP7089460B2 (ja) | ガス圧検知装置、ガス圧検知装置を備えるロボット及びそのガス圧検知方法 | |
| JP2008032475A (ja) | 表面形状測定装置及び触針荷重の異常検出方法 | |
| WO2017141569A1 (ja) | 制御装置、制御システム、制御方法およびプログラム | |
| JP2015016527A5 (ja) | ||
| WO2017070872A1 (zh) | 一种用于异常检测的方法和装置 | |
| PL239029B1 (pl) | Sposób zgrzewania tarciowego i urządzenie do zgrzewania tarciowego | |
| JP6382918B2 (ja) | 成形機および成形品取出し装置を備える成形システム | |
| CN113043328A (zh) | 平衡器的异常检测系统和平衡器的异常检测方法 | |
| JP5787579B2 (ja) | 把持装置 | |
| CN115771122A (zh) | 一种安全控制方法、智能设备及计算机可读介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20160414 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160419 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160512 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5937706 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |