JP5741673B2 - 同期電動機の回転子位相推定装置 - Google Patents
同期電動機の回転子位相推定装置 Download PDFInfo
- Publication number
- JP5741673B2 JP5741673B2 JP2013248366A JP2013248366A JP5741673B2 JP 5741673 B2 JP5741673 B2 JP 5741673B2 JP 2013248366 A JP2013248366 A JP 2013248366A JP 2013248366 A JP2013248366 A JP 2013248366A JP 5741673 B2 JP5741673 B2 JP 5741673B2
- Authority
- JP
- Japan
- Prior art keywords
- frequency
- phase
- signal
- rotor
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000001360 synchronised effect Effects 0.000 title claims description 27
- 230000004044 response Effects 0.000 claims description 31
- 239000013598 vector Substances 0.000 claims description 30
- 238000012545 processing Methods 0.000 claims description 29
- 238000000034 method Methods 0.000 description 80
- 230000000694 effects Effects 0.000 description 31
- 238000012892 rational function Methods 0.000 description 20
- 238000013461 design Methods 0.000 description 14
- 230000009467 reduction Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 10
- 230000014509 gene expression Effects 0.000 description 9
- 238000012546 transfer Methods 0.000 description 8
- 238000002474 experimental method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 238000012360 testing method Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000000368 destabilizing effect Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 230000006641 stabilisation Effects 0.000 description 2
- 238000011105 stabilization Methods 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- UXUFTKZYJYGMGO-CMCWBKRRSA-N (2s,3s,4r,5r)-5-[6-amino-2-[2-[4-[3-(2-aminoethylamino)-3-oxopropyl]phenyl]ethylamino]purin-9-yl]-n-ethyl-3,4-dihydroxyoxolane-2-carboxamide Chemical compound O[C@@H]1[C@H](O)[C@@H](C(=O)NCC)O[C@H]1N1C2=NC(NCCC=3C=CC(CCC(=O)NCCN)=CC=3)=NC(N)=C2N=C1 UXUFTKZYJYGMGO-CMCWBKRRSA-N 0.000 description 1
- 102100032352 Leukemia inhibitory factor Human genes 0.000 description 1
- 108090000581 Leukemia inhibitory factor Proteins 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images










Landscapes
- Control Of Ac Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description

また、一定真円形高周波電圧印加法による正弦形状高周波電圧は次式で表現される。
また、直線形高周波電圧印加法による正弦形状高周波電圧は次式で表現される。
2)直流PLLブロックの前段に高周波成分除去用ローパスフィルタを前置して高周波積信号から高周波成分を除去し、直流成分のみからなる直流PLLブロック入力信号を生成する必要があった。しかしながら、前置した高周波成分除去用ローパスフィルタのために、PLL推定系の安定性がしばしば損なわれ不安定化した。
3)PLL推定系の安定性を確保するためのPLL推定系の構造、さらにはPLL推定系の制御器設計法は未確立であり、制御器係数の設計は試行錯誤的に行われてきた。
4)直流成分のみからなる直流PLLブッロク入力信号は、少なくとも、高周波電圧の振幅、周波数、固定子インダクタンスの関数であり、これらの変更あるいは変動により、PLL推定系は不安定化した。制御器設計法が未確立のため、高周波電圧の変更に伴い、PLL推定系における位相制御器の再設計に、試行錯誤を伴う多大な労力が強要された。
2) PLL推定系の不安定化の主要因となった高周波成分除去用ローパスフィルタの導入・前置を必要としない、構造的に安定性が確保しやすい位相推定装置を提供する。
3) 第2)目的に示した構造において、PLL推定系の安定性を保証できる設計法を備えた位相推定装置を提供する。
4) 高周波電圧の振幅、周波数、固定子インダクタンスの変更変動がある場合にも、推定系における位相制御器等の再設計を一切必要としない位相推定装置を提供する。
として記述され、高周波積信号自体を直接入力として回転子位相推定値を生成出力する高周波PLL手段と、を備えることが記載されている。
また、2x2行列であるベクトル回転器R(θγ)を以下のように定義する(非特許文献8)。
(9)、(10)式に示した正相信号、逆相信号においては、そのδ軸要素(すなわち、第2要素、sinωht)は印加高周波電圧のγ軸要素(すなわち第1要素、cosωht、(1)〜(3)式参照)に対して、高周波数ωhが正の場合には−π/2(rad)の位相差を有する点には、反対に高周波数ωhが負の場合に約+π/2(rad)の位相差を有する点には、特に注意されたい。本発明では、このような信号を、高周波積信号生成のためのキャリア信号として利用する。このため、これらの信号をキャリア正相信号、キャリア逆相信号と呼称する。
(11)式が明示しているように、一般には、高周波電流の正相成分ihp、逆相成分ihnのいずれにも、回転子位相情報がR(2θγ)up(ωht),R(2θγ)un(ωht)という形式で含まれている。真円軌跡を描く真円形高周波電圧を印加する場合に限り、次の(12)式が成立し、回転子位相情報は高周波電流の逆相成分のみに含まれる(非特許文献8参照)。
(14)式のキャリア和信号も、本信号の元となった(9)、(10)式のキャリア正相信号、キャリア逆相信号と同様に、そのδ軸要素(すなわち、第2要素、sinωht)は、印加高周波電圧のγ軸要素(すなわち第1要素、cosωht、(1)〜(3)式参照)に対して±π/2(rad )の位相差を有する点には、特に注意されたい。
ここに、iδfは駆動用電流(固定子電流の駆動周波数成分)i1fのδ軸要素を意味する。
この場合には、位相積分器の出力が高周波PLLブロックの出力となり、回転子位相推定値(γδ準同期座標系の位相)
本願明細書に記載されている効果の説明に関連して、具体例を交えながら改めて説明するが、高周波PLL手段(高周波PLLブロック)を定めた有理関数の次数を3次以上とする場合には、(すなわち、高周波位相制御器の次数を2次以上とする場合には)、(18)式の減衰率を十分に小さくできる。
1)正弦形状の高周波電圧を印加する狭義高周波電圧印加法(一般化楕円形高周波電圧印加法、一定真円形高周波電圧印加法、直線形高周波電圧印加法等を含む)に広く適用できる、汎用性に富む位相推定装置を実現できるようになる。
2)PLL推定系の不安定化の主要因となった高周波成分除去用ローパスフィルタの導入・前置を必要としない、構造的に安定性が確保しやすい位相推定装置が実現できるようになる。
信号係数Kθは、印加高周波電圧の振幅、周波数、インダクタンス等によって定まる係数である。信号係数は、例えば、(1)〜(3)式に示した一般化楕円形高周波電圧、一定真円形高周波電圧、直線形高周波電圧では、各々次式となる。
上式におけるLmは、d軸インダクタンスLd、q軸インダクタンスLqから一意に定まる鏡相インダクタンスである(非特許文献7参照)。また振動係数Khは、(20)式に明示しているように、0〜2の間で高周波振動するゲイン相当値を係数化したものである。
3次分母多項式が安定な3重実根p0をもつようにするには、有理関数係数(高周波位相制御器係数)は以下のように定めればよい。
この場合、(18)式で記述した高周波残留外乱の低減率は次式となり、一般に十分な低減が確保される。
4次分母多項式が安定な4重実根p0をもつようにするには、有理関数係数(高周波位相制御器係数)は以下のように定めればよい。
この場合、(18)式で記述した高周波残留外乱の低減率は次式となり、一般に十分な低減が確保される。
4次分母多項式が安定な4重実根p0をもつようにするには、有理関数係数(高周波位相制御器係数)は以下のように定めればよい。
この場合、(18)式で記述した高周波残留外乱の低減率は次式のようにゼロとなり、理論上は完全な外乱排除が実施される。
(31)式は、スカラキャリア信号と高周波電流のδ軸要素あるいは高周波電流を含む固定子電流のδ軸要素とのスカラ乗算処理で、高周波積信号が生成できることを意味している。ベクトル乗算と比較するならば、高周波積信号生成のための演算をおおよそ半減できる。以上の説明より明白なように、本願明細書に記載の構成によれば、「高周波電流の正相成分、逆相成分の両成分に含まれる回転子位相情報を、少ない演算量で、高周波積信号に含有させることができる」と言う効果が得られる。ひいては、上述の本願明細書に記載の構成の効果を高めることができる。
(32)式の逆相成分は、印加高周波電圧の振幅、周波数等の影響を受けているが、(33)式の正規化逆相成分は、これらの影響を全て排除した形で、回転子位相情報のみを有している。
(34)式は、積信号は、γδ一般座標系のγ軸から見た回転子位相の正弦値そのものとなってること示している。特に、本積信号は、高周波残留外乱の影響も、印加高周波電圧の振幅、周波数の影響も、更には、電動機のインダクタンスの影響も排除した形となっている。すなわち、直流の積信号となっている。本積信号を、直流PLLブロック、トラッキングオブザーバ等に用いることにより、これらの影響を排除した状態で、αβ固定座標系のα軸からみた回転子位相推定値を得ることができる。上記は、印加高周波信号として高周波電圧を用いた場合の説明であるが、印加高周波信号として高周波電流を用いた場合にも同様の説明が可能である。
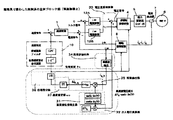
(35)式の高周波電圧指令値生成では、γ軸速度に代わって、回転子電気速度推定値を利用している。図4に明示しているように、電気速度推定値はγ軸速度と本質的に等価であるが、必要に応じ、γ軸速度をローパスフィルタ処理して電気速度推定値を得るようにしている。なお、このときのローパスフィルタは、通常は、簡単な1次フィルタでよい。
すなわち、固定子電流のδ軸要素から駆動用電流指令値のδ軸要素を減じ、実質的に高周波電流のδ軸要素を得て、高周波電流δ軸要素と印加高周波電圧指令値のγ軸要素に対して−π/2(rad)の位相差を有するキャリア信号sinωhtとの(スカラ)乗算処理を通じて、高周波積信号を生成している。本高周波信号の生成は、(38)式の第2式が示しているように、印加高周波電圧のγ軸要素に対して−π/2(rad)の位相差を有する信号をδ軸要素とするキャリア和信号(ベクトル)と高周波電流(ベクトル)の内積処理と等価である。高周波電圧指令値が(35)、(36)式のようにδ軸要素をもつ場合には、キャリア信号を本δ軸要素から直接生成するようにすると、演算量を低減できる。図4はこの例を示している。すなわち、高周波積信号生成器は、実質的にスカラ乗算器のみで実現できる。なお、(37)式のようなδ軸要素を持たない高周波電圧指令値を利用する場合には、高周波電圧指令値のγ軸要素に所定の位相差を付与して、キャリア信号を生成することになる。
この場合、(21)式の第1式で定義した信号係数Kθは次の値をとる。
高周波位相制御器C(s)の係数(有理関数の係数と同一)の設計は、PLL推定系の帯域幅が概ね150(rad/s)となるように、行うものとする。
また、(24)式に定めた高周波残留外乱低減率に関し、以下を得る。
上の高周波位相制御器係数は、試行錯誤的には選定が難しい、桁数の大きく異なる幅のある数値を示している。また、高周波残留外乱低減率は、実用上十分に小さい値を示している。
また、(27)式に定めた高周波残留外乱低減率に関し、以下を得る。
上の高周波位相制御器係数は、試行錯誤的には選定が難しい桁数の大きく異なる幅のある数値を示している。また、高周波残留外乱低減率は、実用上十分に小さい値を示している。
上の高周波位相制御器係数は、試行錯誤的には選定が難しい桁数の大きく異なる幅のある数値を示している。本高周波位相制御器による高周波残留外乱低減率は、(30)式に示したように、ゼロである。
このときの積信号は、(51)式が示しているように、高周波成分を含有しない、直流的な成分である。最終位相生成器では、本積信号を位相同期器で処理して、回転子位相推定値とγδ準同期座標系の速度を出力している。直流的な位相偏差を入力として、回転子位相推定値等を生成出力する役割を担っている位相同期器は、通常の代表的な直流PLL法に基づき構成すればよい。この種の位相同期器の構成法に関しては、非特許文献7等に詳説されており、当業者には公知であるので、これ以上の説明は省略する。位相同期器の出力の1つである座標系速度は、必要に応じてローパスフィルタで処理して、回転子速度推定値として利用される。この点は、図5、8の実施例と同様であるので、これ以上の説明は、省略する。
2 電力変換器
3 電流検出器
4a 3相2相変換器
4b 2相3相変換器
5a ベクトル回転器
5b ベクトル回転器
6 電流制御器
7 指令変換器
8 速度制御器
9 バンドストップフィルタ
10 位相速度推定器
10−1 高周波電圧指令器
10−2 高周波積信号生成器
10−3 高周波位相同期器
10−4 逆相成分抽出器
10−5 正規化器
10−6 最終位相生成器
11 係数器
12 余弦正弦信号発生器
Claims (3)
- 駆動基本周波数より高い周波数をもつ高周波信号の印加に対し回転子が突極特性を示す同期電動機のための駆動制御装置に使用され、かつ、印加高周波信号の応答である応答高周波信号の検出・処理を通じて回転子位相推定値を生成出力する回転子位相推定装置であって、
高周波信号印加のために駆動制御装置内の電力変換器への最終信号指令値に含まれ、かつ、真円軌跡を描く高周波信号指令値を生成する手段と、
高周波信号指令値に起因した応答高周波信号の中から、印加高周波信号に対し逆相順となる逆相成分を抽出する手段と、
抽出した逆相成分をベクトルとして捕らえ、このノルムを1に代表される値に正規化して、正規化逆相成分を生成する手段と、
高周波信号指令値に対し逆相順となるキャリア信号を生成し、生成キャリア信号を用いて正規化逆相成分を処理し、回転子位相推定値を生成出力する手段と、
を備えることを特徴とする回転子位相推定装置。 - 生成される該高周波信号指令値を高周波電圧指令値とし、これに起因した該応答高周波信号を高周波電流とすることを特徴とする請求項1記載の回転子位相推定装置。
- 該キャリア信号を用いた該正規化逆相成分の処理を、回転子位相推定値を基軸(γ軸)位相とする2軸直交のγδ準同期座標系上で遂行することを特徴とする請求項1記載の回転子位相推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013248366A JP5741673B2 (ja) | 2013-11-29 | 2013-11-29 | 同期電動機の回転子位相推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013248366A JP5741673B2 (ja) | 2013-11-29 | 2013-11-29 | 同期電動機の回転子位相推定装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009164237A Division JP5499539B2 (ja) | 2009-06-20 | 2009-06-20 | 同期電動機の回転子位相推定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014060919A JP2014060919A (ja) | 2014-04-03 |
| JP5741673B2 true JP5741673B2 (ja) | 2015-07-01 |
Family
ID=50616855
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013248366A Active JP5741673B2 (ja) | 2013-11-29 | 2013-11-29 | 同期電動機の回転子位相推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5741673B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109327172A (zh) * | 2018-10-25 | 2019-02-12 | 核工业理化工程研究院 | 基于脉振高频电压注入的永磁同步电机控制方法及控制系统 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3968688B2 (ja) * | 2000-11-28 | 2007-08-29 | 有限会社シー・アンド・エス国際研究所 | 交流電動機のベクトル制御方法及び同装置 |
| US6762573B2 (en) * | 2002-02-26 | 2004-07-13 | General Motors Corporation | System and method for estimating rotor position of a permanent magnet motor |
| JP4120775B2 (ja) * | 2002-03-18 | 2008-07-16 | 有限会社シー・アンド・エス国際研究所 | 交流電動機のベクトル制御方法及び同装置 |
| JP4178834B2 (ja) * | 2002-05-24 | 2008-11-12 | 株式会社明電舎 | Pmモータの制御装置 |
| US6763622B2 (en) * | 2002-10-10 | 2004-07-20 | General Motors Corporation | Amplitude detection method and apparatus for high frequency impedance tracking sensorless algorithm |
| US7602139B2 (en) * | 2006-07-13 | 2009-10-13 | International Rectifier Corporation | Signal conditioning apparatus and method for determination of permanent magnet motor rotor position |
| JP5176406B2 (ja) * | 2007-05-24 | 2013-04-03 | 日本電産株式会社 | 交流電動機の回転子位相速度推定装置 |
-
2013
- 2013-11-29 JP JP2013248366A patent/JP5741673B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014060919A (ja) | 2014-04-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5720677B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| Wu et al. | Enhanced position sensorless control using bilinear recursive least squares adaptive filter for interior permanent magnet synchronous motor | |
| Sun et al. | Unified wide-speed sensorless scheme using nonlinear optimization for IPMSM drives | |
| JP6492320B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| JP4587110B2 (ja) | 同期電動機駆動制御のための回転子位相推定方法 | |
| CN105024615A (zh) | 一种永磁同步电机低速无传感器控制方法及装置 | |
| JP5176406B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| Wu et al. | Multiple discrete adaptive filter based position error reduction for sensorless IPMSM drives | |
| JP4899509B2 (ja) | 交流電動機の回転子位相推定装置 | |
| JP5499539B2 (ja) | 同期電動機の回転子位相推定装置 | |
| Wu et al. | Improved position observer using adaptive training control-based filter for interior permanent magnet synchronous motor drives | |
| JP5741673B2 (ja) | 同期電動機の回転子位相推定装置 | |
| JP5692572B2 (ja) | 同期電動機の駆動制御装置 | |
| Manzolini et al. | The crowded axis of the frequency: Optimal pole/zero allocation for a full speed sensorless synchronous motor drives | |
| JP2016201923A (ja) | モータの回転位置推定方法およびモータの制御装置 | |
| Li et al. | High-frequency response current direct demodulation method for sensorless control of interior permanent magnet synchronous motor drives | |
| JP2015037376A (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| CN108494307B (zh) | 一种永磁同步电机的逆变器非线性效应补偿方法 | |
| Pravica et al. | Interior permanent magnet wind generator torque estimation considering low-pass filter phase shift compensation | |
| JP5828441B2 (ja) | 同期電動機のための回転子位相推定装置 | |
| JP6150212B2 (ja) | 交流電動機のデジタル式回転子位相速度推定装置 | |
| JP2016003926A (ja) | 2相信号位相検出装置及び2相信号位相検出方法 | |
| JP5169014B2 (ja) | 交流電動機のための位相推定法 | |
| JP5423263B2 (ja) | 交流電動機の回転子位相速度推定装置 | |
| JP2017085720A (ja) | 永久磁石同期電動機の位置センサレス制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140924 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140929 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150331 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150413 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5741673 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |